妇科达芬奇机器人手术腹壁定位标尺基于CATIA建模设计与应用
2017-04-07刘彦江安冉冉李冬青常颖
刘彦江++安冉冉++李冬青++常颖


[摘要]目的 基于計算机图形辅助三维交互式作用(CATIA)三维设计软件设计妇科达芬奇机器人手术腹壁定位标尺,并在临床手术配合使用中进行效果评价。方法 选择2015年1月~2016年1月在吉林省肿瘤医院进行妇科机器人手术的患者60例,根据入院顺序分为对照组和试验组,每组30例,首先通过CATIA三维软件模拟建模设计,然后根据妇科机器人手术需要模拟建腹壁定位标尺,在使用过程中适当进行调整,对照组依照妇科医生经验使用常规置入机器人手术鞘卡方法,试验组使用妇科机器人腹壁定位标尺进行定位植入鞘卡方法,比较两组患者的腹壁穿刺鞘卡时间、床旁器械臂系统器械臂发生碰撞次数、床旁器械臂系统器械臂术中角度不当次数、术中鞘卡移位次数及医护人员对两组手术定位方法的满意度。结果 试验组腹壁穿刺鞘卡时间明显短于对照组,床旁器械臂系统器械臂发生碰撞次数、床旁器械臂系统器械臂术中角度不当次数、术中鞘卡移位次数方面明显少于对照组,差异均有统计学意义(t=29.46,P=0.000;t=15.66,P=0.000;t=9.23,P=0.000;t=7.38,P=0.000);医生对试验组定位方法的满意度明显高于对照组方法,差异有统计学意义(t=5.364,P=0.000),护士满意度差异无统计学意义(t=1.756,P=0.086)。结论 手术腹壁定位标尺应用于妇科达芬奇机器人手术,可缩短医生腹壁穿刺鞘卡时间,减少机器人器械臂碰撞与鞘卡腹壁脱落次数,提高满意度,临床应用效果明显。
[关键词]妇科达芬奇机器人手术;腹壁定位标尺;计算机图形辅助三维交互式作用
[中图分类号] R197.39 [文献标识码] A [文章编号] 1674-4721(2017)02(c)-0149-04
Design and application of an abdominal wall positioning scale based on CATIA modeling for gynecological surgeries assisted with Da Vinci robot
LIU Yan-jiang1 AN Ran-ran2 LI Dong-qing1 CHANG Ying1▲
1.Department of Surgical Room,Jilin Cancer Hospital in Jilin Province,Changchun 130012,China;2.Department of Surgical Room,Binzhou Medical University Hospital in Shandong Province,Binzhou 256603,China
[Abstract]Objective To design an abdominal wall positioning scale based on CATIA 3D design software for gynecological surgeries assisted with Da Vinci robot and to evaluate its effect in clinical surgeries.Methods 60 cases of gynecological surgeries assisted with Da Vinci robot in Jilin Cancer Hospital from January 2015 to January 2016 were selected and divided into two groups (control group and experiment group) according to the hospital admission sequence,with 30 cases in each group.Firstly,CATIA 3D software was used to simulate the modeling,then the abdominal wall positioning scale was constructed and simulated according to the need of gynecologic robotic surgery and appropriate adjustments were made during the process of use.The conventional robotic surgical sheath card implantation method was taken in control group according to the experience of gynecologists;while,the gynecological abdominal wall robot positioning scale was used to position and implant the sheath card in experiment group.The time of abdominal puncture sheath card,the times of collision frequency of instrument arms for the bedside instrument arm system and improper surgical instrument angle,shift times of intraoperative sheath card and the satisfaction of gynecologists and nurses on surgical positioning were compared between the two groups.Results The time of abdominal puncture sheath card in experiment group was shorter than that in control group,the times of collision frequency of instrument arms for the bedside instrument arm system and improper surgical instrument angle and the shift times of intraoperative sheath card in experiment group were less than those in control group,and the difference were statistically significant (t=29.46,P=0.000;t=15.66,P=0.000;t=9.23,P=0.000;t=7.38,P=0.000);the satisfaction of gynecologists on surgical positioning method in experiment group was higher than that in control group,and the the difference was statistically significant (t=5.364,P=0.00);but there was no significant difference between the satisfaction of nurses on the two methods (t=1.756,P=0.086).Conclusion The application of abdominal wall positioning scale for gynecological surgeries assisted with Da Vinci robot reduces the time used by doctors on abdominal puncture sheath,the collision frequency of instrument arms for the bedside instrument arm system and the exfoliation times of the sheath card from the abdominal wall,which improves satisfaction and achieves obvious clinical effect.
[Key words]Gynecological surgeries assisted with Da Vinci robot;Abdominal wall positioning scale;CATIA達芬奇机器人手术系统在外科手术中已开始应用,其系统是微创外科发展的时代产物[1],机器人技术[2]是在腔镜手术的基础上延伸了外科医生的手眼功能,能更微观和精准地进行手术操作,被广泛应用于心胸外科[3-4]、普通外科、泌尿外科和妇产科[5-6]等多个专科领域,该技术的应用不但可以改变手术治疗模式;也给手术室护理工作带来新视野、新角度、新技术、新突破,与此同时也给手术配合提出了更高的要求。我院运用“达芬奇”共完成妇科手术197例,腹壁定位器在手术中起到了至关重要的作用。本研究基于CATIA建模设计腹壁定位标尺,并应用于妇科达芬奇机器人手术临床应用效果明显,现报道如下。
1资料与方法
1.1一般资料
选择2015年1月~2016年1月于我院进行的妇科机器人手术的患者60例。其中根据入院顺序分为对照组与试验组,每组30例,其中试验组宫肌瘤核除术6例,卵巢瘤核除术7例,全宫切除术6例,宫颈癌根治术5例,子宫内膜癌6例。对照组宫肌瘤核除术7例,卵巢瘤核除术6例,全宫切除术6例,宫颈癌根治术5例,子宫内膜癌6例。两组患者一般资料及手术方式比较,差异无统计意义(P>0.05),具有可比性。本研究经我院医学伦理文员会批准实施,所有患者均知情同意。
1.2方法
对照组使用常规置入机器人手术鞘卡方法,试验组使用妇科机器人腹壁定位标尺进行定位植入鞘卡方法。
1.2.1常规置入机器人手术鞘卡方法
常规置入鞘卡切口位置:①镜头孔:患者脐部向左、向上分别1 cm处。②左侧机器人器械孔:镜头孔水平向下15°8~10 cm。③右侧机器人器械孔:镜头孔水平向下15°10~12cm。④辅助孔:两臂外下方距离两臂孔5~8 cm或镜头孔与两臂器械孔之间5 cm以上。根据所选鞘卡,切开相应大小切口,置入相应鞘卡。
1.2.2妇科达芬奇机器人手术腹壁定位标尺的设计
1.2.2.1等腰三角形腹壁定位标尺设计 等腰三角形两腰长10 cm,两底角为15°,钝角为150°。分别在三角形的3个顶点、两等腰8 cm处设5个旋转切口标尺(图1)。
1.2.2.2正三角形腹壁定位标尺设计 正三角形边长为8 cm,分别在三角形的3个顶点处设3个旋转切口标尺(图2)。
1.2.2.3旋转切口标尺设计 旋转切口标尺为两种腹壁定位标尺上的配件,圆形,直径2 cm,圆形正中心有一矩形凹槽,长1.5 cm,宽0.2 cm,矩形凹槽内设有0.5、0.8、1.0、1.2 cm 4档卡锁,选定其中一档卡锁位置,使用23号刀片垂直在凹槽内切开皮肤,即为相应鞘卡的皮肤切开宽度。并且凹槽可以360°旋转,可以旋转任意开口方向(图3)。
1.2.3材料选择
腹壁定位标尺采用耐腐ABS材料,其特点是可以耐化学试剂腐蚀而且易制作成型、制作成本低。
1.2.4临床使用方法
首先将等腰三角形腹壁定位标尺的钝角顶点置于平脐向左平移1.0 cm处,底边与身体纵轴垂直放置,可以根据实际情况选定10.0、8.0 cm处的旋转切口标尺(腹壁宽度>25 cm,选用腰长10 cm处的旋转切口标尺;腹壁宽度<25 cm,选用腰长8 cm处的旋转切口标尺),钝角顶点的旋转切口标尺选定1.2 cm切口为机器人镜头鞘卡切口,腰两侧8 cm或10 cm的旋转切口标尺选定0.8 cm切口为器械臂鞘卡切口。通过旋转切口标尺切口用23号刀片切开皮肤,分别置入1.2 cm与两个0.8 cm鞘卡。然后选用正三角形腹壁定位标尺,顶点置左侧或右侧的0.8 cm的切口处,同样底边与患者身体纵轴垂直,选定远离身体中线的底角为鞘卡切口(若此处切口用机器人器械臂,则选用0.8 cm旋转切口标尺;若此处切口使用腔镜器械辅助,则选用0.5 cm或1.0 cm旋转切口标尺),23号刀片通过旋转切口标尺切开皮肤,置入相应的鞘卡。
1.3效果评价
①患者腹壁穿刺鞘卡时间,指医生在腹壁切口定位开始到所有鞘卡置入的时间,时间精确到秒;②床旁器械臂系统器械臂发生碰撞次数,指器械臂在手术过程中相互发生碰撞的次数或是腹腔内机器人器械由于角度问题发生碰撞的次数;③床旁器械臂系统器械臂术中角度不当次数,指在手术过程器械臂不能满足手术需要的角度或是角度不当致使器械不能达到手术区域的次数;④术中鞘卡移位次数,指置入鞘卡的切口过大加之外力因素鞘卡发生移位影响手术进度的次数;⑤医护人员对手术定位的满意度,设计医护人员对手术定位过程的满意度调查表,对参与手术的医护人员进行满意度问卷调查。该量表共有5个维度,20个条目,每个条目5分。主要包括精准度、简易度、保护度、效率度、节约度等。满分100分,采用里克特赋分法,分为特别满意、满意、一般、不满意、非常不满意,分别赋予5、4、3、2、1分,分数越高,满意度越高。
1.4质量控制
实施妇科机器人手术的医生均为同一组医生,以减少个人手法对评价指标的影响。
1.5统计学方法
采用SPSS 16.0统计学软件进行数据分析,计量资料数据用均数±标准差(x±s)表示,两组间比较采用t检验,以P<0.05为差异有统计学意义。
2结果
2.1两组手术定位方法临床效果的比较
试验组医生腹壁穿刺鞘卡时间明显短于对照组,床旁器械臂系统器械臂发生碰撞次数、床旁器械臂系统器械臂术中角度不当次数、术中鞘卡移位次数均明显少于对照组,差异均有统计学意义(t=29.46,P=0.000;t=15.66,P=0.000;t=9.23,P=0.000;t=7.38,P=0.000)(表1)。
2.2医护人员对两组手术定位方法满意度的比较
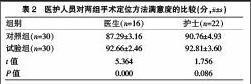
医护人员对试验组定位方法的满意度均高于对照组,医生对两种方法的满意度比较,差异有统计学意义(t=5.364,P=0.000),护士满意度比较,差异无统计学意义(t=1.756,P=0.086)(表2)。
3讨论
机器人技术是计算机技术、数字图像处理技术、微电机系统、传感器技术、生物制造与临床技术相结合的新兴多学科交叉技术[5-7]。CATIA是法国达索公司的产品开发旗舰解决方案。作为PLM协同解决方案的一个重要组成部分,它可以帮助制造厂商设计他们未来的产品,并支持从项目前阶段、具体的设计、分析、模拟、组装到维护在内的全部工业设计流程的软件[8]。常规机器人手术采用人体定位点估算的方式置入鞘卡,无精准的刻度与角度,常常发生器械臂碰撞、所需角度不够等情况[10-11]。而且鞘卡切口大小不一会导致置入鞘卡费力或鞘卡移位、脱落,为此,笔者从手术实际需要出发,使用CATIA软件建模设计出妇科达芬奇机器人腹壁定位标尺,使腹壁定位标尺的设计理论更为充足,精准化腹壁切口的位置、对应角度及大小,加强对机器人器械及器械臂的保护,使腹壁定位标尺更具有实用性。
3.1精准鞘卡切口位置
妇科达芬奇机器人手术的鞘卡切口位置直接影响到器械臂对接后的位置关系,器械臂位置关系不当直接影响整体手术进程与手术效果[12],所以鞘卡切口位置在手术过程中起着决定性作用,妇科达芬奇机器人腹壁定位标尺能够快速准确地对鞘卡切口位置进行定位,减少腹壁穿刺鞘卡时间,明显节约时间成本,提高手术效率,减轻患者的损伤及经济负担[13]。
3.2保护机器人用物
机器人器械及镜头比较昂贵,减少腹腔内机器人器械由于角度问题发生碰撞的次数、保护器械是手术配合的重要内容,本研究显示使用妇科达芬奇机器人腹壁定位标尺,能够减少角度不当导致的床旁器械臂系统器械臂发生碰撞的次数,增加其安全性,延长使用寿命,节约成本。
3.3提高手术安全性
床旁器械臂系统器械臂术中角度不当、术中鞘卡移位都会加大手术的不稳定性,延长手术时间,且医生对于妇科达芬奇机器人手术腹壁定位标尺工具的应用满意度较高。肖荣贤[14]采用腹壁标尺定位做腹壁小切口输尿管取石术,结果定位准确可靠,手术切口小,组织损伤少[15],说明快速准确的定位能够有效提高手术安全性。
综上所述,使用妇科达芬奇机器人手术腹壁定位标尺,可精准鞘卡切口位置,保护机器人用物,节约了准备时间,提高了工作效率,且增强了机器人用物的安全性,临床效果评价较常规方法优势明显,值得推广应用。但其应用仅限于几种术式,如何改良应用,增加其应用范围,值得进一步研究。
[参考文献]
[1]程勤,张玲琳,王家玲,等.UVB例达芬奇机器人手术护理配合关键点探讨[J].局解手术学杂志,2013,22(5):546-547.
[2]周娅颖,魏静蓉,张琦霞,等.达芬奇机器人手术器械的清洗与灭菌[J].局部解剖学杂志,2011,20(6):601-605.
[3]李鸿浩,刘雪梅,昝懿恒,等.达芬奇机器人手术系统在我国胸心外科应用的科学性和伦理学系统评价[J].中国胸心血管外科临床杂志,2014,21(3):380-388.
[4]丁仁泉,童向东,许世广,等.达芬奇机器人手术系统与电视胸腔镜在胸内纵隔疾病手术治疗中的对比研究[J].中国肺癌杂志,2014,12(7):557-562.
[5]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-972.
[6]张小磊.应用达芬奇机器人手术系统治疗胃癌的临床研究[D].南京:南京大學,2012.
[7]张大坤,许世广,丁仁泉,等.达芬奇机器人手术与胸腔镜辅助小切口手术对肺手术患者创伤对比分析[J].创伤与急危重病医学,2014,2(5):296-300.
[8]丁海峰,邵志民,王传铸,等.CATIA软件轮胎三维设计中的应用[J].轮胎工业,2004,1(4):199-202.
[9]赵子健.机器人辅助全膝关节置换手术系统的研究及其在临床前的应用[D].上海:上海交通大学,2009.
[10]吕宏伟.机器人辅助微创手术视觉导航定位系统研究[D].长春:吉林大学,2008.
[11]赵子健.机器人辅助全膝关节置换手术系统及其关键视觉技术分析[D].济南:山东大学,2005.
[11]Gala RB,Margulies R,Steinberg A,et al.Systematic review of robotic surgery in gynecology:robotic techniques compared with laparoscopy and laparotomy[J].J Minim Invasive Gynecol,2014,21(3):353-361.
[12]Gehrig PA,Cantrell LA,Shafer A,et al.What is the optimal minimally invasive surgical procedure for endometrial cancer staging in the obese and morbidly obese woman?[J].Gynecol Oncology,2008,111(1):41-45.
[14]肖荣贤.腹壁标尺定位小切口输尿管取石术(附25例分析)[J].中国临床研究,1996,19(3):175-176.
[15]Little RM, Deal AM, Zanation AM, et al.Occupational hazards of endoscopic surgery[J].Int Forum Allergy Rhinol,2012,2(3):212-216.
(收稿日期:2016-12-26 本文编辑:任 念)
