面向城市测量的低成本高精度GNSS静态测量系统设计与实现
2017-05-06杨锐波
杨锐波

摘 要:随着科学技术的发展,测量工具和测量手段也发生了变化,其中测量型GNSS呈现价格降低、体积缩小的趋势。目前市场上一整套商用GNSS测量系统的价格从几万到几十万不等,且地面基站和移动站体积大、携带不方便等原因,使得商用GNSS测量系统的使用人群仅限于部分专业测量人员,难以在大众市场普及。当今众多领域如无人机、机器制导、精密农业等对高精度定位需求的增加,又促使GNSS测量系统向低成本、高精度、小型化、轻型化发展。该文对U-BLOX的LEA-6T和NEO-M8T两款低成本OEM型GNSS接收机进行不同基线、不同时段下的静态观测,测试结果和精度分析表明这两台低成本GNSS测量系统能够达到厘米级定位精度,满足测量工作和GIS应用的需求。试验证明使用此低成本测量系统能降低测量任务的经济成本,是测量级GNSS接收机中经济适用的选择。
关键词:GNSS 低成本 GNSS接收机 静态测量系统 差分GNSS
中图分类号:P224 文献标识码:A 文章编号:1672-3791(2017)03(a)-0014-03
目前,全球导航卫星系統(GNSS)的定位精度从米级提升到厘米级,且受时间和天气因素的影响较小。GNSS较强的定位能力、高质量的定位精度促使其越来越广泛地被应用于民用和军事上。GNSS定位方式有两种:单点定位和差分定位。单点定位是根据接收机的观测数据确定接收机位置的定位方式。因其只能采用伪距测量,导致单点定位方式主要适用于对精度要求不高的工作。为了满足更高精度的需求,测量级GNSS接收机新增加了载波相位测量值从而进行差分定位。然而测量级GNSS接收机相对比较昂贵,价格一般在几万到几十万元之间。
近几年,OEM型低成本GNSS接收机(板)已经被广泛应用于实际生活中。这种板卡能够输出载波相位,是测量型接收机的良好选择,且这种低成本单频接收机价格低,成本仅几百元,能被普通用户所接受。在静态测量和动态测量中,国内外学者已利用这种板卡进行了大量的实验并且取得了一系列成果。
该文的研究目的是测试成熟的低成本载波相位GNSS定位系统在实际应用中的可能性。主要研究对象是U-BLOX的2种不同型号的OEM型GNSS接收机:LEA-6T和NEO-M8T。测试过程中基站架设于广州市华南师范大学校园内,移动站分别位于广州大学、中山大学、暨南大学南校区内,对应的基线长度分别为5 km、10 km和50 km。
1 低成本定位系统
该次研究中使用的不同型号的OEM GNSS接收机LEA-6T和NEO-M8T是目前使用较广泛的低成本高精度定位系统。下面的章节将具体展开对该定位系统的介绍。
1.1 低成本定位系统——LEA-6T
使用LEA-6T模块作为接收机的定位系统主要组成部件如图1所示。其中图1中的①是LEA-6T OEM板。LEA-6T有几大特点,分别是实时时钟、PPS时间输出、非易失性存储器、差分GPS功能、伪距和相位原始数据输出、L1码相位和载波相位等。这种单频接收机拥有12条平行通道接收来自卫星的信号,更新速率达到1 Hz。接收机芯片的尺寸17.0 mm×22.4 mm×24 mm,重2.6 g。图1中的②③是数据接收软件和用于采集数据的个人电脑。因为接收机本身没有记忆和存储功能,LEA-6T模块必须通过串口连接到数据采集器(一般为个人电脑)。因此装有数据获取软件的个人电脑通过串口连接到LEA-6T板卡上才能获取实时的原始数据(包括伪距和载波相位数据)输出。要用到的数据采集软件就是U-center。这个软件可以上传年历、位置、时间信息,下载年历和相位信息。U-center接收的数据有自己的格式,必须转换成通用的RINEX格式才能被其他GNSS数据处理软件所识别。RTKCOVN作为U-BLOX的一款数据转换软件,通过在Windows系统的个人电脑上运行,选择输入文件和输出路径,完成数据格式的转换。图1中的④是双频或单频测量型天线或低成本普通天线。图1中的⑤是电源。各部件完成连接之后如果想用openlog来记录数据,必须提供5 V电源图1中的⑥是电源/数据传输接口。在GPS模块上有两个串口数据输出端口。一个输出相位信息,另一个输出NMEA协议格式的数据,波特率可以选择1 200、2 400、4 800、9 600、19 200、38 400、57 600、115 200等。
1.2 低成本定位系统——NEO-M8T
在该次试验中,另一款OEM型GPS接收机NEO-M8T是U-BLOX新一代的产品,不仅搜星快,可见卫星多,而且支持北斗、GLONASS、GPS多星座。
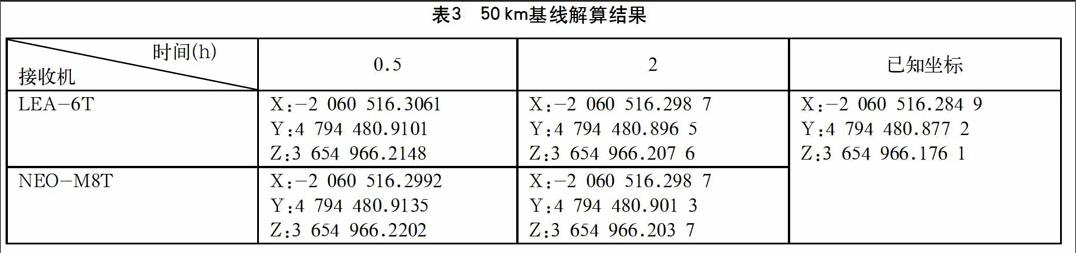
图2是用NEO-M8T进行观测时的一些实时数据信息(卫星数量及状态)。同时记录原始观测数据(伪距和相位数据)。
通过U-center软件我们可以看到很多信息。例如:位置信息窗口以图表的形式实时显示GPS卫星基本信息,包括实时精度、接收机位置、具象的演示水平和垂直方向速度、高度、概率经度纬度、UTC时间,DGPS状态,用于定位的可见星数量,HDOP、VDOP、PDOP、TDOP。“天空图”窗口显示卫星信号强度和各星座之间关系的具体信息。此外,软件还有一个终端程序指令输入窗口,这个开放式的窗口可以把用户预先设定的信息发送给接收机,也可以调整个人设置,问题反馈等。
2 静态定位试验
以华南师范大学校园为中心,用两个不同型号的低成本高精度GNSS测量系统展开3组静态测量。为了验证测试系统的定位精度和性能,我们对不同长度的基线分别进行不同时间的观测。
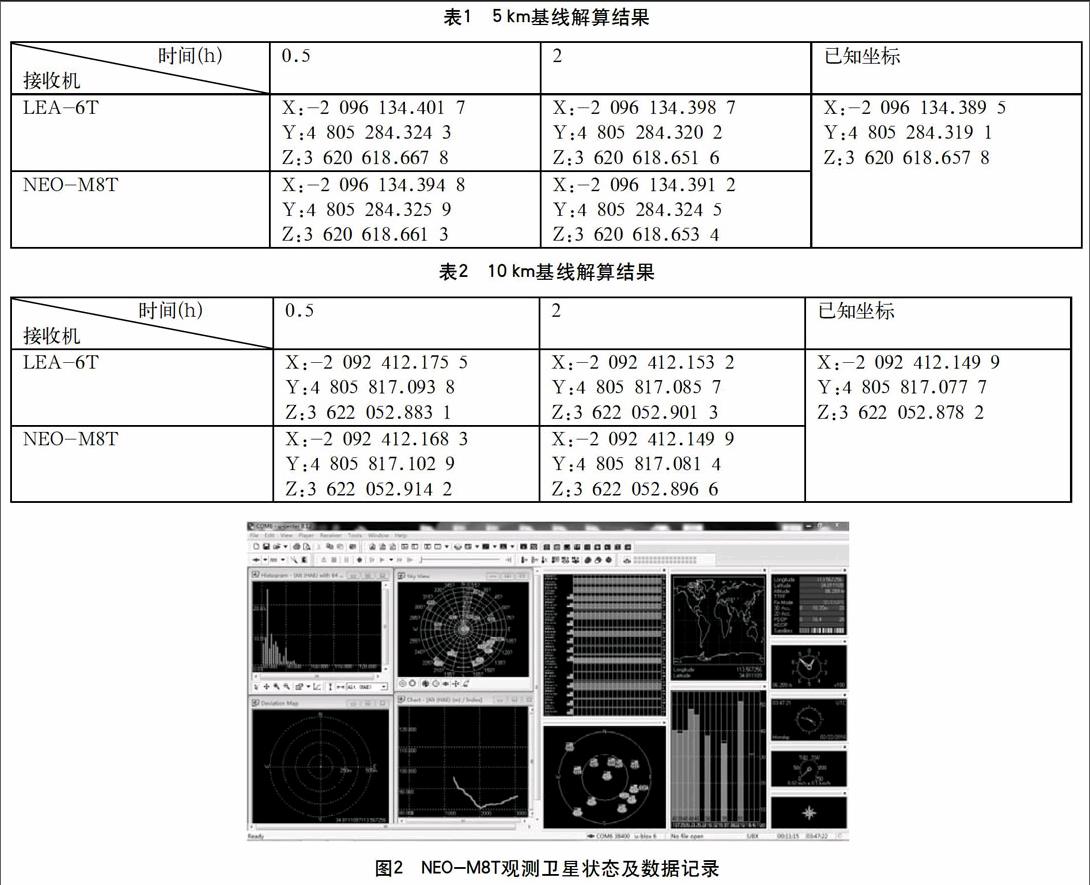
(1)第一组基线长度为5 km,基准站位于学校南门,记为1号点。移动站位于中山大学院内,基准站天线和移动站天线均架设在坐标已知的控制点上,且四周开阔无遮挡。两组静态观测时间分别为30 min和2 h。
结果显示该GNSS测量系统收敛速度快,固定所需时间短。固定率达到99.8%,同时得到E-W、N-S、U-D方向的RMS(均方根误差)值分别为0.62 cm、0.83 cm、0.95 cm。进一步将移动站天线位置坐标解算结果与已知坐标进行比较。
解算结果如表1。
解算结果表明在基线距离5 km条件下,定位精度优于2 cm。
(2)第二组基线长度10 km,基准站位于华南师范大学北训练场内,记为2号点,坐标已知。移动站位于测绘学院。对两组接收机分别进行30 min和2 h的静态观测。
在基线距离为10 km的情況下,整体定位精度仍能达到2 cm,收敛时间稍有延长但是仍能快速固定。固定率为93.4%,E-W方向的RMS值为4.8 cm,N-S方向的RMS值为5.2 cm,U-D方向的RMS值为8.9 cm。各观测时段的解算结果如表2。
对比发现,X、Y方向的定位精度在3 cm以内,高程精度在5 cm以内。
(3)第三组基线长度50 km,基准站位于校园南门1号控制点,坐标已知。移动站位于暨南大学图书馆前,坐标已知。
当基线长度扩大到50 km,收敛时间增加到5 min,固定之后的精度范围在5 cm以内。总体固定率为89.2%,E-W、N-S、U-D三个方向的RMS值分别为3.2 cm、9.3 cm、13.3 cm。移动站定位结果如表3。
当基线达到50 km,X、Y、Z3个方向的定位精度仍能达到5cm,能满足工程测量的要求。
3 结论与展望
在该次研究中,首先介绍了可以输出载波相位数据的低成本OEM型GNSS接收机并且详细说明了该系统在测量中的可用性。为了评估该系统在静态测量时的定位精度,进行了一系列的试验。通过对多组试验数据的分析发现该定位系统可以达到厘米级的定位精度。在实际测量中基线长度一般不会要求太长,这种低成本的GNSS定位系统也正适用于短基线的测量定位任务。试验证明这种低成本GNSS定位测量系统完全能胜任一般的测量任务以及GIS相关应用。同时试验表明该定位系统确实大大降低了测量任务的成本。因此,可将该模块作为经济适用且高精度的大地测量型GPS接收机。
通过大量实验发现,这种低成本高精度GNSS测量系统在短基线测量中能达到较高的精度,这些实验只是基于静态测量和差分后处理的情况下进行的。要想有更广阔的应用前景,必须进行实时定位和动态定位。比如无人驾驶智能系统、机器制导、精细农业、无人机导航与测图等领域。然而这种动态实时定位无疑又给这种低成本的测量系统带来了很大的挑战,如要解决数据实时传输问题、实时解算速度问题以及高动态高频率震动状态下的卫星失锁等问题。此外还可以考虑与IMU构成组合导航系统来实现高动态下的导航与定位。
参考文献
[1] 周锋,秦臻.GPS-RTK技术在矿山高精度沉陷监测的应用研究[J].全球定位系统,2011(6):68-72.
[2] 黄杰云.RTK测量技术在城市测量中的应用与优势分析[J]. 测绘与空间地理信息,2011(3):130-132.
[3] 徐启炳,张立新,蒙艳松.GNSS导航信号体制兼容性分析[J].空间电子技术,2011(2):1-4.
[4] 许其凤.现代GPS相对定位的精度[J].测绘通报,2003(5):6-8.
