基于UG的凸轮机构运动分析仿真
2017-04-18夏雨露
夏雨露
摘要:本文介紹了以UG软件为设计平台建立一个凸轮机构模型,同时对其进行运动仿真分析,阐述了运动仿真的实现过程,展示凸轮机构真实的运动状态,其运动的结果用图表直观的反映出来, 从这些图表中可以分析出凸轮设计的合理性,为凸轮机构的改进设计提供一些参考。
Abstract: This paper introduces a model of cam mechanism based on UG software, analyzes its movement simulation, describes the realization process of motion simulation and shows the real motion of cam mechanism. The results of the motion are directly reflected in the chart. From these charts, we can analyze the rationality of cam design to provides some references for the improvement of cam mechanism.
关键词:UG;凸轮机构;运动仿真
Key words:UG;cam mechanism;movement simulation
中图分类号:TP391.7 文献标识码:A 文章编号:1006-4311(2017)09-0143-02
0 引言
UG(Unigraphics NX)是西门子公司的一款三维设计软件,其运动仿真的功能也相当强大,运动仿真模块是UG重要组成部分,它可以直接应用模型的装配文件来建立不同条件下的运动仿真而不会干扰主模型的装配。
凸轮机构由凸轮、从动件和底座组成。其特点是结构简单、工作可靠。传统的凸轮机构的运动分析方法有图解法、解析法,虽然直观但作图复杂,而且建立的数学关系式比较复杂;本文通过UG模块建立凸轮机构的装配模型,对凸轮机构进行运动仿真分析,可以直观的看到凸轮的运动过程,同时从分析的结果中可以看到其机构存在的不足,以便设计人员及时进行改进设计。
1 凸轮轮廓线的绘制
下面以偏心直动尖点的凸轮机构作为例子,分别介绍用作图法、解析法和利用UG软件进行凸轮机构设计和运动仿真分析的方法,先定义凸轮各参数:凸轮基圆半径r0=50mm;偏心距e=10mm;从动件行程s=26mm。
1.1 作图法绘制偏心直动尖点凸轮轮廓线
以O点为圆心,以r0作为半径,作凸轮的基圆,同样以O为圆心,以e为半径,作一个圆,根据位移图分别在基圆上找到点1、2、3、……15,其中1到8为120°,8到9为60°,9到15为90°,分别过这些点作偏距圆的切 线,然后根据位移图,分别找到点1'、2'、3'、……15',用光滑的曲线将这些点连接起来,就形成了凸轮的轮廓曲线,其中1'到8'为推程,8'到9'为远休程,9'到15'为回程,15'到0为近休程。如图1所示。
1.2 解析法设计凸轮轮廓线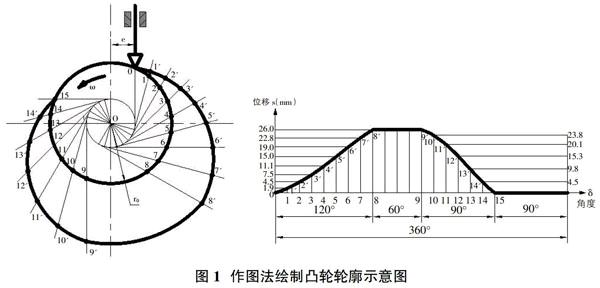
根据工作的需要,选定从动件的运动规律,确定凸轮的基圆半径,偏距,滚子半径等,如图2所示,然后用解析法来设计凸轮轮廓曲线,在进行凸轮轮廓线设计时,求出凸轮轮廓线的方程式:x=f(δ),y=f(δ),δ为凸轮转角,滚子中心在初始位置B处,坐标为:(e,s0)。由图可知:s02=r02-e2则可得s0=(r02-e2)1/2,当滚子中心到达B0点时,凸轮转过δ,推杆产生位移s,理论上轮廓线上B0点的坐标为:X=(s0+s)sinδ+e cosδ;
Y=(s0+s)cosδ-sinδ,此式即为凸轮轮廓线方程,其中s0为从动杆尖点初始位置到凸轮中心O的位移。由图可知:tgθ=-dx/dy=(dx/dδ)/(-dy/dδ)=sinθ/cosθ,经过推导可以得到凸轮轮廓B0`的坐标为:
x`=x±rr cosθ,y`=y±rr sinθ。
2 用UG进行凸轮机构运动仿真和运动分析
2.1 创建连杆及运动副
进入UG建模环境,绘制凸轮轮廓曲线,建立凸轮模型,然后建立从动件和机架模型并且进行装配,进入运动仿真环境,新建一个运动分析方案。在UG运动仿真中,先将凸轮、从动杆及框架定义成为连杆,才能在装配模型中添加运动副。连杆定义完成后,为各个组件定义运动副,连杆和运动副必须是同时存在的,否则无法进行运动仿真。在本凸轮机构运动仿真中,建立三个连杆,分别为L001(机架),L002(顶尖从动杆),L003(凸轮);建立四个运动副,分别为机架固定副(J001),凸轮与机架之间的旋转副(J002),顶尖从动杆与机架之间的滑动副(J003),顶尖在凸轮轮廓线上的点在线上副(J004),如图3所示。
2.2 定义运动驱动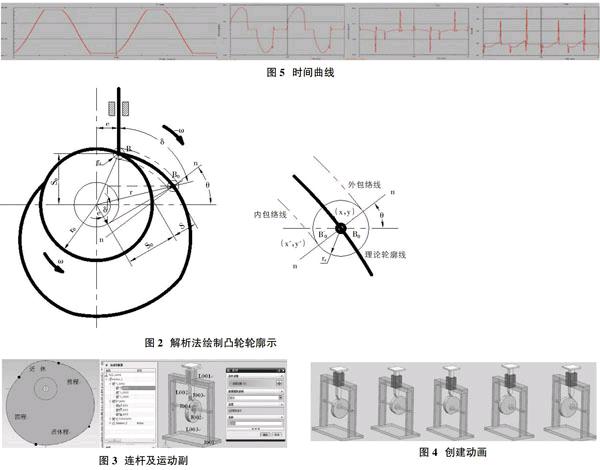
在UG运动仿真中,为了使机构运动起来,除了定义连杆及运动副,需要添加“驱动”来使机构进行运动。驱动通常添加在组件的运动副上,用驱动可以让机构以某种规律进行运转。驱动主要有以下几种类型:①无驱动;②恒定驱动;③简谐运动驱动;④运动函数;⑤关节运动驱动。在此凸轮机构运动中,将旋转副J002设为驱动,驱动形式选择恒定驱动,并设定初速度参数为60,使凸轮以60°/s的速度匀速转动。
2.3 创建解算方案
创建解算方案时就是要定义方案类型、步数、时间等参数。在一个机构中,可以定义多种解算方案,不同的解算方案可以定义不同的分析条件。定义此凸轮机构的解算方案为:常规驱动,分析类型为:运动学/动力学,时间设为18秒,步数为300步,选择“通过按确定进行解算”复选框。确定后启动解算器,进行运动分析,运动分析完成后如果存在冗余的约束,系统会自动弹出对话框进行提示。
2.4 运动仿真
解算方案计算完成后,点击运动分析工具条上的“动画按钮”,当点击播放按钮时,凸轮机构就根据所设定的参数及运动规律进行运动,如图4所示,播放可以是一次播放,循环播放和往返播放三种模式。同时,点击“导出至电影”按钮,则可以将此仿真动画输出为AVI电影格式。除了可以使用“动画”工具输出机构运动视频外,其分析结果还可以图表的方式输出。点击“作图”按钮,在弹出的图表对话框中选择顶尖滑动副J003为图表对象,单击添加按钮将位移曲线加到定义曲线列表中,点击确定按钮,即可输出时间-位移曲线,用同样的方法,可以输出时间-速度曲线、时间-加速度曲线、时间-力曲线,如图5所示。
3 结论
利用 UG 作为三维设计软件,在建模环境中建立凸轮机构的模型,在仿真模块中进行凸轮机构的运动仿真分析,通过模拟凸轮机构实际运动状况及输出的时间-位移曲线、时间-速度曲线、时间-加速度曲线、时间-力曲线等,可以分析出所设计的凸轮机构的干涉情况及是否满足当前工作要求。相比传统的作图法及解析法来设计凸轮机构,使用三维软件进行凸轮机构的设计,不仅可以直观地观察到机构实际的运动状态,还可以通过分析的结果来指导设计人员进行机构的优化设计,同时避免了用传统的方法而进行的大量而又复杂的设计计算,大大减轻了设计人员的工作强度。
参考文献:
[1]宋晓华,方坤礼.基于UG的凸轮机构设计和运动仿真 机械研究与应用,2005(18).
[2]王知行,刘廷荣.机械原理[M].北京:高等教育出版社,2000.
[3]北京兆迪科技有限公司.UG NX 8.5运动分析教程[M].机械工业出版社,2014.
