油门杆操作评判定量分析
2017-04-28叶坤武魏思东
叶坤武,魏思东,包 涵
(空军航空大学 a.研究生队;b.飞行器与动力系,长春 130022)
【信息科学与控制工程】
油门杆操作评判定量分析
叶坤武a,魏思东b,包 涵a
(空军航空大学 a.研究生队;b.飞行器与动力系,长春 130022)
针对飞机油门杆操作不当可能会引起发动机喘振或发动机烧伤,为了使飞行员对油门杆操作熟练满意,通过总结油门杆操作特点,引入粗糙集理论,建立了油门杆操作评价定量分析数学模型,并用LabVIEW搜集到的油门杆操作数据的验证。结果表明,该方法能有效对油门杆操作进行评判。
油门杆;粗糙集;操作评判;属性约简
油门杆的操作是飞行员进行模拟训练过程的一个重要环节,飞行员通过驾驶舱人机界面或者外界环境接收相关信息,操作油门杆完成部分任务。一直以来,对于油门杆操作的评判都是依据经验,因此存在较多主观因素。文献[1]面向人机工效对油门杆的操作动作进行了特征分析;文献[2]总结出应连续的、柔和的、在规定的时间内操纵座舱发动机油门操纵杆,禁止粗暴快推、快收座舱发动机油门操纵杆,禁止带拐点快推、快收座舱发动机油门操纵杆,禁止断断续续突然快推、快收座舱发动机油门操作杆。因此操作油门杆的要求可以归结为:柔和而不要粗猛、平稳而不要剧烈。这是一个很模糊的概念,飞行员往往无法把握油门杆操作上柔和和粗猛、平稳和剧烈的界限,只能靠自身感觉体会。
粗糙集(Rough Set)理论是一种处理模糊和不完整信息的数学工具,它不需要提供求解问题所需处理的数据集合之外的任何先验知识,在诸多领域(如工程应用、权重的确定、效能评估等)广泛应用[3-7]。本文通过模拟飞行员操纵油门杆的过程,用LabVIEW软件进行仿真实验,获取各个时间点的数据,并将粗糙集理论运用到评价过程,定量解决实际问题,为建立科学操作油门杆提供一种新的指导思路。
1 建立模型
要实现粗糙集理论在油门杆操作品质评判中的运用,必须把油门杆操作用数学工具描述。将飞行员对油门杆的操作指令转换成电信号传输,用定量解决问题,给油门杆的操作评判提供可靠依据。具体操作步骤如下:
1) LabVIEW是数据采集工具[8]。选取初始指标,模拟油门杆操作,获取初始数据。具体流程如图1所示。
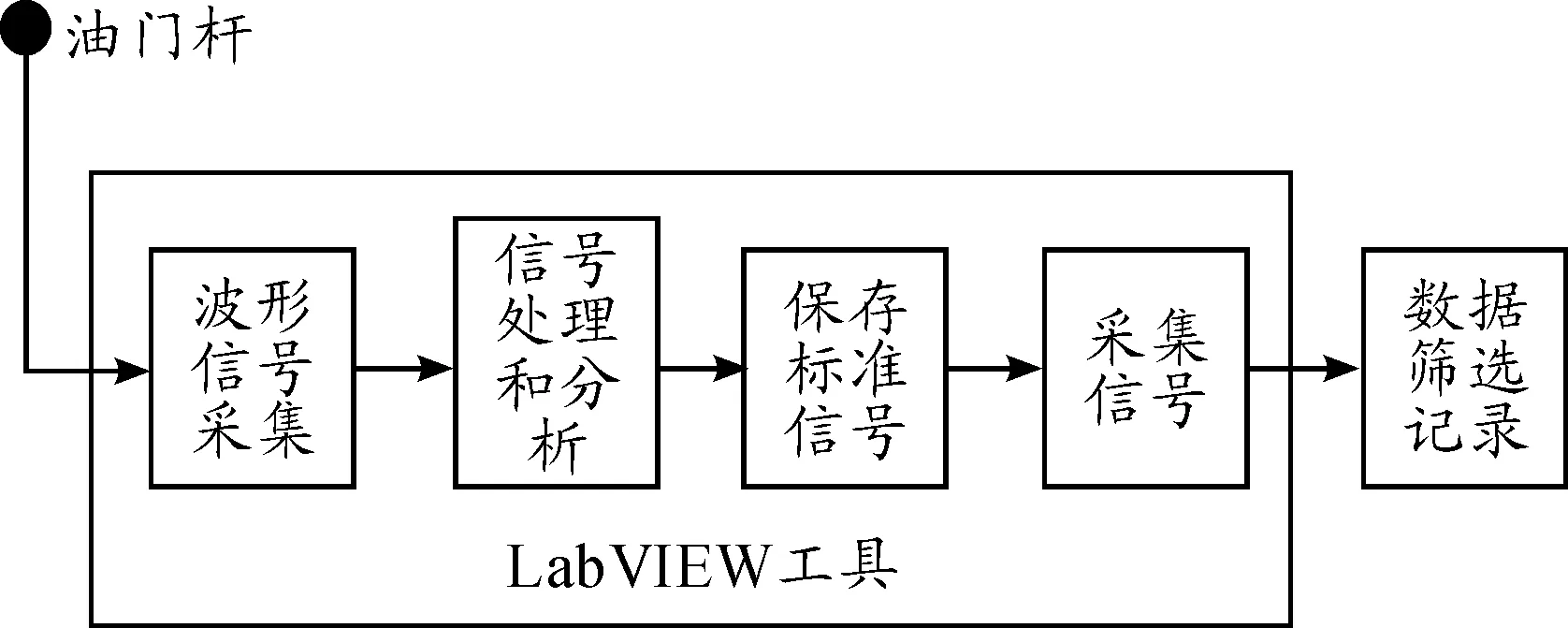
图1 油门杆操作数据采集流程
2) 制定数据离散标准,对获取的初始数据集合进行离散化处理,运用粗糙集理论对初始属性集合进行约简,计算出属性的重要度;
3) 建立评分模型并进行验证。
2 实例分析
2.1 数据获取
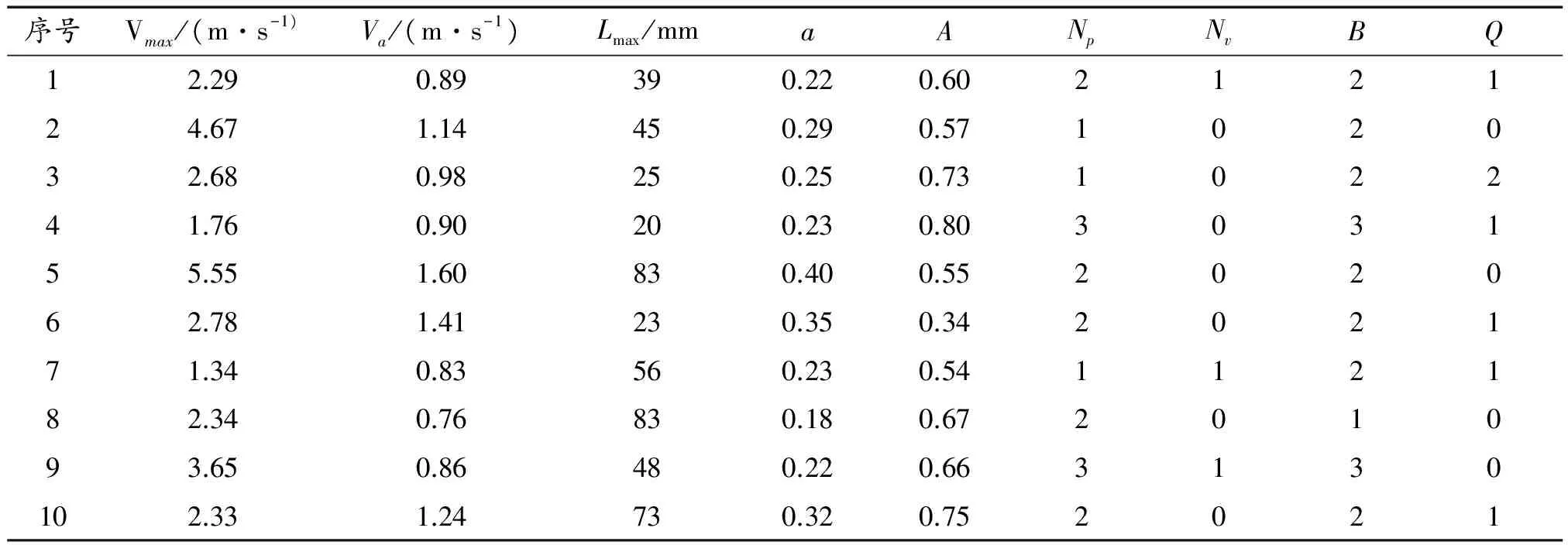
定量分析过程对于数据可靠性的要求较高,本研究结合油门操作经验,选取9项初始指标,分别是单次推杆总时间T、推杆最大速度Vmax、平均速度Va、Vmax出现位置Lmax、导出属性a=Va/Vpmax(其中Vpmax是发动机油门操作速度上限,数值根据具体发动机而定)、油门杆操作准确度A、波峰个数Np、波谷个数Nv和棱角个数B。根据对曲线的判断给出决策属性Q,由专家依据样本曲线评判给出,评判结果分为好、中、差。设每次油门推程L固定为100,采样间隔为5 ms,μ是属性离散值。由T=L/Va知,属性T可以不予考虑。利用LabVIEW软件仿真油门杆操作,对其进行曲线拟合和自动提取预设评判指标的相应数据。如模拟推杆操作,最后得到的初始数据是一组点集,比较粗糙,不适合评判。图1为速度-时间(v-t)的关系图,经多项式拟合后的v-t曲线利于识别并且能够显示推杆过程的特征,如图2所示,由拟合后的曲线可以得到波峰个数Np、波谷个数Nv和棱角个数B,其中曲线凸处为波峰所在点,曲线凹处为波谷所在点,棱角处于曲线转折较为明显的点。油门杆操作准确度A根据飞行员对油门杆操作前后的位置差给定数值。
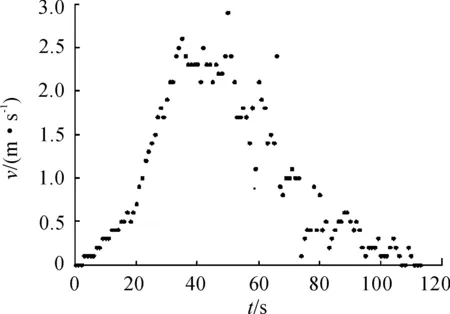
图1 推杆过程的v-t点集
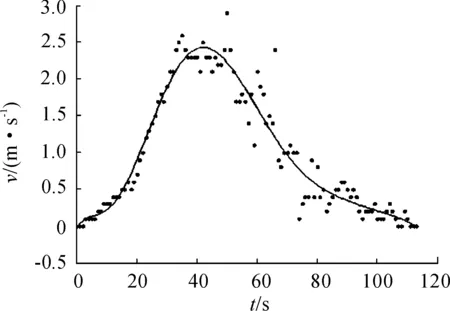
图2 拟合后的v-t曲线
经过模拟飞行员操纵油门杆过程,初步筛选数据,得到10组数据,如表1所示。
表1 初始仿真数据信息
序号Vmax/(m·s-1)Va/(m·s-1)Lmax/mmaANpNvBQ12.290.89390.220.60212124.671.14450.290.57102032.680.98250.250.73102241.760.90200.230.80303155.551.60830.400.55202062.781.41230.350.34202171.340.83560.230.54112182.340.76830.180.67201093.650.86480.220.663130102.331.24730.320.752021
2.2 数据处理
2.2.1 数据离散化
假设表1中10次对油门杆的模拟操作组成集合U={1,2,3,4,5,6,7,8,9,10},条件属性集合R={Vmax,Va,Lmax,a,A,Np,Nv,B}。结合专家意见和知识经验,对初始数据做离散化处理:
1) 推杆最大速度Vmax
① 若Vmax<3,则μ(Vmax)=2;
② 若4>Vmax≥3,则μ(Vmax)=1;
③ 若Vmax≥4,则μ(Vmax)=0。
2) 平均速度Va
① 若Va<0.8,则μ(Va)=2;
② 若1.4>Va≥0.8,则μ(Va)=1;
③ 若Va≥1.4,则μ(Va)=0。
3)Vmax出现位置Lmax
① 若Lmax<33,则μ(Lmax)=2;
② 若65>Lmax≥33,则μ(Lmax)=1;
③ 若Lmax≥65,则μ(Lmax)=0。
4) 导出属性a,a=Va/Vpmax
① 若0.2≥a>0,则μ(a)=2;
② 若0.35≥a>0.2,则μ(a)=1;
③ 若a>0.35,则μ(a)=0。
5) 油门杆操作准确度A
操作油门杆时,操作幅度以速度表为依据,速度表指示有一定的滞后,一个典型的油门操作往往是先将油门推到基准位置,然后观察转速表指示结果,再对油门进行调整。设调整半径为σ,需要调整后的位置为H1,基准位置位置为H2,则:
① 若1≥A>0.7,则μ(A)=2;
② 若0.7≥A>0.3,则μ(A)=1;
③ 若0.3>A≥0,则μ(A)=0。
6) 波峰个数Np
① 若3≥Np>1,则μ(Np)=2;
② 若1≥Np>0,则μ(Np)=1;
③ 若Np≥4,则μ(Np)=0。
7) 波谷个数Nv
① 若2≥Nv>0,则μ(Nv)=2;
② 若Nv=0,则μ(Nv)=1;
③ 若Nv≥3,则μ(Nv)=0。
8) 棱角个数B
① 若B=2、3,则μ(B)=2;
② 若B=0、1,则μ(B)=1;
③ 若B≥4,则μ(B)=0。
9) 决策属性Q
① 若Q好,则μ(Q)=2;
② 若Q中,则μ(Q)=1;
③ 若Q差,则μ(Q)=0。
将初始属性集合离散并约简后得到如表2所示的数据。
表2 离散化数据信息
2.2.2 属性约简
因为每个属性对于系统的重要程度并不一样,如果在决策过程将所有属性都考虑进去,会导致求解过程繁琐和求解结果误差大,因此有必要对属性进行约简。属性约简要求在保证知识库的分类和决策能力不变的条件下,删除不相关或不重要的属性[9]。现做相关计算:
U/ind(R)={{1,7},{2},{3},{4},{5},{6},{8},{9},{10}}
U/ind(R-{Vmax})={{1,7},{2},{3},{4},{5},{6},{8},{9},{10}}=U/ind(R),所以属性Vmax可省;
U/ind(R-{Vmax}-{Va})=U/ind(R),所以属性Va可省;
U/ind(R-{Vmax}-{Va}-{Lmax})≠U/ind(R),所以属性Lmax不可省;
U/ind(R-{Vmax}-{Va}-{a})=U/ind(R),
所以属性a可省;
U/ind(R-{Vmax}-{Va}-{a}-{A})≠U/ind(R),所以属性A不可省;
U/ind(R-{Vmax}-{Va}-{a}-{Np})≠U/ind(R),所以属性Np不可省;
U/ind(R-{Vmax}-{Va}-{a}-{Nv})≠U/ind(R),所以属性Nv不可省;
U/ind(R-{Vmax}-{Va}-{a}-{B})≠U/ind(B),所以属性B不可省;
所以最后约简得到的属性为R={Lmax,A,Np,Nv,B}。
2.2.3 属性重要度
对表3中的数据分别按条件属性和决策属性进行等价类划分:
U/ind(R)={{1,7},{2},{3},{4},{5},{6},{8},{9},{10}}
U/ind(Q)={{6},{1,3,4,8,10},{2,5,7,9}}
进一步做如下划分:
U/ind(R-Lmax)={{1,7},{2,5,6},{4},{8},{9},{3,10}}
U/ind(R-A)={{1,7},{2},{3,6},{4},{8},{9},{5,10}}
U/ind(R-Np)={{1,7,9},{2},{3,4},{5},{6},{8},{10}}
U/ind(R-Nv)={{1,2,7},{3},{4},{5},{6},{8},{9},{10}}
U/ind(R-B)={{1,7},{2},{3},{4},{5,8},{6},{9},{10}}
表3 属性值约简后的油门杆操作评价决策
各条件下属性的决策属性的正域为:
POCR(Q)={2,3,4,5,6,8,9,10}
POCR-Lmax(Q)={4,8,9}
POCR-A(Q)={2,4,8,9}
POCR-Np(Q)={2,5,6,8,10}
POCR-Nv(Q)={3,4,5,6,8,9,10}
POCR-B(Q)={2,3,4,6,9,10}
各条件属性关于决策属性的近似精度为:
各条件属性关于决策属性的重要度为:
经归一化处理得到Lmax、A、Np、Nv和B的权重分别为:0.333、0.267、0.200、0.067、0.133。
2.2.4 评分模型
当某次操作的指标i处于离散区间0时,令该指标得分σi为0;当处于离散区间1时,该指标得分σi为0.6;当处于离散区间2时,该指标得分σi为1;则单次油门杆操作的评分为:
L=(0.333σ1+0.267σ2+0.200σ3+ 0.067σ4+0.133σ5)
2.2.5 模型验证
邀请5位具有实际经验的操作人员对该十组数据进行评判,得出的结果与用粗糙集定量分析得出来的结果相比较,如表4所示。

表4 模型验证数据
3 结论
针对飞行操作存在明显的个体差异,本研究借助LabVIEW记录油门杆模拟操作的数据,建立了油门杆操作评判模型,并引入粗糙集理论定量分析油门杆操作水平,最终将数据反馈给操作人员。操作人员接受反馈结果,针对自身操作不当之处,及时做出相应调整。结果表明,基于粗糙集理论的评判模型能有效对油门杆操作进行评判,为今后进行飞行动作的定量评判提供了一种思路。
[1] 李珍,王海涛,赫云飞.面向人机工效的座舱显控设备布局问题研究[J].飞机设计,2016,36(1):1-7.
[2] 武强,李晓重,陈根生,等.座舱发动机油门杆的操纵对发动机工作影响的分析[C]//中国科学年会.贵阳:[出版社不详],2013.
[3] YEE Leung,FISCHER M M,WU Weizhi Wu,et al.A rough set approach for the discovery of classification rules in interval-valued information systems[J].International Journal of Approximate Reasoning,2008,5(2):233-246.
[4] 鲍新中,刘澄.一种基于粗糙集的权重确定方法[J].管理学报,2009,6(6):729-732.
[5] 高尚.基于Rough集和支持向量机的作战飞机效能评估[J].计算机工程,2006,32(14):184-186.
[6] YE Qing,WU Xiaoping,ZHANG Changhong.An Intrusion Detection System based on evidence theory and Rough Set Theory[J].Journal of Electronics,2009,26(6):777-781.
[7] 郭庆,吴磊.多粒度背景下直觉模糊信息系统的粗糙集及其决策[J].系统工程与电子科技,2016,38(2):347-351.
[8] 黄嘉智.基于LabVIEW的高速数据采集及管理系统设计[D].北京:北京理工大学,2016.
[9] 袁浩.基于量子蚁群算法的粗糙集属性约简方法[J].计算机工程与科学,2010,32(5):82-84.
[10]赵振宇,韩维.飞机着舰轨迹稳定性及飞行员操纵策略研究[J].兵工自动化,2015(11):26-29.
(责任编辑 杨继森)
Quantitative Analysis for Throttle Lever Operation
YE Kun-wua,WEI Si-dongb,BAO Hana
(a. Brigade of Postgraduate; b.Flight Vehicle and Dynamic Department,Aviation University of Air Force, Changchun 130022, China)
The improper operation of throttle lever may cause engine surge or engine burns. According to the characteristics of the throttle lever operation, the rough set was introduced to establish the throttle lever operation quantitative analysis mode and to improve the proficiency in operation and quality of throttle lever operation. Using LabVIEW software, we colected data of throttle lever operation and modified the mode. The result reveals that the method is valid for solving evaluation of lever operation.
throttle lever; rough set; operation evaluation; attribute reduction
2016-11-25;
2016-12-22 作者简介:叶坤武(1992—),男,硕士研究生,主要从事人机环境与工程研究。
10.11809/scbgxb2017.04.032
叶坤武,魏思东,包涵.油门杆操作评判定量分析[J].兵器装备工程学报,2017(4):148-152.
format:YE Kun-wu,WEI Si-dong,BAO Han.Quantitative Analysis for Throttle Lever Operation[J].Journal of Ordnance Equipment Engineering,2017(4):148-152.
V223.1
A
2096-2304(2017)04-0148-05
