农用无人机智能植保系统设计
2017-05-08张新星
张新星
(衢州职业技术学院机电工程学院,浙江衢州324000)
农用无人机智能植保系统设计
张新星
(衢州职业技术学院机电工程学院,浙江衢州324000)
介绍了一个以ARM为控制核心,遥控器或PC计算机为交互设备的无人机农业值保系统的主要设计思想。着重对系统的组成、硬件配置、软件设计及主要功能进行了详细的描述,并给出了ARM控制程序的流程图,文章还对系统的通信程序设计做了简要阐述。
无人机;植保系统;ARM
中国作为传统的农业大国,在农业生产中农机使用率较低,传统生产模式依旧占主导地位,劳动力成本高,导致其农业生产效率不高,缺乏市场竞争力,其农业生产现代化水平亟待提高。2015年2月,农业部印发《制定2020年农药使用量零增长行动方案》,要求淘汰传统喷洒工具,推进主要农作物生产全程机械化作业;2016年要在500个县进行试点,重点推进高效植保设备。农业“十三五”规划主攻农业现代化,农机整体渗透率将超过60%,而植保农机使用最低,弹性最大。同时,国务院制定的《中国制造2025》规划也将“机器人”和“航空装备”作为需要突破发展的制造业重点领域。
植保无人机分为固定翼、单旋翼和多旋翼,其中固定翼适合北方大农场大规模作业,单旋翼相对于多旋翼使用成本较高,且需要配套设施支持不利于其推广应用。多旋翼植保无人机以其作业效率高,施药效果好,作业适应性强,作业过程精准等优点非常适合南方中小田块的病虫害防治和大田内局部的精准施药。目前多旋翼植保无人机在其实际推广过程中还存在着定位导航精准度不够、售价较高、智能程度低、作业参数有待优化和喷洒技术亟需改进等诸多问题亟待解决。
1 无人机关键技术
(1)设计农用无人机综合定位系统。农业植保无人机凭借其高效率、低作业成本等特点,目前正逐步地取代人工植保,成为农业植保领域的一种重要装备。定位系统作为农业植保无人机控制系统的核心,是实现无人机自主工作和飞行的关键,也是无人机进行各项植保飞行作业的基础,研发和设计高精度的无人机定位系统是未来农业植保无人机技术进一步突破和应用的关键。为此,针对GPS定位系统在复杂环境下的稳定性差、定位精度有限、无法为农业植保无人机提供高精度稳定的定位服务问题,提出了一种基于GPS和GPRS的混合农业植保无人机高精度定位系统的设计,通过该系统可以有效地弥补GPS在复杂环境的定位不足,提高农业植保无人机的定位精度,对进一步促进农业植保无人机技术发展具有非常重要的意义。
(2)开展基于精准作业参数(速度、高度)的农用无人机下旋气流场特性和施药雾滴空间分布规律的研究。雾滴分布是考核植保器械性能的重要指标,是制定植保器械标准和操作规范的重要依据,探索不同作业高度和不同喷洒浓度的田间药效试验,探索无人机对不同雾化方式的喷头、不同药剂、不同助剂的低空喷洒试验,并对雾滴沉积分布状况及防治效果进行分析;研究无人直升机飞行高度与速度对喷雾沉积分布的影响,并对试验结果进行分析和比较。
(3)开发一套以ARM控制器为核心,计算机作为交互设备的农用无人机植保系统以提高农用无人机的智能程度。着重对系统的组成、硬件配置、软件设计及主要功能进行了详细的描述,主要应用多旋翼智能无人进行液体物质的自动添加,加满后自动停止加注。能够自动巡航,在飞行状态下,该控制系统具有利用惯性测量单元配合机载卫星定位系统测得当前飞行方向及飞行姿态数据并根据系统设计要求提供相关数据的提取与传输的功能。该系统采用计算机、ARM及遥控器对无人机进行控制,实现试验数据的自动采集、分析及处理。
(4)优化农用无人机结构设计。农用无人机飞行系统主要由无人机机体及机载农药喷洒机构组成,其中,六旋翼无人机主要由动力系统(包括:电池、电机、电调、桨);飞行器主体(包含:机架、起落架)和控制系统(包括:遥控器、接收机、飞行控制器)组成。机载农药喷洒系统包括:药箱、软管、液泵、喷杆、喷头以及无线开关。
2 智能植保系统设计
(1)针对GPS定位服务系统的不足进行研究和分析,借助于GPRS网络定位服务研发和设计了一种基于GPS和GPRS的混合定位系统,通过该系统为农用无人机在复杂环境下进行植保作业提供高精度的定位服务,确保植保无人机作业高效、精准。
GPS(全球定位系统)技术是目前应用最为广泛的室外定位技术,其借助于定位卫星系统为用户提供精确的导航和定位服务,其定位示意图如图1所示。整个系统由GPS导航卫星和地面基站及用户终端设备组成。其中,用户终端设备主要负责GPS信息接收,GPS卫星和基站负责提供位置信息服务。在目前无人机飞行控制中,借助于GPS提供位置服务可以实现对无人机进行自主导航和作业线路规划,被广泛地应用于各种无人机自主飞行控制系统中。

图1 GPS定位原理示意图
GPRS定位技术又称为LBS移动基站定位技术,其主要是利用GPRS网络基站信号实现定位,其定位精度高、对环境的要求低,可以抵抗各种复杂环境给定位信号带来的干扰,实现室内和室外的全方位定位,是未来移动定位系统发展的主流。其可以有效地弥补GPS定位系统对环境要求高、在复杂环境下定位精度不足等特点,与GPS定位服务系统配合使用可以使整个定位服务更加准确和可靠。典型的GPRS定位原理示意图如图2所示。
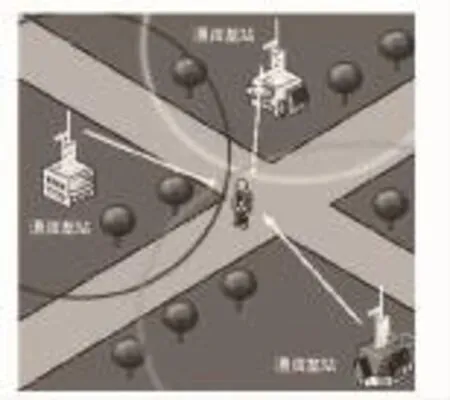
图2 LBS定位系统原理示意图
无人机导航定位系统一般包括空中飞行器、地面监控两个部分,如图3所示。其中,飞行控制器部分主要包括无人机、GPS接收器、惯性测量单元及电源模块等,主要将GPS接收机、惯性测量单元和电源模块的信息实时传输到机载控制器中,机载控制器根据这些信息通过相关的导航定位算法计算出飞行器的飞行姿态和导航定位控制信息,对无人机进行精准的控制。地面监控站通常是以平板或者手机作为监控终端,通过无线传感器接收无人飞行器的飞行信息进行显示,同时监控站还包括无人机飞行遥控器,通过遥控器可以操控飞机飞行,对飞机进行控制。在农业植保无人机中,通常是采用集成式遥控器,在遥控器上集成简单的飞行参数显示屏,对飞行参数进行显示,同时采用操控杆对飞机飞行进行操作。以上是常用的无人机飞行定位导航系统的结构介绍。文章在设计过程中将借助于GPRS定位服务,通过GPRS终端模块实现对移动基站信息的接收和通信,为控制器提供GPRS定位信息。
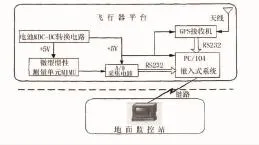
图3 无人机导航定位系统结构示意图
(2)农业航空喷雾技术是指如何利用无人机及其机载设备将喷施物应用于靶标区的作业技术,无人机的航高航速、气象条件、作业设备雾化性能以及药液的理化性质均对喷施效果有着不同程度的影响。针对影响无人机喷施效果开展可控雾滴技术的应用与雾滴飘移控制的研究。通过按作业要求选择适宜的喷头和喷雾参数,控制雾滴粒径、飘移率等以取得最佳喷雾效果;通过建立飞机喷雾的雾滴分布仿真数学模型,运用模型分析雾滴沉降规律,研究航高、航速、风速、雾滴粒径、不同机型对雾滴飘移的影响。
飞机喷雾有自身的特殊性,由于飞行速度快,药液释放位点距作物冠层较高,受风力影响大等因素,其飘移损失较大,造成用药浪费和对环境的污染,如体积中径为48~80μm的细小雾滴在地面仅可回收4%~10%。常规的航空喷洒作业多数采用传统的液压喷头,其在飞行喷雾作业时,雾滴向地面的降落形式主要为自由落体运动,由于受飞机飞行时的气流影响和雾滴触及植物表面后的自由滑落,使得雾滴在靶标植物表面的沉积很难达到理想的效果,实际上所有现有的机械喷雾无论是飞机喷雾或是地面机械喷雾过程中,仅有很少部分药物能到达病虫危害的植物部位,特别是植物的隐蔽部位如植物冠体内部叶片和叶片的背面是很难接触到药物的,这些部位恰恰是病原菌和害虫最集中的地方。将静电喷雾技术与航空喷雾技术结合,能较好地解决前述问题,是因为航空静电喷雾具有独特的优点:一方面飞机喷洒作业时产生的雾滴借助于静电场的作用,增强了喷雾粒子对预定目标的吸附;另一方面,飞喷作业时的雾滴是由上向下运动,在重力和静电场力的双重作用下加速了雾滴向下运动,减少了雾滴飘移损失。此外,飞机飞行时产生较大的气流,提高了雾滴在植株中的穿透性,提高了药液的利用率。
3 结语
文章介绍了无人机农业智能植保作业的具体功能及其实现。从系统的组成、硬件的配置、软件设计及功能设计均做出了具体研究,提供了可实现设计的具体方案。
[1]何勇,张艳超.农用无人机推广应用中需要关注的几个问题[J].现代农机,2015,(1):6-9.
[2]王奕.农用无人机多久才能“飞”起来?[J].营销界(农资与市场),2015,(2):79-80.
[3]阮晓东.农用无人机,现代农业的助航者[J].新经济导刊,2015,(4):66-70.
[4]彭孝东,张铁民,李继宇,等.基于传感器校正与融合的农用小型无人机姿态估计算法[J].自动化学报,2015,(4):854-860.
Design of Intelligent Plant Protection System for Agricultural Unmanned Aerial Vehicle
ZHANG Xin-xing
(College of Mechanical and Electrical Engineering,Quzhou Vocational and Technical College,Quzhou,Zhejiang 324000,China)
This paper introduces the main design idea of a UAV agricultural security system with ARM as the control core,, remote control or PC computer as the interactive device.This paper focuses on the composition of the system,the hardware configuration,the software design and the main functions,and gives the flow chart of the ARM control program.The paper also gives a brief exposition of the communication program design of the system.
unmanned aerial vehicle;plant protection system;ARM
S49
A
2095-980X(2017)03-0085-02
2017-02-19
衢州市科技局项目(2016045)资助。
张新星(1982-),浙江衢州人,硕士,讲师,主要从事电力电子技术、计算机控制技术研究工作。