基于能量预测的增程式电动汽车分时混动能量管理策略∗
2017-05-12林歆悠莫李平张少博
林歆悠,莫李平,罗 勇,张少博
(1.福州大学机械工程及自动化学院,福州 350002; 2.重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400054)
基于能量预测的增程式电动汽车分时混动能量管理策略∗
林歆悠1,莫李平1,罗 勇2,张少博1
(1.福州大学机械工程及自动化学院,福州 350002; 2.重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400054)
本文中针对增程式电动车提出一种基于能量预测的分时混动能量管理策略。首先,根据静态导航历史数据,利用决策树算法的原理分别设计了基于移动平均和基于突发事件的两种能量预测算法;接着,对两种预测算法分别进行测试,分析其特点;最后,根据模拟的历史数据和未来数据,预测能量使用情况,分析预测精度,并比较分时混动能量管理策略在两种预测算法下的能量分配情况。结果表明:无论对于循环初期SOC的渐增,中期的突变,还是末期的波动,基于移动平均预测都优于基于突发事件的预测。
增程式电动汽车;能量预测;分时混动;移动平均;突发事件
前言
随着混合动力汽车的普及,10%左右的实际节油率与30%左右的期望节油率还存在差距。另外随着汽车越来越趋向于互联,汽车众多大数据平台建设的逐渐完善,可收集历史数据对车辆的行驶过程进行控制,使车辆更节能,更高效。
文献[1]中利用隐式马尔科夫链预测行驶路线,利用回归树预测行驶速度,并比较不同驾驶员(激进的和温和的)和不同的驾驶条件下的能量消耗。文献[2]中针对混合动力汽车行驶环境适应性的问题,提出一种适应于随机多变的交通状况和基于实时行驶工况预测的能量管理策略。采用1阶齐次马尔科夫链状态转移概率矩阵,对主干道和快速路建立了行驶工况特征参数预测模型。
文献[3]中介绍了一款能进一步改善油耗,减小排放的软件,它基于GPS信息,能使车辆在进入拥堵区之前提前充电,从而在该区域全电驱动。文献[4]中利用GPS获得的公交车运行历史数据,通过适当的离散化,建立了一个与位置有关的非齐次Markov车速转移模型,用来描述路况和预测混合动力公交车的未来运行状况,通过Markov动态优化,得到了一个与位置有关的、依状态反馈的混合动力公交车能量管理策略。文献[5]中在确保车辆动力性的前提下,以氢耗最小为目标,开发基于预测控制的能量源混合度自适应控制策略,运用DERICT算法对其能量源的混合度进行优化。
文献[6]中指出,标准工况提供了一种简单的方法来评估车辆消耗的能量,但在实际中,真正起决定作用的还是驾驶员,更重要的是其他车辆对驾驶员的影响,采用地图和导航软件ADAS-RP联合Autonomie来预测用户指定路线所消耗的能量。文献[7]中通过预测行驶里程、需求能量、制动回收能量和持续时间来对车辆进行高阶控制,降低车辆能耗,并针对不准确预测提供解决方案。文献[8]中针对插电混动车阐述了一种基于需求能量预测的控制策略,首先,用神经网络模型来预测车辆的能量需求,接着,将能量由数学模型转化为电池的SOC,最后用A-ECMS控制策略来追踪SOC,并决定动力分配。
文献[9]中用导航信息来预测可能的回收能量,并针对极端工况和丘陵地带,故意耗尽电能和发动机一起为车辆提供高功率需求。文献[10]中通过车辆与其他车辆和基础设施交互,预测车辆未来60s的驾驶状态,找到最接近的行驶工况,从而确定未来时间窗口内的最优能量分配。
另外,关于增程式电动车能量管理策略,主要根据电池SOC的状况,目前主要有全时混动[11]和分时混动,前者全程开启增程器并未考虑行驶工况的变化,后者可实现根据行程里程及工况分阶段开启增程器。
本文中针对增程式电动车提出一种基于能量预测的分时混动能量管理策略,以某一段里程为片段,根据历史能量使用情况,利用决策树算法来对未来这一片段的需求能量进行预测,比较基于移动平均和基于突发事件两种预测方法的优劣。
1 能量预测分时混动策略的制定
为了尽可能利用电网对增程式电动车充电,而在行程即将终结时尽量不使用APU,设计了一套基于能量预测的分时混动能量管理策略。
1.1 控制策略设计原理
基于能量预测的分时混动能量管理策略流程图如图1所示。图中,Epred为车辆在设定的整个循环工况(cycle)中需要消耗的预测能量,Eused为随着cycle的进行实际已经消耗的能量,Ereq为完成剩余的cycle所需要的能量。通过Ereq和电池的可用能量Ebat的比较,设定不同的SOC阈值。对于能量预测的分时混动具体可分为以下3种情况。
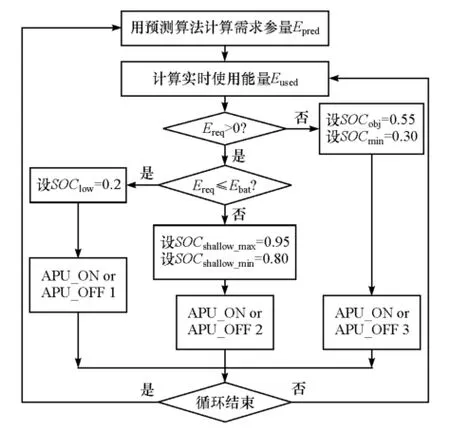
图1 基于能量预测的分时混动能量管理策略流程图
(1)剩余需求能量小于电池的初始能量
当电池的初始能量Ebat大于预测能量Epred,又因为在某一cycle的初始阶段,Eused从零开始逐渐增加,此阶段即会出现Epred≤Ebat状态,从而进入APU_ON or APU_OFF 1。随着cycle的进行,Eused逐渐增大,直至Eused大于预测能量Epred,此时出现Ereq<0状态,从而进入到APU_ON or APU_OFF 3。其SOC变化过程如图2所示。当进入Ereq≤Ebat状态时,电池有足够的能量驱动车辆,而不用增程器提供额外的能量。车辆将运行在纯电模式,车辆零排放而且运行效率比较高。
(2)剩余需求能量大于电池的初始能量
当电池的初始能量Ebat小于预测能量Epred,预测能量Epred大于或者等于整个cycle所消耗的最大能量时,在cycle的初始阶段,即会出现Ereq>Ebat状态,从而进入APU_ON or APU_OFF 2。随着cycle的进行,Eused逐渐增大,直至Ereq≤Ebat,从而进入到APU_ON or APU_OFF 1。其意义为:当电池中的能量不足以使车辆完成整个cycle时,增程器首先开启并保证电池SOC在一个狭小的范围内波动,直到Ereq小于或等于Ebat。这个狭小SOC的范围一般取在电池上端容量的20%以内。满足此规则下的SOC变化情况如图3所示。

图2 Ereq≤Ebat时SOC变化情况
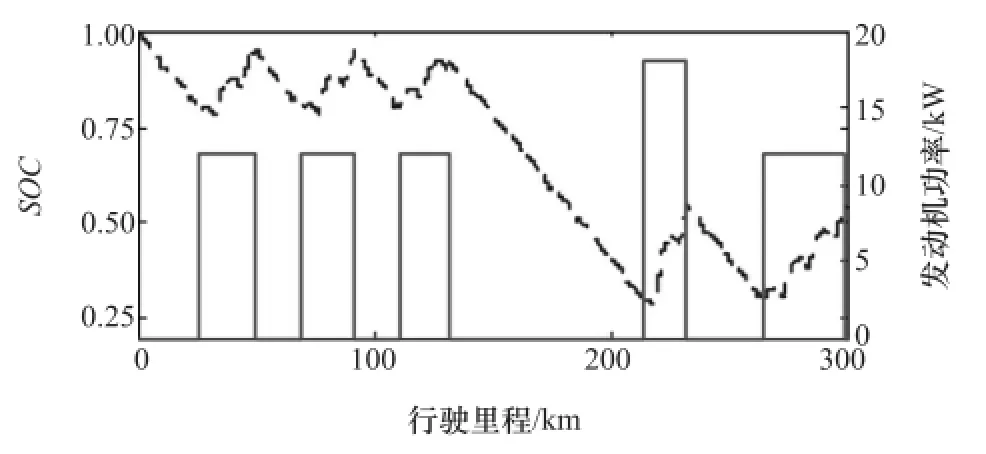
图5 Epred为30kW·h时的能量分配情况

图6 Epred为50kW·h时的能量分配情况
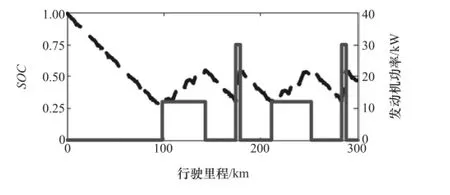
图7 Epred为20kW·h时的能量分配情况

图3 Ereq>Ebat时SOC变化情况
(3)剩余需求能量小于零
前面(1)和(2)两种情况适用于某一cycle的预测能量Epred与实际使用的能量相差不大的情况下,即行驶cycle没有明显变化。但当驾驶员突然改变其习惯的cycle而行驶更长的里程或者改变其固有的循环工况,即由于驾驶员的行为发生突变而导致预测能量Epred可能远小于实际使用的能量,而大于动力电池的初始能量Ebat时,满足此条件下的SOC变化情况如图4所示。首先,在cycle的初始阶段,由于Ereq>Ebat,而进入到APU_ON or APU_OFF 2;其次,随着cycle的进行,Eused逐渐增大,直至Ereq≤Ebat,从而进入到APU_ON or APU_OFF 1;最后,由于Epred小于实际使用的能量,随着Eused的继续增大,直至Ereq<0,而进入到APU_ON or APU_OFF 3。为保证在cycle结束时,可利用廉价的电网对电池充电,将电池的SOC保持在一个低的范围内波动。
1.2 控制策略验证
仿真验证条件设置:NEDC工况运行300km,Ebat为25.2kW·h。由于其在NEDC工况下的能量消耗为45.6kW·h,故针对Epred假设3组数据,分别为30,50和20kW·h。在整车模型中对基于预测的分时混动能量管理策略进行验证,所对应的能量分配情况分别如图5~图7所示。

图4 Ereq<0时SOC变化情况
在图5所示情况下,由于在cycle开始阶段,Ereq>Ebat,故SOC先在高带波动;随着Eused的增大,Ereq≤Ebat,故进入到纯电动模式;Eused继续增大,当Eused>30kW·h时,Ereq<0,此时由于Epred过小,SOC进入低带波动。而整个cycle中使用了两个工作点
Pmid_load和Plow_load。
在图6所示情况下,由于在cycle开始阶段,Ereq>Ebat,故SOC先在高带波动。随着Eused的增大,Ereq≤Ebat,故进入纯电动模式,而由于Epred大于实际使用的能量,故纯电动状态维持到cycle结束。而整个cycle中使用了两个工作点Ppeak_load和Plow_load。
在图7所示情况下,由于在cycle开始阶段,Ereq≤Ebat,故进入纯电动模式;Eused继续增大,当Eused>20kW·h时,Ereq<0,此时由于预测过小,进入到低带波动。而整个cycle中使用了两个工作点Ppeak_load和Plow_load。
2 基于决策树算法的能量预测
2.1 决策树预测算法基本模型的建立
从一个目的地到另一个目的地,一个人每天可能行驶同样的路线,但可能由于交通状况和驾驶员的偶然因素使循环工况会略有变化,即车辆的能量需求可能在一定范围内波动。在智能网联技术日臻成熟的背景下,整车控制器VCU能够计算单位里程所使用的能量并将这些数据储存在储存器中,或经由云端加工处理反馈给车辆。预测算法的功能是利用这些存储的数据基于一定的规则预测给定里程所消耗的能量。预测模型设计的规则条件如下。
(1)以北京市平均通勤里程为例,其单程19.2km,每天往返约40km,而设计的增程式电动车纯电里程为80km,且为避免频繁充电,设定每个cycle为300km。
(2)如果过去的n个cycle驾驶员行驶同样的路线,则他很可能在第n+1个cycle行驶同样的路线。
(3)如果驾驶员建立一个新的驾驶习惯,或者在新路线行驶至少4个cycle,驾驶员很可能在下个cycle行驶相同的路线。在新路线行驶少于4个cycle的可认为是突发事件。
一段行驶里程内每300km的能量消耗作为初始数据集存储在存储器中,且数据集随着每个cycle的完结而基于先进先出(first in first out,FIFO)规则进行更新,用数据集中的n个cycle的能量使用情况来预测下一个cycle的能量。
假设过去n个cycle的实际使用能量分别为X1,X2,X3,…,Xn,则n个cycle的平均使用能量Xavg_n可表示为

在实际中,驾驶员可能在上一个cycle行驶NEDC工况,而在下一个cycle行驶CUDC工况,工况的变化必然引起所消耗能量的变化。定义较大的能量消耗偏差约束条件为

式中Xn_new为上一个cycle的实际使用能量。
在实际中,即使同一条线路,驾驶员也不可能像赛车手一样精准,在每个cycle中都会按照标准循环工况准确驾驶车辆。而在循环工况中的速度变化将影响车辆每个cycle的能量消耗。定义较小的能量消耗偏差为

它表征连续cycle过程中,驾驶员的能量使用模式。
为适应不同行驶工况的预测需求,分别设计了移动平均预测算法(mean algorithm,MA)和突发事件预测算法(sharp algorithm,SA),由于篇幅关系,具体的算法从略,其实现的流程分别如图8和图9所示。

图8 基于移动平均预测算法流程图
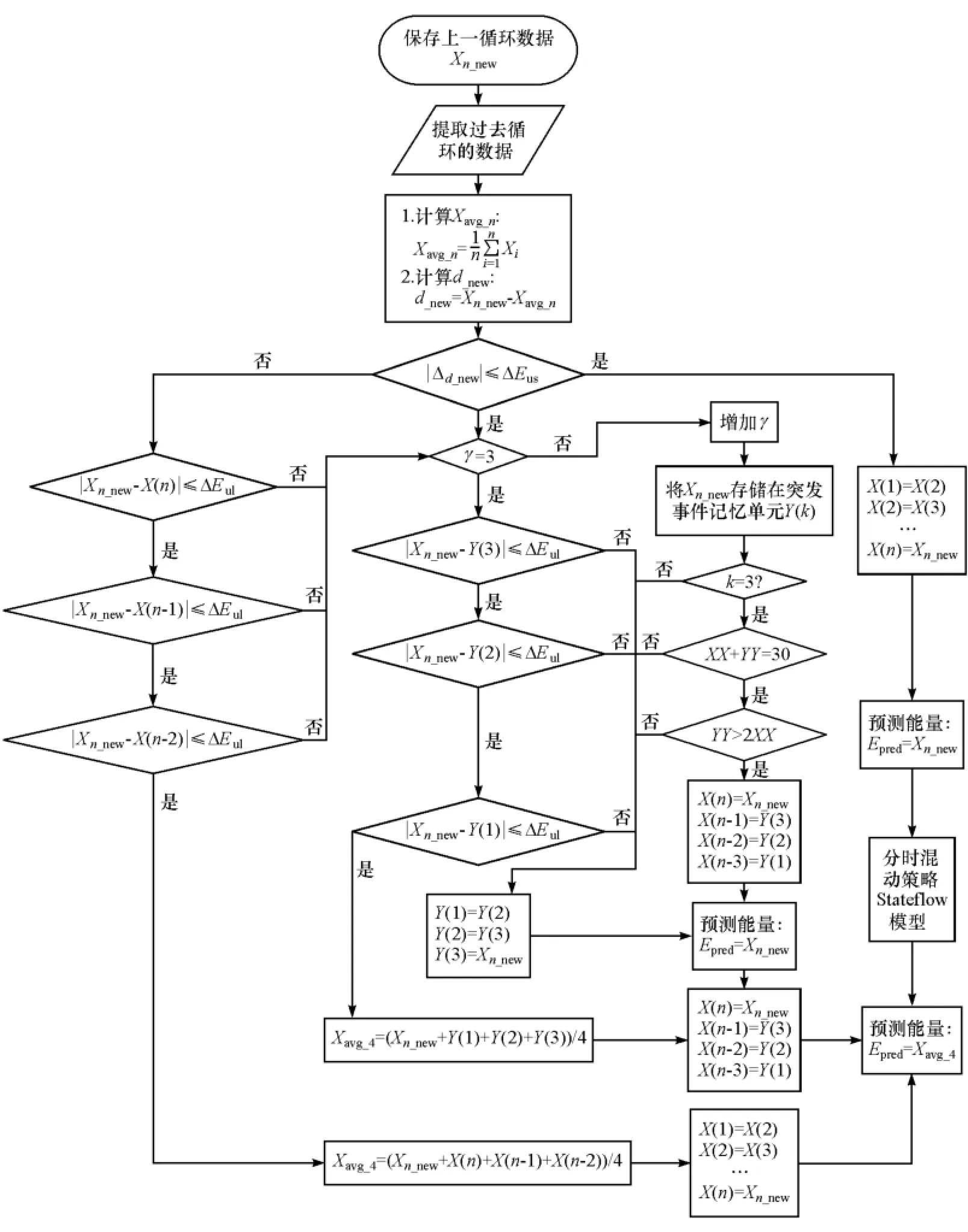
图9 基于突发事件预测算法流程图
2.2 预测算法验证
为验证预测算法的可行性,这里以模拟驾驶员每个cycle都以不同的工况行驶的情况为例进行说明。设定约束条件如下:
(1)主记忆单元样本个数:10;
(2)初始主记忆单元:[10 10 10…10 10];
(3)初始辅助记忆单元:[0,0,0];
(4)未来连续10个cycle实际使用的能量:[10 20 30 40 50 40 30 20 10 10]。
图10为两种能量预测算法的验证结果。由图可见:由于从cycle12到cycle18,每个cycle消耗的能量都不同,基于移动平均的预测能量为其更新后的主记忆单元的平均值;而基于突发事件的预测算法识别出cycle12,cycle13和cycle14为突发事件,并将其存储于辅助记忆单元,当以cycle15的使用能量作为输入时,cycle15的使用能量和辅助记忆单元中的数据一并写入主记忆单元,同时辅助记忆单元清零,而预测即为cycle12,cycle13,cycle14和cycle15的平均。
图11为两种算法预测能量与实际使用能量的偏差率。如果预测能量Epred小于实际使用的能量Eused,并且动力电池的能量Ebat小于实际使用的能量Eused,则电池的SOC将终结于SOC低带波动;如果预测能量Epred大于实际使用的能量Eused,并且动力电池的能量Ebat小于实际使用的能量Eused,则电池的SOC必先经过SOC高带波动。从cycle12到cycle17,两种算法的预测能量都低于实际使用的能量,使电池的SOC都将终结于SOC低带波动。对于cycle18,由于基于突发事件的预测能量和实际使用能量相等,电池的SOC将先经过高带波动,最终以纯电动模式终结cycle。对于cycle19和cycle20,两种算法的预测能量都大于实际使用能量,如果实际使用的能量大于电池的能量,则电池的SOC先经过高带波动,然后进入纯电动模式直至cycle完结;如果实际使用的能量小于电池的能量,且电池的能量大于预测能量,则电池的SOC整个cycle都处于纯电动模式直至完结;如果实际使用的能量小于电池的能量,且电池的能量小于预测能量,则电池SOC必经过高带波动,可能终结于高带波动或纯电动模式。

图10 两种能量预测算法的验证结果
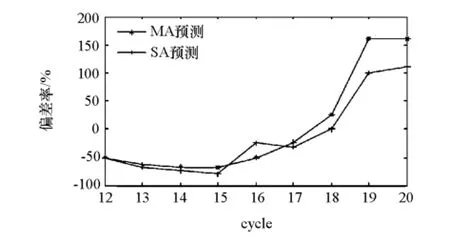
图11 两种算法预测能量与实际能量的偏差率
3 能量管理策略仿真验证
3.1 循环工况随机化模拟
选定中国轻型车辆城市工况CUDC和新欧洲行驶工况NEDC进行仿真验证。由于ΔEul设定为实际使用能量的10%,而CUDC和NEDC循环工况±10%的速度变化如图12和图13所示,故分别将6种工况在整车模型中运行400km,得到能量消耗随里程而变化的关系;由于本文中所选cycle为300km,所以CUDC工况±10%的变化相当于±4.5kW·h,NEDC工况±10%的变化相当于±3.7kW·h。
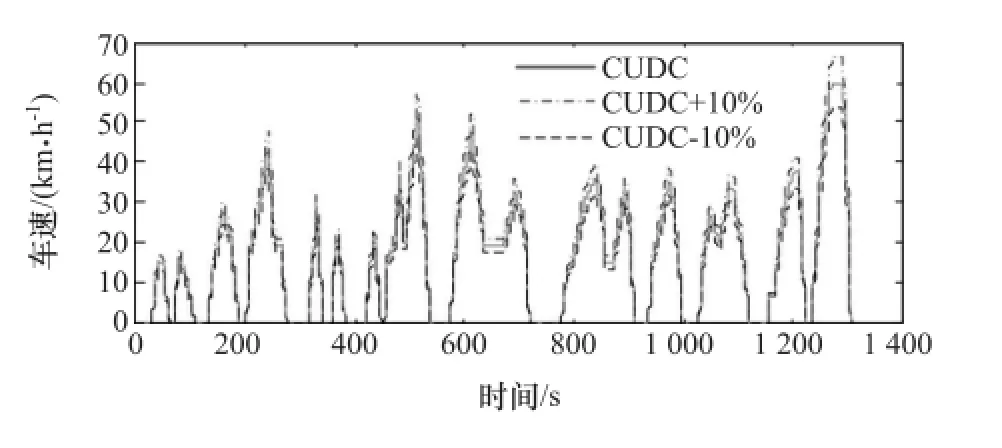
图12 CUDC工况随机模拟

图13 NEDC工况随机模拟
初始主记忆单元的数据设计考虑到NEDC± 10%工况运行300km时的能量波动,如表1所示。考虑到NEDC工况渐增、NEDC工况到CUDC工况突变、CUDC工况渐增、CUDC工况渐减和NEDC工况波动,其表现如表2所示。并控制渐增,渐减,波动在±10%范围内变化。

表1 初始主记忆单元的参照样本kW·h
基于移动平均和基于突发事件的预测结果如图14所示。图15为两种算法预测能量与实际能量的偏差率。两种预测在行驶工况发生突变时都存在预测滞后现象。基于移动平均的算法可以预测到初始阶段的渐增,而基于突发事件的则不能。从cycle31到cycle37,两种预测精确度几乎相同。对于循环末期波动的预测,基于移动平均的预测精确度优于基于突发事件的预测。
3.2 基于能量预测分时混动能量管理策略验证
由图15中选取cycle30和cycle42预测能量,如表3所示。将其代入所设计的分时混动能量管理策略中,cycle30中电池SOC和发动机功率分别如图16和图17所示,cycle42中电池SOC和发动机功率变化情况分别如图18和图19所示。

图16 cycle30两种预测及期望的SOC变化情况

图17 cycle30两种预测及期望发动机功率变化情况

表2 未来cycle的实际使用能量kW·h

图14 两种算法的预测结果

图15 两种算法预测能量与实际能量的偏差率

表3 典型对比事件
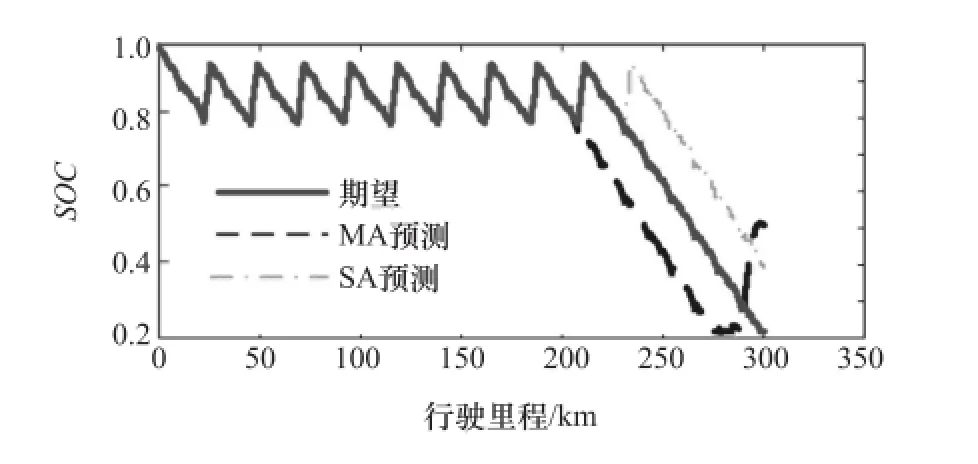
图18 cycle42两种预测及期望的SOC变化情况

图19 cycle42两种预测及期望发动机功率变化情况
功率,使APU再度开启,最终SOC终结于低带波动;由于基于突发事件的预测能量大于实际消耗的能量,使cycle终结时,SOC没有降到其低限值。
4 结论
(1)对于初始阶段的渐增渐变,基于移动平均的算法可预测到初始阶段的渐增,而基于突发事件的则不能,基于移动平均的预测优于基于突发事件的预测。
(2)对于突变,两种算法都存在预测滞后现象。基于移动平均的预测精度略优于基于突发事件的预测精度。
(3)对于循环末期的波动与渐变,基于移动平均的预测精度优于基于突发事件的预测精度。
[1] MAGNUSON B,MALLORY M,FABIEN B,et al.Improving fuel economy of thermostatic control for a series plugin-hybrid electric vehicle using driver prediction[C].SAE Paper 2016-01-1248.
[2] 张昕,王松涛,张欣,等.基于马尔可夫链的混合动力汽车行驶工况预测研究[J].汽车工程,2014,36(10):1216-1236.
[3] BASSETT M,BRODS B,HALL J,et al.GPS based energy management control for plug-in hybrid vehicles[C].SAE Paper 2015- 01-1226.
[4] 方越栋.基于随机动力需求预测的并联混合动力公交车能量管理策略[D].杭州:浙江大学,2015.
[5] 张赛.燃料电池轿车模型预测控制及能量源混合度优化[D].上海:同济大学,2014.
[6] KARBOWSKI D,PAGERIT S,CALKINS A.Energy consumption prediction of a vehicle along a user-specified real-world trip[C]. EVS26 International Battery,Hybrid and Fuel Cell Electric Vehicle Symposium,2012,Los Angeles,USA:1-12.
[7] QUIGLEY C.The use of vehicle navigation information and prediction of journey characteristics for the optimal control of hybrid and electric vehicles[C].SAE Paper 2011-01-1025.
[8] FENG Tianheng,YANG Lin,GU Qing,et al.A supervisory control strategy for plug-in hybrid electric vehicles based on energy demand prediction and route preview[J].IEEE Transactions on Vehicular Technology,2014,64(5):1691-1700.
[9] CHO B.Control of a hybrid electric vehicle with prediction journey estimation[D].Cranfield University,School of Engineering,2008. [10] DONATEO T,PACELLA D,LAFORGIA D.Development of an energy management strategy for plug-in series hybrid electric vehicle based on the prediction of the future driving cycles by ICT technologies and optimized maps[C].SAE Paper 2011-01-0892.
[11] VOLKAN S,METIN G,SETA B.A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicle [J].IEEE Transactions on Vehicular Technology,2011,60(8): 3557-3570.
由图16和图17可见,对于cycle30,由于预测能量小于实际使用能量,使两种预测的控制都在cycle末期出现低带波动,相对应的发动机工作次数和工作时间都会增加。由图18和图19可见,对于cycle42由于基于移动平均的预测能量小于实际消耗的能量,在电池SOC达到最低限时,依然存在需求
Part-time Hybrid Energy Management Strategy for Range-extended Electric Vehicle Based on Energy Prediction
Lin Xinyou1,Mo Liping1,Luo Yong2&Zhang Shaobo1
1.College of Mechanical Engineering and Automation,Fuzhou University,Fuzhou 350002; 2.Chongqing University of Technology,Key Laboratory of Advanced Manufacturing Technology for Automobile Parts,Ministry of Education,Chongqing 400054
A part-time hybrid energy management strategy based on energy prediction is proposed for rangeextended electric vehicle in this paper.Firstly according to static navigation data,two energy prediction algorithms based on moving average and emergency respectively are devised by utilizing the principle of decision tree algorithm. Then the two prediction algorithms are tested with their features analyzed respectively.Finally,according to historical and future data simulated,the situation of energy use is predicted,the accuracy of prediction is analyzed,and the energy distributions of part-time hybrid energy management strategy with two different prediction algorithms are compared.The results show that moving average-based prediction is better than emergency-based prediction no matter for the gradual increase of SOC in initial stage,its mutation in middle stage or its fluctuation in end stage.
range-extended electric vehicle;energy prediction;part-time hybrid;moving average;emergency
10.19562/j.chinasae.qcgc.2017.04.001
∗国家自然科学基金(51505086)、重庆市基础与前沿研究计划项目(cstc2013jcyjA60004)和重庆市教委科学技术研究项目(KJ1500927)资助。
原稿收到日期为2016年7月15日。
莫李平,硕士研究生,E-mail:980900094@qq.com。
