一种基于数据流趋势与相关性分析的汽油机空燃比故障实时检测方法∗
2017-05-12吴士力唐振民陈成勇
吴士力,唐振民,陈成勇
(1.南京理工大学计算机科学与工程学院,南京 200094; 2.南京交通职业技术学院-长安福特汽车有限公司联合实验室,南京 211188)
一种基于数据流趋势与相关性分析的汽油机空燃比故障实时检测方法∗
吴士力1,唐振民1,陈成勇2
(1.南京理工大学计算机科学与工程学院,南京 200094; 2.南京交通职业技术学院-长安福特汽车有限公司联合实验室,南京 211188)
本文中根据汽油机空燃比故障的特点,提出了一种基于数据流趋势异常和相关性分析的故障实时检测方法。为了提高准确率和运行效率,通过衰减和时间判断法在误差累积和算法CUSUM基础上进行改进,对数据流之间的相关性进行快速估计,使整个系统能运行在对资源比较敏感的车载平台上。在长安福特发动机上的实验结果表明,相比传统的基于SVM和神经网络的故障检测方法,该方法能以较低的资源消耗获得更好的故障检测效果。
汽油机;空燃比故障;实时故障检测;数据流趋势;累积和算法;相关性
前言
发动机实时故障检测技术对保障发动机正常工作以及车辆行驶安全都有积极的意义。汽油发动机的故障种类繁多,不同类型故障的检测方法一般有较大区别,本文中针对空燃比故障的实时检测方法展开研究。空燃比故障是指气缸内的实际空燃比值(A/F)明显偏离理论值14.7。实际值大于理论值表明可燃混合气过稀,反之则过浓。如果不及时修理会影响发动机的动力、排放和使用寿命,极端情况下还可能造成发动机在运行过程中突然熄火。
空燃比控制涉及燃油供给、进气、排放等多个控制环节,其复杂的非线性控制模型难以被精确建模。但发动机控制系统中数十个传感器和执行器在运行时会源源不断产生大量的数据,在时序上形成了数据流,其中蕴含着丰富的发动机工况信息,所以直接对其进行分析往往会比分析模型更为经济有效[1-2]。目前,这种通过挖掘历史数据来获取系统状态和运行规律的数据驱动算法大致可以分为3类[3-4]:(1)机器学习,如SVM(support vector machine)、神经网络等;(2)统计模型,如PCA(principal component analysis),PLS(partial least squares)和ICA(independent component analysis)等;(3)信号处理,如频谱、趋势和相关性分析等。前两类方法在发动机故障识别与诊断领域已经取得了大量的研究成果[5-9]。但在实际运行过程中,发动机的控制状态会随着运行环境的变化而变化,使得采用固定模型的SVM、神经网络和统计模型难以适应。频谱分析主要应用于振动信号的处理[10],难以对发动机系统中的非振动信号进行有效分析。趋势分析是一种高效的时域信号处理方法,能够直接获取信号的过程演变特征[11-13]。相关性分析则根据各个信号变量之间的相关程度及其变化情况来分析系统状态[14]。后两种方法不依赖于具体的模型,可用来捕捉存在状态漂移的时变系统异常。
现代发动机都采用氧传感器来测量空燃比,但不同类型氧传感器的输出信号是不一样的。为了提高故障检测系统的通用性,本文中根据燃油修正值来获得空燃比的稀浓状态。燃油修正是一种用来帮助控制系统平衡空燃比的控制策略,有短期修正(short term fuel trim,STFT)和长期修正(long term fuel trim,LTFT)两种[15]。当混合气稀时,STFT值为正值,发动机系统会在当前基础喷油量上增加燃油供应,反之相反。如果STFT值超过调整极限,空燃比还是无法保持在理论值附近时,系统会通过LTFT调整基础喷油量。如果调整依然失败,OBD (on board diagnostic)系统就会进行故障报警。如果故障规模较小,通过STFT就可以对空燃比进行修正,使得LTFT不会介入或者即使介入也难以达到故障报警极限,导致故障难以被及时发现。因此,基于STFT数据变化来实时检测空燃比故障具有明显的实际意义。
燃油修正的初始值一般都设为0。但器件老化磨损、燃油质量、积碳、运行环境等因素都会引起修正值偏离初始值,这意味着无法只根据STFT值的大小来判断空燃比平衡与否。由于空燃比突然失去平衡时STFT信号趋势必定会发生突变,所以通过STFT信号在短时间内的趋势变化可以判断空燃比有无异常。但这种情况既可能由故障引起,也可能是因为发动机处于急加速工况或者EGR(exhaust gas recirculation)正在工作。考虑到发动机在无故障状态下工作时,各个传感器和执行器参数之间往往都具有一定的线性关联性[16]。比如发动机转速和进气流量之间呈正比关系。一旦发生故障,这种关联性就会遭到破坏。比如进气管漏气故障会使发动机转速上升但进气流量计的输出值反而下降。所以在STFT趋势分析的基础上,还有必要再结合数据流之间相关性的分析结果,以此来提高识别空燃比故障的准确率。
综上,本文中通过对相关数据流进行在线趋势和相关性分析来实时检测发动机的空燃比故障。考虑到整个故障检测系统将以车载的方式运行,分别对现有的趋势提取算法和相关性计算方法进行了改进,在保证准确率的同时降低其时空复杂性,以减少计算资源消耗。为了方便讨论,本文中讨论所用的数据流样本全部采集自福特Duratec 1.5L发动机。
1 趋势分析算法
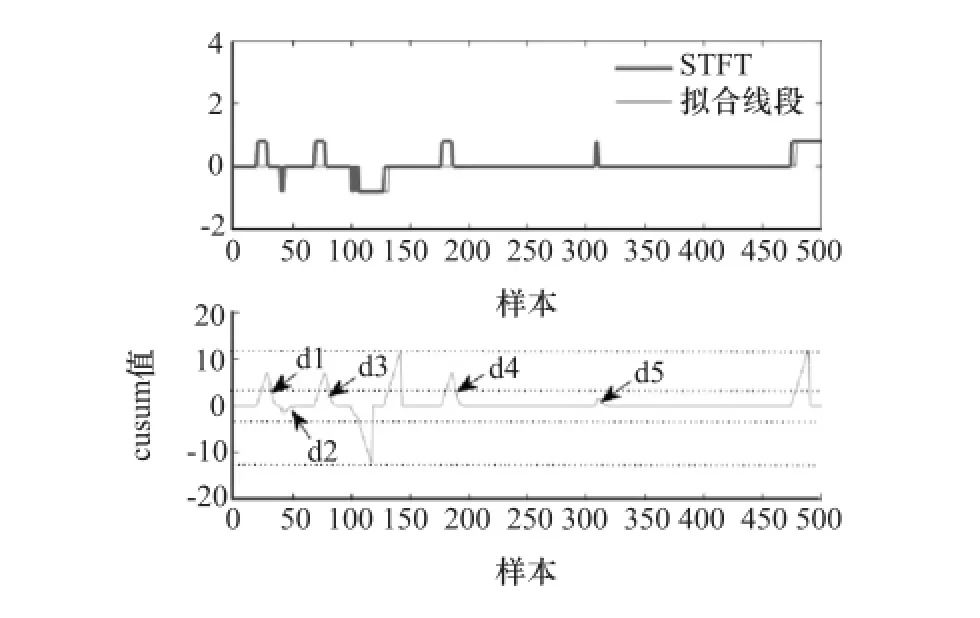
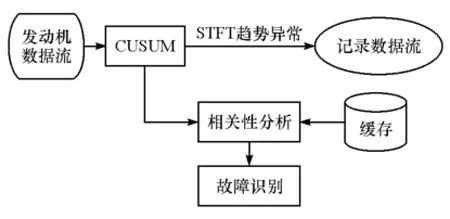
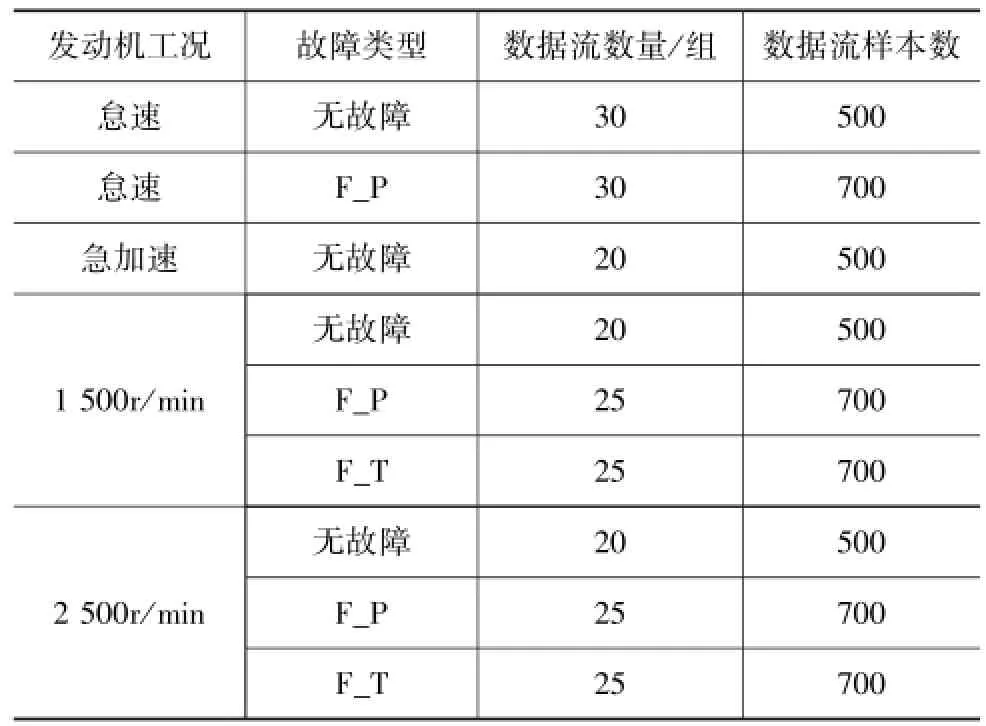
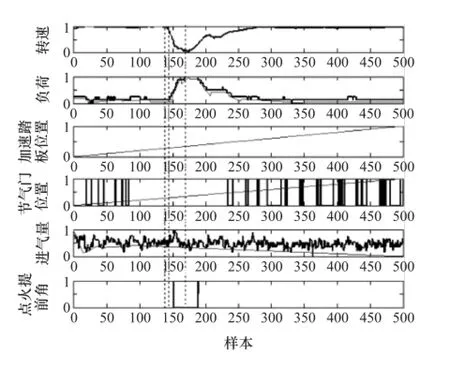
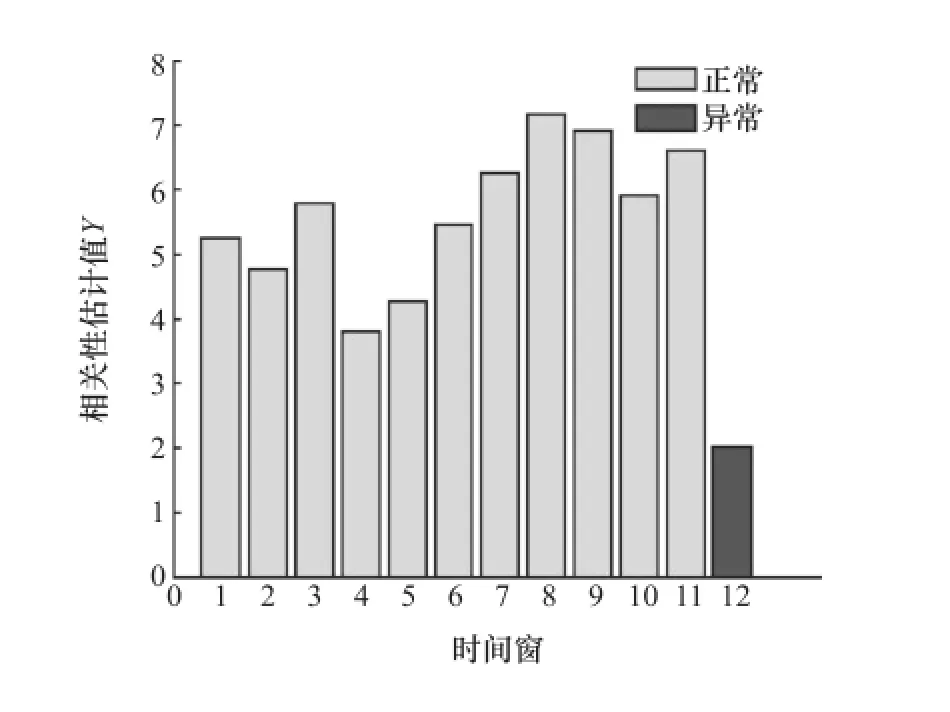
针对时序信号的趋势分析方法有很多,分段线性表示法以其简单直观得到广泛应用。其基本形式为:将数据流T={t1,t2,…,tn}分割成k(k 分段线性法的实施方法可以分为自顶向下、自底向上和滑动窗3种[17]。APCA(adaptive piecewise constant approximation),PAA(piecewise aggregate approximation)和PLA(piecewise linear approximation)等离线分段算法都采用了前两种方式。本文中采用的滑动窗是一种在线分段方式,这对实时处理发动机数据流是必要的。 1.1 CUSUM算法概述 CUSUM(cumulative sum of errors)算法采用最小二乘法对数据流进行线性拟合,根据累积的拟合残差值来判断当前的拟合线性分段是否合适[18-19],其具体算法如下。 设在时刻ti,信号yti的线性拟合值为 式中:ts为拟合线段的起始时间;ks为该线段的斜率;bs为ts时刻该线段在y轴上的截距。在ti时刻拟合分段的残差为则从ts时刻起至ti时刻的累积残差为 设在tj(j>i)时刻,有 在任意时刻ti,累积残差值cusumti都会和阈值Th1和Th2进行比较: 如果|cusumti|≤Th1,则认为当前拟合分段可以被接受; 如果Th1<|cusumti| 如果|cusumti|≥Th2,则认为当前拟合分段不再适合数据流,需要对缓存中的数据进行重新拟合,并将cusumti重置为0,缓存清空。 根据算法原理可知,阈值Th1和Th2对CUSUM的拟合结果有直接影响。Th1一般用于过滤信号中的噪声;Th2决定了算法对信号突变的反应时间。当数据流发生明显大于噪声的突变时,当前的拟合分段会快速偏离数据流,使得累积残差的绝对值迅速增加。所以,合理的Th1和Th2可以使CUSUM算法既对信号中的显著变化反应迅速,又能尽量避免被噪声干扰,从而对数据流的变化趋势进行正确跟踪。 1.2 改进CUSUM算法 最小二乘法一般在信号噪声服从正态分布的情况下会取得好的拟合效果。虽然发动机上各种电器会产生各种强度的电磁噪声,但从OBD口获取的发动机信号的噪声已经被ECU过滤掉,叠加在信号上的干扰部分主要是不服从正态分布的随机抖动。因此,在使用CUSUM算法拟合发动机数据流时很容易受到抖动的干扰。图1所示的是CUSUM算法(Th1=3,Th2=12)在STFT数据流(发动机处于正常平稳运行状态)上的拟合结果。 图1 CUSUM算法拟合STFT数据流 由图可见:STFT数据流上的抖动类似于矩形波,其振幅几乎都相同,但发生间隔和持续时间明显不服从正态分布;在样本时间大约为70和105时,累积残差值都因为信号的抖动而超过阈值Th2,从而引发两次不合理的回归(如a,b箭头标记);在样本时间大约170处的信号抖动使得累积残差值长时间位于阈值Th1和Th2中间,导致接下来的回归操作需要处理位于缓存块中的大约300个样本点。虽然通过增加Th1和Th2的值可以抑制抖动带来的不利影响,但是也会延迟CUSUM算法对趋势变化的响应速度。针对STFT信号上抖动的特点,可以从以下几个方面对CUSUM算法进行改进。 (1)当累积残差值没有随着新样本数据的到来而发生明显变化(变化的标准可以根据数据流的方差进行设定),这意味着数据流中没有新的抖动产生。此时可以使用函数f(t)=e-ρt(ρ>0)对累积残差值进行逐步衰减直至0,以此消减抖动对数据流拟合的干扰。参数ρ决定了衰减的速度,图2所示的是使用衰减函数(ρ=0.1)对图1中STFT数据流进行线性拟合的结果。 图2 使用衰减函数的CUSUM算法拟合STFT数据流 从图2中可以看到,累积残差值发生了5次衰减(用d1~d5箭头标记),使图1中的拟合线段(箭头a标记)和包含300个样本点的缓存块区域没有出现。 (2)图2中的拟合线段(箭头b标记)没有因为使用了衰减函数而得到纠正。这是因为持续周期较长的抖动或者持续周期很短但是彼此间隔很小的若干个抖动限制了衰减函数的作用空间。也就是说,除了数据流的趋势变化外,抖动依然会造成累积残差值超过Th2。为了进行区分,对累积残差值从开始增长到超过阈值Th2所用的时间进行分析。 为了方便讨论,设当前拟合线段的方程为y=0,将一个长周期的抖动简化为一个长为D、宽为h的矩形波,则CUSUM算法检测到该抖动所用的时间Tl(Tl 同理,若干个相邻短周期的检测时间Ts为 式中f(t)为抖动对应的函数,满足0≤f(t)≤h。由中值定理可得f(ξ)Ts=Th2,f(ξ)为f(t)的均值,ξ∈[0,Ts]则可得Ts≥Tl。 设数据流上的某个趋势变化为直线y=ax,a (a>0)是斜率,则其检测时间Tv为 由上述分析可知,如果Tv>Tl,则说明导致累积残差值大于Th2的原因是由抖动造成的。反之则说明数据流上发生了明显的趋势变化,需要生成新的拟合线段。在图3中,虽然累积残差值在样本时间大约120处超过了Th2,但CUSUM算法检测到该变化所用的时间大于Tl,所以没有引起新的拟合操作。2 图3 改进后的CUSUM算法拟合STFT数据流 (3)在CUSUM算法中,阈值Th1和Th2一般是根据噪声的振幅来调整的,但是累积残差值还是会受到噪声持续时间的影响。阈值Th1为 式中med(a)和med(d)分别为一个采样窗口中STFT数据流上所有正常抖动的平均幅值和平均持续时间。理论上采样窗口越大越好,但在实际操作中肯定会受到时间和空间上的限制,但是必须大于其中z是Z(Z=1.96)置信水平,e是许可的误差。阈值Th2=φTh1,根据3σ准则,φ一般设为3或4。 上述改进既提高了CUSUM算法拟合STFT数据流的精度,也降低了其对计算资源的消耗。改进后CUSUM算法的伪代码如表1所示。 _表1 改进后CUSUM算法的伪代码 相关系数是一种衡量两个变量之间线性相关程度的指标,其定义为 图4(a)所示的是在无故障情况下发动机转速和进气量的数据流(已做归一化处理),用式(5)计算可得两者的相关系数为0.868 4。图4(b)是漏气故障发生时的转速和进气量数据流,对应的相关系数为-0.097 0。 从图4可以看到,转速和进气量数据流的局部趋势会被抖动干扰,所以需要讨论抖动对各数据流趋势间相关性的影响。 定理1.设两个数据流分别为X=x′+n1,Y=y′+n2,其中,x′和y′为X与Y的线性拟合线段,n1和n2分别为X与Y上的抖动部分,则有corr(X,Y)< corr(x′,y′)。 证明: 图4 无故障和漏气故障状态下的转速和进气量数据流 由E(n1)=E(n2)=0,可得 E((x′+n1-E(x′+n1))(y′+n2-E(y′+n2))=E((x′-E(x′)(y′-E(y′)) 又因为Cov(x′,n1)=0,可得 D(x′+n1)=D(x′)+D(n1)>D(x′) 同理可得 D(y′+n2)>D(y′) 则corr(X,Y) 由定理1可知,发动机数据流上的抖动会弱化变量间的关联性。为了更准确地获取数据流的相关性,先用CUSUM算法获取数据流的拟合线段,然后再用式(5)计算拟合线段间的相关系数,这样可以有效降低抖动的干扰。图5所示的是改进后CUSUM算法对图4中转速和进气量数据流的拟合结果。 图5 无故障和漏气故障状态下的转速和进气量数据流CUSUM算法拟合结果 对转速和进气量数据流的拟合线段进行相关性计算,得到无故障状态下两者的相关系数为0.934 6,漏气故障状态下两者的相关系数为-0.319 7。显然,基于CUSUM拟合线段的相关性结果能更准确地反映发动机数据流之间的相关性。 采用滑动时间窗对发动机数据流进行实时记录。用矩阵Um×n描述某个时间窗内的数据流,其中m是时间窗内数据流样本点的个数,n是数据流的维数。对U进行归一化后,其相关系数矩阵等于UTU。 定义统计量 当发动机发生故障时,数据流的相关性会发生明显改变,使得C值也随之产生明显突变,所以需要对数据流的相关性进行实时跟踪。根据定义可知计算C值的时间复杂度为O(mn2),为了降低其计算复杂度,尝试对C值的计算方法进行改进。 定理2.设有矩阵Um×n和n维随机向量 σ=[σ1,σ2,…,σn]′,其每个分量σj∈{-1,1}两两独立,σ在矩阵U第i行上的投影为 定义随机变量X 则有E(X)=C,D(X)≤2C2,其中E(X)和D(X)分别是X的期望与方差。 证明: 由于 且矩阵U的列向量被归一化为单位向量,则可得 结合式(7)可得 由于分量σj1,σj2,σl1,σl2中至少存在2个相互独立的量,即有E(σj1σj2σl1σl2)=0,则可证: 同理可证: 定理3.令有 P(|Y-C|≥λC)≤ε。 证明:对于随机变量Q,存在切比雪夫不等式: 式中Std(Q)为Q的标准差。 则可证 由定理3可知,在精度允许条件下可以用变量Y去估计数据流的相关性指标C。由上述讨论结果可知计算估计量Y只需要s1m次的加法和乘法以及s2lgs2次的比较运算,其总的时间复杂度为O(m),明显小于基于相关矩阵UTU来计算C值的时间复杂度O(mn2)。 基于STFT趋势和数据流相关性分析对汽油机发动机的空燃比故障进行在线识别。由于STFT数据流趋势的突变会因为闭环控制或者修正已经到达极限位置而逐步恢复到稳定状态,这在一定程度上会掩盖故障特征,因此在有效的时间范围内对故障进行分析很有必要。数据流的相关性分析在滑动时间窗上进行。设At和At+N为两个起始时间为t和t+N的相邻时间窗(两个时间窗宽度可以不等),Yi和Yj分别为时间窗At和At+N内数据流的相关性估计值。若|Yj-Yi|大于阈值Th3,则认为At+N时间窗内的数据流相关性发生了突变。 综上讨论,提出一种融合数据流趋势和相关性分析的空燃比故障检测方法(TAC)。该方法根据STFT趋势的异常变化来获取可能存在故障的时间范围,然后在对应的时间窗内对数据流相关性的变化情况进行分析,以此来判断故障是否发生。TAC算法的运行流程如图6所示。 图6 故障检测流程示意图 TAC算法的具体执行步骤如下。 第一步:使用改进后的CUSUM算法在线拟合发动机的相关数据流;并使用相关性估计算法对当前滑动时间窗内数据流拟合线段的相关性进行估计(STFT趋势无异常时时间窗宽度都相同)。 第二步:当STFT数据流的趋势出现异常(拟合线段斜率的绝对值或者相邻拟合线段之间的断点差值大于阈值Th4)时,开始记录此后产生的发动机数据流。 第三步:当STFT数据流的趋势重新恢复平稳(拟合线段斜率的绝对值小于阈值Th4)时,停止记录发动机数据流。 第四步:使用相关性估计算法获得所记录的异常数据流的相关值,并判断其相关性较之前一个时窗内是否发生突变,如果两者差值的绝对值大于阈值Th3,则认为检测到了空燃比故障。 5.1 实验环境 引起发动机空燃比故障的原因较多,本文中只讨论因进气系统漏气导致空燃比失衡的情况。正常情况下,发动机ECU根据空气流量传感器的检测值来计算喷油量,使空燃比始终稳定在理论值附近。而漏气故障会使实际进入气缸的空气质量大于空气流量传感器检测到的空气质量,造成空燃比值大于理论值。实验所用的1.5L Duratec发动机是自然吸气式,其常见的漏气部位有曲轴箱强制通风阀和进气总管。当发动机处于怠速和中小负荷工况时,节气门后方的真空度较大,所以当位于节气门体后方的曲轴箱强制通风阀发生漏气时会对空燃比造成明显影响。而当发动机在大负荷工况时,位于节气门前方的进气总管内的真空度较大,如果发生漏气同样会对空燃比造成影响。考虑到实验的安全性和简便性,人为设置了曲轴箱强制通风阀漏气故障(F_P)和进气总管漏气故障(F_I)。方法是在曲轴箱强制通风阀与进气歧管相连的软管和进气总管上各钻一个气孔(孔直径分别为3和4mm),在发动机运行时先用堵头堵住气孔,然后在某时刻拔出堵头即可造成突发漏气故障。 从实验车辆的OBD接口分别采集了发动机在各种工况下有无漏气故障时的数据流共220组,采样频率大约为25Hz,具体如表2所示。 表2 发动机数据流样本 每一组数据流包括转速、负荷、加速踏板位置、节气门位置、进气量、点火提前角和STFT。数据流的采集和分析程序均由C语言编写,运行于MC9S12XS128平台上,缓存的空间设为4KB。 5.2 实验结果 TAC算法的参数值设为:Th3=3,Th4=0.15,无故障状态下每个滑动时间窗口的宽度为50个样本点。相关性估计参数λ=2,ε=0.1。 图7~图9所示的是发动机在2 500r/min无故障工况下TAC算法的运行过程和结果。从图7中可以看到,STFT数据流的趋势在区间A[139,143]和B[144,163]内发生了异常,这意味着在上述区间内有发生故障的可能,需要进一步分析。图8所示的是CUSUM算法对相关数据流的拟合结果,在其基础上再进行数据流相关性的快速估计,结果如图9所示。 图7 STFT数据流趋势异常(无故障) 图8 发动机数据流及其CUSUM拟合结果(无故障) 从图9可知,异常区间A和B对应第3和第4个时间窗内数据流的相关性估计值分别为3.81和3.6,而第2个时间窗的估计值为3.55,这表明数据流的相关性并没有发生明显的变化,这意味着在区间A和B内发生的STFT数据流趋势异常不是由故障引起的。这与事实是相符的,因为发动机在中等负荷工作时会间歇性开启EGR阀来优化排放,从而引起空燃比发生短时间、小幅度的抖动。 图10~图12所示的是TAC算法在发动机处于1 500r/min稳定运行时突发进气总管漏气故障时的运行过程和结果。STFT数据流的斜率从样本时间556开始明显增加,直到样本时刻586才恢复平稳,如图10所示。图11所示的是相关发动机数据流及其CUSUM的拟合结果。 图10 STFT数据流趋势异常(漏气故障) 图9 各个时间窗的相关性估计值(无故障) 在异常区间[556,586]内对数据流拟合线段进行相关性估计的结果如图12所示。可以看到,第11个时间窗的估计值为6.63,而第12个时间窗的相关性估计值则仅为2.01,两者差值超过了阈值Th3。由此可知在12个时间窗内发生了空燃比故障。 为了验证TAC算法的有效性,对其在无故障状态下的误报率和有故障状态下的漏报率进行统计,并与基于SVM和3层神经网络的故障检测方法进行对比。将各个数据流在正常状态和故障状态下的趋势值作为SVM和神经网络的样本输入;SVM的核函数和神经网络的隐层均采用RBF;SVM和神经网络的结构参数通过遗传优化进行选取,以提高其识别效果。上述3种方法在220组数据流样本上的实验结果如表3所示。 图11 发动机数据流及其CUSUM拟合结果(漏气故障) 图12 各个时间窗的相关性估计值(漏气故障) 表3 故障检测实验结果% 可以看到,TAC的误报率明显低于SVM和神经网络,这主要是因为后两种方法没有考虑数据流的相关性。而3种方法的漏报率相差不大,这是因为故障发生时STFT数据流的趋势必定会发生突变。 本文中提出了一种能够对汽油机空燃比故障进行实时检测的TAC算法。该方法使用改进的CUSUM算法对发动机数据流进行趋势提取,通过降低抖动对拟合过程的影响,提高了CUSUM算法的拟合精度并减少了计算资源消耗。通过获取拟合线段的斜率变化来监控发动机空燃比是否正常,同时使用相关性估计算法来快速获取相关数据流之间的相关性指标。当STFT数据流的趋势发生异常时,通过比较相邻时间窗内数据流的相关性估计值来判断汽油发动机是否发生了空燃比故障。在1.5L Duratec发动机上进行进气系统的漏气故障检测试验,分别测试了在怠速、急加减速、1 500和2 500r/min稳定运行工况下TAC算法对F_P和F_I故障的检测效果。实验结果表明该方法比SVM和神经网络具有更低的误报率,这对故障检测系统的实用性具有积极的意义。 [1] Rolf Isermann.Model-based fault-detection and diagnosis-status and applications[J].Annual Reviews in Control,2005,29:71-85. [2] SALEHI R,et al.Detection and isolation of faults in the exhaust path of turbocharged automotive engines[J].International Journal of Automotive Technology,2015,16:127-138. [3] 周东华,刘洋,何潇.闭环系统故障诊断技术综述[J].自动化学报,2013,11(39):1933-1943. [4] TAYLOR J E,et al.Discerning the operational state of a vehicle’s distributed electronic systems from vehicle network traffic for use as a fault detection and diagnosis tool[J].International Journal of Automotive Technology,2014,15:441-449. [5] 李海涛,何玉珠,宋平.基于量子万有引力搜索的SVM自驾故障诊断[J].北京航空航天大学,2016,42(6):1093-1098. [6] 薄翠梅,柏杨进,杨海荣,等.基于改进的QBC和CS-SVM的故障检测[J].控制与决策,2012,27(10):1489-1493. [7] 刘景艳,王福忠,杨占山.基于RBF神经网络和自适应遗传算法的变压器故障诊断[J].武汉大学学报(工学版),2016,49 (1):88-93. [8] 欧璐,于德介.基于监督拉普拉斯分值和主元分析的滚动轴承故障诊断[J].机械工程学报,2014,50(5):88-94. [9] 胡志勇,牛家骅,郭丽娜,等.基于时域能量划分和PSO-SVM的发动机故障诊断[J].汽车工程,2016,38(1):86-90. [10] 胥永刚,孟志鹏,陆明,等.基于双树复小波和奇异差分谱的齿轮故障诊断研究[J].振动与冲击,2014,33(1):11-15. [11] Mano Ram Maurya,Praveen K Paritosh,Raghunathan Rengaswamy,et al.A frame work for on-line trend extraction and fault diagnosis [J].Engineering Applications of Artificial Intelligence,2010,23: 950-960. [12] Mano Ram Mauryaa,Raghunathan Rengaswamyb,Venkat Venkatasubramaniana.Fault diagnosis using dynamic trend analysis: A review and recent developments[J].Article in Engineering Applications of Artificial Intelligence,2007,20(2):133-146. [13] 刘敏华,萧德云.基于趋势分析和SDG模型的故障诊断[J].控制理论与应用,2006,23(2):306-310. [14] 杨元,黎放,刘振宇,等.基于相关性的系统预防性维修任务成组优化[J].武汉大学学报(工学版),2012,45(4):539-544. [15] ROSS-Tech,LLC.Fuel trim info[EB/OL].http://wiki.rosstech.com/wiki/index.php/Fuel_Trim_Info.2006-05-08. [16] Hillol Kargupta,Vasundhara Puttagunta,Martin Klein,et al.Onboard vehicle data stream monitoring using mine fleet and fast resource constrained monitoring of correlation matrices[J].New Generation Computing,2006,25(1):5-32. [17] KEOGH E,CHAKRABARTI K,PAZZANIM,et al.Dimensionality reduction for fast similarity search in large time series databases[J].Know l Inf Syst,2001,3(3):263-286. [18] CHARBONNIER S,BECQ G,BIOT L.On line segmentation algorithm for continuously monitored data in Intensive Care Units [J].IEEE Trans.Biomed.Eng,2004,51:484-492. [19] CHARBONNIER S.On line extraction of temporal episodes from ICU high frequency data:A visual support for signal interpretation [J].Computer Methods and Programs in Biomedicine,2005,78: 115-132. 中国汽车零部件产学研协同创新论坛暨科技资源共享平台启动工作会圆满结束 “2017国际汽车关键技术论坛2017 International Auto Key Tech Forum”产学研分论坛4月21日于上海车展期间成功举办,近20所高校汽车院系代表、部分汽车零部件企业代表和多省市科学技术协会代表参加了本次论坛。 本次论坛聚焦产学研协同创新,整合行业创新要素,打造科技资源共享平台,为产业研发和创新提供支撑体系,助推零部件企业转型升级。 A Real-time Fault Detection Method for the Air-fuel Ratio of Gasoline Engine Based on the Trend and Correlation Analysis of Dataflow Wu Shili1,Tang Zhenmin1&Chen Chengyong2 According to the features of air fuel ratio fault in gasoline engine,a real-time fault detection method based on the abnormality of data flow trend and correlation analysis is proposed in this paper.For enhancing accuracy and operation efficiency,modifications are made based on the algorithm of cumulative sum of error,with rapid estimation on the correlation between data flows,to enable the whole system operates on on-board platform relatively sensitive to resources.The results of test on the engine of Chang-an vehicle show that compared with traditional fault detection method based on support vector machine and neural network,the method proposed can obtain better results of fault detection with lower resource consumption. gasoline engine;air fuel ratio fault;real-time fault detection;data flow trend;CUSUM algorithm;correlation 10.19562/j.chinasae.qcgc.2017.04.015 ∗国家自然科学基金(61305134)和博士点基金(20133219120035)资助。 原稿收到日期为2016年9月19日。 唐振民,教授,博士生导师,E-mail:tzm.cs@mail.njust.edu.cn。








2 数据流相关性



3 相关性估计算法











4 故障检测算法
5 实验





6 结论
1.Department of Science and Engineering,Nanjing University of Science and Technology,Nanjing 210094;2.Nanjing Vocational Institute of Transport Technology-Chang'an Ford Lab,Nanjing 211188
