KR125型机器人在卷烟成品码垛中的适用性改造
2017-04-13刀荣贵车文张繁伟罗兵姜永愿
刀荣贵,车文,张繁伟,罗兵,姜永愿
(红塔烟草(集团)有限责任公司,云南玉溪653100)
KR125型机器人在卷烟成品码垛中的适用性改造
刀荣贵,车文,张繁伟,罗兵,姜永愿
(红塔烟草(集团)有限责任公司,云南玉溪653100)
为解决码垛机器人主轴部件损坏,备件缺失,采购周期长、费用高,没法及时满足卷烟生产所需的问题,利用现有的设备拆机件进行拼装改造。改造思路是以KR125/3型主轴为基础,用KR150L 150/3型腕部轴与之拼装。通过对机器人负载重量、加长臂、额定有效荷载、版本号和配重等关键技术参数适用性分析,按照其拆除、起吊、搬运、装配、调整等既定的标准程序进行改造。应用效果显示,KR125型机器人改造后用于卷烟成品码垛能够正常运行,在保证烟箱合格率的前提下速度可达75%以上、22 h连续工作。利用拆机件进行设备拼装改造,在不投入费用的情况下满足生产所需,节省设备购置和维修费用。
工业机器人;卷烟;适用性
1 问题
红塔集团玉溪卷烟厂用于卷烟成品码垛的15台机器人采用德国KUKA公司的高荷载(High payloads)系列KR150L 150/ 3型,这些机器人于2003年开始使用,至今已经出现轴座开裂、漏油严重、备件停产等问题。当维修需要备件时,通过国内代理商咨询德国KUKA公司,往往不支持更换个别零部件,而是建议更换整机。如果更换整机,进口采购流程周期需要半年以上,因等待时间长,无法及时解决生产所需;另一方面需要耗费巨资采购,据估算,整机采购1台机器人的费用和服务费用达100万元以上。
解决维修备件缺失问题的常用方法是充分利用现有资源进行拼装改造。当前的有利资源是制丝车间用于烟箱拆包的机器人6台,但拆包机器人与码垛机器人的型号不一致,前者的型号是KR125/3,如果将其作为码垛机器人使用,其技术参数不一致,其改造后对于卷烟成品烟箱码垛的适用性需要验证。
2 改造方法
2.1 机器人结构
KUKA机器人的组成部分(图1a)和六轴示意图(图1b)。KUKA机器人可分解为两大部分主轴和腕部轴,其中主轴包含基座、旋转座和连接臂,腕部轴包含手臂、腕部和夹具。
问题是用于卷烟成品码垛的机器人KR150L 150/3型旋转座开裂,欲使用KR125/3型代替之,改造的思路:以KR125/ 3型主轴为基础,用KR150L 150/3型腕部轴与之拼装。二者同属高荷载系列,版本号一致;但二者的负载重量、加长臂、额定有效荷载、版本号和配重等技术参数不一致,需要进行适用性分析。
2.2 适用性分析

图1 机器人结构
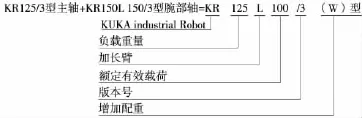
图2 改造后机器人型号
(1)负载重量。厂家按照型号结合加长臂确定。从表1中看出三者负载重量相同,该项改造技术参数可行。
(2)额定有效荷载。改造后KR125L 100/3(W)的额定有效荷载为100 kg,比在用KR150L 150/3的额定有效荷载150 kg还小,但最大烟箱重量(以最重的玉溪硬和谐计算)只有29.8 kg,能够满足要求,该技术参数可行。
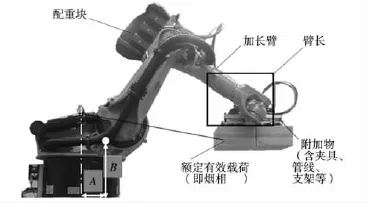
图3 技术参数所涉及的机器人部位
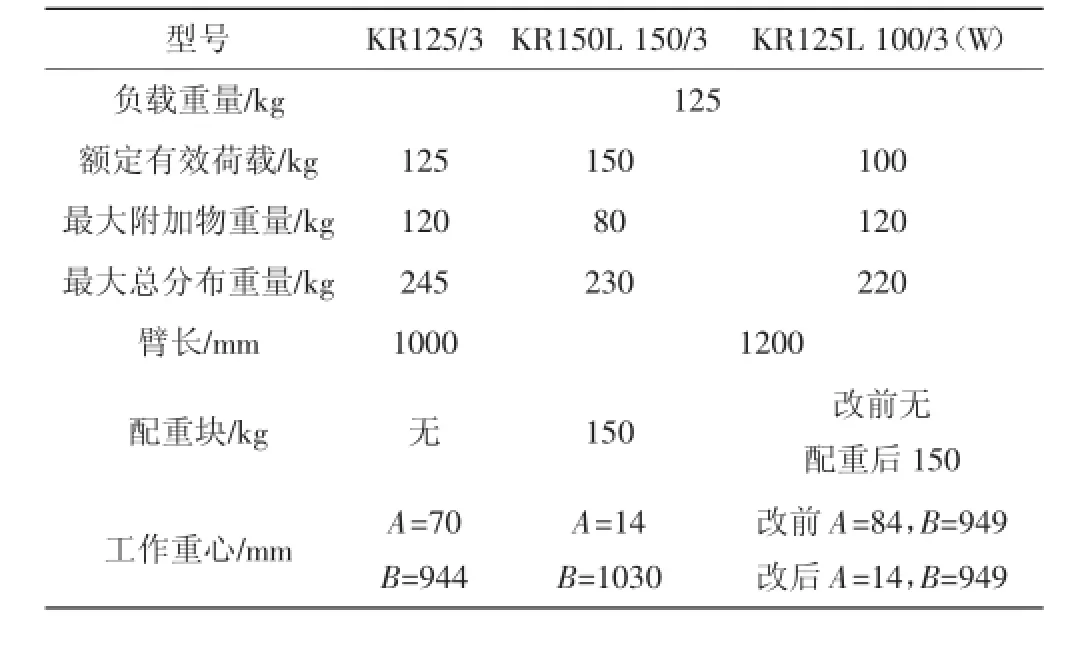
表1 技术参数对比表
(3)最大附加物重量。改造后要求不超过120 kg,实际上附加物(含夹具24 kg,线管支架等6 kg)只有30 kg,符合要求,该技术参数可行。
(4)最大总分布重量。最大总分布重量=额定有效荷载+最大附加物重量。改造后要求不超过220 kg,由于负载重量125 kg的机器人出厂时不设置配重块,因此改造后的实际最大总分布重量(含烟箱29.8 kg、附加物30 kg、配重150 kg)为209.8 kg,符合要求,该技术参数可行。
(5)臂长。在用码垛机器人KR150L 150/3有加长臂,总臂长1.2 m;而改造前的拆包机器人KR125/3没有加长臂,改造时将前者加长臂安装到后者,使臂长增加到1.2 m,长度符合要求。
(6)配重块。在用的码垛机器人KR150L 150/3有加长臂,需要配重块;而KR125/3负载重量125 kg的机器人出厂时不设置配重块,但备有安装位置且尺寸一致,改造时将前者配重块安装到后者,根据(4)的分析,符合要求。
(7)工作重心。增加臂长和配重块改造之后机器人的重心A=14 mm,B=949 mm,与在用的码垛机器人偏度A一致,高度B更小,符合要求。
(8)结论。改造后的KR125L 100/3(W)机器人与在用的码垛机器人荷载系列和版本号一致,关键技术参数符合要求,增加臂长和配重后改造适用性可行。
茶染艺术的染色方法主要分为直接染色法、同浴媒染法和后媒染色法[8]。其中采用直接染色法可染棕色,采用绿矾同浴媒染法可得皂色,分别用绿矾、铁浆后媒染色法可得莲子褐色和砖褐色。虽然茶叶分为了绿、黄、黑、红、青和白六种,但是每一种下又有多样的品种,不同的品种,其茶色都会有微妙的差别。甚至同一品种下,不同的制作工艺都会造成不同的茶色。除此之外,染色的手法、环境、时间、温度均是影响茶染效果的因素。所以,经过茶染出的成品总是带有独一无二的特性。
2.3 改造程序
机器人的拆除、起吊、搬运、装配、调整等操作有特定的要求,需要按照给定的方法和程序进行改造。
(1)拆除机器人夹具(图4a)。手动操作机器人,使腕部竖直,将夹具搁于托盘上,拆除连接螺栓。
(2)起吊机器人(图4b)。机器人有3个吊点位置,调整吊绳位置及长短,使吊点竖直通过机器人重心;同时注意吊绳绑缚方法和防脱落保护方法。
(3)搬运机器人(图4c)。将机器人收缩,重心通过机器人中心,搁于托盘,叉车进入托盘位置后,用绑缚带拴在叉车上防止搬运时倾倒。
(4)使用正确的吊带绑缚方法,拆除机器人腕部(图4d)。
(5)拆下KR150L 150/3腕部上的加长臂,安装在KR125/3腕部上,然后将其安装到KR125/3。

图4 垛机器人改造过程
(6)拆下KR150L 150/3的配重块,安装在KR125/3上,改造成KR125L 100/3(W)。
(7)将KR125L 100/3(W)安装到码垛工位,恢复码垛夹具。
(8)调试运行,由于改造后机器人与在用码垛机器人荷载系列、版本、臂长、配重一致,所以改造后码垛位置正确,仅需在个别位置上使用KCP进行微调。
3 应用效果
KR125型机器人改造后用于卷烟成品烟箱码垛作业,能够按照给定码垛程序正常运行,控制过程、动作范围、码垛精度均正常。在保证烟箱不掉落、保障产品合格率的前提下,速度可达75%以上,能够22 h连续工作,完全能满足卷烟生产成品码垛需求。利用现有设备资源,分析拆机件的适用性,进行拼装改造,可在不投入购置设备费用的情况下满足生产所需,极大地节省费用。
〔编辑 利文〕
TH17
B
10.16621/j.cnki.issn.1001-0599.2017.02.28
