折叠三角警示牌移动机器人的设计与实现
2017-05-02程诗豪李大寨
陈 林,程诗豪,李大寨
(1.北京航空航天大学 机械工程及自动化学院,北京 100191;2.北京市第二中学,北京 100010)
折叠三角警示牌移动机器人的设计与实现
陈 林1,程诗豪2,李大寨1
(1.北京航空航天大学 机械工程及自动化学院,北京 100191;2.北京市第二中学,北京 100010)
从高速公路上人工放置三角警示牌的危险性出发,设计了一种可远程控制的搭载可自动折叠三角警示牌的移动机器人。机器人的机械结构主要由底盘、轮式行走机构、可折叠三角警示牌等组成,通过在三角警示牌的关节处放置驱动舵机,实现三角警示牌的自动折叠与展开。其控制系统采用STM32F103RCT6芯片作为控制核心,通过L298N电机驱动模块控制电机,通过舵机供电电源模块给舵机供电;采用FS-GT3C遥控器,其频率范围:2.40~2.48GHz其配备的接收机与单片机通过串口进行通信,从而实现对移动机器人的远程控制。
折叠三角警示牌;移动机器人;STM32;串口通信
0 引言
移动机器人作为机器人技术的一个分支已经被广泛的应用于救灾、军事、探索等诸多领域,它集中了机械设计、计算机技术、通信工程、人工智能和自动化控制等诸多学科不同领域的先进研究成果,是目前科学技术发展的热门领域之一。
随着人们生活水平的提高,汽车已逐步走进千家万户。车辆行驶途中难免发生一些故障,如果在高速路上汽车发生故障了,就需要人拿着三角警示牌放在车后150米处。由于高速路上车速快、车况复杂,人去放置三角警示牌具有很大的危险性,并且人在高速行走也违反交通法规。针对此问题,本文设计了搭载三角警示牌的移动机器人。该移动机器人有两个特点,第一个是可通过遥控器进行远程控制,第二个是可以实现三角警示牌的自动折叠、展开。
1 机器人机械机构设计
1.1 机械结构总体组成
该折叠三角警示牌移动机器人机械部分主要由移动底盘和折叠三角警示牌两部分组成。图1为该移动机器人搭载的折叠三角牌展开图,图2为该机器人三角牌折叠图。
1.2 底盘设计
对于移动机器人底盘的制作,目前普遍采用一下两种不同结构形式的底盘。一种是通过多个部件以各种不同形式的联结进行拼接,另一种是整体性的底盘,即直接进行整体加工。本文中的移动机器人采用拼接性的底盘结构,通过螺栓将各部分固定,整个底盘由上底板、下底板、左侧板、右侧板、前侧板、后侧板六部分拼接而成,形成一个相对封闭的底盘,单片机等控制系统的模块安放在下底板上,即位于封闭底盘中,可折叠警示牌位于上底板上。图3为底盘的结构图。
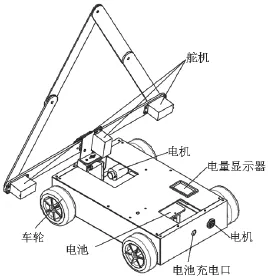
图1 移动机器人三角警示牌展开图
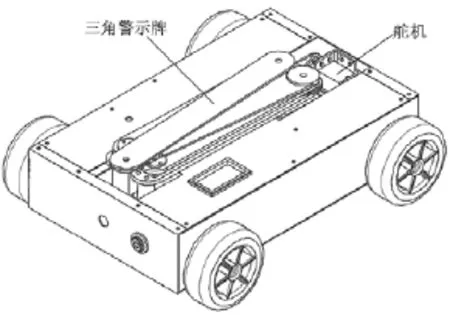
图2 移动机器人三角警示牌折叠图
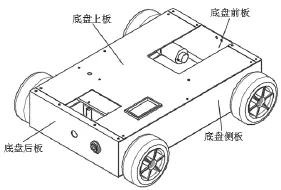
图3 折叠三角警示牌移动机器人底盘
1.2.1 底盘驱动方式
本课题中的移动机器人所搭载的三角警示牌重量轻,故采用两只电机即可满足要求,安装在移动机器人前部的两侧;通过联轴器与车轮相连,分别控制移动机器人的两侧运动;后部的两轮从动,依靠两侧的速度差来实现移动机器人的转向以及原地旋转。
1.2.2 驱动电机
驱动电机采用直流减速电机,其详细参数如表1所示。
1.2.3 折叠三角警示牌结构设计
1)折叠三角警示牌结构分析
折叠三角警示牌的各部分杆件采用硬质塑料制作,外层涂上反光材料。折叠三角警示牌关节处采用舵机驱动,其整体结构如图4和图5所示。
2)关节扭矩计算分析
由扭矩计算公式M=F.L,其中M表示扭矩,单位为N.m;F为作用力,单位为N。
下面对三个驱动关节承受的最大扭矩进行近似计算,首先对第一级关节需要承受的扭矩进行近似计算,承受作用力为4.7N,物体转动时重心到转动中心的最大等效距离为130mm,故第一级关节承受的最大扭矩为。
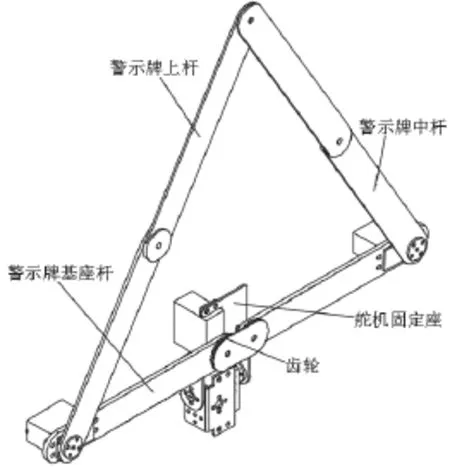
图4 三角警示牌展开图
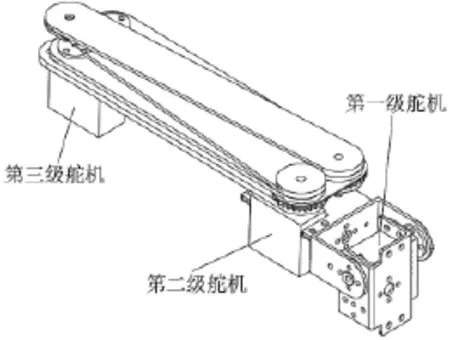
图5 三角警示牌折叠图
第二级关节需要驱动警示牌展开,故上、中杆和基座杆的重量均在第二级关节处产生转矩,其作用力等效为3.58N等效重心到关节中心的最大等效距离为95mm,故第二级关节承受的最大扭矩为。
第三级关节作用对称分布,故只需要计算一侧的关节承受扭矩即可。作用在上杆、中杆上的等效作用力为0.98N,展开时的转动过程中距离第三季关节的最大等效距离为145mm,故第三级关节承受的最大扭矩为。
通过计算和仿真,选择MG996R舵机进行关节的驱动,MG996R舵机的相关参数如表2所示。对三角警示牌进行运动分析,得到三级舵机承受的力矩变化曲线如图6所示。

表1 JGA25-371直流减速电机参数
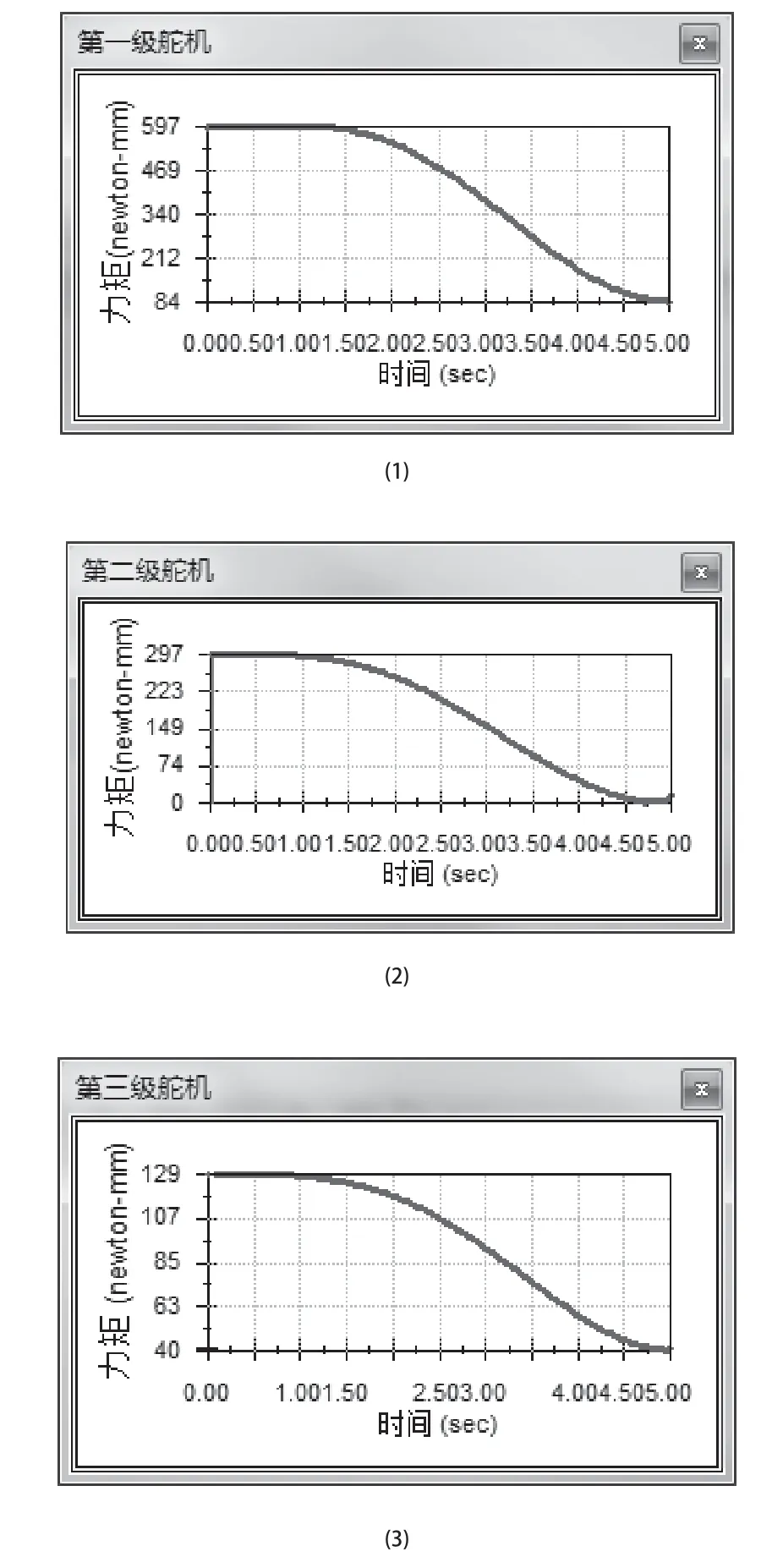
图6 舵机关节力矩变化曲线
3 控制系统设计
3.1 控制电路设计
控制系统核心采用ARM V7-M架构微控制器STM32F103RCT6,通过STM32103RCT6控制电机驱动模块从而控制电机。控制系统结构图如图7所示。
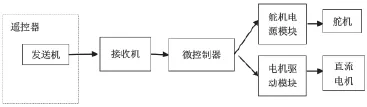
图7 控制系统结构图
3.2 遥控器通信协议
FS-GT3C遥控器采用PPM信号与接收机进行通信,用调制信号控制脉冲序列中各脉冲的相对位置(即相位),使各脉冲的相对位置随调制信号变化,配置流程如图8所示。
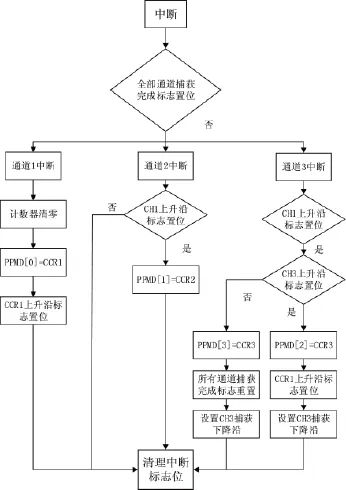
图8 通信协议配置

表2 MG996R的相关参数
4 结论
本文设计的可折叠三角警示牌移动机器人的创新点在于避免了人工放置三角警示牌的危险性,有利于保障人员安全,并且三角警示牌设计成可折叠结构有利于节省空间。该机器人的推广使用具有十分重要的社会意义。
[1] 张毅,罗元,郑太雄,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007,09:32.
[2] 张国良,敬斌,刘延飞,熊磊.自主移动机器人设计与制作[M].西安:西安交通大学出版社,2008:23-31.
The design and implementation of mobile robot with folding emergency refl ective triangles
CHEN Lin1, CHENG Shi-hao2, LI Da-zhai1
TP24
:B
1009-0134(2017)03-0145-03
2016-11-20
陈林(1994 -),男,湖南永州人,硕士研究生,研究方向为机器人控制技术。
