随“芯”而动
2017-05-08李尔欣
李尔欣
继熟练调节刚度、阻尼和车身高度之后,汽车的主动悬挂又GET到新的技能,避震筒芯又玩出花了?赶紧去“温故知新”一下先。
主动悬挂的新知识
Q 编辑老师你好!我看到丰田新出一款i-TRIL概念车,但始终没搞明白它到底是怎么做到主动倾斜车身的。还请老师简单介绍一下,谢谢!
A 这种会倾斜车身的系统,丰田称之为“Active Lean”,据说是效仿滑雪动作而发明的,早在2007年便已随i-REAL概念车“出道”。而在2014年投身法国共享汽车事业的i-Road更证明Active Lean完全能用于实战,绝非花架子。体长2830 mm的i TRIL凭借这项主动倾斜技术,使车身可在行驶时倾斜10°,再配合25。的前轮转向,可把转弯半径缩短到2m。至于Active Lean的工作原理,概括来讲就是通过ECU车载电脑控制两个前轮悬挂之间的连杆,使其与转向系统联动,并可随车速、油门以及转向角度的变化自动调整前半车身的平衡。顺便一提,这些会玩“Active Lean”的车辆,其座舱与后轴之间都是以活动部件相连接的,可保证在车身摆动时,后轮能够始终垂直于地面。综上所述,Active Lean无疑是一种由ECU主动控制悬挂动作的系统。既然如此,那能否将应用Active Lean系统的悬架称为主动悬挂呢?表面上,Active Lean并没有去调节车身高度,更不曾控制悬挂的阻尼或刚度,显然不同于常见的那些主动悬挂。但正如功能机时代的人不能因为iPhone没有实体键盘就把它踢出手机的队伍,现在同样不能用过去的定义来硬套Active Lean这项新生的技术。而必须回到原点,先搞清楚汽车为什么要用主动悬挂。
简单来说,汽车之所以要用主动悬挂,是因为被动悬挂的各项性能在“出生”时既已固定,并不能在多变的路况下兼顾各方面的需求。换句话说,现在的主动悬挂还远未进化完全。只不过,对于客户的驾乘体验来说,汽车的行驶平顺性和稳定性是最大的两个痛点,厂商自然要优先满足这方面的需求。因此,如今的主动悬挂基本上都围绕弹性元件的刚度以及减振器的阻尼作文章。至于调节车身高度,以及让防倾杆变成冗余部件之类,说实话,那都是额外的福利。而到目前为止,构成悬挂系统的零部件基本上都还是无生命的机械,要想让它们主动应对错综复杂的行车环境就必须加以控制。由此可见,鉴定悬挂是不是主动悬挂的标准,并非看它是否具备可调节的功能,关键要看有没有在悬挂部件上附加可控制作用力的装置。据此判断,Active Lean悬挂应当视为主动悬挂。不仅如此,在Active Lean悬挂中被ECU控制的那根连杆,在限制悬挂倾斜动作的同时,也让车轮始终与地面保持着最大的接触面积,这明显是“传递纵、侧向力及其力矩,并保证车轮相对于车身有正确的运动关系”的导向装置。单凭这点,其实已足以将Active Lean悬挂归为主动悬挂。从第一辆汽车Benz Patent-Motorwagen开始,悬挂就已经是车辆必不可少的组成部分。而在历经被动悬挂、半主动悬挂和主动悬挂的演变之后,如今,悬挂正朝着智能化和网络化的方向进化。但以神經网络的进化速度推算,再过几年,实体悬挂的动作将很可能跟不上智能ECU的指令,届时就必须引入全新的悬挂系统,比如磁悬浮非接触式悬挂之类。如果技术发展得快,说不定有生之年还能亲眼见证一下真正的“一键变魔毯”。
Active Lean系统的进化
从2003年的PM概念车开始,丰田对个人移动工具的探索就进入智能领域。但直到2007年推出i-REAL,丰田才首次提出“Active Lean”概念。而根据当年的资料来推断,i-REAL的Active Lean系统更像是Segway的电子陀螺仪,似乎并非后面-Road和i-TRIL那种由ECU控制的主动悬挂。而i-Road与i-TRIL 所用的Active Lean又有不同。对于3轮摩托i-Road,在保证车身稳定的前提下,丰田允许悬挂大幅度倾斜,因此i-Road可以像普通摩托车一样压着路面过弯。而轮到i-TRIL时,丰田表示经过反复试验,他们认为将车身的最大倾斜角度设在10°是最理想的状态;同时,前轮的转向角度也被设定为25°。而从丰田的描述来看,貌似Active Lean系统还将继续进化出新的形态。
主动悬挂进化之路
悬挂是车架(或承载式车身)与车桥(或车轮)之间的传力与连接装置,其主要作用是保证车辆的正常行驶。即使是Benz Patent-Motorwagen这么原始的汽车,都在后轮轴上装有钢板弹簧。然而,悬挂的发展历史却不是按照被动、半主动、主动这样的顺序线性演变的,严格来说这3种悬挂的进化轨迹是各自独立的。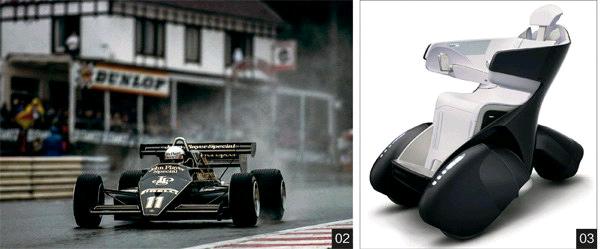
比如雪铁龙DS在1955年使用的液压气动悬挂属于主动悬挂,而1983年丰田Soarer所配备的TEMS电子可调式悬挂却是半主动悬挂。顺便一提,区别主动悬挂与被动悬挂的要点,并不在于液压缸、气筒、电动机、电磁流等可控制作用力装置的执行机构,更不能以是否存在电子控制系统来判断,关键得看悬挂所附加的可控制作用力装置中有没有为其提供能量的能源系统一,这是主动悬挂所特有的组成部分。或者也可以用更直观的方法来判断:半主动悬挂一般只管改变悬挂的阻尼,并不会去调节悬挂的刚度;而主动悬挂就能适时地调节悬挂的刚度和阻尼。

至于今后的发展趋势,主动悬挂将成为主流,并且会日益智能化。事实上,跟主动悬挂有关的研究机构和各家制造商,眼下都在研究如何将悬挂的控制模式从现有的自适应逻辑控制转换为神经网络综合控制;只是现在还处于理论验证阶段,因为神经网络尚未收集到足够的样本数据。而在更遥远的未来不但会有新的控制模式,就连悬挂的传力与连接方式都会改变,请拭目以待。
谈主动悬挂,不得不提的Bose电磁悬挂
早在上世纪八十年代,Bose创始人Amar G.Bose博士就凭藉为美国海军开发核反应堆减震器与个人在电磁学研究上的丰富经验,着手开发比气压、液压悬挂更能提供舒适性的悬挂系统,于是Bose Suspension诞生了,并曾经被安装在一台经过特制改装的LEXUSLS400实验车上面向世人做出令人惊叹的超低车身起伏、超低过弯侧倾表演(有兴趣者,到视频网站一搜“Bose电磁悬挂”就能看到)。在此特別强调的是,Bose的电磁悬挂科技与市面上已经不算少见的MRC磁流变液电磁悬挂可不是一回事,前者是依靠磁体与线圈之间电磁作用直接控制悬挂系统运动,后者则是透过磁感液体改变避震器内阻尼特性,不可相提并论!
传感器:在整套Bose Suspension系统中包括两个传感机构,其一是安装在车头,对车前路面起伏状态进行侦测的雷达;另一是安装在底盘,对底盘运动状态进行侦测比对的G力感应器。这两者汲取到的数据送至Bose Suspension控制电脑运算,然后对悬挂的线性电磁马达送出指令,在车还没遭遇到路面起伏前就预先做好作动准备。
线性电磁马达:Bose Suspenslon采用的驱动机构——线性电磁马达!其透过控制电脑输出的讯号控制,反应速度比起被动的气压或磁流减震快且运作更稳定。更特别的是,这套系统还具备能量回收装置,可以充当发电机的功能为自身运作所需提供电力,也因此Bose Suspenslon线性电磁马达运作时消耗的功率相当低。
这么好的东西,为何没有被车厂广泛应用呢?很现实的问题:近些年车厂更多聚焦在车身轻量化的发展!而Bose经过与多家车厂讨论之后,也决定将Bose Suspension的技术移转至开发车厂更能接受的产品,于是一种减震座椅——Bose Ride便诞生了。
