某高速着陆无人机方向舵纠偏控制设计及性能分析
2017-04-05李洁玉聂宏魏小辉尹乔之
李洁玉,聂宏,2,魏小辉,2,尹乔之
(1.南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京 210016)(2.南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)
某高速着陆无人机方向舵纠偏控制设计及性能分析
李洁玉1,聂宏1,2,魏小辉1,2,尹乔之1
(1.南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京 210016)(2.南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)
无人机高速着陆过程中,由于侧风或初始干扰导致的滑跑侧偏极其危险。基于高速状态下方向舵纠偏效率高的特点,建立某无人机高速着陆动力学模型,设计方向舵纠偏控制策略,并基于Matlab/Simulink平台建立无人机滑跑非线性动力学模型及方向舵纠偏控制模型;对具有初始1°偏航角和1 m/s持续垂直侧风情况下的无人机着陆工况进行仿真分析,并通过控制着陆速度、着陆初始姿态角和侧风强度,分析纠偏控制系统的性能。结果表明:所设计的纠偏控制系统具有一定的航向纠偏和抗持续侧风能力,最大侧偏距小于3 m,偏航角小于5°,较好地实现了高速滑跑阶段的侧向纠偏性能。
无人机;高速着陆;方向舵纠偏;动力学;Matlab/Simulink
0 引 言
随着无人机应用领域的拓宽,对无人机的性能提出了更高要求[1],临近空间的开发利用进一步促进了高速无人机的发展。高速无人机以轮式滑跑为主要起降方式,因此地面滑跑侧向纠偏控制成为无人机安全滑跑的关键[2-3]。
地面滑跑侧向纠偏控制系统能够根据无人机的侧偏距、偏航角反馈选择相应的纠偏部件来实现无人机的偏差纠正,保证无人机在安全范围内滑跑[4]。目前,我国关于无人机地面滑跑侧向纠偏控制方面进行了一些研究,例如,陈磊等[5]建立了飞翼无人机主轮差动刹车纠偏模型,宋荣志等[6]建立了无人机起飞滑跑前轮与方向舵联合纠偏模型,S.Dong等[2]运用动态分配增益算法进行前轮与差动刹车主动控制纠偏。但上述研究均是针对较低滑跑速度无人机实现纠偏,且单独将方向舵作为纠偏部件的研究鲜有报道。高速无人机的着陆速度高达70 m/s,高速滑跑阶段无法启动刹车系统和前轮转向机构,而方向舵作为航向控制操纵机构,高速阶段具有较高的气动效率,可以实现高速滑跑阶段的侧向纠偏[7]。
本文以高速无人机为研究对象,研究其高速滑跑阶段方向舵纠偏系统的设计,并建立无人机滑跑动力学数学模型,对具有初始偏航角和持续侧风工况下的高速无人机进行滑跑仿真分析,以期实现无人机高速滑跑过程的侧向纠偏。
1 滑跑动力学模型的建立
1.1 无人机平台
本文以固定翼无人机为研究对象,采用V型尾翼融合式机翼布局,机翼后缘布置有副翼,V尾后缘布置有升降舵和方向舵。无人机外形主要几何参数如表1所示。
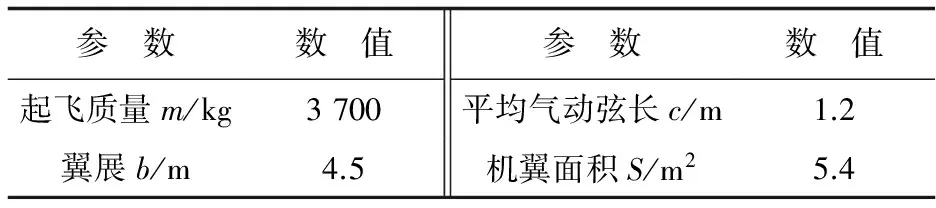
表1 无人机外形主要几何参数
1.2 坐标系定义及转换
根据需要共定义四个坐标系,分别为:地面坐标系Ogxgygzg、机体坐标系Oxbybzb、气流坐标系Oxayaza和稳定坐标系Oxsyszs,前三个坐标系的定义详见文献[8]。稳定坐标系Oxsyszs是为了研究轮胎与地面间的作用力而定义的,与无人机固联并随其运动。取无人机的质心作为原点,Oxs轴与无人机基准运动飞行速度在对称平面的投影方向一致;Ozs位于纵对称平面内并垂直Oxs轴,指向下;Oys垂直于纵对称平面,指向右。无人机与地面作用力均在稳定坐标系中定义。各坐标系之间的转换关系如图1所示,ψ、θ、φ分别为偏航角、俯仰角和滚转角;α、β分别为迎角和侧滑角。
1.3 滑跑受力分析
无人机在着陆滑跑阶段受到空气动力、地面支持力、地面摩擦力、自身重力等以及各个力对无人机质心的作用力矩的共同作用。在相应的坐标轴系中对无人机进行系统地受力分析是准确建立动力学模型的基础。无人机受力分析示意图如图2~图3所示。
下面进行具体的受力分析,所有表达式均在机体坐标系中表示。
(1) 重力
LbgG=Lbg[0 0mg]T
=[-mgsinθmgcosθsinφmgcosθcosφ]T
(1)
重力作用线通过重心,对无人机质心作用力矩为0。
(2) 气动力和气动力矩
LbaR=Lba[-DC-L]T
(2)
(3)

(3) 地面支持力
LbgP=Lbg[0 0 -(Pn+Pml+Pmr)]T
(4)
(5)
式中:P为地面对无人机的总支持力;Pn、Pml、Pmr分别为地面对飞机前轮、左主轮、右主轮的支持力;bw为主轮距;an为前轮到无人机重心投影的距离;am为主轮到无人机重心投影的距离。
(4) 地面摩擦力
无人机地面滑跑时,在地面侧向力的作用下,轮胎的行驶方向与轮胎平面间有侧偏角βe[9],侧向力N与轮胎侧偏角βe的关系十分复杂,但当侧偏角很小(βe<5°)时,可以认为轮胎侧向力与侧偏角近似为线性关系。
则轮胎侧向力为
(6)
式中:βml、βmr、βn分别为左主轮侧偏角、右主轮侧偏角和前轮侧偏角,单位均为rad,其计算方法参见文献[10]。
设机轮与地面的摩擦系数分别为μn、μml、μmr,其中μn为前轮滚动摩擦系数,μml和μmr分别为无人机地面滑跑时左、右机轮与地面的结合系数。
机轮受到的摩擦力与地面支持力的关系为
(7)
地面对机轮的侧向力与摩擦力作用合力及合力矩为
(8)
(9)
其中,
(10)
式中:h1为前轮轮胎到无人机水平基准线的距离;h2为主轮轮胎到无人机水平基准线的距离;H为无人机中心高度。
综上所述,无人机滑跑受力和力矩在机体坐标系下的分量为
[FxFyFz]T=LbgG+LbaR+LbgP+Lbff
(11)
[MxMyMz]T=MT+MR+MP+Mf
(12)
式中:Fx、Fy、Fz分别为无人机合力在机体坐标系下x轴、y轴和z轴的作用分力;Mx、My、Mz分别为无人机合力矩在机体坐标系下x轴、y轴和z轴的作用力矩。
1.4 无人机滑跑非线性模型的建立
本文重点研究无人机的纠偏控制策略,将无人机系统看作刚体,不考虑由于各部件的弹性变形以及起落架缓冲机构所导致的部件间的相对运动和相互作用力。无人机有六个自由度,对应六个动力学方程,以及六个描述无人机在空间位置和姿态的运动学方程。
(1) 线动力学方程组
(13)
式中:u、v、w分别为速度在机体坐标系下的分量,单位为m/s;p、q、r分别为滚转角速率、俯仰角速率和偏航角速率。
(2) 角动力学方程组
(14)
c1~c9分别为与无人机机体质量相关的量:
(15)
(3) 运动学方程组
根据Euler关系,机体坐标系下的角速率与欧拉角的关系为
(16)
地面惯性坐标系下位置和机体速度的关系为
(17)
将1.3节分析的作用力带入构成无人机地面滑跑全量非线性运动数学模型。为了重点研究滑跑阶段的侧向纠偏控制,只给出侧向的简化模型,忽略三轮滑跑阶段无人机横向和纵向的姿态变化。则滑跑动力学模型可简化为
(18)
上述受力分析过程及动力学方程求解过程均基于Matlab/Simulink平台实现。
2 方向舵纠偏控制器设计
方向舵是无人机飞行姿态控制中不可或缺的操纵舵面,它主要通过产生附加气动力及其产生的气动力矩控制偏航运动[11]。无人机高速着陆时,刹车系统与前轮转向机构均不能启用,因此,无人机高速滑跑阶段的侧向纠偏任务主要由方向舵承担。
方向舵纠偏原理如图4所示,当无人机出现右偏航角度时,方向舵向左偏转产生附加侧向力矩,使得无人机机头向右偏转,但与此同时,其产生的向右的侧向力会将无人机向右拉离跑道中心线,产生侧偏距。因此,方向舵纠偏控制是一个需要合理分配权重的系统。
本文主要研究控制策略,故对伺服电机等作动机构均不进行详细建模,且伺服电机通常可以简化为一阶惯性环节,上升时间较快,可以忽略其对控制系统的响应影响。
选择双模态控制方法[12]比例微分(PD)控制,比例环节对系统输入与实际输出之间的偏差e(t)进行比例放大与调节[13],微分环节反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前及时在系统中引入一个有效的早期修正信号,从而加快系统的动态响应,减少调节时间。因此,方向舵纠偏系统舵面偏转指令可以表示为
(19)

3 仿真分析
在无人机滑跑过程中,最常见的侧向干扰包括着陆初始偏航角和侧风干扰,垂直侧风是比较恶劣的情况[15]。在垂直侧风条件下设计的侧向纠偏控制系统具有更好的鲁棒性,故侧风干扰选为持续垂直侧风干扰。
为了方便对比,对未加纠偏控制系统和加入侧向纠偏控制系统的滑跑过程均加入侧向干扰进行仿真分析,验证纠偏控制系统的有效性和可行性。
3.1 无纠偏控制系统滑跑工况仿真
选取两个具有代表性的高速滑跑工况进行仿真分析:①滑跑速度为70 m/s,具有1°初始偏航角,无侧风干扰;②滑跑速度为70 m/s,无初始偏航角,加入速度为1 m/s的持续垂直侧风。
在不加纠偏控制系统的情况下,对高速滑跑两个工况进行仿真分析,响应曲线分别如图6~图7所示。
从图6~图7可以看出:在高速情况下,即使只存在1°偏航角或1 m/s的持续垂直侧风,无人机都有可能以一定的侧向速度滑出跑道,非常危险,表明无人机滑跑过程中对侧向偏差进行及时纠正是十分必要的。
3.2 方向舵控制纠偏仿真
以方向舵为纠偏部件对高速滑跑阶段两个工况进行仿真分析,响应曲线分别如图8~图9所示。
从图8可以看出:在高速滑跑阶段存在1°初始偏航角情况下,使用方向舵进行纠偏,经过15 s的调节,侧偏距离、偏航角等均回归至0,无人机完全回归到跑道中心线位置进行滑跑。在此过程中,由于无人机初始右偏,方向舵正向偏转,形成负的偏航力矩使无人机产生向左偏的趋势和运动,同时产生向右的侧力将无人机拉离跑道。检测到此信号,方向舵反向偏转,产生向左的侧力,调节侧偏距,同时产生正的偏航力矩,将无人机姿态调节至正航向。整个过程是侧偏距和偏航角的控制权重分配过程,产生的最大侧偏距为2.75 m,最大偏航角为-3.60°,均在安全范围内。
从图9可以看出:当3 s时加入垂直侧风影响后,方向舵右偏,产生附加偏航力矩使机头迎风,减小侧滑角,附加侧力加速了无人机向跑道左侧的偏离,经过7 s调节,侧向偏移距离最终保持在跑道中心线左侧1.7 m,以存在1°偏航角的姿态向前滑行,即侧航法滑跑。
方向舵纠偏滑跑仿真结果如表2所示。
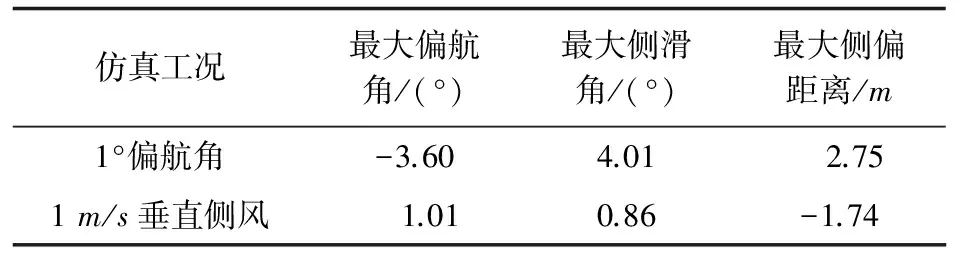
表2 方向舵纠偏滑跑仿真结果
3.3 纠偏系统性能分析
在无人机着陆滑跑过程中,存在诸多能够影响纠偏控制系统响应的因素,例如滑跑速度、着陆初始姿态角、侧风的强度等。以下通过控制变量法对方向舵纠偏控制系统性能进行分析。
(1) 滑跑速度
着陆速度是无人机着陆过程中最重要、最关键的参数之一,也是纠偏系统性能的首要影响因素。对分别具有初始1°偏航角和1 m/s垂直侧风的着陆工况,在不同着陆速度下进行滑跑纠偏仿真,纠偏过程中出现的最大侧偏距离如图10~图11所示。
从图10可以看出:无人机在具有1°初始着陆偏航角情况下进行着陆时,随着着陆速度的减小,无人机滑跑侧向速度分量减小,滑跑过程中侧偏距离也相应减小。当着陆速度低于56 m/s时,方向舵气动效率衰减,其纠偏控制系统失去纠偏能力。
从图11可以看出:在具有1 m/s垂直侧风时,着陆滑跑速度越大,无人机侧偏距离越小;着陆滑跑速度越低,侧偏距离呈现略微非线性增加,即低速着陆时无人机抵御持续侧风的能力变弱。
(2) 初始偏航角
无人机以70 m/s着陆速度滑跑时,不同的初始偏航角对纠偏滑跑过程中侧偏距离的影响如图12所示。
从图12可以看出:当无人机以70 m/s的速度进场着陆,纠偏滑跑过程中产生的最大侧偏距离与初始偏航角成正比,初始偏航角越大,纠偏过程产生的侧偏距离越大。当初始偏航角大于1.4°时,方向舵纠偏控制系统纠偏过程发散,不能完成纠偏。
(3) 侧风速度
在不同的侧风情况下,无人机在纠偏控制系统控制作用下产生的侧偏距离如图13所示。
从图13可以看出:在70 m/s高速着陆工况下,无人机在方向舵纠偏控制系统下可抵御风速小于7 m/s的侧风,偏离跑道中心线左侧的最大距离为12 m,在安全滑跑范围内;当无人机以相同速度着陆时,侧风强度越小,产生的侧向偏移距离越小,且侧偏距离与侧风速度近似呈线性关系。
4 结 论
(1) 在无人机高速着陆滑跑过程中,方向舵可以作为纠偏部件对无人机航向偏差进行纠正。
(2) 对于具有初始1°偏航角着陆工况,方向舵纠偏系统可以将无人机姿态完全调整至跑道中心线位置进行滑跑,产生的最大侧偏距离为2.75 m,最大偏航角为-3.60°,均在安全范围内。
(3) 方向舵纠偏系统具有一定的抗侧风能力,对于1 m/s持续侧风情况,方向舵纠偏使得无人机以1°偏航角姿态保持在沿跑道中心线左侧1.7 m处滑跑,在跑道安全范围内。
(4) 方向舵纠偏控制系统在纠偏过程中产生的最大侧偏距离受着陆速度、初始偏航角和侧风强度的影响。在具有初始偏航角情况下,着陆滑跑侧向偏移距离与着陆速度、初始偏航角成正比关系;对于侧风着陆情况,无人机着陆滑跑速度越高,方向舵纠偏控制系统的抗侧风能力越强。
[1] 殷奎龙. 高速无人机飞行控制系统设计及软件开发[D]. 大连: 大连理工大学, 2014. Yin Kuilong. Flight control system design and software development for high velocity UAV[D]. Dalian: Dalian University of Technology, 2014.(in Chinese)
[2] Dong S, Jiao Z, Sun X, et al. Dynamic allocation algorithm for the gain of UAV nose wheel steering and differential braking based on decomposition control[C]. 2016 IEEE/CSAA International Conference on Aircraft Utility Systems(AUS), 2016.
[3] 段镇, 高九州, 贾宏光, 等. 无人机滑跑线性化建模与增益调节纠偏控制[J]. 光学精密工程, 2014, 22(6): 1507-1516. Duan Zhen, Gao Jiuzhou, Jia Hongguang, et al. Linearized modeling and gain scheduling control for UAV taxiing[J]. Optics and Precision Engineering, 2014, 22(6): 1507-1516.(in Chinese)
[4] 郝现伟, 杨业, 贾志强, 等. 无人机着陆滑跑数学模型与纠偏控制[J]. 电机与控制学报, 2014, 18(5): 85-92. Hao Xianwei, Yang Ye, Jia Zhiqiang, et al. Mathematic model and deviation-correction control for UAV taxiing[J]. Electric Machines and Control, 2014, 18(5): 85-92.(in Chinese)
[5] 陈磊, 陆宇平, 吴在桂. 飞翼无人机主轮差动刹车系统的建模与仿真[J]. 计算机技术与发展, 2009, 19(6): 186-189. Chen Lei, Lu Yuping, Wu Zaigui. Modeling and simulation of flying wing UAV main wheel differential brake system[J]. Computer Technology and Development, 2009, 19(6): 186-189.(in Chinese)
[6] 宋荣志, 李艳辉, 厉明. 无人机地面滑跑前轮方向舵联合纠偏控制系统设计[J]. 计算机测量与控制, 2015, 23(9): 3056-3059. Song Rongzhi, Li Yanhui, Li Ming. Design of lateral deviation correction control for UAV taxiing with node wheel and rudder[J]. Computer Measurement & Control, 2015, 23(9): 3056-3059.(in Chinese)
[7] Cervantes L, Castillo O. Type-2 fuzzy logic aggregation of multiple fuzzy controllers for airplane flight control[J]. Information Sciences, 2015, 324(3): 247-256.
[8] Nelson R C. Flight stability and automatic control[M]. USA: WCB/McGraw-Hill, 1989.
[9] 姜伟, 谢利理, 雒雪芳. 基于MATLAB与VC混合编程的飞机刹车系统仿真[J]. 计算机测量与控制, 2006, 14(10): 1413-1416. Jiang Wei, Xie Lili, Luo Xuefang. Simulation of aircraft braking system based on MATLAB and VC++ combined programming[J]. Computer Measurement & Control, 2006, 14(10): 1413-1416.(in Chinese)
[10] 冀美珊. 飞机全电刹车系统的建模与滑跑纠偏控制研究[D]. 南京: 南京航空航天大学, 2012. Ji Meishan. Research on modeling and taxiing rectification control of the aircraft electric braking system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012.(in Chinese)
[11] Mamonova T, Syryamkin V, Vasilyeva T. Modelling of the automatic stabilization system of the aircraft course by a fuzzy logic method[C]∥IOP Conference Series: Materials Science and Engineering, 2016, 124(1): 012075.
[12] Driels M. Linear control systems engineering[M]. USA: McGraw-Hill, 1996.
[13] Ogata K. Modern control engineering[M].3rd ed. New Jersey: Prentice-Hall Englewood Cliffs,1999.
[14] Wang Y, Wang Y. Lateral deviation correction control for UAV taxiing[J]. Acta Aeronautica et Astronautica Sinica, 2008(S1): 142-149.
[15] 邓寅平, 范彦铭. 无人机四轮滑跑纠偏控制系统设计与仿真[J]. 系统仿真学报, 2008(21): 5929-5935. Deng Yinping, FanYanming. Design and simulation of ground taxiing system for UAV with four wheels[J]. Journal of System Simulation, 2008(21): 5929-5935.(in Chinese)
(编辑:马文静)
Design and Performance Analysis of the Rudder Deviation Correction Control for a High-speed Landing UAV
Li Jieyu1, Nie Hong1,2, Wei Xiaohui1,2, Yin Qiaozhi1
(1.Key Laboratory of Fundamental Science for National Defense-advanced Design Technology of Flight Vehicle, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China) (2.State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
During the high-speed landing for unmanned aerial vehicle(UAV), the deviation caused by crosswind or initial interference is very dangerous. Based on the characteristics of rudder with high efficiency at high speed, the high speed landing dynamic model of UAV is established, and the rudder deviation control strategy is designed. Further, the non-linear dynamics model of UAV and rudder deviation correction control system are established on Matlab/Simulink platform to simulate under the situations with initial 1° yaw angle or 1 m/s continuous vertical crosswind. The performance of the system is analyzed by controlling the landing speed, the initial landing yaw angle and crosswind strength. The simulation results show that the rudder deviation correction control system is able to correct deviation and resist certain crosswind. In the correcting process, the maximum lateral deviation is less than 3 m and the yaw angle is less than 5°, which means the system could realize lateral deviation correction.
UAV; high-speed landing; rudder deviation correction; dynamics; Matlab/Simulink
2016-12-16;
2016-12-28
国家自然科学基金(51305198) 江苏高校优势学科建设工程资助项目 机械结构力学及控制国家重点实验室(南京航空航天 大学)自主研究课题资助(0214G01)
聂宏,hnie@nuaa.edu.cn
1674-8190(2017)01-084-08
V279
A
10.16615/j.cnki.1674-8190.2017.01.013
李洁玉(1992-),女,硕士研究生。主要研究方向:飞行器起落装置设计技术。
聂 宏(1960-),男,博士,教授,博导。主要研究方向:飞行器起落装置设计技术、飞行器结构抗疲劳设计。
魏小辉(1978-),男,博士,教授,博导。主要研究方向:飞行器起落装置设计技术、飞行器CAD/CAE与飞行仿真。
尹乔之(1990-),女,博士研究生。主要研究方向:飞行器起落装置设计技术、非线性动力学与控制。
