修正模糊控制器在双A臂悬架联合仿真的应用研究
2017-05-09王孝鹏
王孝鹏
(三明学院机电工程学院,福建三明365004)
修正模糊控制器在双A臂悬架联合仿真的应用研究
王孝鹏
(三明学院机电工程学院,福建三明365004)
用ADAMS软件建立双A臂悬架多体动力学模型,计算簧载质量速度及其变化率作为主动悬架控制的输出量;半主动悬架采用带修正因子的模糊控制器,用加权系数分别控制簧载质量速度与加速度所占模糊控制器输入的比重,其中加权系数采用簧载质量速度进行修正调节;在MATLAB搭建悬架系统联合仿真模型,计算结果表明:带修正因子的模糊控制器在各不同车速阶段对改善悬架的总体性能有明显作用,车身垂直加速度在低频阶段改善突出,提升整车在不同车速范围内乘坐舒适特性。
双A臂悬架;路面模型;修正因子;联合仿真
双A臂悬架多体模型能够较好的反映悬架的真实运动机理,采用多体模型与控制策略研究主动悬架系统是一种新型方法。车辆在行驶过程中,整车的平顺性与操纵稳定性取决于悬架系统特性的调教。悬架是车身与车轮之间的传力装置,在整车的行驶过程中只有在特定的行驶条件下,被动悬架状态才能达到最优状态,当路面的条件或者行驶的速度发生变化,悬架的最优状态会发生破坏,因此被动悬架的设计只能采取折中的方法进行解决。半主动悬架的核心是采用不同的控制策略对减震器的阻尼特性进行调节。纯模糊控制系统具有不依赖系统的数模模型,鲁棒性好,容错能力强等优点,但具有一定的稳态误差。半主动悬架是近些年相关文献研究的一个趋势,相对于主动悬架,主要通过改变减震器的可变力输出来控制整车的震动特性,其性能与主动悬架接近。相比主动悬架,其结构简单,能耗小[1-5]。通过建立双A臂主动悬架联合仿真模型,采用修正模糊控制器对1/4整车模型进行仿真研究并与被动悬架的性能进行对比。
1 双A臂悬架模型
双A臂悬架多体动力模型的建立是联合仿真的前提工作,其建模精度直接导致仿真结果与真实实验的差距。
1.1 悬架模型
基于联合仿真的大多文献在模型建立存在如下问题:1)采用弹簧质量系统模拟悬架运动特征,此模型能较好的反映悬架的垂直震动特性,但不能反映悬架的实际运行状态且忽略了车轮的侧性运动;2)悬架的下控制臂与转向横拉杆与地面进行相互约束,弹簧减震器直接与车身或地面直接连接;正确应为与车身进行约束,在车身与弹簧减震器之间添加无质量的虚部件,此模型虽然具有悬架模型的多体形式,且能反映悬架的K&C特性,但车身与车轮之间相对(悬架动行程)与真情况不符;通过ADAMS软件建立双A臂悬架模型,同时在减震器上下安装点之间建立主动力函数,在测试试验台建立路面输入函数模拟B级路面不同车速段的输入;将实验测得的磁流变液阻尼器特性曲线输入到双A臂悬架中,建立好的麦弗逊悬架模型主视与侧视图如图1所示。
建立车身速度、加速度、悬架动行程及车轮侧向滑移量状态输出函数如下:
VY(.double_wishbone.body.cm);
ACCY(.double_wishbone.body.cm);
DY(.double_wishbone.body.cm,.double_wishbone.knuckle.
MARKER_40)-343.6;
DZ(.double_wishbone.knuckle.MARKER_84,.double_
wishbone.
test_patch.cm)。
建立悬架主动力、路面状态输入函数如下:
VARVAL(.double_wishbone.LUMIAN_SHURU);
VARVAL(.double_wishbone.ZHUDONGLI_SHURU)。

图1 双A臂主动悬架模型Figure 1 Doublewishbone Active Suspension Model
2 路面模型
对悬架性能分析时需要输入路面模型。根据国家标准将公路等级分为8种,在不同的路段测量,很难得到两个完全相同的路面轮廓曲线。通常是把测量得到的大量路面不平度随机数据,经数据处理得到路面功率谱密度。产生随机路面不平度时间轮廓有两种方法,由白噪声通过一个积分器产生或者由白噪声通过一个成型滤波器产生。路面时域模型可用如下公式(1)描述;根据公式建立B级路面不同车速的仿真模型如图2所示,B级路面不同车速的垂直位移计算结果如图3所示。

式中:q(t)为路面随激励;w(t)为积分白噪声;f0为时间频率;Gq为路面不平度系数;V为汽车行驶速度。

图2 B级路面不同车速时域仿真模型Figure 2 Class B road different speed time-domain simulationmodels
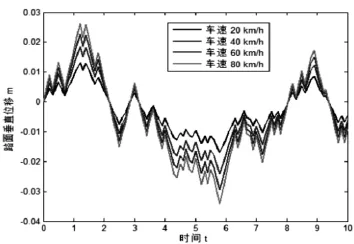
图3 B级路面各车速垂向位移Figure 3 Class B road different speed vertical displacement
3 控制器设计
模糊控制规则是模糊控制器的核心,它用语言的方式描述了控制器输入量与输出量及修正因子k之间的关系。悬架的输入输出分别采用7个语言变量规则来进行描述:负大(-3)、负中(-2)、负小(-1)、零(0),正小(1)、正中(2)、正大(3).修正因子k采取4个语言模糊集来进行描述:零(0),正小(1)、正中(2)、正大(3)。
采用带修正因子的模糊控制器对主动控制力U进行控制。在控制过程中,以车身的速度V与期望值的误差及其变化率作为模糊控制器的输入量、用修正因子k控制簧载质量的速度与加速度的输入的权重,用公式2所示;其中修正因子k的大小由簧载质量的速度进行在线实时调节。

通过对k值的调节,可以控制簧载质量的速度与加速度对输出控制力U的加权程度。在初始状态,系统的误差比较大,控制的主要目标是消除误差,因此误差E的权重k应取较大值;当系统的趋于稳定时,系统本身误差已经减小,此时控制系统的主要控制目标是减小超调量,使系统尽快稳定,此时取k为较小值。在不同的误差控制范围取不同的加权因子k,以实现控制规则在线实时调整。修正因子k的模糊控制规则如表1所示。

表1 修正因子k模糊控制规则Table 1 Correction factor k fuzzy control rules
簧载质量的速度、加速度的基本论域为:
E=[-0.02,0.02]、EC=[-0.2,0.2];
簧载质量的速度、加速度的量化因子分别为:
Ke=3/E=3/0.06=150;
Kec=3/EC=3/0.6=15;
主动力预控范围为:
U=[-150,150];
主动力的基本语言变量范围为:
E=[-3,3];
主控力U比例因子分别为:
KU1=U1/E=150/3=50;
当误差E为正时,实际值大于目标值;当误差E为负时,实际值小于目标值;当误差变化率EC为正时,实际值的变化趋势是逐步增大;当误差变化率EC为负时,实际值有逐步减小的趋势。当输出变量U为正时,有使实际值增大的趋势,当U为负时,有使实际值减小的趋势[3]。当误差大或较大时,选择控制量以尽快消除误差为主;而误差较小时,选择控制量时应注意防止超调,以系统的稳定性为主要考量。当误差为负而误差变化率为正时,系统本身已有减小这种误差的趋势,所以为尽快消除误差且又不引起超调,应取较小的控制量[6-8]。模糊化时各输入输出均采用三角形隶属函数,模糊推理采用Mandain法,解模糊采用重心法。在MATLAB模糊控制模块输入模糊控制规则并搭建二维模糊控制结构子系统,模糊控制规则如表2所示。根据公式2搭建带修正因子的模糊控制器如图4所示。

表2 模糊控制规则Table 2 Fuzzy control rules

图4 修正因子模糊控制器Figure 4 Correction factor fuzzy controller
4 仿真分析
导通ADAMS与MATLAB软件之间通信,其状态函数如图5所示;对路面及修正模糊复合控制器进行封装,建立ADAMS主动悬架联合仿真模型如图6所示。在B级路面上车辆分别以20、40、60、80 km/h的速度直线行驶,计算主被动悬架的车身加速度、悬架动行程、车轮侧向滑移量。主被动悬架计算结果如图7-10所示,仿真步长为0.005 s,仿真时间为10 s。
从计算结果可以看出,主动悬架相对于被动悬架在性能上都有局部提升.在各不同车速阶段,车身垂直加速度性能提升明显,增加整车行驶过程中的乘坐舒适性;悬架动行程,车轮侧向滑移保持不变或者有恶化趋势,因数量级较小,可以忽略不计。各个速度段的悬架性能参数变化如表3所示.
图9、10为车身加速度、悬架动行程的功率谱曲线.其从功率谱曲线可以看出,车身加速度功率谱曲线整车运行过程中,主动悬架的幅值相对被动悬架都较小,同时可以看出,振幅最大值都出现在频率较小处,低频路面输入信息对整车的震动特性较大;悬架动行程功率谱曲线在全速范围内性能提升不明显,被动悬架复制较大,同时低频路面输入信息对整车的震动特性较大。
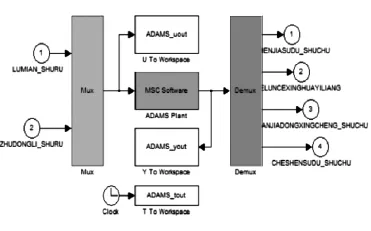
图5 通信状态函数Figure 5 Communication status function
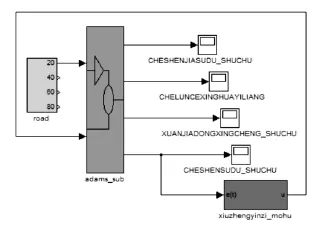
图6 联合仿真模型Figure 6 Co-simulationmodel

表3 性能均方根值Table 3 Performance RMS
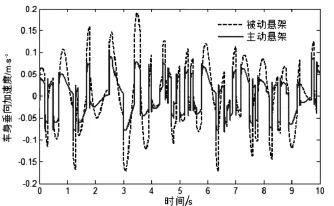
图7 车身垂向加速度Figure 7 Body vertical acceleration

图8 悬挂动行程Figure 8 Suspension dynamic travel
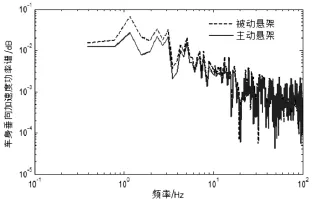
图9 车身加速度功率谱Figure 9 Power spectrum of vehicle acceleration

图10 悬挂动行程度功率谱Figure 10 Power spectrum of suspension travel
5 结论
通过建立双A臂主动悬架联合仿真模型,采用修正因子模糊控制器对阻尼力进行控制,分析悬架在各个不同车速段的车速加速度,悬架动行程及车轮侧向滑移量特性,可得出如下结论:
(1)车身的垂直加速度在全速范围内均有改善,提升整车乘坐舒适性;悬架动行程及车轮侧向滑移量保持不变或者有恶化趋势;
(2)车身的垂直加速度功率谱幅值在全频段相对被动悬架幅值都较小;低频状态时对悬架性能的影响显著。
[1]杨礼康.基于磁流变技术的车辆半主动悬挂系统理论与试验研究[D].杭州:浙江大学,2003.
[2]唐志桥.二分之一车辆悬架系统的动力学仿真研究[J].公路与汽运,2015,166(1):5-8,56.
[3]刘静.带天棚阻尼的1/2车辆主动悬架仿真研究[J].公路与汽运,2015,166(3):15-20+80.
[4]张洁.公路车辆与桥梁耦合振动分析研究[D].成都:西南交通大学,2007.
[5]HROVAT D.Optimal active suspensions for 3d vehicule models[C].Proc of the American Control Conference,Arizona,USA.1991(2):1534-1541.
[6]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社, 2012:171-172.
[7]周兵,赵保华.汽车主动悬架自适应模糊PID控制仿真研究[J].湖南大学学报(自然科学版),2009,36(12):27-30.
[8]张昆,习文辉,邓文华,等.基于CarSim-Simulink联合仿的整车半主动悬架模糊控制仿真研究[J].昆明理工大学学报,2015,40(1):39-44.
(责任编辑:叶丽娜)
Co-simulation Research of DoubleW ishbone Suspension Based on Correction Factor Fuzzy Controller
WANG Xiaopeng
(School of Mechanical&Electronic Engineering,Sanming University,Sanming,Fujian 365004)
Using the ADAMS software,double wishbone suspension multibody dynamicsmodel,Calculated sprung mass velocity and its rate of change as the active suspension control output;Semi-active suspension with fuzzy controller based on a correction factor,the weighting coefficients are controlled by the proportion of the sprung mass velocity and acceleration share fuzzy controller input,wherein theweighting factor using the corrected sprungmass speed adjustment;In MATLAB built suspension system co-simulationmodel,The results show that:the use of fuzzy controller in various stages of vehicle speed to improve the overall performance of the suspension plays a significant role,Vertical body acceleration,stroke improvement prominent in the low frequencies,to enhance vehicle ride comfort characteristics in different speed ranges.
double wishbone suspension;road model;correction factor;co-simulation
U270.1
A
1674-2109(2017)03-0072-05
2016-09-19
王孝鹏(1984-),男,汉族,讲师,主要从事车辆系统动力学及控制、汽车NVH分析与控制的研究。