基于STUKF的非线性结构系统时变参数识别
2017-04-21杜永峰赵丽洁李万润
杜永峰, 张 浩, 赵丽洁, 李万润
(1. 兰州理工大学 防震减灾研究所, 兰州 730050;2. 兰州理工大学 西部土木工程防灾减灾教育部工程研究中心, 兰州 730050)
基于STUKF的非线性结构系统时变参数识别
杜永峰1,2, 张 浩1, 赵丽洁1, 李万润1
(1. 兰州理工大学 防震减灾研究所, 兰州 730050;2. 兰州理工大学 西部土木工程防灾减灾教育部工程研究中心, 兰州 730050)
针对非线性结构系统时变参数识别问题,传统无迹卡尔曼滤波(Unscented Kalman Filter, UKF)难以有效跟踪结构参数的变化。将强跟踪滤波原理引入无迹卡尔曼滤波,提出一种强跟踪无迹卡尔曼滤波(Strong Tracking Unscented Kalman Filter,STUKF)算法,以识别结构参数的变化。在UKF量测更新后,依据输出残差计算渐消因子矩阵;引入两个渐消因子矩阵实时调整状态预测协方差矩阵,使残差序列强行正交,快速修正结构参数估计值,使STUKF具有对结构参数变化的跟踪能力;此外,为节省计算时间,调整状态预测协方差矩阵后不再进行sigma点采样,保证了算法的高效性。数值分析结果表明,该算法能有效识别非线性结构系统的参数及其变化,并具有较强的抗噪性。
强跟踪滤波;无迹卡尔曼滤波;非线性结构系统;时变;参数识别
土木工程结构在服役期间受到地震等各种作用,其刚度、阻尼等参数常常表现出时变特性,因而考虑参数时变特性的非线性结构系统识别获得越来越多的重视,并发展出一些非线性结构系统时变参数识别方法[1-7],如YANG等提出的自适应追踪技术应用于最小二乘法(Least Square Estimation, LSE)、扩展卡尔曼滤波(Extended Kalman Filter, EKF)所形成的自适应LSE和自适应EKF。然而自适应LSE用于结构系统识别时需要获得结构速度和位移的量测数据,但实际工程中,通常只测量结构的加速度响应;自适应EKF在处理非线性函数时需要进行雅可比(Jacobian)矩阵的计算,求导过程复杂且数值稳定性差,并且对非线性函数的一阶近似精度偏低,特别是对于高度非线性系统,容易出现滤波发散。
JULIER等[8]提出的无迹卡尔曼滤波(Unscented Kalman Filter, UKF)以Unscented变换来近似计算非线性系统状态的后验均值和协方差,从而避免对于非线性函数本身的近似,能以至少二阶精度逼近任何非线性系统,较EKF更适合于强非线性系统,并且不需要计算Jacobian矩阵。鉴于UKF较好的滤波性能,国内外学者开始将其应用于非线性结构系统的参数识别[9-10]。虽然UKF应用于时不变结构系统的参数识别能得到令人满意的结果,但当结构系统参数发生改变时,UKF却无法跟踪参数的变化。BISHT等[11]提出一种自适应UKF方法,仅识别了线性结构系统刚度的变化。谢强等[12]用奇异值分解代替Cholesky分解,用于非线性结构系统参数的变化,但效果欠佳。
强跟踪滤波器(Strong Tracking Filter,STF)对存在模型不确定性的系统具有较好的跟踪性能[13]。本文针对非线性系统时变参数识别问题,在传统无迹卡尔曼滤波中引入强跟踪滤波原理,提出一种强跟踪无迹卡尔曼滤波(Strong Tracking Unscented Kalman Filter, STUKF)方法。该方法中,在状态预测协方差矩阵中引入一种适合于非线性结构系统的渐消因子矩阵,采用简便的次优求解方法得到渐消因子的近似解,自适应调整状态预测协方差矩阵,改善滤波器的跟踪性能,实现非线性结构系统状态估计与时变参数识别。与文献[14]所给方法需要三次采样相比,本方法只需进行一次采样,节省了计算时间。数值模拟表明,该方法能较好地识别非线性结构系统的状态和未知参数,对于刚度、阻尼的突变有较强的跟踪能力,并且对噪声有较强的鲁棒性。
1 基于非线性结构系统的STUKF
1.1 UKF算法
UKF的核心思想是:选取一定数量的采样点(称为sigma点),利用sigma点经非线性函数传递后的结果来计算滤波估计值及协方差矩阵,从而避免对非线性函数的线性化处理。
考虑如下非线性离散系统
(1)
式中:f(·)为非线性状态函数;h(·)为非线性量测函数;xk为n维系统状态向量;zk为m维量测向量;uk-1为n维输入向量;wk-1和vk均为互不相关的高斯白噪声。且有
(2)
式中:qk和Qk分别为系统过程噪声wk的均值向量和非负定方差矩阵;rk和Rk分别为系统量测噪声vk的均值向量和正定方差矩阵;δkj为kronecker-δ函数。状态初始值x0与wk、vk均相互独立,且服从高斯分布。基于非线性系统式(1)的UKF状态估计过程如下
(1) 初始化系统状态统计特性
(3)
(2) 选择采样策略,并计算sigma点ξi,k-1(i=0,1,…,2n)
(4)
(3) 时间更新
γi,k|k-1=f(ξi,k-1,uk-1)+qk-1
(5)
(6)
(7)
(4) 量测更新
χi,k|k-1=h(γi,k|k-1)+rk
(8)
(9)
(10)

(11)
(5) 滤波更新
(12)
(13)
(14)
(15)
式中,λ=α2(n+κ)-n,α为比例缩放因子,对于强非线性系统,通常α取一个比较小的正值,κ为比例参数,一般取κ=3-n,n为状态变量维数。
1.2 基于强跟踪原理的STUKF算法
1.2.1 强跟踪滤波思想
强跟踪滤波思想是在状态预测误差协方差阵Pk|k-1中引入渐消因子,实时调整增益矩阵Kk,使

(16)

(17)

1.2.2 STUKF算法
根据强跟踪滤波原理,在UKF的状态预测误差协方差阵Pk|k-1中引入两个渐消因子矩阵Λk,以保证协方差矩阵的对称性
(18)
依据非线性结构系统状态向量的特点,构造渐消因子矩阵如下:Λk=diag(μ1,k,μ2,k),其中μ1,k=[1,1,…,1]为r维向量,对应状态向量xk中的速度与位移项;μ2,k=[μk,μk,…,μk]为s维向量,对应状态向量xk中的s个未知系统参数。采用次优解法求解渐消因子
(19)
(20)
(21)
(22)
Vk为实际输出残差序列的协方差阵,可由式(23)估算
(23)
式中:0<ρ≤1为遗忘因子,通常取ρ=0.95;εk为输出残差序列。
根据以上描述,STUKF的滤波过程为:①根据式(3)进行系统初始化;②选择采样策略,依据式(4)计算sigma点ξi,k-1(i=0,1,…,2n);
③时间更新
γi,k|k-1=f(ξi,k-1,uk-1)+qk-1
(24)
(25)
(26)
④量测更新
χi,k|k-1=h(γi,k|k-1)+rk
(27)
(28)

(29)
(30)

⑤求渐消因子矩阵,调整Pk|k-1
根据式(19)~式(23)求出渐消因子矩阵,并将其引入状态预测协方差矩阵
(31)
⑥滤波更新
(32)
(33)
(34)
对比UKF滤波过程,可以发现STUKF在量测更新后利用输出残差求解渐消因子矩阵并调整状态预测协方差矩阵Pk|k-1。此外,本方法中的STUKF在调整Pk|k-1后不需再次进行sigma点采样,节省计算时间,更适合实时应用。
2 数值仿真分析
2.1 单自由度非线性结构系统
考虑一个单自由度非线性结构系统受到地震激励,系统的运动方程可以写成
(35)

R(x,z,t)=αkx+(1-α)kz
(36)
(37)
式中:k为结构刚度;α,β,γ,n为非线性参数。本算例中,所用参数的数值如下:m=400.5 kg,c=0.205 kN·s/m,k=20.5 kN/m,α=0.1,β=2,γ=1,n=1;地震激励选用El Centro地震波,持续时间为30 s。


(38)
为应用STUKF进行状态估计与参数识别,将式(38)通过四阶龙格-库塔法离散化[15]。将系统的加速度响应和地震激励作为量测数据,量测方程为

(39)
为验证本文给出的STUKF在非线性结构系统状态估计与时变参数识别中的有效性,假定在t=12 s时结构刚度突然减小为原来的70%,阻尼增大为原来的130%。对模拟的结构加速度响应和地震加速度添加1% RMS,2% RMS,4% RMS三种强度的高斯白噪声,以检验该识别算法对噪声的鲁棒性。结构参数初始估计值及噪声统计特性设置如下
当噪声强度为4%时,结构位移、速度、滞变位移识别结果如图1所示,滞回曲线识别结果见图2。图3对比了1%,2%和4%三种噪声强度下STUKF对于该结构系统未知参数的识别结果。图1、图2表明:在结构刚度、阻尼突变情况下,STUKF对结构位移、速度、滞变位移、滞回曲线的识别值与理论值吻合较好。图3表明:①结构刚度的突变得到有效的跟踪,突变后识别值振荡较小,识别精度较高。且随着噪声增强,刚度识别值的精度及收敛速度下降很小,表现出对噪声较强的鲁棒性。②结构阻尼的突变得到有效跟踪,但效果较刚度稍差。识别值在阻尼突变后出现振荡,但很快又收敛到理论值。随着噪声增强,阻尼的识别精度及收敛速度略有下降。阻尼的识别效果略差于刚度,主要原因是同时识别具有不同数量级的参数,数量级较大的参数在协方差矩阵中会起主要作用,因而会获得更好的识别效果。③STUKF有效识别了不发生突变的非线性模型参数α,β和γ。虽然刚度和阻尼的突变导致其发生短时间振荡,但很快会收敛到理论值。随着噪声的增强,收敛速度和识别精度略有下降。④初始阶段的收敛过程是该算法递推本质的体现,所有参数在5 s内基本收敛到理论值,识别速度较快。总体而言,STUKF能有效识别单自由度非线性结构系统的参数,并能对参数的变化进行有效跟踪。噪声的增强使参数识别效果略有下降,但4% RMS噪声强度下的识别结果精度仍较高,表现出对噪声较强的鲁棒性。
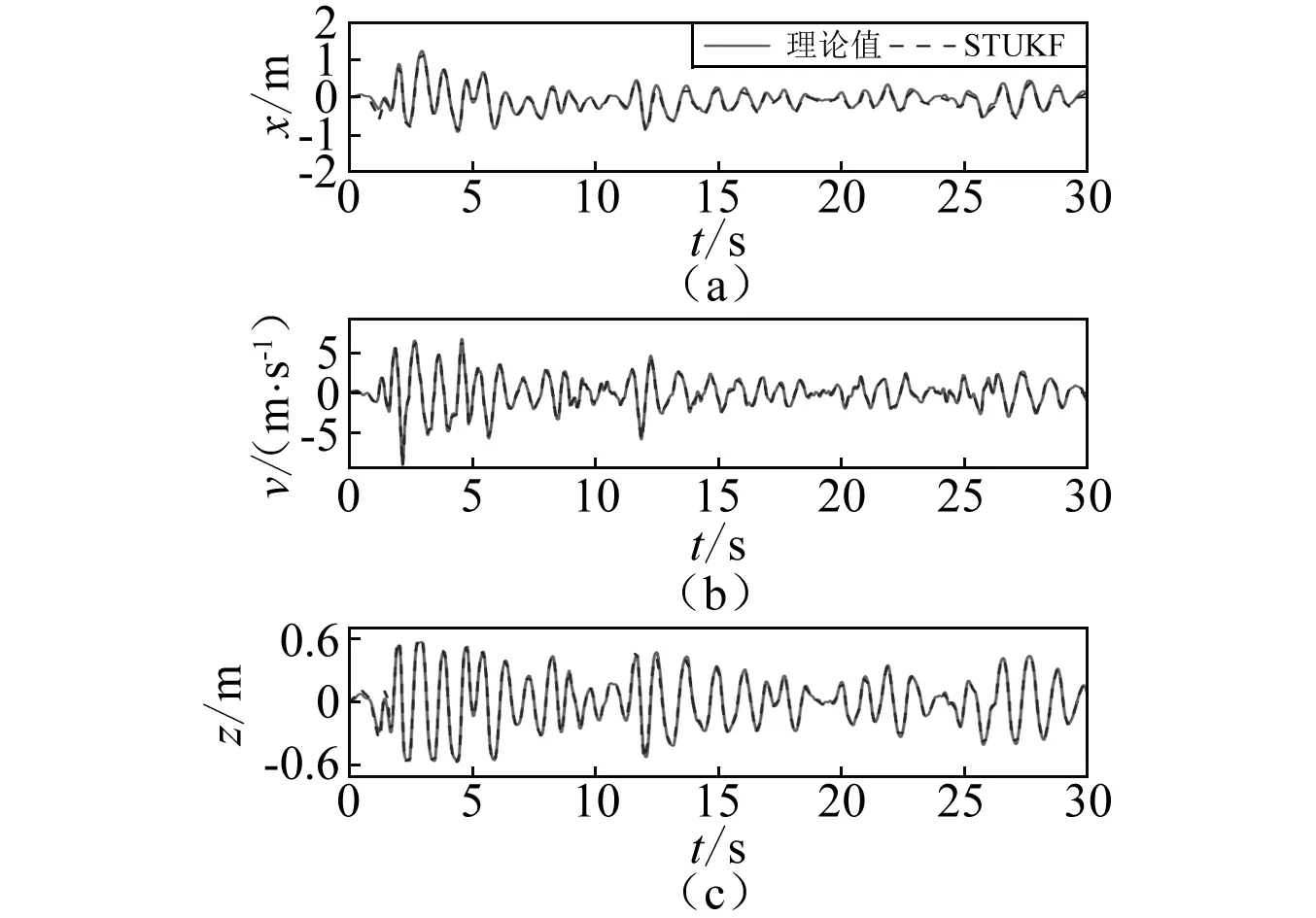
图1 单自由度非线性结构系统位移、速度及滞变位移识别结果,噪声强度4% RMSFig.1 Displacement, velocity and hysteric displacement estimation for SDOF nonlinear structural system, noise level 4% RMS
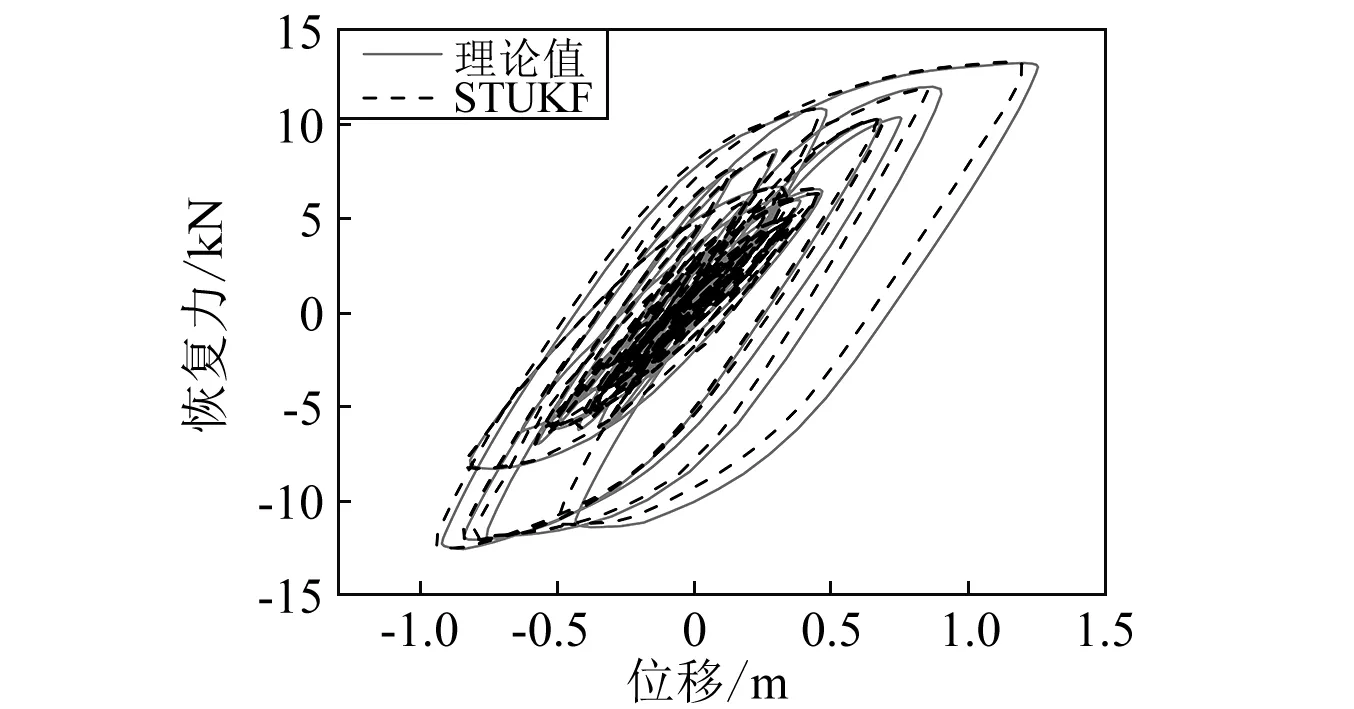
图2 单自由度非线性结构系统滞回曲线识别结果,噪声强度4% RMSFig.2 Hysteric loop estimation for SDOF nonlinear structural system, noise level 4% RMS
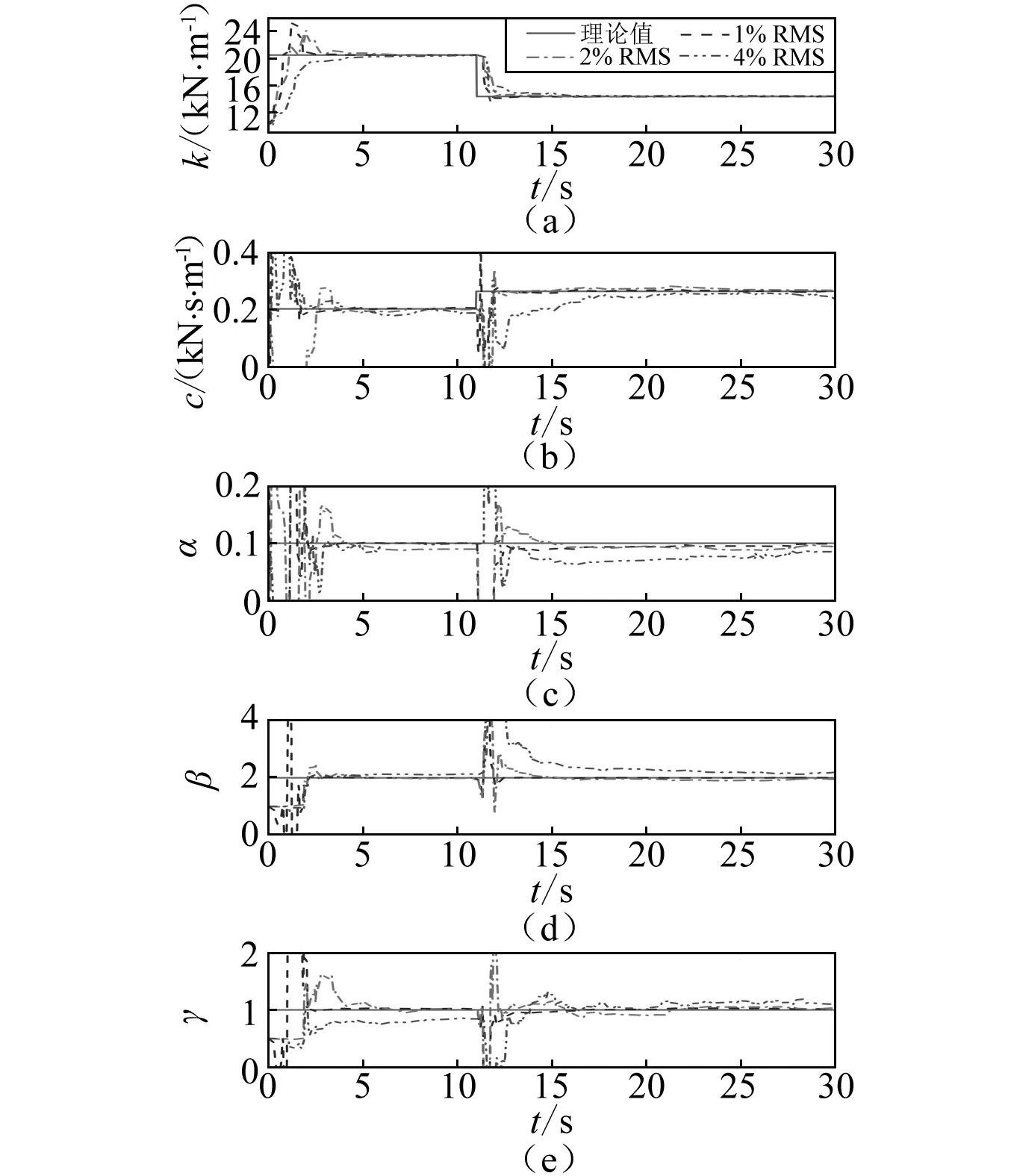
图3 不同噪声强度下单自由度非线性结构系统刚度和阻尼突变时的参数识别结果Fig.3 Parameters identification for SDOF nonlinear structural system with abruptly changed stiffness and damping, noise level 1% RMS,2% RMS and 4% RMS
2.2 三自由度非线性结构系统
考虑一个三自由度非线性结构系统,进一步验证本文给出的STUKF在多自由度非线性结构系统参数识别中的有效性。如图4所示,该结构最下层采用Bouc-Wen迟滞模型,其余各层采用线性层剪切模型表示。受地震激励,其运动方程可写为
(40)
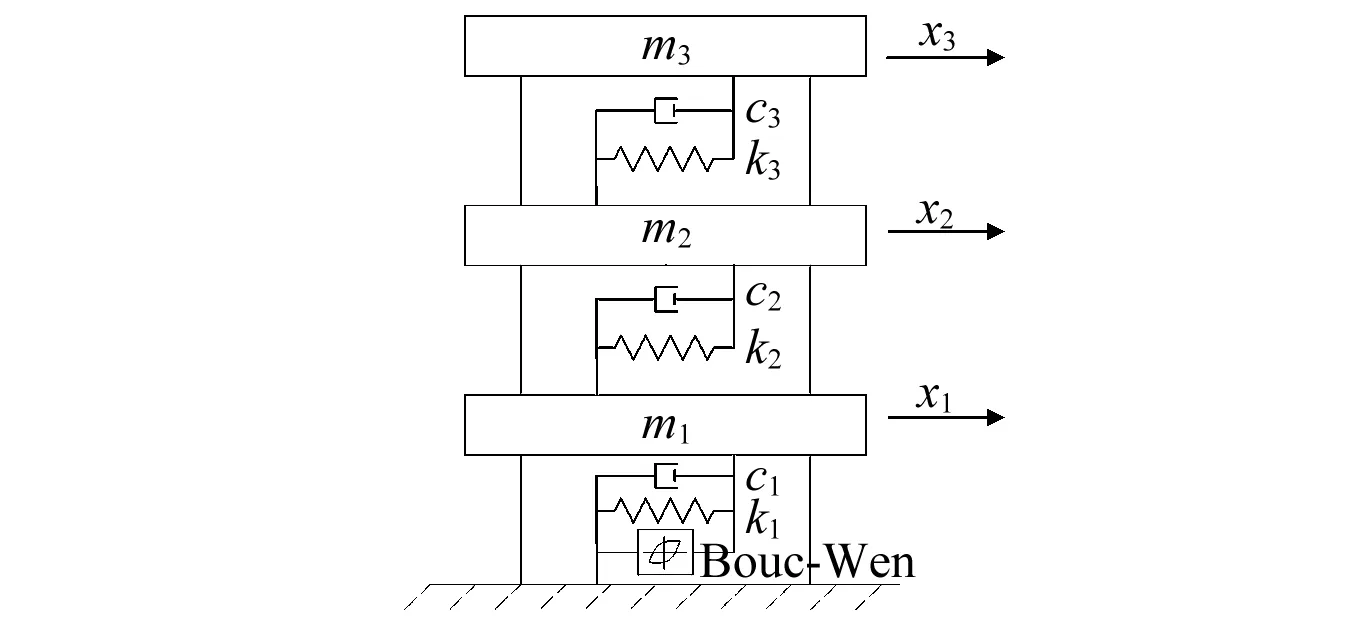
图4 三自由度非线性结构系统示意图Fig.4 Sketch map of three-DOF nonlinear structural system
本算例中m1=450.5 kg,m2=400.5 kg,m3=350.5 kg;k1=20.5 kN/m,k2=k3=23.5 kN/m,c1=0.205 kN·s/m,c2=c3=0.255 kN·s/m;α=0.1,β=2,γ=1,n=1;地震激励选用El Centro地震波,持续时间为30 s。


(41)
将该结构系统各层的加速度响应及地震激励作为量测数据,量测方程可以写成

(42)
在模拟的量测加速度响应和地震加速度中加入1% RMS的高斯白噪声。为验证STUKF在多自由度非线性结构系统中的有效性,假定t=12 s时,结构一层刚度从k1=20.5 kN/m突然减小到k1=14.35 kN/m,二层刚度从k2=23.5 kN/m突然减小到k2=16.45 kN/m,三层刚度从k3=23.5 kN/m突然减小到k3=16.45 kN/m。结构各层位移、速度及滞变位移如图5所示,滞回曲线如图6所示。结构参数的识别结果如图7所示。
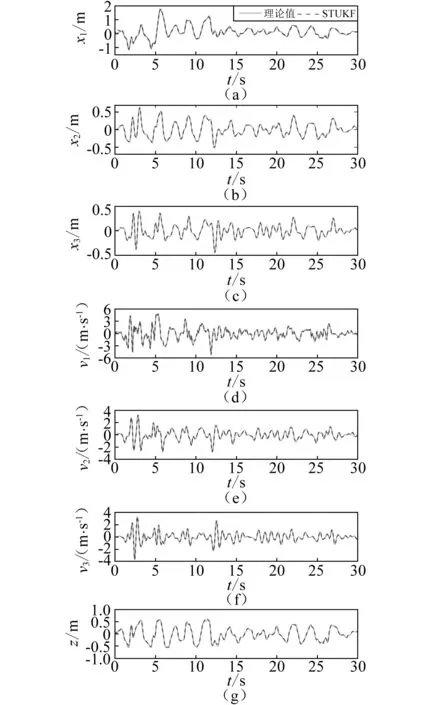
图5 三自由度非线性结构系统各层位移、速度及一层滞变位移识别结果Fig. 5 Displacement, velocity and hysteric displacement estimation for three-DOF nonlinear structural system
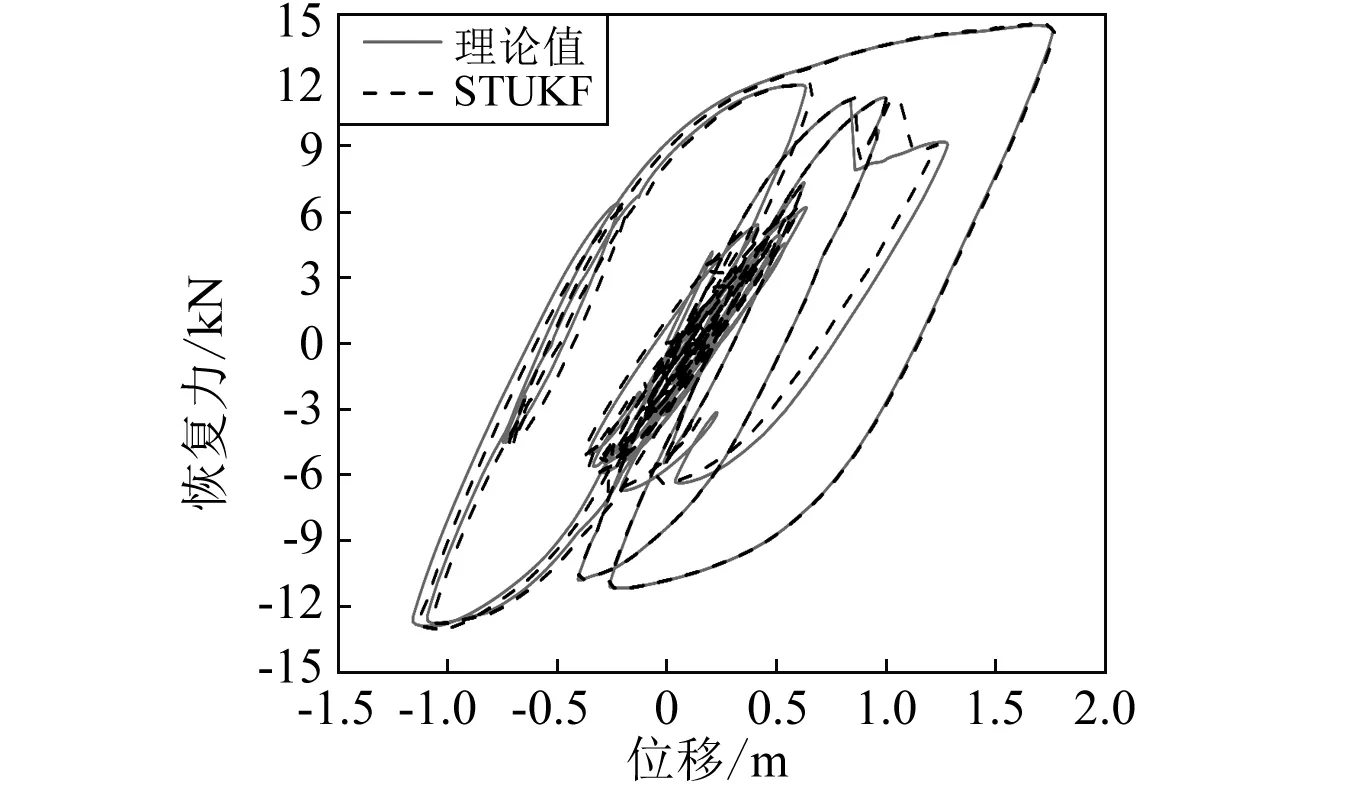
图6 三自由度非线性结构滞回曲线识别结果Fig.6 Hysteric loop estimation for three-DOF nonlinear structural system
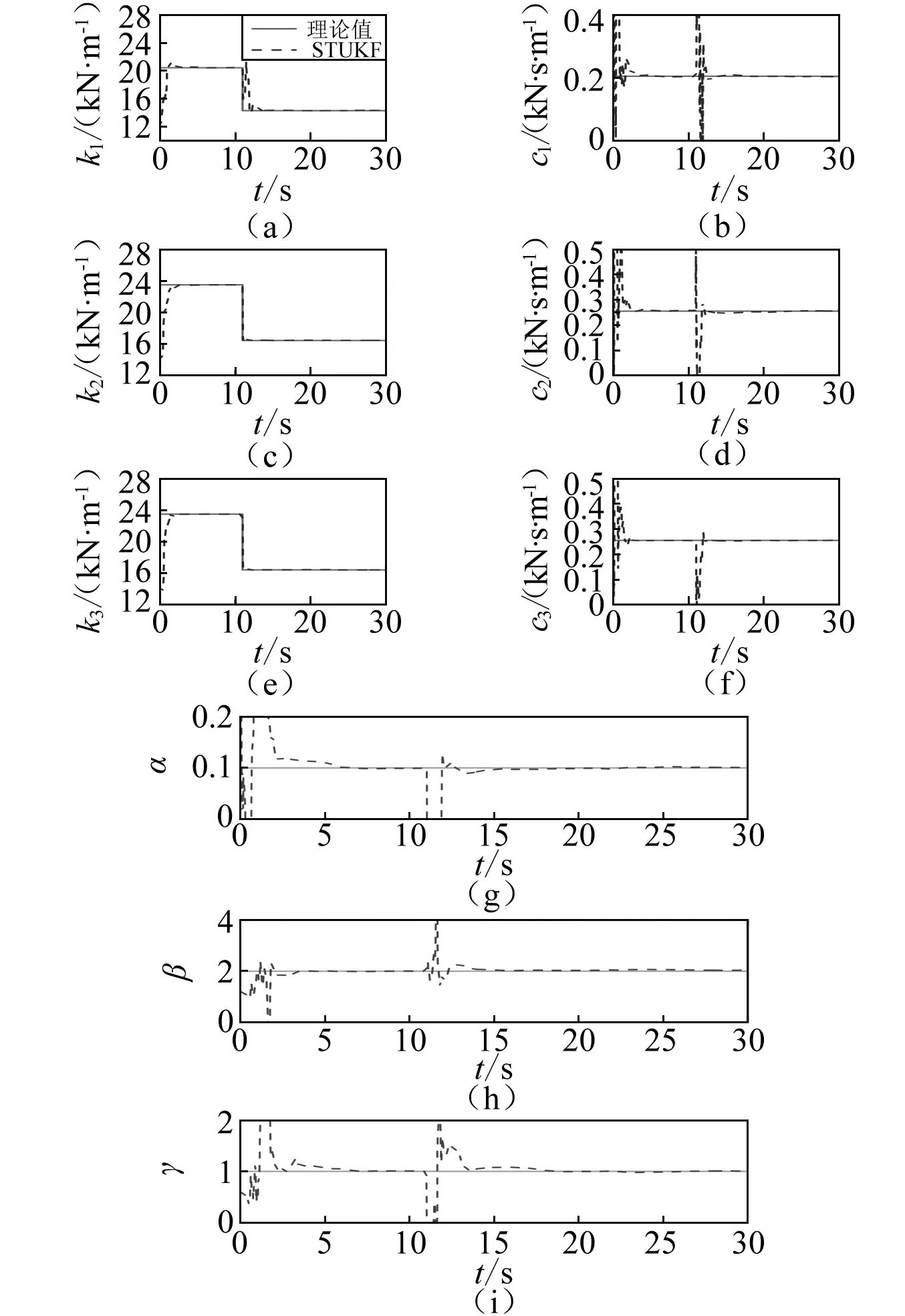
图7 三自由度非线性结构系统各层刚度均突变时的参数识别结果Fig.7 Parameters identification for three-DOF nonlinear structural system with abruptly changed stiffness of all layers
由图5、图6、图7可知:本文提出的STUKF:①较好地识别了各层的位移、速度及一层滞回曲线;②有效识别了各层刚度的突变,并且对比刚度突变后线性层(二层、三层)与非线性层(一层)的识别结果可以发现,非线性层刚度在突变时发生了振荡,而线性层刚度未发生振荡,识别结果较非线性层更为理想;③结构阻尼及非线性模型参数α,β和γ,受刚度突变的影响发生了短时振荡,但其仍会迅速收敛到理论值;④所有参数在5 s内基本收敛到理论值,识别速度较快。总体而言,对于三自由度非线性结构系统,STUKF能以较高的精度有效地识别结构各参数及其变化,并估计结构各层位移、速度及滞回曲线。
3 结 论
针对非线性结构系统时变参数识别问题,本文将强跟踪滤波原理引入UKF,提出了一种STUKF算法,以解决UKF无法跟踪参数变化的问题。数值模拟表明,STUKF能较好地识别非线性结构位移、速度和滞回曲线,并能有效跟踪结构参数及其变化。该算法在具有较大量测噪声时仍具有较高的识别精度,但噪声对识别值的收敛速度略有影响。对于多自由度非线性结构系统,该算法仍然具有较好的识别能力。本文通过数值模拟验证了STUKF在非线性结构系统时变参数识别中的有效性,其在工程中的应用还有待进一步试验验证。
[ 1 ] 雷鹰,周欢.有限观测下的结构损伤实时在线诊断[J].振动与冲击,2014,33(17):161-166. LEI Ying, ZHOU Huan. On-line structural damage detection based on limited response observations[J]. Journal of Vibration and Shock,2014,33(17):161-166.
[ 2 ] 丁勇,许国山,林琦,等.基于时-频域信息的结构系统识别方法研究[J].土木工程学报,2012,45(增刊1):15-19. DING Yong, XU Guoshan, LIN Qi, et al. Structural system identification based on frequency-time domain information[J]. China Civil Engineering Journal,2012,45(Sup1):15-19.
[ 3 ] LIN J W, RAIMONDO B, SMYTH A W, et al. On-line identification of nonlinear hysteretic structural systems using a variable trace approach[J]. Earthquake Engineering and Structural Dynamics,2001,30(9):1279-1303.
[ 4 ] YANG J N, LIN S. On-line identification of nonlinear hysteretic structures using an adaptive tracking technique[J]. International Journal of Nonlinear Mechanics,2004,39(9):1481-1491.
[ 5 ] 尹强,周丽.基于遗传优化最小二乘算法的结构损伤识别[J].振动与冲击,2010,29(8):73-77. YIN Qiang, ZHOU Li. Structural damage identification based on GA optimized least square estimation[J]. Journal of Vibration and Shock,2010,29(8):73-77.
[ 6 ] YANG J N, LIN S, HUANG H, et al. An adaptive extended Kalman filter for structural damage identification[J]. Journal of Structural Control and Health Monitoring,2006,13(4):849-867.
[ 7 ] 周丽,吴新亚,尹强,等.基于自适应卡尔曼滤波方法的结构损伤识别实验研究[J].振动工程学报,2008,21(2):197-202. ZHOU Li, WU Xinya, YIN Qiang, et al. Experimental study of an adaptive extended Kalman filter for structural damage identification[J]. Journal of Vibration Engineering,2008,21(2):197-202.
[ 8 ] JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control,2000,45(3):477-482.
[ 9 ] WU Meiliang, SMYTH A W. Application of the unscented Kalman filter for real-time nonlinear structural system identification[J]. Structural Control and Health Monitoring,2007,14(7):971-990.
[10] XIE Zongbo, FENG Jiuchao. Real-time nonlinear structural system identification via iterated unscented Kalman filter[J]. Mechanical Systems and Signal Processing,2012,28(2):309-322.
[11] BISHT S S, SINGH M P. An adaptive unscented Kalman filter for tracking sudden stiffness changes[J]. Mechanical Systems and Signal Processing ,2014,49(1/2):181-195.
[12] 谢强,唐和生,邸元.SVD-Unscented卡尔曼滤波的非线性结构系统识别[J].应用力学学报,2008,25(1):57-61. XIE Qiang, TANG Hesheng, DI Yuan. SVD-unscented Kalman filter for nonlinear structural system identification[J]. Chinese Journal of Applied Mechanics,2008,25(1):57-61.
[13] 周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000.
[14] 王小旭,赵琳,夏全喜,等.基于Unscented变换的强跟踪滤波器[J].控制与决策,2010,25(7):1063-1068. WANG Xiaoxu, ZHAO Lin, XIA Quanxi, et al. Strong tracking filter based on unscented transformation[J]. Control and Decision,2010,25(7):1063-1068.
[15] VOSS H U, TIMMER J, KURTHS J. Nonlinear dynamical system identification from uncertain and indirect measurements[J]. International Journal of Bifurcation and Chaos,2002,14(6):1905-1933.
Time-varying parametric identification of nonlinear structural systems based on STUKF
DU Yongfeng1,2, ZHANG Hao1, ZHAO Lijie1, LI Wanrun1
(1. Institute of Earthquake Protection and Disaster Mitigation, Lanzhou University of Technology, Lanzhou 730050, China;2. Western Center of Disaster Mitigation in Civil Engineering of Ministry of Education, Lanzhou University of Technology, Lanzhou 730050, China)
Traditional unscented Kalman filter (UKF) cannot track the changed parameters of nonlinear structural systems. Based on the strong tracking filter principle,a strong tracking unscented Kalman filter (STUKF) method was put forward to identify the time-varying parameters of nonlinear structural systems. Firstly, the fading factor matrix was calculated with output residuals after the measurement update of UKF. Secondly, two fading factor matrices were introduced to adjust the predicted state covariance matrix in real time, the residual sequence was made to be orthogonal and the estimated values of structure parameters were updated rapidly, thus STUKF was made to be capable of tracking the changes of structure parameters. Furthermore, the computational efficiency was improved by taking no sigma points sampling after adjusting the predicted state covariance matrix. Numerical simulation results demonstrated that the proposed method can effecfively identify parameters and changes of nonlinear structural systems, and it has a stronger anti-noise capability.
strong tracking filter;unscented Kalman filter;nonlinear structural systems;time-varying;parameter identification
国家自然科学基金(51578274;51568041);教育部长江学者创新团队项目(IRT13068);甘肃省青年科技基金计划(2014GS03277)
2015-10-09 修改稿收到日期: 2016-03-07
杜永峰 男,博士,教授,博士生导师,1962年生
N945.14;TB122
A
10.13465/j.cnki.jvs.2017.07.026
