机动式诱偏系统抗ARM可行性仿真研究
2017-05-03左文博赵英俊
左文博, 赵英俊
(空军工程大学防空反导学院, 西安 710051)
0 引言
反辐射导弹(ARM)对地面雷达构成严重威胁,雷达关机是早期对抗ARM的手段之一,但由于现代ARM普遍具有抗雷达关机技术,使之该措施逐步失效[1-2]。当前主要采用多个固定式诱偏系统来对抗ARM,取得了一些研究成果[3-4],但由于诱偏系统位置固定,在实战中也容易遭受ARM打击。文中基于ARM基本工作原理,借鉴文献[5-6]的研究基础,提出了一种“告警+机动诱铒”的综合措施对抗ARM的方案。该方案既可以保护雷达,又能使诱饵免受攻击,实现相对简单,造价较低,是一种新的对抗ARM的思路。
1 机动式诱饵抗ARM方案设计
1.1 基本设想
机动式诱饵抗ARM方案是采用“告警+机动诱铒”的综合措施对抗ARM的方案。具体方案为:在被保护雷达附近布置ARM告警装置和一台小型化诱饵,诱饵的辐射信号能近似模拟被保护雷达的电磁辐射。在诱饵机动的方向上建好几条滑轨,以确保诱饵在开机辐射电磁信号情况下可以沿滑轨快速移动到较远的区域。
初始时,雷达正常工作,诱饵不工作。当ARM来袭时,告警装置发出ARM告警信息,在诱饵快速开机的同时雷达关机,当诱饵开机雷达关机后,诱饵系统沿预先准备好的滑轨快速移动并辐射电磁信号,诱饵可以接替雷达的信号并被ARM识别跟踪。当诱饵移动到一定距离后,诱饵关机并沿着相反的方向返回。诱饵关机时刻ARM失去诱饵目标,但由于ARM有抗关机位置记忆功能,仍能朝诱饵关机时刻的位置飞行,将落在机动式诱饵关机时刻的位置。
1.2 工作原理
该方案是基于ARM的被动雷达导引头对电磁信号的跟踪能力,以及现代ARM具有抗关机记忆功能而设计提出的,机动式诱饵工作过程如图1所示。
图1中,M为ARM,T为目标雷达,T1为诱饵源。图1(a)中,当ARM来袭时,告警装置发出告警信号,这时诱饵开机,雷达迅速关机,由于诱饵同被保护的雷达布置在一起,ARM无法区分出雷达与诱饵信号,ARM将跟踪诱饵源;图1(b)中,ARM继续跟踪辐射电磁信号并不断机动的诱饵源;图1(c)中,诱饵机动到一定距离后关机,由于ARM具有记忆功能,将朝着关机时刻的预测命中点飞去;图1(d)中,诱饵源关机后迅速沿原路返回,ARM命中诱饵源关机时刻的位置,雷达和诱饵源均未被毁伤。
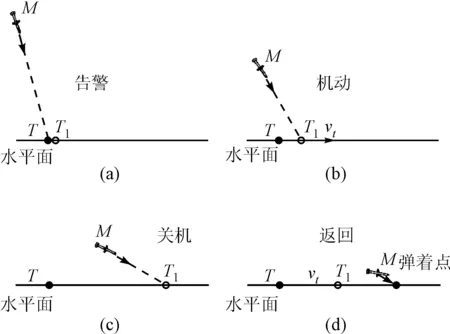
图1 机动诱饵抗ARM工作过程
2 ARM攻击雷达弹道数学建模
2.1 基本假设及坐标系定义
1)ARM以“哈姆”为例,假设为一个可操纵质点。
2)地表面为水平面,诱饵做匀速直线运动。
3)建立地面直角坐标系,取ARM发射点在地面上的投影点为坐标原点,OX轴与地球表面相切,并指向ARM攻击地面雷达的方向;OY轴垂直于地面,向上为正;OZ轴垂直于XOY平面,构成右手直角坐标系。
2.2 ARM飞行弹道数学模型
由机动式诱饵抗击ARM工作原理可知,ARM的整个飞行分为初始加速段、雷达单独工作时ARM导引头跟踪雷达信号引导段、雷达关机后诱饵工作时ARM导引头跟踪诱饵源信号引导段、诱饵关机后捷联惯导引导段4个阶段。将ARM在空间的三维运动分解为水平面和垂直面内的平面运动,如图2所示。考虑到雷达和诱饵均关机后,ARM落地点的不确定性较大,为保险起见,通过预判ARM的大致来袭方向,在其来袭方向的夹角内(45°≤α≤135°)沿某一方向移动。

图2 ARM及诱饵运动示意图
运用时间差分法对ARM的飞行弹道进行建模,其基本思想是采用逐步逼近的方式得到ARM飞行航迹,这样既可以简化模型,又不致使结论失真。具体建模步骤如下:
1)发射ARM时刻为t0,ARM坐标为(0,ym0,0),雷达坐标为(xt0,0,zt0),K为比例导引系数。
2)当告警装置发出告警信息,雷达关机并且诱饵源开机机动时,ARM开始跟踪诱饵。开始引导时刻为t1,ARM、诱饵坐标分别为(xm1,ym1,zm1)、(xt1,0,zt1),假定开始引导时,ARM的速度与弹目视线方向一致。
3)若在t2-t1=Δt时间段内ARM的速度方向保持不变,t2时刻ARM的坐标为:
(1)
弹目视线方向:
(2)
ARM的速度矢量方向:
(3)
4)若在t3-t2=Δt时间段内ARM的速度方向保持不变,则在t3时刻ARM的坐标为:
(4)
在诱饵关机返回后,ARM进入捷联惯导引导段,朝向诱饵关机时刻所在的位置飞行。
3 ARM弹道仿真及可行性分析
3.1 仿真初始条件及仿真流程
1)ARM参数。ARM发射的高度取10 000 m。ARM的初速取340 m/s,发动机工作6 s中以120 m/s2加速飞行,发动机关机后保持匀速飞行。ARM比例导引系数[7]K=3。ARM杀伤半径rk=30 m,自毁时间tsd=60 s。
2)诱饵相关参数。诱饵与雷达初始坐标为(39 000 m,0 m,20 000 m)。诱饵平均速度分别取10 m/s、20 m/s。诱饵的移动方向分别取α=45°、90°、135°。诱饵的换接时间(雷达开机转化为诱饵开机的时间)T1=16 s。
诱饵源其辐射频率、波形等与雷达信号近似一致,与雷达站的功率比选取为1,以确保雷达关机诱饵开机时ARM稳定跟踪诱饵系统。设专用的ARM告警系统能约在距雷达44 km处提供告警信息,告警时间约为41 s[8]。
3)仿真流程。采用蒙特卡罗法对ARM飞行弹道进行仿真,仿真时间步长Δt取0.01 s,仿真次数取500次,仿真流程如图3所示。
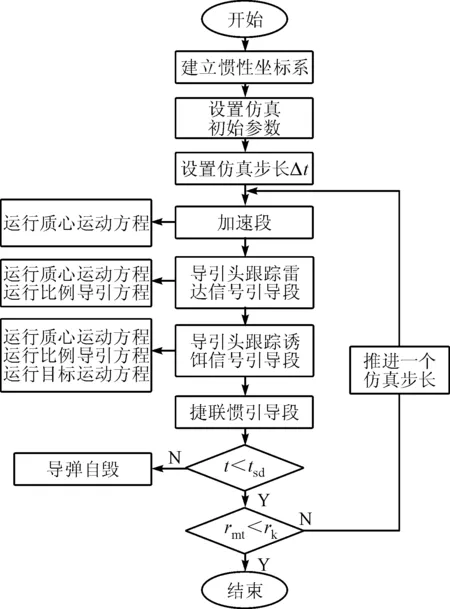
图3 ARM运动过程仿真流程图
3.2 仿真结果及分析
1)ARM落点距离雷达及诱饵的位置。通过仿真,ARM落点距离雷达及诱饵的距离如表1所示。

表1 ARM落点距离雷达及诱饵的距离
从表1可以看出,ARM的落点与雷达站的距离为135.7~315.2 m;ARM的落点与诱饵的距离为85.9~226.7 m,ARM的杀伤半径仅为30 m左右,落点偏差均远大于ARM的杀伤半径。可见,机动诱饵抗ARM方案可以很好地将ARM诱偏,起到了保护雷达的目的。
2)ARM的视场角变化。通过仿真,α=45°、90°、135°时,ARM攻击方向与辐射源辐射波束夹角在水平平面和垂直平面的变化如图4所示。
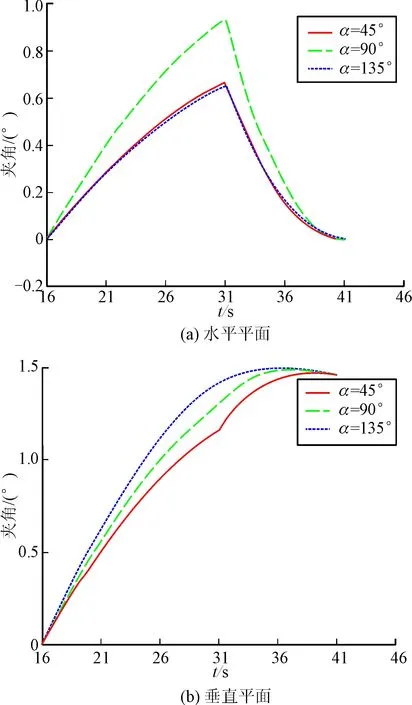
图4 ARM攻击方向与辐射源辐射波束夹角变化(水平平面、垂直平面)
从图4中可以看出,在ARM整个飞行过程中,ARM攻击方向与诱饵辐射波束夹角绝对值变化均小于2°。“哈姆”被动导引头的视场角为±2°[9],诱饵源的机动始终处于ARM导引头视场角范围内。当诱饵机动时,ARM可以稳定对其进行跟踪,从而将ARM引偏,保护了雷达和机动诱饵。
3)ARM的飞行弹道。当诱饵以速度为20 m/s,45°、90°、135° 3个不同方向机动时,ARM的三维弹道仿真图如图5所示。
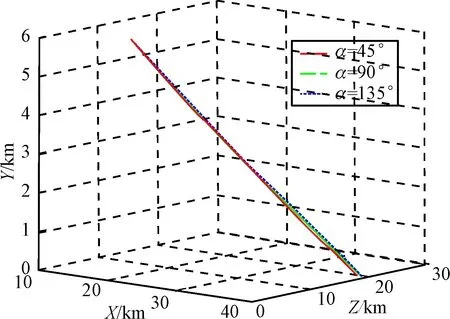
图5 ARM三维弹道仿真图
从图5中可以看出,诱饵从不同方向机动时,对ARM的弹道影响变化不大,弹道均近似为一条直线,说明诱饵从不同方向机动时对ARM的过载要求很小,ARM完全可以朝着诱饵关机时刻的位置飞去。
4 结束语
综合仿真结果,机动式诱饵抗对抗ARM是一种行之有效的方案。当告警时间为41 s时,诱饵以20 m/s的速度、沿45°方向机动,机动至400 m处返回时,ARM落点距雷达的距离为315.2 m,距诱饵的距离为215.4 m,诱偏效果最佳。对于考虑ARM从不同方向来袭的可能,以被保护雷达中心附近布置3条各间隔60°的滑轨,根据具体来袭方向选择与弹道方向接近45°的滑轨方向移动;同时,若有某个滑轨遭到毁坏,可以选择备选滑轨再次机动,保证再次实施有效诱偏。
后续研究的重点是当两枚或多枚ARM连续攻击时,机动诱饵方案的实施。同时,诱饵辐射参数的选取是ARM能否稳定跟踪诱饵的关键因素,也是装备能否技术实现的重要条件。
参考文献::
[1] LOFFLER T, NIELSON J. International HARM precision navigation upgrade-a GPS/INS missile upgrade that improves effectiveness and minimizes friendly-fire accidents [J]. IEEE Aerospace and Electronic Systems Magazine, 2003, 18(5): 26-31.
[2] 裴云, 刘利利. 对雷达对抗反辐射导弹作战效能的评估 [J]. 现代雷达, 2004, 26(9): 26-28.
[3] SHI Zhen, LI Yan, YUAN Wenliang. Modeling of guidance signal of anti-radiation missile in the case of multiple sources [C]∥Henan University of Science and Technology. Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation. [S.l.]: IEEE Press, 2006: 2264-2268.
[4] 郑木生. 有源诱偏抗反辐射导弹技战术及布站方式研究 [D]. 长沙: 国防科学技术大学, 2005.
[5] 彭飞, 钱建刚. 雷达机动轨道抗ARM打击可行性研究 [J]. 空军雷达学院学报, 2004, 18(3): 51-53.
[6] 史震, 刘涛, 王慧. 沿轨移动辐射源诱偏抗ARM的仿真研究 [J]. 哈尔滨工程大学学报, 2008, 29(1): 35-39.
[7] CHEN Baixiao, WANG Yongtian, ZHANG Shouhong. Detection and recognition of high-speed anti-radiation missiles with simple multi-antenna VHF radar [C]∥Chinese Institute of Electronics (CIE). 2006 CIE International Conference on Radar. [S.l.]: IEEE Press, 2006: 1-4.
[8] 刘石泉. 弹道导弹突防技术导论 [M]. 北京: 中国宇航出版社, 2003: 237-239.
[9] 吕彤光. 被动雷达导引头抗干扰技术研究 [D]. 长沙: 国防科学技术大学, 2001.
