波浪滑翔机的水动力性能分析
2017-05-02薄玉清刘慧芳
张 禹,薄玉清,刘慧芳
(沈阳工业大学 机械工程学院,沈阳 110870)
波浪滑翔机的水动力性能分析
张 禹,薄玉清,刘慧芳
(沈阳工业大学 机械工程学院,沈阳 110870)
波浪滑翔机是一种新型的无人观测平台,能在不同海况下对海洋环境进行持续观测。介绍了其总体结构和运动机理,它是通过单纯的机械结构将波浪能转化为波浪滑翔机的前进动力,从而解决了常规滑翔机需要自带能源的弊端。基于三维势流理论和波浪的绕射辐射理论,再结合水动力分析软件AQWA, 在频域内的规则波作用下,分析在不同方向下的水面浮体的动力响应,得到运动响应幅值算子(RAOs)。还分析规则波波幅对水下滑翔体推力以及整体航速的影响,得到推力与航速的关系。实验结果为以后的研究提供了理论数据参照。
波浪滑翔机;双体结构;水动力;运动响应
0 引言
随着社会经济的快速发展,陆地资源的逐渐枯竭,人们逐渐的就把目光投向了资源丰富的海洋,因此海洋的开发利用就成为一个重要话题[1]。紧接着就出现了各种各样的海洋观测和开发设备,但是这些设备的动力系统一般采用的是燃油或电池,需要能源的补充,因此续航能力非常有限,无法进行长时间的监测,而且容易造成海洋环境污染[2]。要从根本上解决这一问题,就必须改进它的驱动方式或者采用新的能源供应。
波浪滑翔机的出现就很好的解决了这一问题,作为一种新型的无人观测设备,它是利用波浪能进行驱动,几乎不需要提供额外的能量,实现了强的续航能力,而且没有废气和废物的排放,对海洋环境不会造成污染[3,4]。在其上搭载有太阳能电池板,为各种测量仪器进行能源补充,因此可实现长时间﹑大范围的自主航行[5,6]。波浪滑翔机搭载的多种传感器,可以获取各种海洋参数,并且将数据及时的传递到岸站上,实现对各个区域的海洋环境的监测。
1 波浪滑翔机
1.1 总体结构
波浪滑翔机是由水面浮体、水下滑翔体和绳缆三大部分组成。水面浮体上主要载有太阳能电池板﹑控制系统﹑传感器系统以及可充电电池等。水下滑翔体则是使用纯机械的方式,将波浪能转化为前行的动力,其主要由可转动的翼板﹑翼板支撑框架等组成。图1为波浪滑翔机的三维模型:水面浮体长为2米、宽为0.6米、深为0.2米。水下滑翔体长为1.8米、水平翼展为1.18米、高度为0.4米。

图1 波浪滑翔机三维模型
1.2 推进原理
波浪滑翔机是利用波浪能推进,推进系统完全由机械结构组成。当波浪滑翔机沿着波面爬升时,水面浮体上浮并通过绳缆拉动水下滑翔向上运动,此时水下滑翔体的翼板在水动力作用下向后下方转动,从而产生了水平向前的推力,带动水面浮体向前运动。当波浪滑翔机沿着波谷下滑时,水面浮体下沉,水下滑翔体则在重力作用下产生向下运动,此时水下滑翔体的翼板向后上方倾斜,再一次产生向前的推力,将下降运动转换成向前运动。由此可见,水下滑翔体在上下运动过程中,翼板受到的水平分力总是沿着其前进的方向。在该动力的作用下,而且波浪波峰和波谷不断重复,波浪滑翔机就可持续向前运动。
由推进原理可知,产生水平驱动力的是转动了一定角度的翼板,下面对这一过程中的翼板进行受力分析。图2为翼板在上升期和下降期的受力情况。
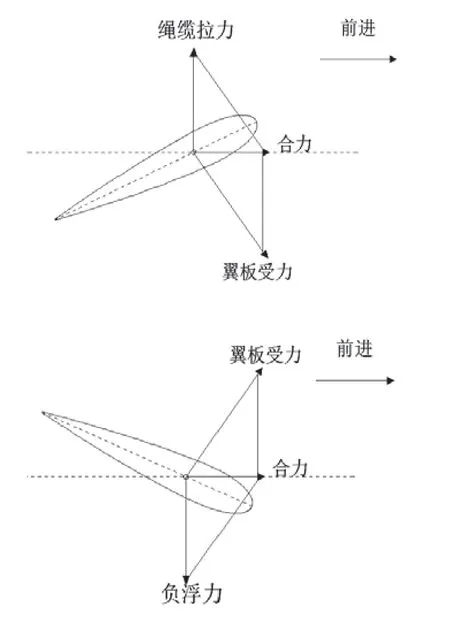
图2 上升和下降
2 理论基础:
对于不可压缩、无粘性、无旋流的理想流体,速度势在流场域内满足拉普拉斯方程[7]:
由方程V=▽φ解出速度势φ,得到速度的分布。然后再根据拉格朗日方程:
求得浮体表面的压力分布。一阶波浪力的速度势为:

其中:ω为规则波频率;φI为入射波速度势;φd为绕射波速度势;φj为六自由度方向的速度势(j=1,2,3,4,5,6)。
入射波的速度势为:

其中:k为波数,由ω2=gkth(kd)求得;d为水深;ζ为入射波幅。
解得到一阶波浪力速度势后,由伯努利方程[8]求得水压力:
然后,沿整个湿表面积分得到一阶波浪力:

其中:Fj为第j个自由度的一阶波浪力;nj为第j个自由度的法向。
AQWA在进行计算时,将系统受到的波浪力F分为2部分:入射力和绕射力,并且两个力都是简谐的。所以:
入射力为:
绕射力为:
AQWA通过求解以下运动方程,计算得到水面浮体在规则波作用下的响应,即RAOs。

其中:Ms为结构质量矩阵;Ma为水动力附加质量矩阵;C为系统线性阻尼矩阵;Ks为系统总刚度矩阵;F为系统所受的波浪力(单位波高);X为响应幅值算子(RAOs);ω为入射规则波频率。
3 仿真结果
3.1 水面浮体性能分析
波浪作用下船体的运动响应可由响应幅值算子(RAO)来描述,它是波浪的波幅到船体位置参数的传递函数,其表达式为:

其中:A为入射波幅值;X(ω,β)为传递函数RAOs,它与浮体的位置、几何形状和入射波方向有关。
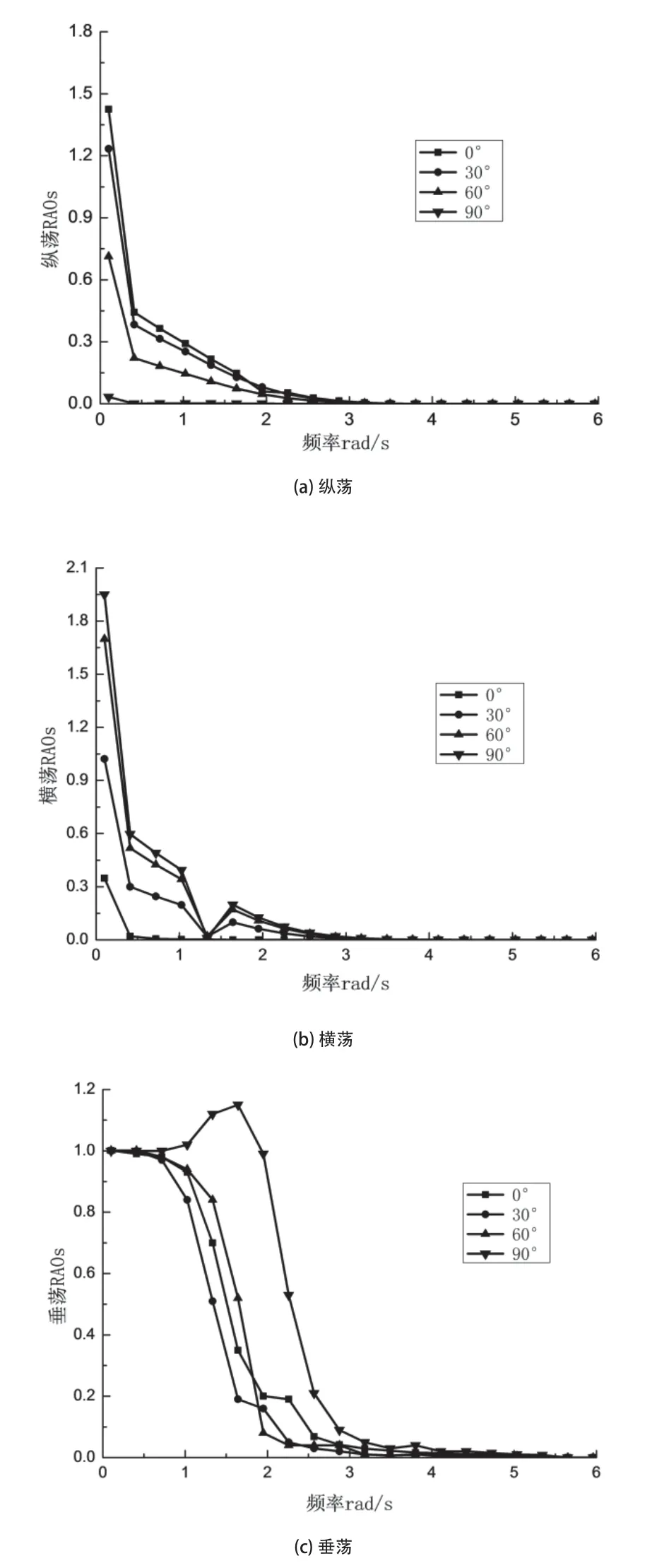
图3 水面浮体在不同方向上的纵荡、横荡、垂荡RAOs
由图3(a)和图3(b)中可以看出,在4个波浪方向下的纵荡和横荡都随频率的增大而减小,当频率达到4rad/s时,都下降到0。入射波方向为90°时,纵荡不随频率而变化,均为0,而此时横荡则达到最大值;入射波方向趋近于0°时,纵荡逐渐增大,横荡减小。从图3(c)中可以看出,当入射波方向为90°、频率在2rad/s附近时,垂荡达到最大值。入射波方向趋近于0°时,垂荡在1rad/ s~2rad/s区间内变化较明显,从1m下降到0.1m左右。
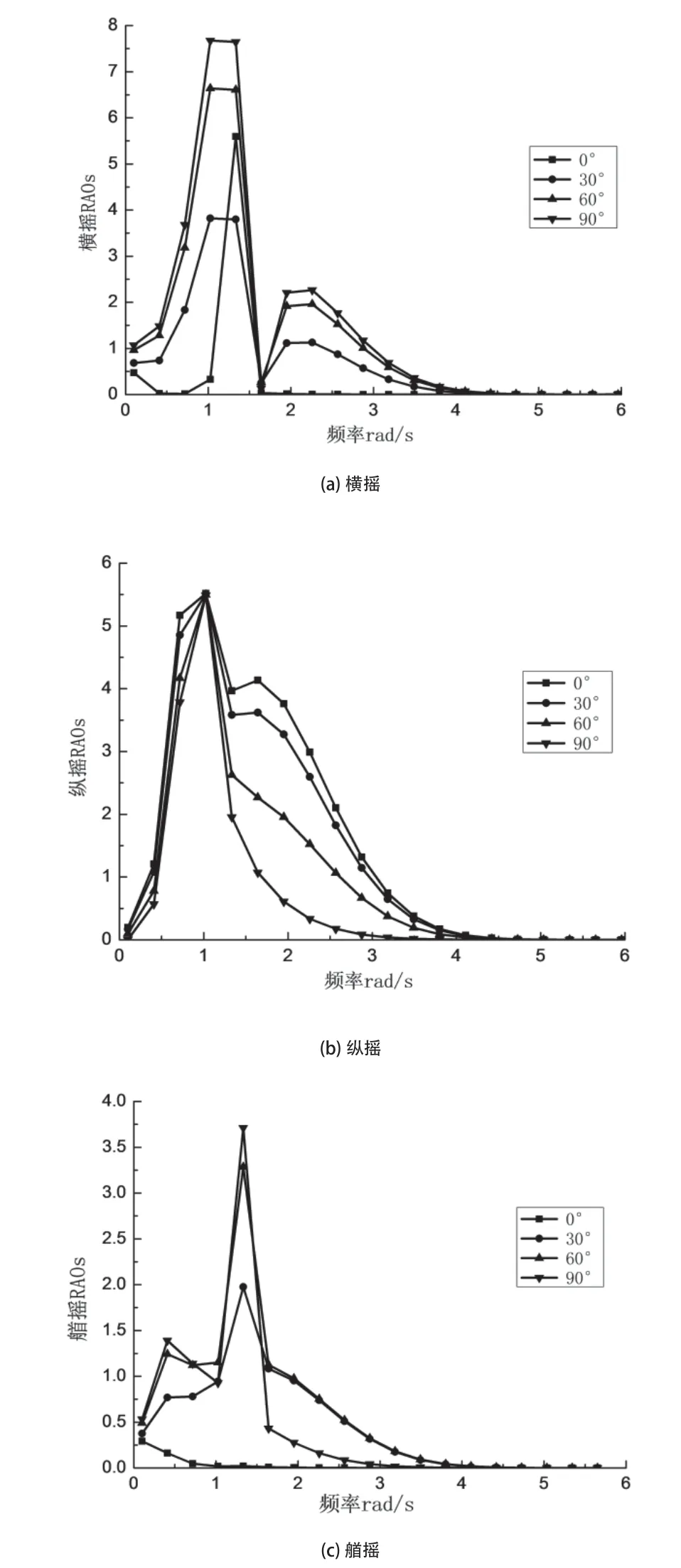
图4 水面浮体在不同方向上的横摇、纵摇、艏摇RAOs
从图4(a)中可以看出横摇的曲线类似于开口向下的双抛物曲线,即随着频率的增大出现两次极大值。在1rad/s和2rad/s附近处两次达到最大值,频率达到4rad/s时,横摇下降到0。由图4(b)、4(c)可知纵摇和艏摇则是随着频率的增大先增大后减小,在1rad/s附近达到峰值后逐渐减小,到4rad/s附近均下降到0。当入射波方向为0°时,艏摇几乎不随频率而变化,均趋于0。
3.2 波浪滑翔机运动仿真分析
水下滑翔体所产生推力的大小是衡量波浪滑翔机水动力性能好坏的重要参数,而航速的大小则是评价其性能好坏的最直观的参数,在不同海况下水下滑翔体产生推力的大小将直接影响航速的高低,从而影响其工作效率和其他性能,因此下面就分析了在不同波幅的规则波条件下水下滑翔体所产生的推力以及整体航速的变化趋势。
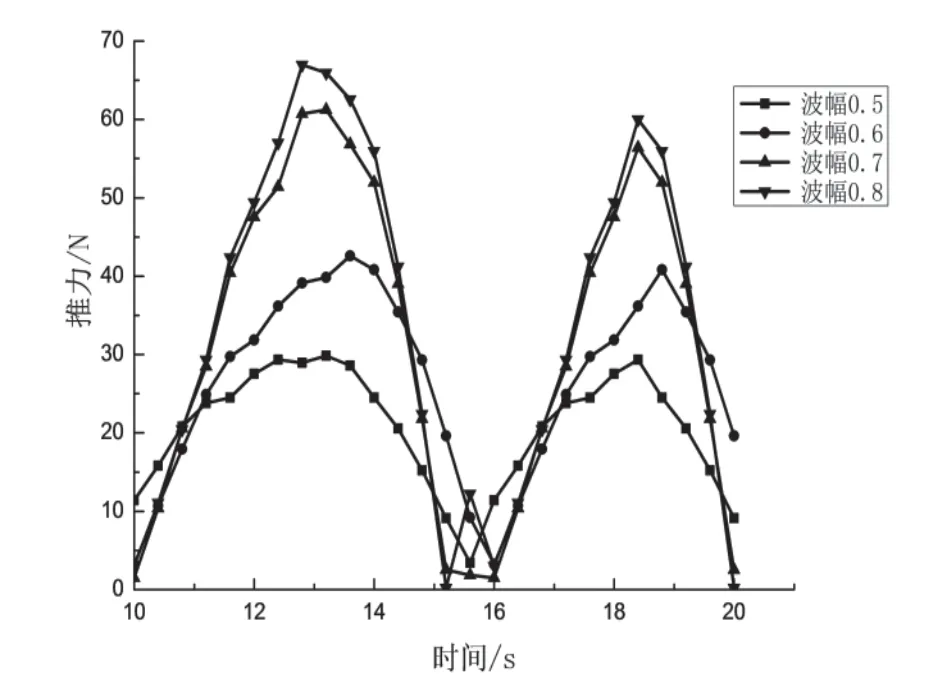
图5 时间-推力
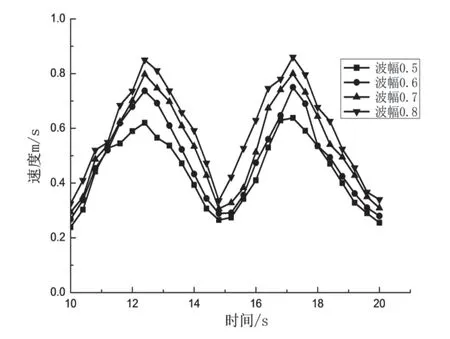
图6 时间-速度
图5显示了在不同波幅的规则波下水下滑翔体所产生的推力的变化趋势。由图可知不同波幅下的水下滑翔体所受到推力大部分时间为同一个方向,可一直驱动其向前运动。而且这个力是以正弦规律在变化,也就是波浪滑翔机从波谷向波峰运动时,推力先由零加速到最大,再减速到零。当波幅逐渐增大时水下滑翔体所受推力的最大值逐渐增大,但此时波浪滑翔机在波浪中航行的阻力也会相应增大。
图6为在不同波幅的规则波下,波浪滑翔机平均速度的变化趋势。由图可知,波浪滑翔机的速度为同一方向,可以实现持续稳定航行,波幅的不同会导致波浪滑翔机的航行速度有所区别,分析可知,随着波幅的增大,波浪滑翔机的最大速度有所提高。由于阻力也相应的增大,因此波浪幅值越大,可能会导致航速反而下降。
4 结束语
本文以波浪滑翔机为模型,应用AQWA流体力学计算软件对其进行仿真分析,研究了波浪滑翔机的水动力性能。基于频域方法,对水面浮体在不同波浪方向下的运动响应进行模拟,得到其运动曲线。接着计算了在不同波幅条件下,波浪滑翔机所受推力和整体航速,规则波波幅对水下滑翔体推力有较大的影响,在确保波浪滑翔机安全的前提下,波高越大的环境对推力的产生越有利,即高海况环境下水下滑翔体产生推力更大。但此时波浪滑翔机在波浪中航行的阻力也会增大,因此可能会导致航速反而会下降。这样就为后续的进一步研究提供了理论数据。
[1] 徐春莺,陈家旺,郑炳焕.波浪驱动的水面波力滑翔机研究现状及应用[J].海洋技术学报.2014,33(2).
[2] 李小涛,王理,吴小涛,等.波浪滑翔器原理和总体设计[J].四川兵工学报,2013,34(12),128-131.
[3] Frolov S,J. Bellingham, W.Anderson, et al. Wave Glider—A platform for persistent monitoring of algal blooms[A].IEEE OCEANS[C].2011:1-5.
[4] Manley J, S Willcox.The wave glider: A persistent platform for ocean science[A].IEEE-Sydney OCEANS[C].2010:1-5.
[5] 田宝强,俞建成,张艾群,等.波浪驱动无人水面机器人运动效率分析[J].机器人,2014,01.36(1),43-49.
[6] 戴源.波浪能驱动的机动浮标的动态分析与设计[D].中国海洋大学,2014.
[7] 贾欣乐,杨盐生.船舶运动数学模型[M].大连:大连海事大学出版,1999.
[8] 李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,2005.
Analysis on hydrodynamic performance of the wave glider
ZHANG Yu, BO Yu-qing, LIU Hui-fang
TB126;U644
:A
1009-0134(2017)03-0123-04
2016-11-17
国家自然科学基金(51305277);沈阳市科技创新专项资金-重点实验室建设专项(F13-297-1-00)
张禹(1970 -),男,辽宁沈阳人,教授,博士,研究方向为机器人技术。
