滚动阻力对车辆运动稳定性的影响分析∗
2017-05-12施树明王宪彬张向东
李 玲,施树明,王宪彬,张向东
(1.吉林大学交通学院,长春 130022; 2.东北林业大学交通学院,哈尔滨 150040)
滚动阻力对车辆运动稳定性的影响分析∗
李 玲1,施树明1,王宪彬2,张向东1
(1.吉林大学交通学院,长春 130022; 2.东北林业大学交通学院,哈尔滨 150040)
鉴于传统的以经典线性2自由度模型为基础的多自由度非线性车辆系统模型中通常忽略轮胎滚动阻力的影响而难以反映车辆运动的真实状态,本文中在发动机制动工况下,建立计及轮胎滚动阻力的5自由度(纵向速度、侧向速度、横摆角速度和前后轮转动速度)车辆模型,利用非线性系统的全局相平面和状态变量时间序列等分析方法研究了滚动阻力对高速转向行驶车辆动力学特征的影响。仿真结果表明,在发动机制动工况下,车速逐渐降低的过程中,滚动阻力严重影响车辆系统的运动状态。因此,建立包含滚动阻力的车辆模型有利于分析汽车的操纵稳定性特征,为实验验证理论模型的正确性提供理论支持。
操纵稳定性;轮胎滚动阻力;车辆动力学;失稳运动
前言
高速行驶的车辆,为避让障碍物,在紧急转向过程中,利用发动机进行减速制动时,会引起车辆系统的失稳运动[1]。利用现有的车辆模型[2],在发动机制动工况下,对高速转向车辆失稳运动进行仿真分析时发现,车辆系统在失稳后的很长时间内不能停止运动。但前期的模型车实验研究表明,在发动机制动工况下,无论车辆是否失稳,高速转向车辆在一定时间内都能够很快停止运动。这种理论与实际实验的差异性说明,现有的车辆操纵稳定性分析模型不能准确地描述发动机制动工况下车辆系统的动力学特征,还存在被忽略的重要影响因素。初步分析认为,这种差异性是由于车辆模型中没有考虑轮胎滚动阻力的影响。
目前,在车辆模型建立方面,以2自由度汽车动力学模型为基础的汽车转向稳定性研究已经取得较丰硕的研究成果[3-5]。文献[6]中利用2自由度汽车模型和非线性轮胎模型分析了汽车在转弯过程中的稳态动力学分岔特征。文献[7]中为评价汽车安全辅助驾驶系统的有效性,将纵向速度作为一个自由度引入到模型中,提出了一种基于3自由度模型驾驶稳定区域的计算方法。文献[2]中在3自由度模型的基础上,引入驱动建立了车辆系统5自由度模型,揭示了驱动对汽车操纵稳定性的影响。这些车辆操纵稳定性模型都关注于高速时车辆的运动状态,没有考虑轮胎滚动阻力的影响。但是在车速逐渐降低的过程中,轮胎滚动阻力对车辆系统运动特征的影响很大,不可忽略。
轮胎在路面上滚动时,滚动阻力使机械能转变为热能。事实上,轮胎消耗了发动机传递给车轮的部分能量,利用剩余的能量驱动车辆前进[8]。目前,滚动阻力在纵向车辆动力学中已经得到比较完善的研究和表达。文献[9]和文献[10]中指出,作用于车辆系统的外力包括轮胎力、滚动阻力和空气阻力。汽车除了克服来自空气的阻力之外,还必须克服来自地面的滚动阻力。滚动阻力的引入是由于轮胎变形产生的迟滞损失[11]。作用在驱动轮上的转矩必须克服滚动阻力矩的作用,剩余部分才能用于形成轮胎与路面之间的作用力[12-13]。但车辆操纵稳定性非线性动力学研究中,在分析车辆系统动力学特征时通常忽略滚动阻力的影响。
文献[14]和文献[15]中在提出魔术公式时指出,为允许曲线相对于原点(x-o-y)有一个偏移量,引入两个移动因子Sh和Sv,滚动阻力使轮胎力的偏移量增加,即考虑滚动阻力的魔术公式曲线坐标系为X-o-Y。但通常使用的魔术公式中不考虑滚动阻力的影响,直接采用x-o-y坐标系中过原点的曲线计算轮胎力。文献[12]中在描述地面附着率时给出了附着率的表达式,同时强调车辆在道路上运行时,滚动阻力总是很小,可以忽略不计,从而得到不考虑滚动阻力的附着率和滑移率曲线。但根据文献[16]中关于风阻和滚动阻力的比重图描述中可以看到,在车速逐渐降低的过程中滚动阻力比重逐渐增大,最高可达到80%以上,因此,在研究低速运动状态时,滚动阻力是一个不可或缺的因素。
本文中在所建立的针对发动机制动工况的车辆系统5自由度非线性模型的基础上,引入滚动阻力,建立包含滚动阻力的车辆系统5自由度非线性模型,利用相平面和状态变量时间序列等方法,分析高速转弯行驶车辆在发动机制动作用下减速的过程中,轮胎滚动阻力对系统动力学特征的影响。
1 建立车辆系统模型
高速行驶的车辆在转弯时,针对利用发动机制动使车辆减速转弯的情况,基于发动机制动工况下的5自由度平面运动非线性车辆系统方程[17],在对该工况下的滚动阻力进行具体分析的基础上,建立发动机制动下包含滚动阻力的5自由度非线性车辆模型。
1.1 包含滚动阻力的车辆系统模型
在已有的针对发动机制动工况的5自由度车辆系统模型的基础上,引入前后轮轮胎滚动阻力,建立考虑滚动阻力的车辆系统模型。
1.1.1 滚动阻力的计算
当轮胎在路面上转动时,与路面接触的轮胎圆周部分产生变形。消耗在变形上的一部分能量在轮胎恢复变形的过程中将无法恢复。因此,在接触区域内压力分布的变化使得印迹前端的应力比后端更高。该过程中能量的消耗和压力变形产生滚动阻力,该力的方向与轮胎运动方向相反且与轮胎印迹内的载荷成正比[18]:

式中:ωw为车轮角速度;Fz为轮胎垂直载荷;μr为滚动摩擦因数。μr不是恒定的,它主要依赖于轮胎的速度、充气压力、侧偏角及外倾角。它也取决于机械性能、速度、磨损、温度、负载、尺寸及道路状况。本文中取μr=0.015+7×10-6v2,v为车速[19]。
由式(1)可计算得到作用在前后轮上的滚动阻力Frf和Frr:

式中:m为整车质量;ωf为前轮角速度;ωr为后轮角速度;lf为前轴距;lr为后轴距。
当前轮转动时,会在轮胎上产生一个侧偏角,图1所示为作用于前轮的滚动阻力分析图。为建立考虑滚动阻力的整车5自由度非线性模型,需要将轮胎上的滚动阻力沿轮胎纵向和侧向即沿x-y轴分解,故如图1所示,将前轮滚动阻力分解为沿x方向的轮胎纵向滚阻Frfcos(-αf)和沿y轴方向的轮胎侧向滚阻Frfsin(-αf)。这里轮胎侧偏角取负号是由于魔术公式中规定的轮胎侧偏角正方向与轮胎侧偏角实际作用的正方向相反。
1.1.2 滚动阻力的施加方式
当车轮侧偏时,在轮胎的纵向和侧向同时作用有滚动阻力。驱动力矩必须克服滚动阻力,剩余部分才用于车辆前进运动[12]。即轮胎必须首先克服滚动阻力产生的迟滞损失,才能进一步形成轮胎与路面之间的作用力。因此,本文中纵向滚动阻力以滚动阻力矩的方式施加给前后轮,侧向滚动阻力直接施加在车轮侧向。
图2为前轮轮胎转动动力学分析图,结合图1可得前轮滚动阻力矩Txf为其中,轮胎与路面间产生的作用力Fbf为

图1 前轮滚动阻力分析图


同理可得后轮滚动阻力矩Txr为

前后轮侧向滚动阻力Fryf和Fryr为

式中:Re为车轮转动半径;αf和αr为前后轮侧偏角。1.1.3 考虑滚动阻力的车辆系统模型
根据1.1.2节对前后轮滚动阻力的分析,采用图3所示的考虑滚动阻力的单轨车辆模型,与文献[17]中不包含滚动阻力的车辆模型相比,该模型一方面在前后轮轮胎纵向施加滚动阻力矩(如图2),另一方面在前后轮轮胎侧向施加侧向滚动阻力。因此,建立包含滚动阻力的前轮转向车辆系统5自由度非线性模型:
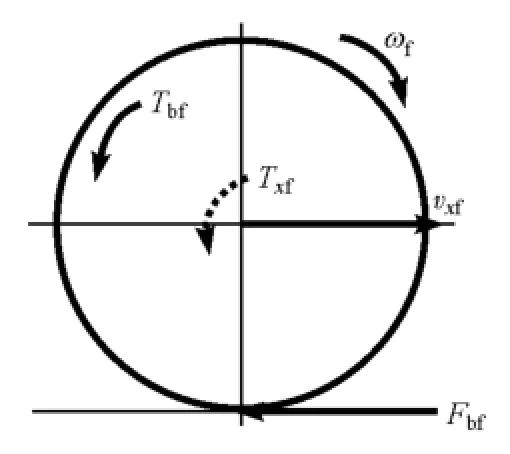
图2 前轮转动动力学分析

式中:Iz为绕z轴的转动惯量;vx为纵向速度;vy为侧向速度;γ为横摆角速度;J为车轮转动惯量;δf为前轮转角;Cair_x和Cair_y为纵向和侧向风阻系数;AL_x和AL_y为纵向和侧向迎风面积;ρ为空气密度;Tbf和Tbr为前后轮制动力矩;Flf,Flr,Fsf和Fsr为前后轮纵向和侧向轮胎力。具体的车辆参数见表1。
1.2 轮胎模型
稳态轮胎力的计算方法采用经典的魔术公式[20]:

图3 考虑滚动阻力的单轨车辆模型

表1 汽车参数
F=Dsin(Carctan(Bx-E(Bx-arctanBx)))(8)式中:B,C,D和E为参数,参数值见表2;F为轮胎纵向力或侧向力;x为轮胎滑移率或侧偏角。
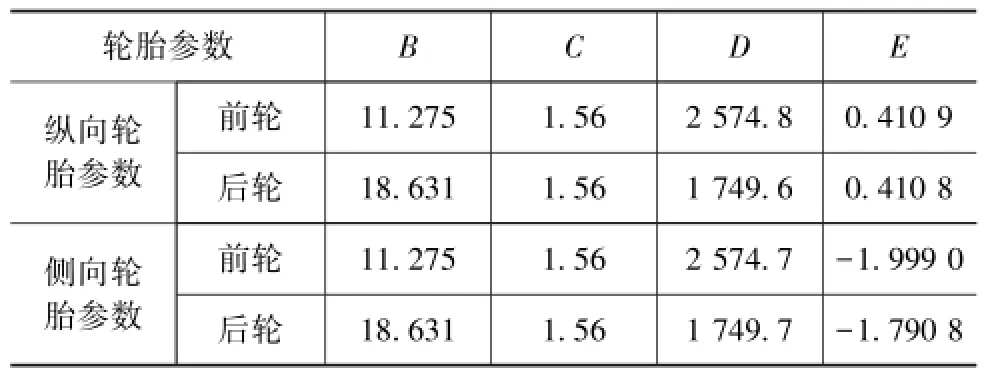
表2 纵向与侧向轮胎力参数
为便于计算机分析,滑移率方程为

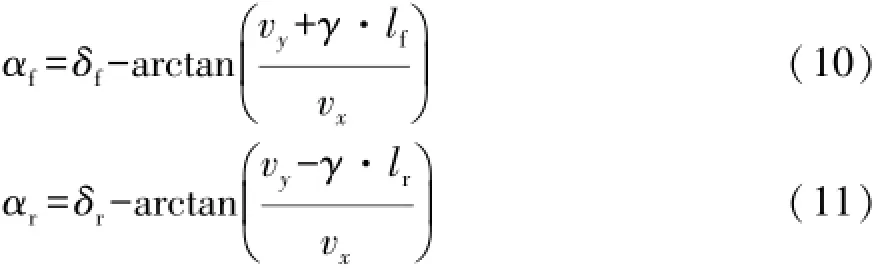
前后轮的轮胎侧偏角的表达式分别为
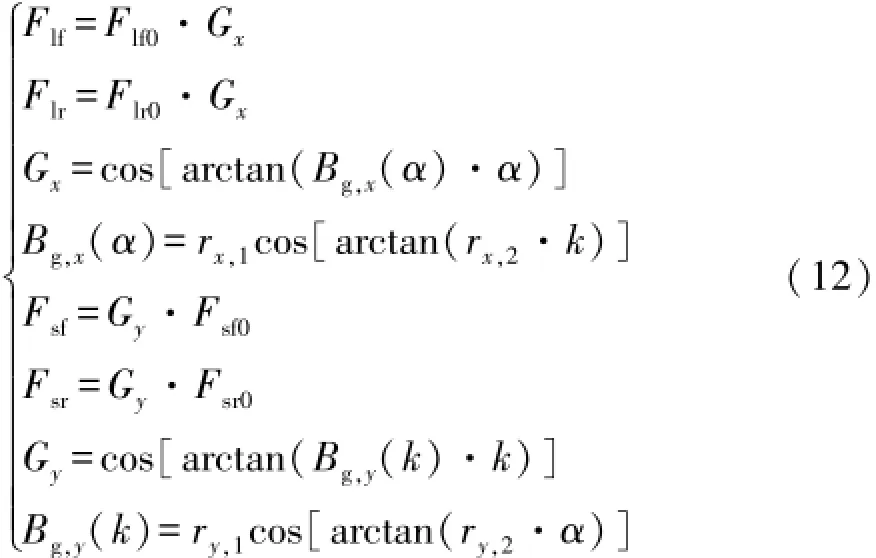
对于轮胎混合滑移,采用Pacejka提出的模型进行分析,具体计算公式为x式中:vwx为轮心处的纵向速度;后轮转角δr=0;Flf0,Flr0,Fsf0和Fsr0为稳态下前后车轮纵向力和侧向力,其大小可以用式(8)计算;Gx和Gy为轮胎力混合滑移修正函数;rx,1,rx,2,ry,1和ry,2为轮胎力混合滑移修正系数,见表3。
表3 混合滑移系数
1.3 车辆系统输入
车辆系统的输入量包括车轮转角和反拖力矩。本文中车辆系统为前轮驱动前轮转向系统,前轮转角的输入采用正弦输入形式:

式中:A为前轮转角幅值;f为前轮转角变化的频率。
根据经验公式,采用等距取点拟合的方法,得到发动机制动工况下,作用在驱动轮上的制动力矩的拟合计算式[17]:

1.4 空气阻力
模型中引入符号函数(sgn)来描述空气阻力。在汽车失稳过程中,行驶方向有前后左右多种情况,空气阻力的方向始终与行驶方向相反,所以要获得速度的符号,并通过负号给车辆施加与行驶方向相反的空气阻力。
2 车辆系统模型的仿真分析
由于在发动机制动工况下开展车辆高速转向实验,危险性较大,本文中采用数值仿真分析方法对是否考虑滚动阻力的车辆模型进行仿真验证,对比分析滚动阻力对车辆系统运动特征的影响。
2.1 不考虑滚动阻力的车辆系统仿真
取前轮转角变化的频率f=0.4Hz,幅值A=0.04,单初值点的侧向速度vy=0,横摆角速度ω=0,纵向初速度vx=20m/s。在发动机制动工况下,采用不包含滚动阻力的车辆模型进行仿真分析。图4~图7为车辆系统模型仿真200s的时间内得到的结果。
图4为系统状态变量vx-vy-γ相空间内的相轨迹,图5为图4在vy-ω平面的投影。通过相轨迹曲线可以看出,在整个仿真周期内,纵向速度vx由初始值开始经历4次大幅度变化后逐渐减小;侧向速度vy和横摆角速度ω的绝对值由初始值开始经历4次剧烈变化后,在小范围内波动。各状态变量出现显著的不规则变化,即车辆系统出现失稳运动,并在失稳后逐渐趋于静止。
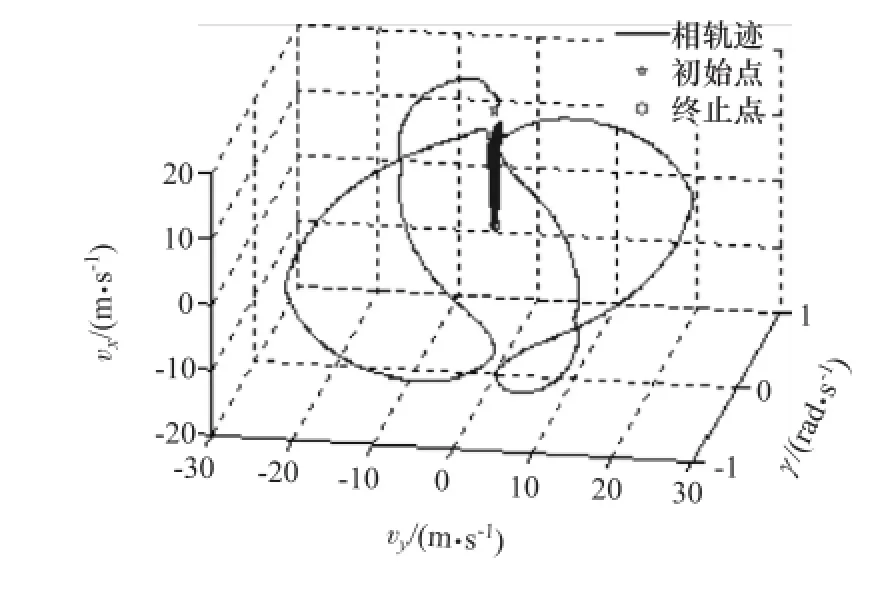
图4 vx-vy-γ系统相空间特性
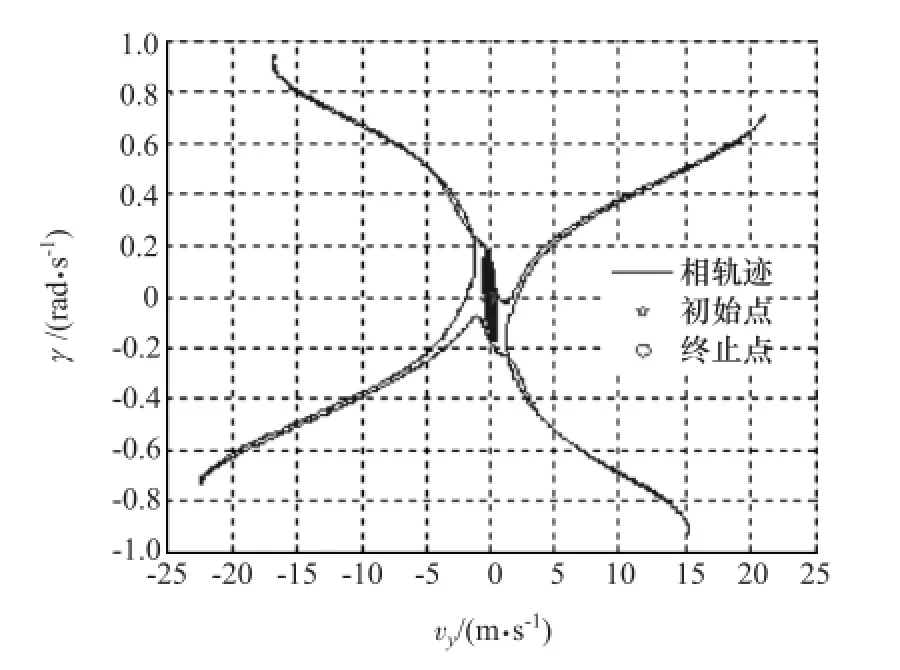
图5 系统相空间轨迹在vy-γ平面的投影
图6 为作用在驱动轮上的制动力矩与转速的数值计算结果。由图可见,在仿真终止时驱动轮上的转速与制动力矩都没有达到零点。图7为车辆系统的状态变量时间序列图。由图可见,仿真200s的时间内,系统横摆角速度始终在小范围内波动,纵向速度没有达到零点。
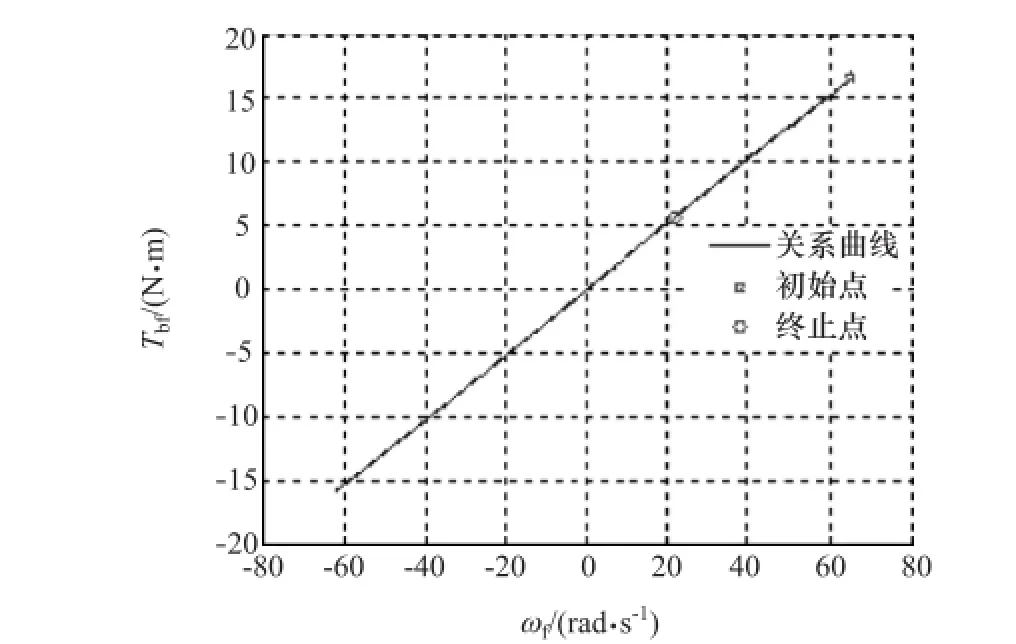
图6 Tbf-ωf关系曲线图
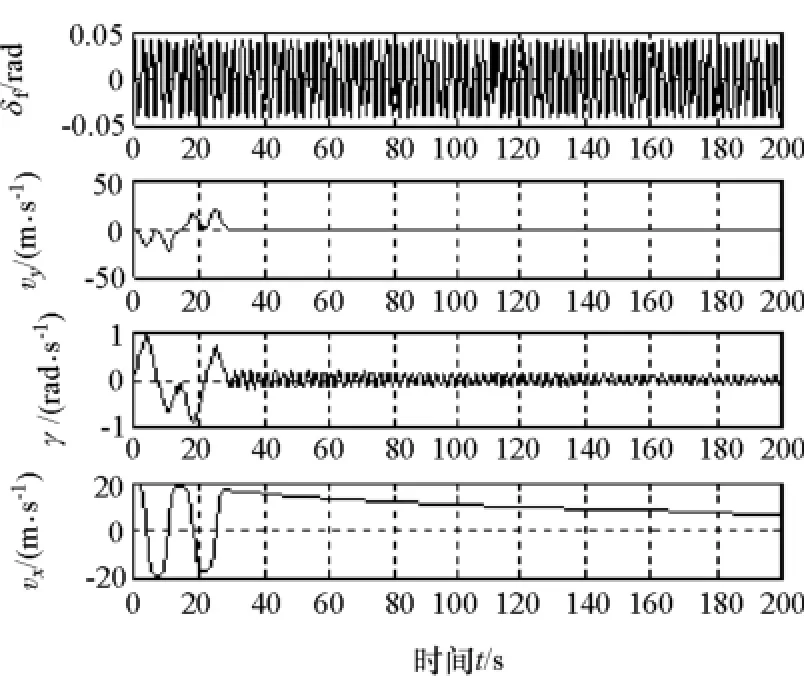
图7 系统前轮转角和状态变量时间序列
结合实际驾驶经验,高速行驶车辆在转弯过程中,若只利用发动机制动实现汽车减速转向,由于车辆系统为一个耗散系统,经过一段时间后系统能量最终耗尽,汽车停止运动,即系统状态变量均为零。前期的模型车试验也表明,在该工况下高速转向运动的车辆系统能够在短时间内停止运动。因此,上述仿真结果不符合实际驾驶经验。
2.2 考虑滚动阻力的车辆系统仿真
在与上述仿真初始条件相同的情况下,将滚动阻力加入车辆模型,采用与上述相同的方法进行仿真分析,仿真时间设定为100s。
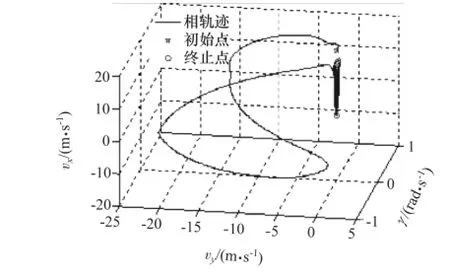
图8 vx-vy-γ系统相空间特性
图8 为系统状态变量vx-vy-γ相空间内的相轨迹,图9为图8在vy-γ平面的投影。整个仿真周期显示,各个状态变量在经历两次大幅度变化后逐渐减小到零点。图10为作用在驱动轮上的制动力矩与转速的数值计算结果,仿真终止时制动力矩和转速都到达零点。图11为系统状态变量时间序列图。由图可见,仿真时间在接近100s时系统各个状态变量达到零点,系统停止运动。这一结果表明,在发动机制动工况下,车辆系统最终停止运动,与上述不考虑滚动阻力的仿真结果相比,更符合实际情况。由此证明,不考虑滚动阻力的车辆系统模型是不完善的。
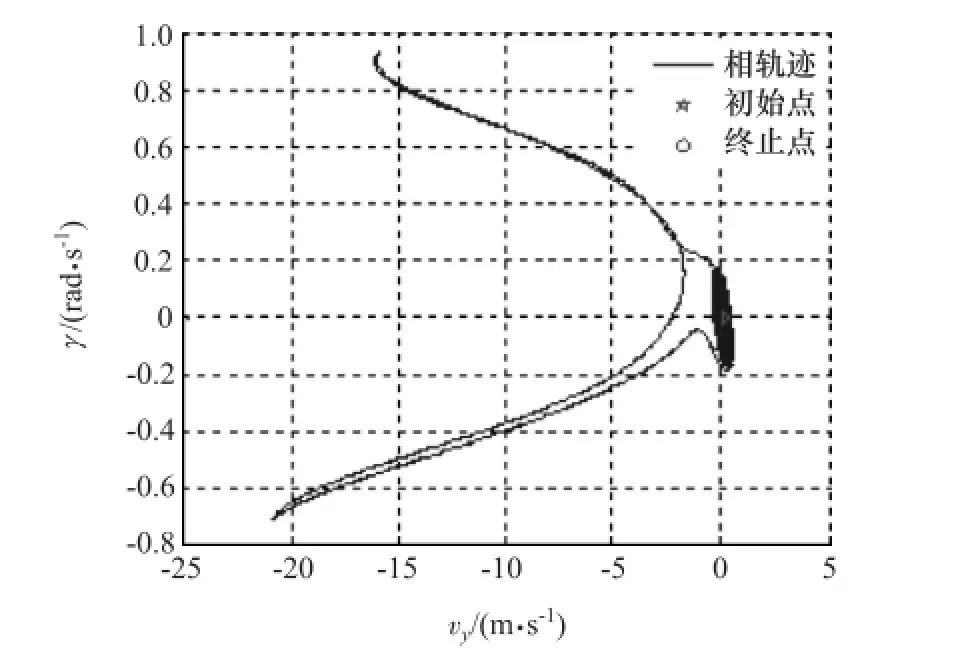
图9 系统相空间轨迹在vy-γ平面的投影
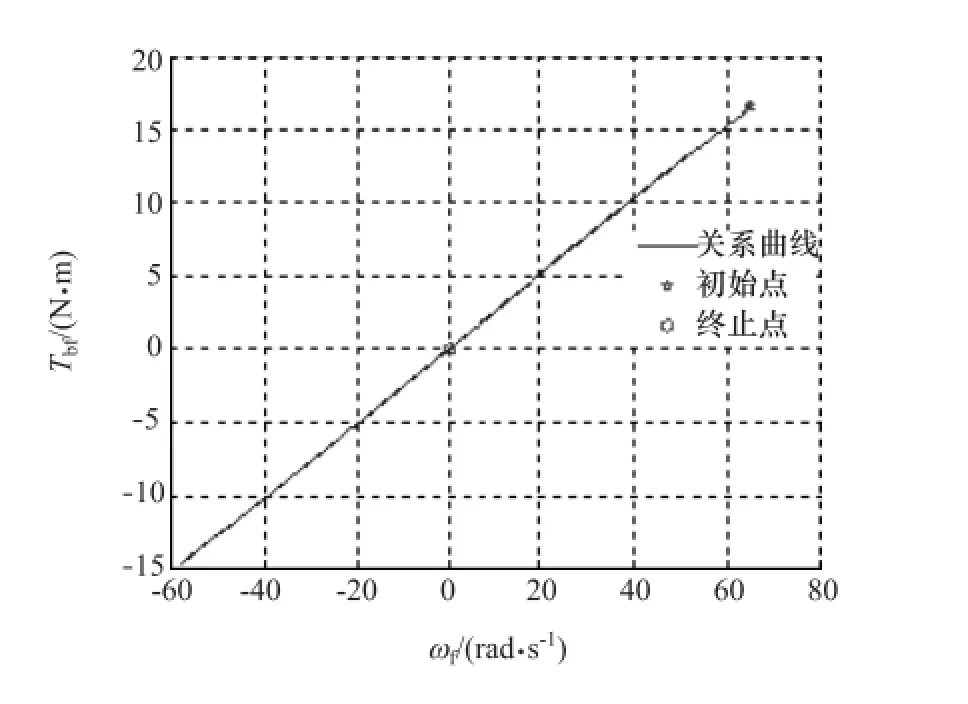
图10 Tbf-ωf关系曲线图

图11 系统前轮转角和状态变量时间序列
2.3 滚动阻力对车辆系统运动特征的影响分析
将2.1节和2.2节中车辆系统3个状态变量的前100s仿真数据进行对比分析。如图12~图15所示,分别为不考虑滚阻和考虑滚阻时,车辆系统纵向速度时间序列图、侧向速度时间序列图、图13的局部放大图和横摆角速度时间序列图。

图12 纵向速度时间序列图

图13 侧向速度时间序列图

图14 图13的局部放大图
(1)在0-15s的仿真时间内,滚动阻力对车辆系统的纵向速度、侧向速度和横摆角速度的影响不明显,在该时间段内车辆3个状态变量大幅度变化,系统出现失稳运动现象。与不考虑滚动阻力的车辆模型仿真结果类似。
(2)在15-35s的仿真时间内,与不考虑滚动阻力的车辆模型仿真结果相比,滚动阻力对车辆系统的运动特征影响非常显著:不考虑滚动阻力的车辆系统的3个状态变量仍大幅度变化,而考虑滚动阻力的系统纵向速度从vx=15m/s附近逐渐减小,侧向速度开始在零附近波动,横摆角速度在±0.2rad/s的范围内波动。
(3)在仿真时间接近100s时,不考虑滚动阻力的车辆系统的纵向速度降至11m/s附近,侧向速度在±0.15m/s范围内波动,横摆角速度在零附近波动;考虑滚动阻力的车辆系统的3个状态变量值都为零,系统停止运动。

图15 横摆角速度时间序列图
3 结论
本文中研究结果表明,在建立针对发动机制动工况的车辆系统模型,分析发动机制动工况下车辆系统的动力学特征时,滚动阻力是一个重要因素。考虑滚动阻力的车辆模型仿真结果显示,与不考虑滚动阻力的情况相比,滚动阻力不会改变高速时车辆系统的失稳运动特征。但在发动机制动作用下车速逐渐降低的过程中,考虑滚动阻力的车辆系统运动状态变化显著。同时,滚动阻力严重影响车辆系统的停止运动时间。建立包含滚动阻力的车辆模型更符合实际,可以为研究发动机制动工况下车辆系统的操纵稳定性提供理论基础,也为后续的试验验证工作提供了更加准确的仿真模型。
[1] BEYER K,KRUEGER E,SONNENBERG M.Enhanced vehicle stability with engine drag control[C].SAE Paper 2002-01-1217.
[2] WANG Xianbin,SHI Shuming,LIU Li,et al.Analysis of driving mode effect on vehicle stability[J].International Journal of Automotive Technology,2013,14(3):363-373.
[3] INAGAKI S,KSHIRO I,YAMAMOTO M.Analysis of vehicle stability in critical cornering using phase plane method[C].SAE Paper 943841.
[4] YOUNG Eun Ko,LEE Jang Moo.Estimation of the stability region of a vehicle in plane motion using a topological approach[J].Int.J. of Vehicle Design,2002,30(3):181-192.
[5] SOBHAN Sadri,WU Christine.Stability analysis of a nonlinear vehicle model in plane motion using the concept of Lyapunov exponents[J].Vehicle System Dynamics,2013,51(6):906-924.
[6] DELLA Rossa F,MASTINU G,PICCARDI C.Bifurcation analysis of an automobile model negotiating a curve[J].Vehicle System Dynamics,2012,50(10):1539-1562.
[7] SHINICHIRO Horiuchi.Evaluation of chassis control method through optimisation-based controllability region computation[J].Vehicle System Dynamics,2012,50,Supplement:19-31.
[8] ALAN N Gent,JOSEPH D Walter.The pneumatic tire[M].U.S. Department of Transportation:The National Highway Traffic Safety Administration,2006.
[9] RAJAMANI R.Vehicle dynamics and control[M].Springer Science&Business Media,2011.
[10] GILLESPIE T D,赵六奇,金达锋.车辆动力学基础[M].北京:清华大学出版社,2006.
[11] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[12] 米奇克,瓦伦托维茨.汽车动力学[M].陈荫三,余强,译.北京:清华大学出版社,2009.
[13] 庄继德.汽车轮胎学[M].北京:北京理工大学出版社,1996.
[14] PACEJKA H.Tire and vehicle dynamics[M].Elsevier,2005.
[15] PACEJKA H B,BAKKER E.The magic formula tyre model[J]. Vehicle system dynamics,1992,21(S1):1-18.
[16] WOLF-HEINRICH H,AHMED S R.Aerodynamics of road vehicles:from fluid mechanics to vehicle engineering[M].Elsevier,2013.
[17] 李玲,施树明,王玉琼.发动机制动影响高速转向车辆稳定性的仿真分析[C].2015中国汽车工程学会年会论文集(Volume3),2015.
[18] GENTA G,MORELLO L.Steering system[J].The Automotive Chassis:Vol.1:Components Design,2009:239-268.
[19] JAZAR R N.Vehicle dynamics:theory and application[M].Springer Science&Business Media,2013.
[20] PACEJKA H B.Tyre and vehicle dynamic[M].Oxford:Elsevier,2006.
Analyses on the Effects of Rolling Resistance on the Motion Stability of Vehicle
Li Ling1,Shi Shuming1,Wang Xianbin2&Zhang Xiangdong1
1.Traffic College,Jilin University,Changchun 130022; 2.Traffic College,Northeast Forestry University,Harbin 150040
In view of that traditional multi-DOF nonlinear vehicle model based on classic 2 DOF linear vehicle model usually neglects the effects of wheel rolling resistance,leading to inadequacy in reflecting real states of vehicle motion,a 5 DOF(longitudinal velocity,lateral velocity,yaw rate and the rotational velocities of front and rear wheels)nonlinear dynamics vehicle model under engine braking condition with consideration of wheel rolling resistance is established in this paper.The effects of rolling resistance on the dynamics features of vehicle in highspeed cornering are studied by using analysis methods of globe phase plane and state variables time sequence for nonlinear system.Simulation results show that in the course of gradual reduce in vehicle speed under engine braking condition,rolling resistance has significant impact on vehicle motion states.Therefore,vehicle model containing rolling resistance is conducive to the analysis on the handling and stability characteristics of vehicle,providing theoretical supports for the test verification on the correctness of theoretical model.
handling stability;tire rolling resistance;vehicle dynamics;unstable motion
10.19562/j.chinasae.qcgc.2017.04.012
∗国家自然科学基金(51475199)、中央高校基本科研业务费专项资金项目(2572015CB15)和黑龙江省自然科学基金(E2015052)资助。
原稿收到日期为2016年3月28日,修改稿收到日期为2016年5月27日。
施树明,教授,E-mail:shishuming@jlu.edu.cn。
