基于立方体STEWART的微振动主动控制分析与实验
2017-04-10王超新刘兴天张志谊
王超新,刘兴天,张志谊
(1.上海交通大学 振动、冲击、噪声研究所,上海 200240; 2.上海交通大学 机械系统与振动国家重点实验室,上海 200240;3.上海卫星工程研究所,上海 200240)
基于立方体STEWART的微振动主动控制分析与实验
王超新1,2,刘兴天3,张志谊1,2
(1.上海交通大学 振动、冲击、噪声研究所,上海 200240; 2.上海交通大学 机械系统与振动国家重点实验室,上海 200240;3.上海卫星工程研究所,上海 200240)
采用立方体结构隔振平台,它具有各向同性以及轴向运动解耦等特点。对立方体Stewart平台分别进行运动学和动力学分析,获得杆长与平台姿态的雅克比矩阵,揭示平台振动传递特性。采用压电叠堆为主动控制单元,设计立方体Stewart主动隔振平台,并通过实验测定平台主动杆在5~120 Hz频带内的输出特性,通过实测数据修正理论分析得到的雅克比矩阵。结合Fx-LMS主动控制算法,对基础干扰进行主动抑制,实验结果表明,在5~120 Hz范围内,对于单频干扰,平台可实现30 dB抑制效果。
微振动;立方体Stewart平台;主动隔振;雅克比矩阵;Fx-LMS
航天器上的微振动对太空对地观测、激光通信有着重要的影响[1]。六自由度Stewart平台广泛应用于精密系统的振动隔离,但是平台的六杆运动是耦合的,使Stewart平台的运动学和动力学变得比较复杂。立方体结构的Stewart平台不仅可简化控制算法、实现控制器的解耦和载荷平台的精确定位,也可简化运动学和动力学的计算以及机械结构设计[2]。Stewart平台根据支腿刚度主要分为两大类,即刚性与柔性。典型的刚性设计通常使用压电陶瓷材料作为作动器,而柔性设计中,则通常使用音圈线圈并联弹簧的设计[3]。
GENG[4]提出了一种基于Stewart平台的主动隔振方案,采用鲁棒自适应滤波算法对单频振动进行抑制。RAHMAN[5]提出一种正交六杆结构,采用主动控制来抑制空间观测系统的振动,并对其姿态进行调整。实验结果表明,相对于被动方案,主动控制在10~100 Hz可实现额外的振动衰减。COBB等[6]发明了一种基于混合隔振机构的六杆平台来隔离和抑制振动。这套方案主要提高被动隔振在低频段的性能并且使载荷平台具备调姿功能。HANIEH等[7]设计了一种带阻尼柔性结构的六自由度Stewart平台,实现隔振和调姿功能。LI等[8]基于Stewart平台提出了一种非线性模型的SHARF算法,并对部分单频干扰获得了30 dB的衰减。MCINROY等[9]提出了一种新的分析算法来计算正交Gough-Stewart 平台(OGSPs),这种新的算法简化了单点OGSP公式对于平台运动学的研究有很大帮助。HAN等[10]利用Newton-Euler公式对立方体结构的六自由度平台进行了动力学建模,并给出六自由度混合隔振平台的频域特性。在以上文献中,运动学和动力学建模并不详细,而且实验主要集中在单频单向振动的衰减。在实验模型中,Stewart平台作动器的输出一致性未得到验证,并且计算雅克比矩阵也未被校正。
本文结构如下:第一节主要推导立方体Stewart平台的运动学并给出雅克比矩阵;第二节描述了立方体Stewart平台的动力学模型;第三节利用建立的动力学模型对Stewart平台进行主动隔振仿真;第四节详细描述Stewart平台的主动控制实验;第五节是立方体Stewart平台主动隔振方案总结。
1 立方体Stewart平台运动学分析
Stewart平台运动学有两个出发点:正解和反解。运动学反解是已知负载平台位姿即位置参量(x,y,z) 和旋转参量(α,β,γ),求解平台六个支腿的长度,也是本文的出发点。正解问题是已知六个腿长求解负载平台位姿。
Stewart平台姿态描述普遍采用欧拉角,建立在笛卡尔坐标系基础上,按一定顺序选取三个坐标轴连续做三次旋转。欧拉角坐标如图1所示,坐标系o-xyz依次逆时针绕x轴、y′轴和z轴旋转角度α,β和γ,途经坐标系o-xy′z′和o-x′y′Z,最终到坐标系o-XYZ。每一次旋转都可通过二维余弦矩阵计算坐标变换关系。因此,坐标系o-XYZ和o-xyz中的矢量可以通过方向余弦矩阵R计算。旋转矩阵R为

(1)
由于平台转角很小,近似将欧拉角看成是绕x,y和z轴的旋转角度。
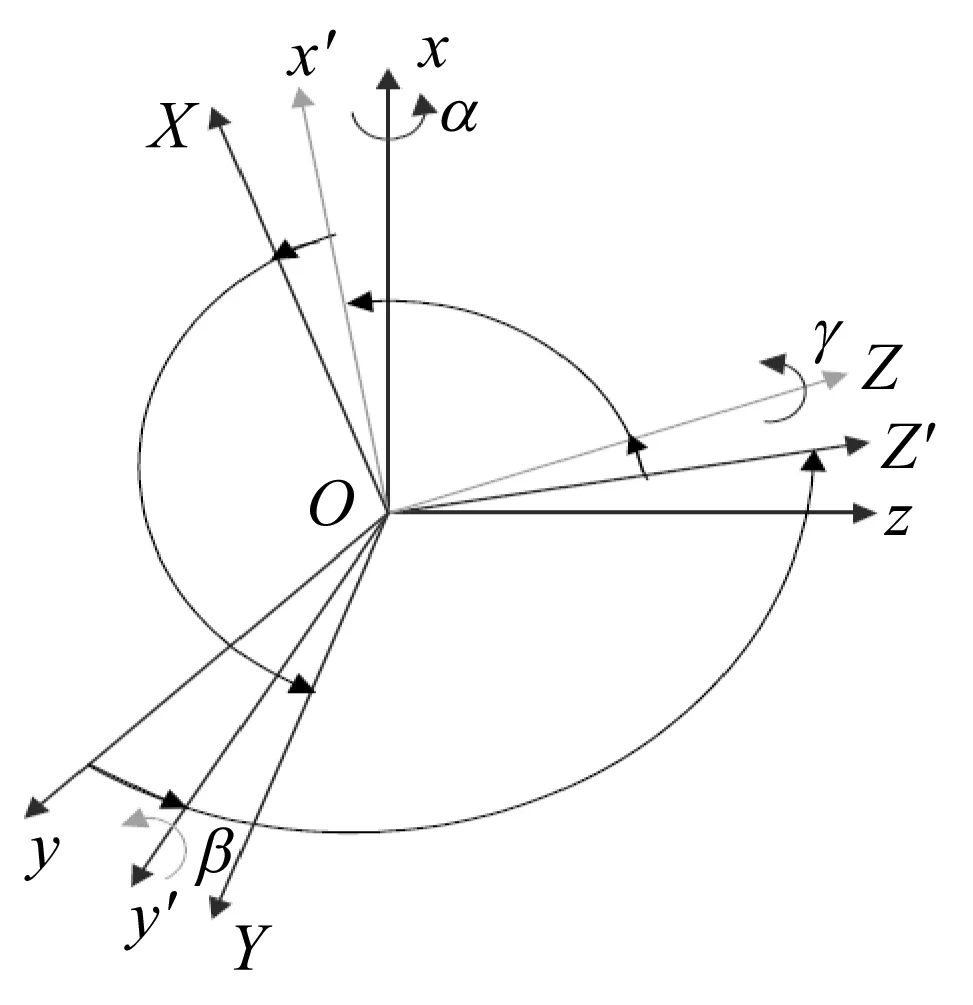
图1 欧拉角坐标Fig.1 The Euler angles
如图2所示,在负载平台和基础选择Op和Ob作为参考点,并以其分别建立笛卡尔坐标系P和B。B是固定坐标系,其它坐标都可表示在B下的矢量。t表示从B原点Ob到P原点Op的矢量,t=(x,y,z),P相对B的欧拉角θ=(α,β,γ)。设从Op到负载平台各支腿的连接点矢量为pi,从Ob到基础各支腿的连接点矢量为bi,Stewart平台的六个支腿轴线方向矢量为Si(i=1,2,3,4,5,6),可由下式表示
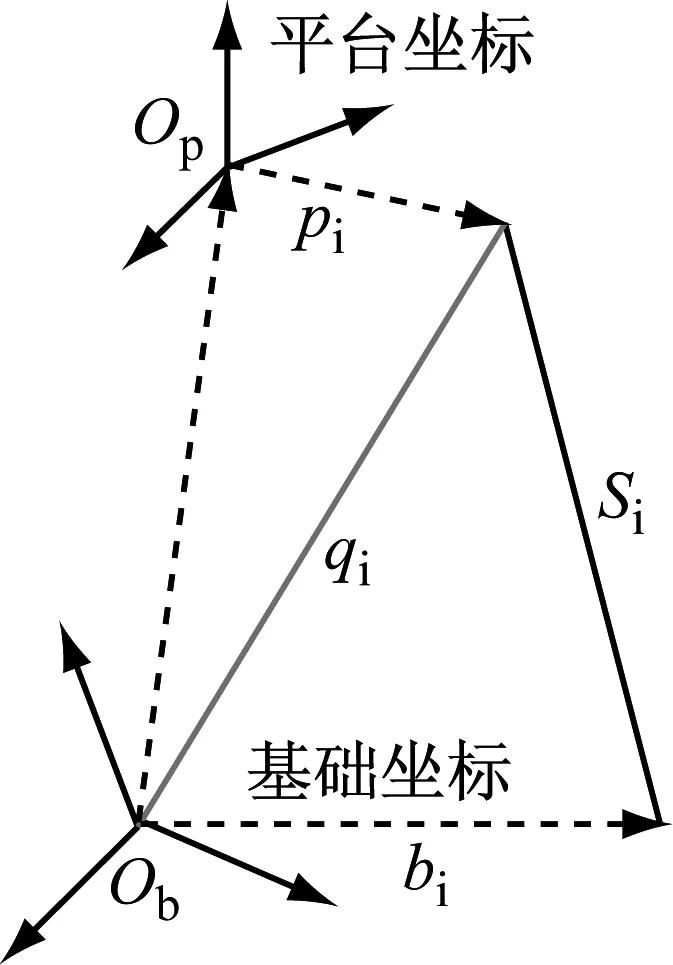
图2 负载平台和基础坐标建立Fig.2 The coordinate systems of the base and payload
Si=Rpi+t-bi
(2)
式中支腿长度
(3)
各支腿的单位矢量可写成
(4)
(5)
各支腿滑动速度[11]为
(6)
雅克比矩阵可写为
(7)
立方体平台俯视图如图3所示,图中建立和实验相同的坐标系,垂直于纸面方向为z轴,x和y轴在图中标出,同时标出6个杆的位置和标号。
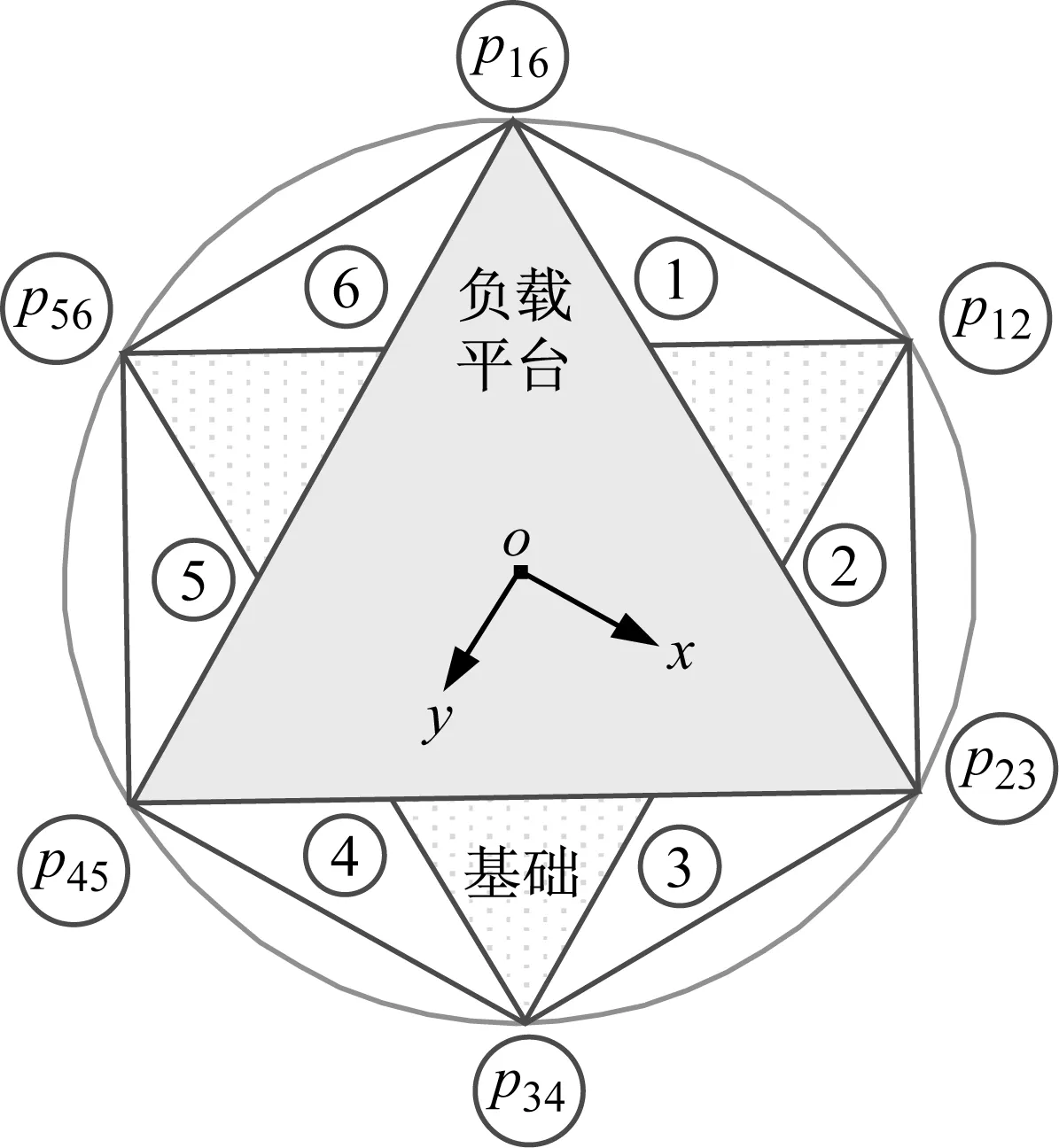
图3 立方体平台结构俯视图Fig.3 Top view of Stewart
分别以基础和负载平台的几何中心为原点,建立静坐标系Ob-xyz和动坐标系Op-xyz,其中Ob-xyz的x和y轴方向与Op-xyz一致。这样,旋转矩阵R为单位矩阵,t=(0,0,Zr)。Zr为上下平台在z轴上的距离。b12,b34,b56为支腿下端在Ob-xyz的坐标,p16,p23,p45为支腿上端在Op-xyz的坐标。根据式(7)可得立方体Stewart的雅克比矩阵

图4 结构实物图Fig.4 The experimenatal model of Stewart
(8)
2 立方体Stewart平台动力学分析
Stewart平台隔振中各杆位移微小,动力学建模时可假设雅克比矩阵J不变。主动杆与负载平台、基础的力主要集中在杆的轴线方向,可不考虑垂直于杆的力。
假设负载平台和基础为刚体,根据虚功原理,主动杆虚功为
W=fTδq=fTJδχ
(9)
式中:f表示负载平台对主动杆的力;δq为主动杆虚位移;W表示虚功。载荷虚功为
(10)
式中:F为负载平台所受力;T为负载平台所受扭矩;δχ为负载平台广义虚位移。进一步可得负载平台所受广义力和主动杆对负载平台作用力的关系:
(11)
根据Newton-Euler公式可得:
(12)
式(12)揭示6杆主动控制力和负载平台姿态的关系。其中,Mp为质量矩阵,Ip为转动方向的转动惯量,w×IPw很小,可忽略不计。式(12)可以写为
(13)

u=Jχ
(14)
式中:u是基础固定,负载平台自由时,主动杆长度变化六维向量。χ是负载平台的姿态描述向量,J是负载平台的雅克比矩阵。同理可写出六杆和基础的运动学关系,即
d=J′χ′
(15)
式中:d是负载平台固定,基础自由时,主动杆长度的变化向量,χ′是基础的姿态描述向量,J′是基础的雅克比矩阵。
考虑到系统的刚度和阻尼,可得:
(16)
式中:f是控制力,k为单根杆轴线方向的刚度,c为单根杆轴线方向的阻尼,由于采用立方体结构,每个杆布置是一致的,所以每根杆的刚度和阻尼是一样。
综合前式可得:
(17)
3 立方体Stewart平台控制仿真
(18)


图5 周期干扰的自适应控制原理图Fig.5 The adaptive control diagram
仿真Stewart平台对单频激励的隔振性能。Stewart结构和仿真参数如下,负载平台质量m是3.5 kg,转动惯量Ix,Iy和Iz分别为0.89 kg·m2,0.89 kg·m2和0.27 kg·m2, 每个压电棒的刚度为1×107N/m,阻尼比为0.008。根据动力学式可知,压电棒到负载平台力和速度的频响函数,基础到负载平台速度和速度的频响函数。单频干扰频率为50 Hz,激励速度幅值为2 mm/s,自适应权值数4个,无控制时负载平台响应1.3 mm/s, 有控制为3.35×10-2mm/s,有无控制结果,如图6所示。
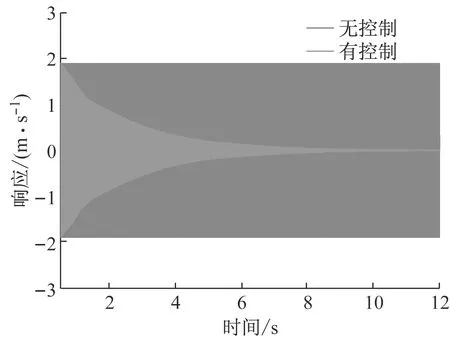
图6 单频干扰有无控制对比Fig.6 Responses of Stewart under tonal disturbances
扫频激励干扰频率范围为25~30 Hz,幅值为1 mm/s,有200个权值,控制系统的采样频率为400 Hz。无控制时负载平台响应为0.675 mm/s,有控制时为0.116 mm/s,有无控制结果如图7所示[14]。
4 立方体Stewart平台实验
测试立方体Stewart平台对微振动的主动隔振性能,首先进行背景振动测试,确实其是否适合进行微振动实验,然后测试隔振平台6个压电棒的增益,接着通过压电棒控制输入来校正压电棒与隔振平台雅克比矩阵,最后测试隔振平台在单频激励干扰下主动控制性能。

图7 扫频干扰有无控制对比Fig.7 Responses of Stewart under random disturbances
4.1 实验原理与背景振动
实验原理如图8所示,数据采集仪器(LMS)主要用于采集平台各方向的振动信号,同时也用于微振动干扰源的信号频率和幅值的控制。加速度计信号先通过电荷放大器调理,然后分别由数据采集仪器和上位机接受,上位机对控制目标信号进行处理,并通过NI控制板卡发出控制信号,经过滤波器和功率放大器,控制隔振平台6个压电棒产生动作。为了更好地隔离来自地面的振动,整个实验平台放到一个装满细沙的长方体玻璃容器中,同时在容器下端放置了橡胶减震器。


图8 Stewart平台实验原理图与实验图Fig.8 The experimental platform
平台上的背景振动小于10 ug,如图9所示,振动加速度RMS最大值为4.11 ug。PSD最大值出现在12 Hz,为57.3 ug2/Hz。实验中的振动量级为mg,微振动实验有足够的信噪比。


图9 背景振动时域与PSD测试结果Fig.9 The test results of background vibration
4.2 隔振平台6个压电棒的增益与雅克比矩阵修正
主动控制需要测试每个压电棒到负载平台的频响函数。由于采用立方体Stewart平台,每个主动杆杆长相同,到负载平台中心距离相同,因此,在负载平台中心处放置一个加速度传感器,测试每个杆到此加速度传感器的各向特性,以此来获得各主动杆和其输入电压的对应关系。
对6个压电棒进行频响函数测试,以有效值为0.3 V、频带为1~128 Hz的电压信号作为控制输入和参考。如图10所示,图中6条频响函数曲线从20~120 Hz范围内具有良好的相似性,唯一的差别是增益,但是从120 Hz开始,频响函数的一致性较差,主要原因是压电棒联接或者平台空间结构非严格对称导致6个压电棒的作用力并不完全一致,高频特性尤其如此。

图10 6个压电棒到上平台中心处的频响函数Fig.10 The FRF of each strut
杆的伸长量和上平台6个方向的运动关系的如式7所示,但是此式为理论计算,由于实际系统参数和结构不严格一致或对称,理论上的单一方向运动参数需要修正。这里单一方向运动定义为主方向振动远高于其它方向振动,有15 dB以上的差别。以有效值为0.1 V的电压信号作为输入和参考,偏置电压取8 V。由图11可见,在20~120 Hz范围内,z方向的运动比较显著,但系统在66 Hz处有个小模态,导致各个方向运动的区分度降低。参考值为1 m/s-2/V,表1给出了三个平动和一个转动方向的Jacobi矩阵的修正。

图11 z方向的纯运动Fig.11 Pure vibration in the z directions

表1 修正的Jacobi矩阵Tab.1 Refined Jacobi matrix
4.3 隔振平台对z方向振动控制实验
对于立方体Stewart隔振平台的主动控制实验,本文着重描述对于z方向在单频干扰下的控制效果。选取代表性的单频激励下控制端有无控制对比结果说明主动控制的有效性。如图12所示:20 Hz对应的有无控制对比图,从图上可明显看出对于单一频率主峰,有很好的抑制效果,同时在全频带范围内对于其他峰值并无明显放大,具体数值如表2所示。从表中可以看到,对于低频5 Hz处,该平台也有一定的控制效果,但是由于6个杆在低频输出一致性的差别,导致控制性能下降。

图12 20 Hz激励下控制端有无控制振动
Fig.12 Comparison of velocity response under 20 Hz with and w/o control
表2 不同频率激励下基础和控制端振动衰减
Tab.2 Comparison of velocity response under tonal disturbances with and w/o control

频率/Hz57206090无控制-97.19-90.95-78.69-77.55-78.38有控制-110.03-105.93-109.22-109.481-109.15衰减/dB12.8414.9830.5331.9330.77
4.4 隔振平台对转角方向振动控制实验
对于转角方向振动测试,主要是通过图8中4号加速度传感器。扫频设置采样频带为0~128 Hz,频带线谱数量4 096根,总扫频时间32 s。第一组扫频激励的频率为25~30 Hz,每一个整数频率点的停留时间大约为6.4 s,整个时间弦轴上控制效果RMS值衰减为7.5 dB的衰减,实验结果如图13(a)所示;第二组扫频激励频率60~65 Hz,实验结果如图13(b)所示,控制后时域RMS值衰减10.43 dB。

(a)
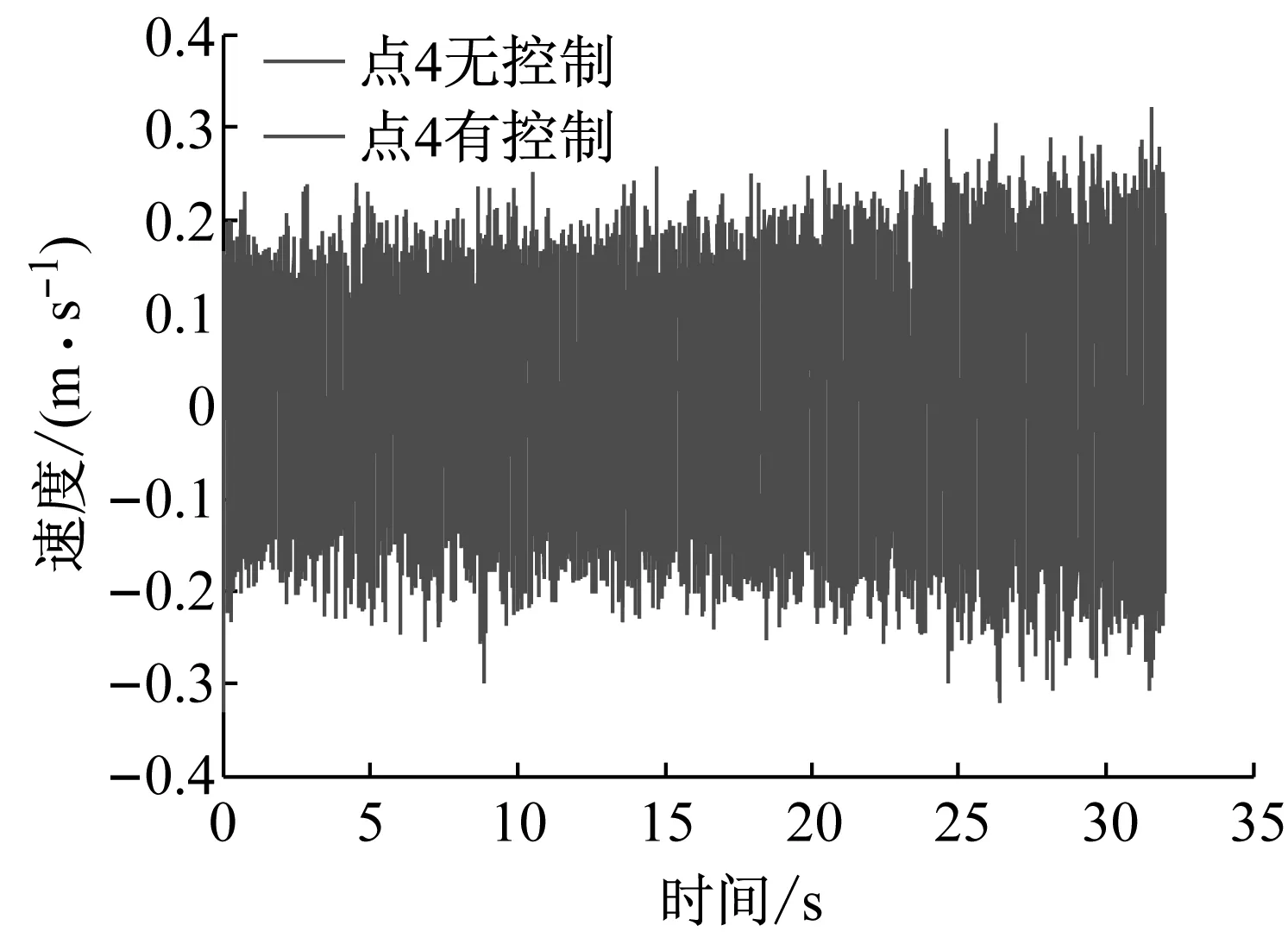
(b)
5 总 结
本文对立方体Stewart平台运动学和动力学进行了建模和分析,并采用基于自适应主动控制算法对隔振平台进行仿真。通过立方体Stewart平台实验,获得了6个压电棒输出特性并对理论雅可比矩阵进行修正,在此基础上,对平台主振方向的单频和扫频干扰施加主动控制,取得了良好的控制效果,与控制仿真结果一致。
[1] LIU C, JING X, DALEY S, et al.Recent advances in micro-vibration isolation[J].Mechanical Systems and Signal Processing, 2015, 56: 55-80.
[2] PU H, LUO X, JIANG W, et al.Modelling and control of hybrid vibration isolation system for high-precision equipment[C]//Control and Automation (ICCA), 2010 8th IEEE International Conference on.IEEE, 2010: 2152-2157.
[3] THAYER D, CAMPBELL M, VAGNERS J, et al.Six-axis vibration isolation system using soft actuators and multiple sensors[J].Journal of Spacecraft and Rockets, 2002, 39(2): 206-212.
[4] GENG Z J, HAYNES L S.Six degree-of-freedom active vibration control using the Stewart platforms[J].Control Systems Technology, IEEE Transactions on, 1994, 2(1): 45-53.
[5] RAHMAN Z H, SPANOS J T, LASKIN R A.Multiaxis vibration isolation, suppression, and steering system for space observational application[C]//Astronomical Telescopes & Instrumentation.International Society for Optics and Photonics, 1998: 73-81.
[6] COBB R G, SULLIVAN J M, DAS A, et al.Vibration isolation and suppression system for precision payloads in space[J].Smart Materials and Structures, 1999, 8(6): 798.
[7] HANIEH A A, PREUMONT A, LOIX N.Piezoelectric Stewart platform for general purpose active damping interface and precision control[J].European Space Agency-Publications-Esa sp, 2001, 480: 331-334.
[8] LI C, MAO J.Active vibration control under the actuator with magnetic hysteresis loop[C]//Control and Automation, 2005.ICCA’05.International Conference on.IEEE, 2005, 2: 914-918.
[9] MCINROY J E, JAFARI F.Finding symmetric orthogonal Gough-Stewart platforms[J].Robotics, IEEE Transactions on, 2006, 22(5): 880-889.
[10] HAN P, Wang T, WANG D H.Modeling and control of a Stewart platform based six-axis hybrid vibration isolation system[C]//Intelligent Control and Automation, 2008.WCICA 2008.7th World Congress on.IEEE, 2008: 1613-1618.
[11] 徐鹏.六自由度并联机构 Stewart 平台的动力学建模与仿真[D].重庆: 重庆大学, 2005.
[12] ZHANG Z, HU F, WANG J.On saturation suppression in adaptive vibration control[J].Journal of Sound and Vibration, 2010, 329(9): 1209-1214.
[13] HU F, CHEN Y, ZHANG Z, et al.Tonal vibration suppression with a model-free control method[J].Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2012, 226(4): 360-370.
[14] ZHANG Z Y, HU F, HUA H X.Simulation and experiment on active vibration isolation with an adaptive method[J].Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2010, 224(3): 225-238.
Micro-vibration active control for a Stewart platform with a cubic configuration
WANG Chaoxin1,2, LIU Xingtian3, ZHANG Zhiyi1,2
(1.Institute of Vibration, Shock and Noise, Shanghai Jiao Tong University, Shanghai 200240, China;2.State Key Laboratory of Mechanical Systems and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China; 3.Institute of Satellite Engineering in Shanghai, Shanghai, 200240, China)
A Stewart platform with a cubic configuration was developed having uniformity of stiffness and a control capability in all directions, and a simplified mechanical design.Its kinematic and dynamic analyses were conducted to obtain Jacobian matrix relating the extension of the piezo actuator to 6-DOF of the top plate and to reveal its characteristics of vibration transmissibility.Taking a piezoelectric stack as an active control element, the platform was designed.Tests were performed to measure the output characteristics of the active bar of the platform within the frequency band of 5 Hz to 120 Hz and Jacobian matrix obtained with theoretical analysis was modified with test data.Fx-LMS algorithm was adopted to actively suppress the foundation disturbances.The results showed that within the range of 5 Hz to 120 Hz, the platform is able to achieve 30 dB attenuation effect under a single frequency disturbance.
micro-vibration; Stewart platform with a cubic configuration; active isolation; Jacobian matrix; Fx-LMS
2015-07-23 修改稿收到日期:2016-02-19
王新超 男,博士生,1989年8月生
张志谊 男,博士,教授,1970年11月生
TH535.1
A
10.13465/j.cnki.jvs.2017.05.033