基于EOF的ARGO浮标声速剖面重构
2017-04-20李洪超赵柯柯师军良
李洪超,赵柯柯,师军良
(黄河水利职业技术学院,河南 开封 475004)
基于EOF的ARGO浮标声速剖面重构
李洪超,赵柯柯,师军良
(黄河水利职业技术学院,河南 开封 475004)
利用EOF可以对不完整的ARGO浮标声速剖面进行重构,得到完整的声速剖面。分析了ARGO浮标声速数据预处理方法和剖面重构方法,探讨了不同深度段剖面数据对重构结果的影响。将EOF方法与内插方法比较,得出EOF方法具有较强的实用性和较高的重构精度的结论。
EOF;ARGO浮标;声速剖面;剖面重构;重构精度
0 引言
声音信号在水中良好的传播特性使得水声成为水下定位、导航、探测等的主要信号。水下GPS定位系统是利用水声信号进行定位的系统。通常,它将水中的声速看成不变量 (即取一区域内声速的平均值作为该区域内的声速值)[1]。实际上,声速在水平方向上和垂直方向上都是变化的。对声速不变的假设使得水下GPS测量结果产生较大的误差。因此,如何准确确定海水声速的大小,是进行水下精密定位的关键。
海水声速测量的传统方法主要有2种[2]:(1)先测量海水的电导率、温度、深度(CTD),再利用海水的经验公式反算声速。(2)直接测量。这2种方法都不可能同时获取大量的声速剖面数据。随着ARGO全球海洋观测网的发展,获取海量声速剖面数据成为可能[3~7]。在ARGO浮标测量过程中,由于各种外部原因或者浮标本身的原因,一些浮标测量的温度、盐度、压剖面数据只有部分是可用的,致使计算得到的声速剖面数据也是部分可用。然而,在实际应用中,往往需要该剖面的完整数据。于是,有学者提出了利用部分ARGO浮标声速剖面数据对整个剖面进行重构的命题。Davis[8]证明:在最小均方差意义下,经验正交函数(Empirical Orthogonal Function,简称EOF)是描述声速剖面最有效的基函数。通常,2~3个这样的基函数就可以精确地表达任一声速剖面。国内一些学者关于海洋声速场EOF的研究进一步证明了应用EOF方法研究海洋声速场的可行性[9~14]。张镇迈[15]等利用有限深度声速数据重构全海深声速剖面,验证了基于EOF方法进行声速剖面重构的可行性。笔者在此基础上,探讨了利用不同深度段的部分声速剖面进行重构的方法,并与内插方法进行了比较,验证EOF方法重构声速剖面的高精度性和应用的简便性。
1 试验数据与重构方法
1.1 试验数据
试验区域为北纬21°~23°,东经123°~126°。试验所用数据为2003~2010年 (其中2005年和2007年没有数据)每年10月份ARGO浮标测量的温度、盐度和压力数据。去除一些不合格(剖面太浅)的剖面数据,本试验共选择了56个剖面。其中,55个剖面作为已知数据,选用1个剖面(22.3°N,124.5°E)用来检测重构精度。试验统一选择剖面的范围为海面至海深1 000 m。在试验区域内,ARGO剖面分布如图1示。图中,“Δ”表示检测浮标。
1.2 ARGO数据预处理
(1)根据公式(1),将ARGO浮标的压强数据转化为深度数据。

式中:p为压强,kPa;D为水深,m。
(2)利用Medwin经验公式来求解相应的声速剖面,如式(2)所示。
式(2)的适用范围为:0℃≤T≤35℃,0℃≤S≤45‰,0℃≤D≤1 000 m。

式中:C为声速,m/s;T为温度,℃;S为盐度,1‰。
(3)将计算的声速剖面内插成等间距剖面。实验利用三次样条函数将声速内插成间隔为10m、共100层数据。将内插后的剖面数据当作“实测”的剖面数据。
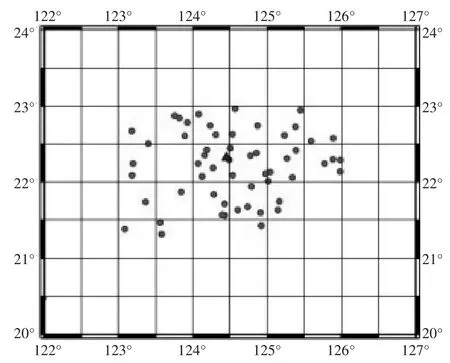
图1 实验海域内浮标分布图Fig.1 Buoy distribution in test sea
1.2 剖面重构方法
假设某区域海水内有N个声速剖面数据,每个剖面由M个离散深度上的声速值组成,则该区域的声速剖面矩阵C如式(3)所示,其协方差矩阵R如式(4)所示。

对RMM进行特征值分解,得到式(6)。

式中:ΛMM=为RMM的特征值组成的对角矩阵。
假设λ1>λ2>…>λM,则与特征值相对应的特征向量PMM=PMM的第一列为与λ1相对应的特征向量,以此类推。矩阵PMM即为所求的经验正交函数所对应的矩阵向量。令fk(z)=[ek1ek2… ekM]T,则PMM=[f1(z) f2(z)… fM(z)]。
文献[9]表明,取前几阶经验正交函数就可以较精确地表示实际的声速剖面。如果取前k阶经验正交函数,则区域内任意已知剖面均可表述为式(7)。
令a=[a1a2… ak]T,可利用区域内部分剖面按式(7)求出系数矩阵a,再将系数矩阵a反代入式(7),即可重构出整个声速剖面。
前k阶经验正交函数对区域的累计贡献率可表示为式(8)[16]。

一般情况下,如果w(k)的值大于或等于90%,利用前k阶经验正交函数就能很好的表示该区域的声速变化。
2 实验结果及分析
2.1 不同深度段数据对重构结果的影响
利用实验区域内55个已知浮标,求得该区域的经验正交函数EOF。为方便表达,仅列出前三阶EOF,如图2所示。
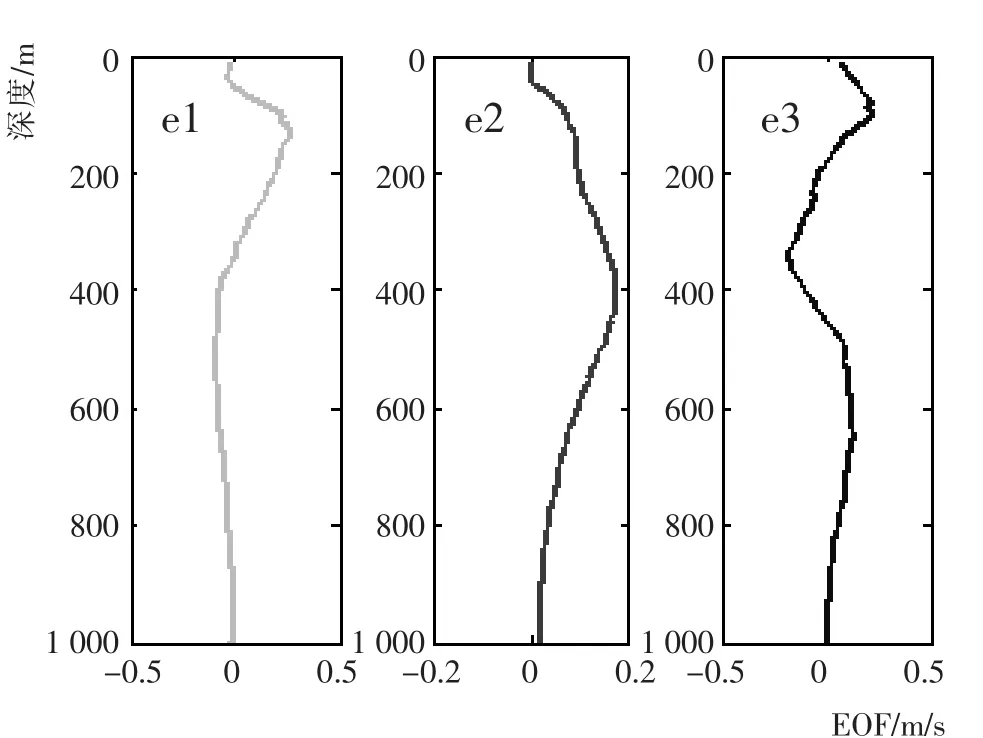
图2 前三阶EOFFig.2 First three order EOF
利用式 (8)计算出前三阶EOF对区域的贡献率,约为96%。因此,利用前三阶EOF对该区域内的声速剖面进行重构,能够得到较好的精度。
分别选取上段(0~300 m)、中段(310~600 m)和下段 (610~900 m)3个剖面数据作为已知部分剖面数据,对位置(22.3°N,124.5°E)处声速剖面进行重构。重构结果如图3所示(实线为实测的声速剖面,虚线为重构的声速剖面)。
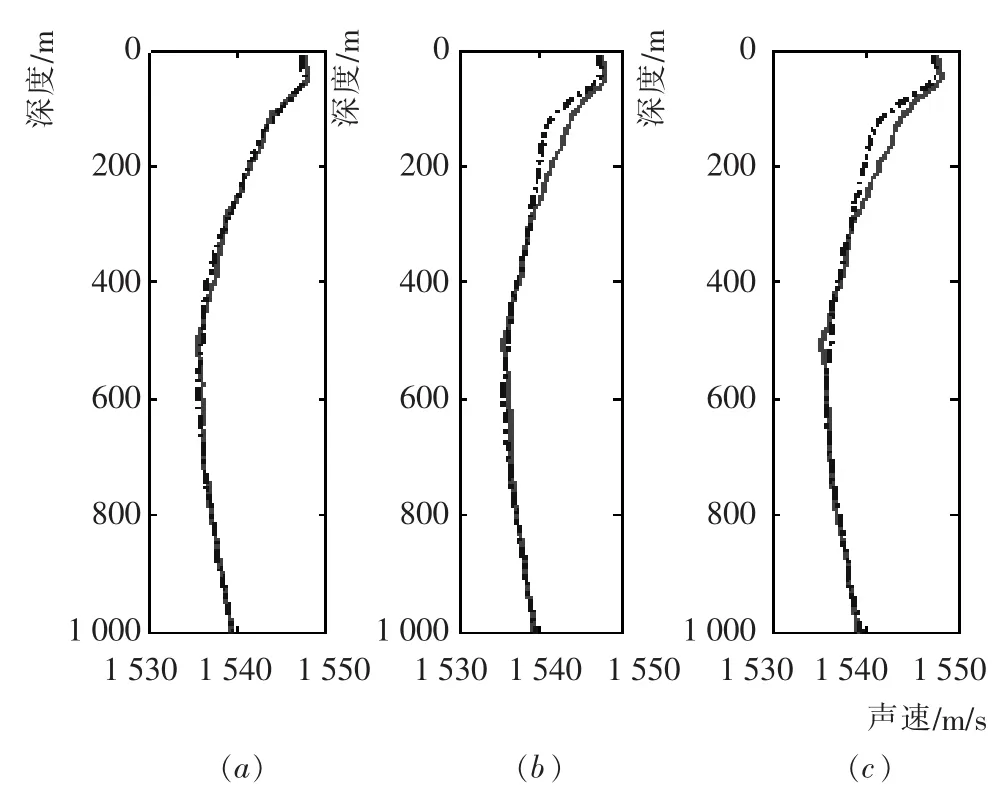
图3 利用不同段观测数据进行重构的结果Fig.3 Reconstruction results of different observation data
经计算,利用上段数据重构(如图a所示)的中误差为0.27 m/s,利用中段数据重构(如图b所示)的中误差为0.78 m/s,利用下段数据重构(如图c所示)的中误差为0.75 m/s。图4(a)(b)(c)分别为利用上、中、下段3个剖面数据进行重构的残差图。
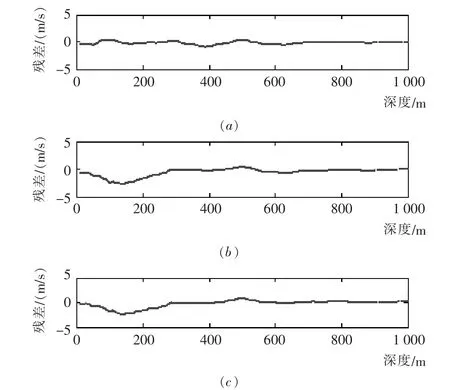
图4 利用不同段观测数据进行重构的残差图Fig.4 Reconstruction residual of different observation data
由图4可以看出:(1)在水深150m左右处,利用3段数据重构的精度都较差。其中,图(a)出现较大的正偏差,图(b)和图(c)出现较大的负偏差。(2)在水深500 m左右处,3幅图均出现较大的正偏差。(3)残差曲线变化趋势较为一致(除了150 m左右),即重构的结果存在着系统偏差。系统偏差可能是由于选取较少阶EOF对剖面进行重构而造成部分信息损失引起的。(4)下层海水声速的重构效果较好,上层海水声速的重构效果稍差。这可能是由于上层海水中海洋要素(如温度、盐度等)变化较为复杂而下层海水海洋要素较为稳定所致。
2.2 EOF方法与内插方法的比较
重构区域海水某处的声速剖面时,较常用的方法是利用目标位置周围的若干个已知声速剖面数据,通过内插得到所需数值。实验采用反距离加权插值法,权函数选择d-2(d为距离),利用待求位置(22.3°N,124.5°E)周围4个已知的ARGO声速剖面数据进行内插,得到该位置所处的声速剖面。将实验区域的已知声速剖面内插成100层以10 m为间距的数据。在每一层数据上,均利用反距离加权法进行内插,即可得到待求的声速剖面,结果如图5所示。经计算,采用内插方法重构声速剖面的中误差为0.63 m/s。由图5可以看出,800 m以下的内插精度较高,800 m以上的内插精度稍差,插值的精度总体上与EOF方法的重构精度相当。
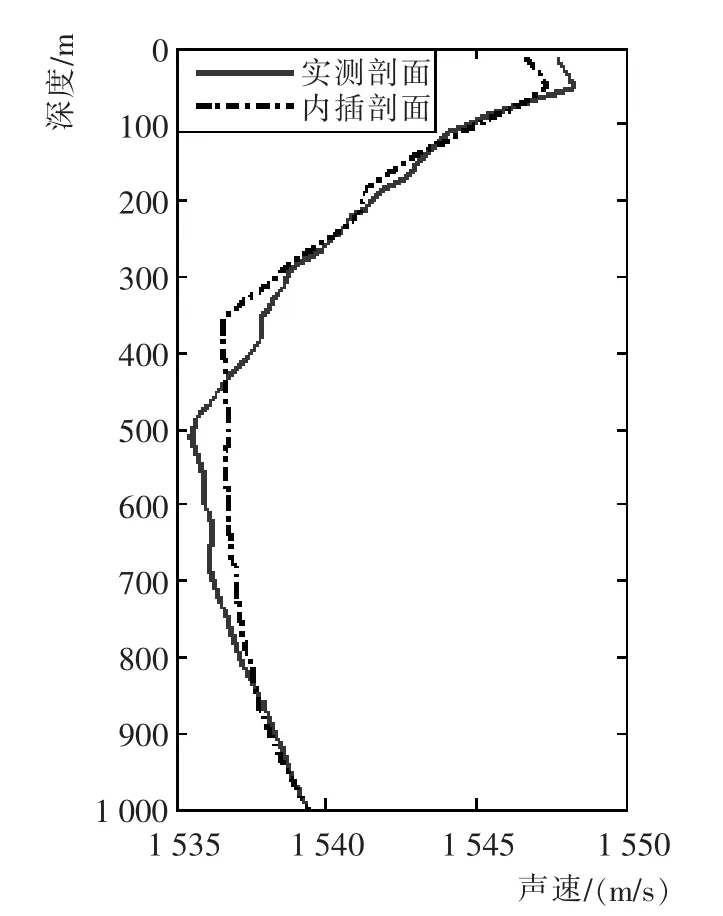
图5 内插方法重构的声速剖面图Fig.5 Sonic speed profile of interpolation
将用内插方法与用EOF方法重构的声速剖面残差进行比较,如图6所示。
由图6可以看出,在上层海水(0~500m)范围内,内插得到的剖面误差较小;在下层海水(500~1000 m)范围内,利用EOF方法重构的精度较高。
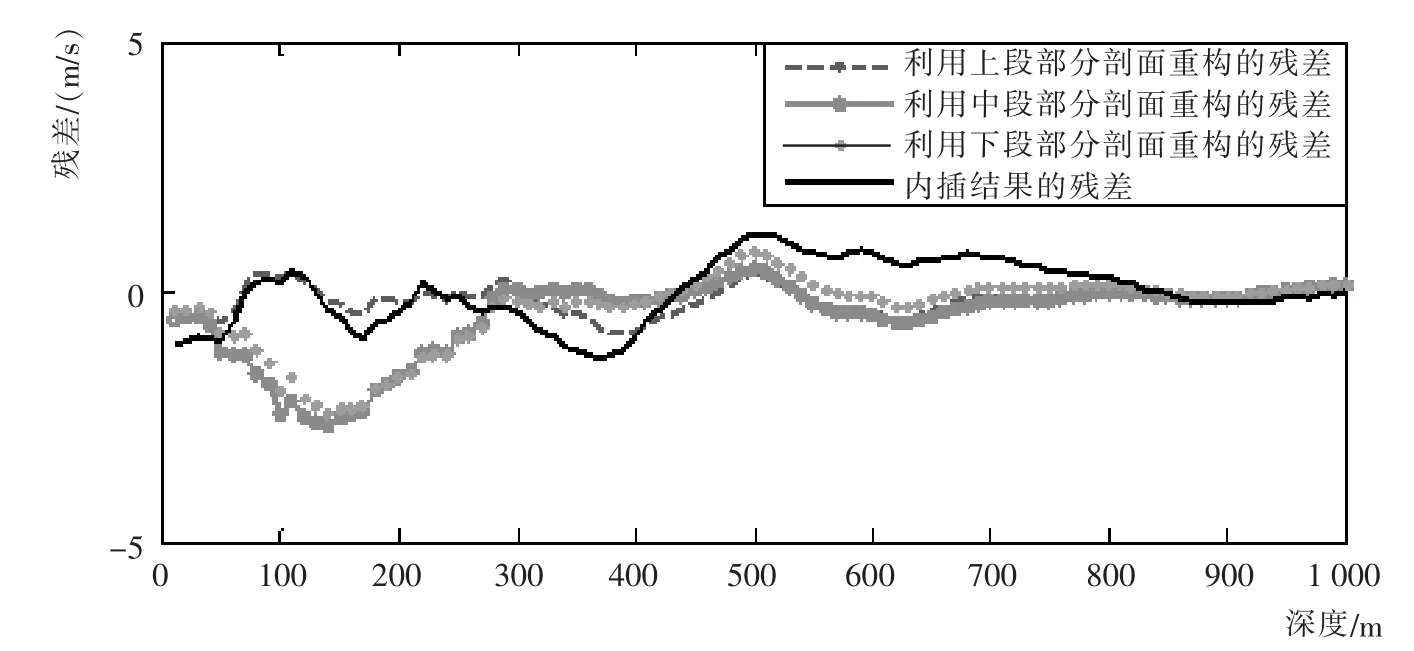
图6 基于EOF重构与距离加权内插的残差比较Fig.6 Residual comparison of EOF reconstruction and distance weighting interpolation
应用内插方法求解某位置处的声速剖面时,需要利用该位置周围已知的浮标剖面数据。因此,用内插法计算试验区域内任意位置处的声速剖面时,需要储存整个区域内的已知声速剖面数据。而且,内插不同位置处的剖面需要不同的已知数据,计算较为复杂。基于EOF方法进行剖面重构,仅需存贮该区域内的前几阶EOF数据,就可重构出区域内任意位置处的声速剖面。同时,重构区域内任意位置处的声速剖面都利用同样的EOF数据,不同的仅是系数矩阵。因此,与内插方法相比,用EOF方法对声速剖面进行重构显得更为方便,而且还有较高的重构精度。
3 结语
利用EOF对ARGO浮标声速剖面进行重构时,使用上段部分剖面数据得到的重构精度较高。与内插方法相比,EOF方法具有较高的重构精度,而且EOF方法仅需要存储较少的数据,就可重构出区域内任意位置处的声速剖面,从而可以避免海量数据的存贮问题。随着ARGO浮标在全球海洋上获得的温度、盐度剖面数据越来越丰富,使用EOF方法重构的精度也将进一步提高。
[1] 蔡艳辉.差分GPS水下定位系统集成关键技术研究[D].辽宁:辽宁工程技术大学,2007.
[2] 于连生.毫米级高精度海水声速测量技术研究[J].海洋技术,2003,22(3):63-64.
[3] 许建平,刘增宏.中国ARGO大洋观测网试验[M].北京:气象出版社,2007:112-130.
[4] 杨胜龙,周甦芳,崔雪森,等.ARGO数据研究应用现状与发展趋势[J].海洋渔业,2007,29(4):355-358.
[5] 朱伯康,许建平.国际ARGO计划执行现状剖析[J].海洋技术,2008,27(4)∶102-114.
[6] 金国栋,张永刚,张旭,等.基于ARGO数据的海洋声场特征分析及其对作战的影响[J].舰船电子工程,2008,28 (11):176-179.
[7] Dean Roemmich,The argo steering team.Argo the challenge ofcontinuing 10 years ofprogress[J].Oceanography,2009,22(3):46-55.
[8] Russ E·Davis.Predictability of Sea Surface Temperature and SeaLevelPressure Anomaliesoverthe North Pacific Ocean[J].1976,6(3):249-266.
[9] 周士弘,张茂有,周日鹏.海洋声速场的经验正交函数描述及声速剖面预报[J].海洋通报,1999,18(5):27-34.
[10]沈远海,马远良,屠庆平,等.浅水声速剖面用经验正交函数表示的可行性研究[J].应用声学,1999,18(2):21-25.
[11]沈远海,马远良,屠庆平.声速剖面的分层正交经验函数表示[J].西北工业大学学报,2000,18(1):90-93.
[12]韩梅,魏亮,周艳霞.改进型经验正交函数海洋声速剖面预报方法[J].海洋科学,2000,33(1):30-33.
[13]张旭.台湾以东海域声速剖面序列的EOF分析[J].海洋科学进展,2010,28(4):498-505.
[14]张镇迈,李整林,戴琼兴.南海海域水温重构经验正交基的选取[J].海洋物理及观测技术,2007,26(5):228-230.
[15]张镇迈,李整林,戴琼兴.利用有限深度声速数据重构全海深声速剖面[J].声学技术,2008,27(5)∶106-107.
[16]施能.气象科研及预报中的多元分析方法[M].北京:气象出版社,2002:91-128.
[责任编辑 杨明庆]
P715.2
B
10.13681/j.cnki.cn41-1282/tv.2017.02.009
2017-01-15
黄河水利职业技术学院校内基金项目:GRACE重力卫星反演黄河流域质量变化关键技术研究(2015KXJS007)。
李洪超(1985-),男,河南永城人,助教,硕士,主要从事高校测绘工程教学与研究工作,研究方向为卫星重力学、海平面变化。
