AIS数据中单船操纵模式辨识
2017-04-02马文耀吴兆麟李伟峰杨家轩
马文耀, 吴兆麟, 李伟峰, 杨家轩
(大连海事大学 航海学院, 辽宁 大连 116026)
当前根据轨迹数据分析移动对象的行为已成为交通领域的研究热点。[1]通过分析轨迹数据,观察目标随时间序列的变化并进行剖析,得到运动个体高层次的行为描述。在道路交通安全方面,主要从避免“交通堵塞”的角度,利用车辆个体轨迹分析驾驶员的出行习惯和驾驶习惯[2],重点识别交通拥堵高发的时段和地段,推荐个人出行路线。[3-4]在船舶行为研究方面,主要从 “交通安全”的角度研究船舶避让的方法和规律。[5]船舶避让措施一般为转向和(或)变速[6],避让时机和采取避让措施的位置会在很大程度上影响避让安全。同时,船舶操纵行为是船与船之间及船与外界环境之间的相互作用,能通过船舶运动轨迹有效地描述出来。因此,从轨迹中挖掘出避让时机和采取避让措施的位置等信息有助于识别及理解船舶操纵行为。
船舶自动识别系统(Automatic Identification System,AIS)不仅能保障船舶的航行安全,还可获取更高级别的海上情境意识。[7]尽管AIS的覆盖范围有限,只能反映局部区域的海上交通,但其具有全球统一的标准,通过融合多个AIS数据源,可用于分析全球海上交通。随着各国AIS基站网络的建立和星载AIS群的出现,AIS已成为近乎实时的全球海上交通信息来源。[8]海量的AIS船舶运动轨迹数据包含有丰富的船舶交通模式和驾驶行为习惯等信息[9],通过充分挖掘这些信息,可为船舶驾驶行为研究和异常行为检测提供决策支持。
船舶AIS轨迹数据能描述船舶空间位置及属性随时间的变化。海上交通研究关注的对象一般包括运动船舶、空间区域、时间特征和运动事件。轨迹特征通常既包括最原始的位置和时间参数,也包括间接得到的距离、方向、空间分布和加速度等参数。由于这些特征过于简单,无法反映单船操纵行为,导致可检测的船舶异常行为类型有限,甚至无法发现某些 “重点关注水域”。
根据船舶操纵行为特性,结合船舶运动学约束条件,增加轨迹特征维度,将船舶操纵行为引入AIS轨迹特征中,使其对应船舶具体操纵模式,提出一种从AIS轨迹数据中自动辨识单船操纵模式的方法。
1 轨迹中船舶操纵行为建模
1.1 船舶操纵行为
船舶操纵行为是指控制船舶在水中运动的行为。船舶驾驶员根据船舶的操纵性能和车、舵效应,结合风、流和水域等客观条件,运用船舶推进器、舵、锚、缆和拖船来保持或改变船舶的运动状态。
船舶轨迹是船舶在一段时间内的操纵过程在空间上的体现,因此蕴含船舶操纵过程。由于船舶操纵过程是由一系列操纵行为(机动行为)构成的,因此操纵行为能用模型实例化,并能以可识别的操纵模式体现。AARSAETHER等[10]将船舶操纵模式分为航向基本恒定和航向变化机动2类。这种基于最简单的几何模型建立的单船操纵行为辨识模型不能充分体现制动、加速、大幅度转向和小角度转向等船舶操纵模式。根据船舶操纵行为,可进一步对航向基本恒定和航向变化机动进行细分,结果见图1。
1.2 船舶操纵行为特征
通过对有限时间窗内特定船舶轨迹的运动进行分析,可识别出需重点关注的船舶行为。根据操纵行为的不同,将船舶AIS轨迹分成不同类型的航段,每个航段对应1种操纵模式,每种模式具有若干个运动学特征。根据不同的运动学约束条件, 将AIS轨迹划分为匀速航段、制动航段、加速航段、停留航段、弱偏航航段、强偏航航段和其他航段等航段。各航段分别与图1中的操纵行为模式对应。
1) 匀速航段:在整个航段内,线速度不为0,线加速度和角加速度接近于0,对应“匀速航行”模式。
2) 制动航段:在整个航段内,线加速度小于某个负数的阈值,对应“减速”模式。
3) 加速航段:在整个航段内,线加速度大于某个正数的阈值,对应“加速”模式。
4) 停留航段:在整个航段内,线性速度接近于0,对应“停留”模式。
5) 弱偏航航段:角速度接近于一个定值,开始点和结束点的航向差在某个阈值内。若航向差为正,则为右舵弱偏航航段,对应“右舵小角度”模式;否则为左舵弱偏航航段,对应“左舵小角度”模式。
6) 强偏航航段:角速度接近于一个定值,结束点和开始点的航向差在某个阈值内,其阈值大于弱偏航阈值。若航向差为正,则是右强偏航航段,对应“大幅度右转”模式;否则为左强偏航航段,对应“大幅度左转”模式。
7) 其他航段:在整条船舶轨迹中,已提取的常规航段以外的航段为不规则航段。这些航段通常或多或少涉及一些类似痉挛的动作,即线性和角加速度均不为0。不规则航段近似认为是“匀速航行”模式。
1.3 轨迹数据中单船操纵行为模型
船舶操纵行为也可称为机动行为,反映船舶的运动过程。运动轨迹中每3个点就构成1个运动过程,即每3个轨迹点蕴含1个船舶操纵行为事件。通过等时间间隔采样3个轨迹点,得到该过程中的船舶操纵行为。图2为船舶操纵模式辨识示意。图2a)中:pi与相邻的pi-1点和pi+1点的采样时间间隔为Δt;vin,i为轨迹段pi-1pi的矢量速度;vout,i为轨迹段pipi+1的矢量速度。vin,i和vout,i的计算式为
(1)
(2)
v=(VSOG,CCOG)
(3)
在航海上,速度矢量可用VSOG或CCOG来表示(如图2b)所示),其中,VSOG为船舶对地速度,CCOG为船舶对地航向。为划分各航段的操纵行为模式,设定4个门限(VTZero,aTAcceleration,aTWeak,aTSharp),

a)轨迹点间的运动示意b)速度矢量在航海上的分解示意
图2 船舶操纵模式辨识示意
其中VTZero为接近于0的速度值。船舶在锚泊时,即使自身停止运动,受风和流影响,仍有一定的对地速度。因此,须设定VTZero门限。当船舶速度小于VTZero时,认为船舶处于“停留”状态。aTAcceleration为船舶加速度,船舶航行时,受不规律风、浪影响,即使车钟状态始终不变,其加速度仍在微弱变化,故须设定aTAcceleration,仅当船舶加速度达到一定程度(即超过该门限)时,才判定船舶进行变速机动。aTWeak和aTSharp为航向变化率,即船舶航向每分钟改变的度数。船舶以自动舵模式航行时,沿预定航向前进,受外界风、浪和流联合作用,其运动轨迹呈“S”形,几乎是沿预定航向左右摆动;当船舶偏离预定航向一定程度之后,会慢慢转回至预定航向。这种船舶左右偏摆运动与船舶转向机动的区别主要在于航向变化率。当船舶的航向变化率小于aTWeak时,认为船舶做“S”形摆动,近似认为做直线运动;当船舶的航向变化率在aTWeak与aTSharp之间时,认为船舶做小角度转向机动;当船舶的航向变化率大于aTSharp时,认为船舶做大角度转向机动。
为比较与Pi点相连的上、下2个航段的操纵模式,定义船舶速度变化率和航向变化率,分别用as和ac表示,计算式为
(4)
(5)
根据不同的运动学约束条件,提出船舶操纵模式辨识模型,辨识规则为:
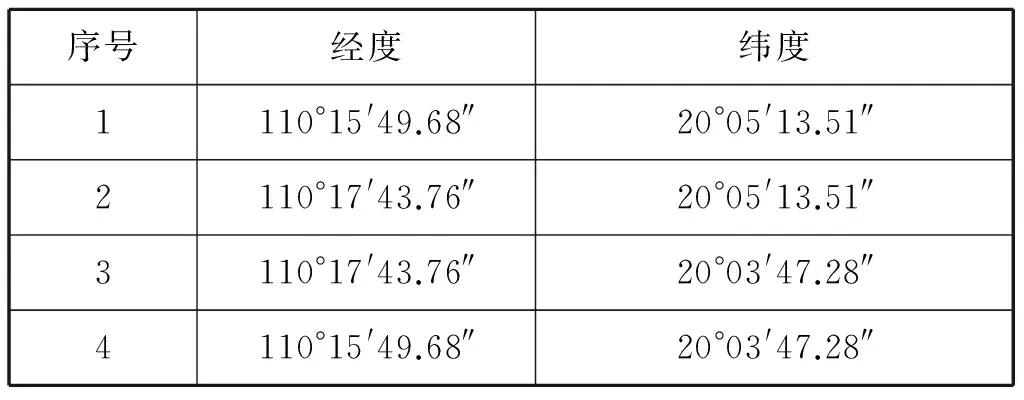
1) 若VSOG,in,i>VTZero,VSOG,out,i>VTZero,|as| 2) 若as<0 且 |as|>aTAcceleration,则认为pi处船舶操纵行为属于减速航行行为。 3) 若as>0且|as|>aTAcceleration,则认为pi处船舶操纵行为属于加速航行行为。 4) 若VSOG,in,i 5) 若ac<0 且aTWeak<|ac| 6) 若ac>0 且aTWeak<|ac| 7) 若ac<0 且 |ac|>aTSharp,则认为pi处船舶操纵行为属于左舵强偏航行为。 8) 若ac>0 且 |ac|>aTSharp,则认为pi处船舶操纵行为属于右舵强偏航行为。 门限阈值的选择对操纵行为模式的辨识起到关键性作用。门限阈值的大小由船舶操纵性能决定。转向性差的船舶,其舵效较差,单位时间内的航向改变量较小。即使驾驶员操相同的舵角,其转向率变化幅度也较小。因此,对于操纵性差的船舶,其aTSharp设置得略小一些。若船舶的保向性好,船舶轨迹“S”形摆动幅度相对较小,则其aTWeak应设置得小一些。若船舶的转向性好,则操相同转舵角能获得更高的转向率,aTSharp应设置得更大一些。船舶的操纵性好,其加速性能和制动性能就会更好,船舶稍微增减档位,航速立刻发生变化,因此aTAcceleration应设置得偏大一些。 船舶的操纵性能与船舶类型、尺度和天气海况密切相关,需研究这些因素对阈值参数的影响。 1.4.1船舶类型对阈值参数的影响 船舶类型一般分为客船、集装箱船、散货船、油船和渔船。就操纵性能而言,客船、集装箱船、散货船、油船和渔船的操纵性能依次下降。因此,aTAcceleration和aTSharp应依次偏大,而aTWeak应依次偏小。例如,集装箱船的操纵性比油船好,加速和减速比油船更迅速,因此集装箱船的aTAcceleration应比油船的大。由于油船的保向性比较差,因此其aTWeak门限设定应比集装箱船略大。 1.4.2船舶尺度对阈值参数的影响 对于同种船型,小尺度船舶的操纵性明显优于大尺度船舶。因此,小尺度船舶的aTWeak应设置得偏小,而aTSharp应设置得偏大。 1.4.3天气和海况对阈值参数的影响 船舶的操纵性与天气、海况密切相关。船舶在天气、海况状况良好条件下的操纵性明显优于在恶劣天气条件下的操纵性。因此,天气、海况良好条件下的aTWeak设置得比恶劣天气海况下的小一些,而aTSharpp设置得偏大一些。 针对不同天气海况、不同种类(油船、集装箱船、客滚船和散货船)和不同尺度的船舶,通过实船操纵性调研并根据相关领域专家的分析,确定船舶操纵行为辨识模型中的门限阈值,建立船舶操纵行为辨识参数知识库。 辨识过程:根据海上移动通信业务标识码(Maritime Mobile Service Identity, MMSI)(或船名)及开始时刻和结束时刻,从AIS原始数据中提取出某段时间内单船的原始轨迹,并对该轨迹进行数据清洗、插值和等时间间隔采样,得到单船等时间间隔采样轨迹。对轨迹上的各个点进行操纵行为模式辨识,为各轨迹点添加表示操纵模式行为语义的属性。最后得到带有船舶操纵行为模式语义的单船轨迹。具体操纵模式辨识流程见图3。 船舶轨迹点由船舶采样点位置、采样时间、对地速度(Speed Over Ground, SOG)、对地航向(Course Over Ground, COG)、航行状态、转向速率和MMSI码等构成。该船的这些采样点数据信息根据采样时间先后顺序构成轨迹点序列。根据船舶的MMSI码及输入的开始时刻和结束时刻,并按时间先后排序,采用SQL 查询语句迅速从AIS数据库中提取出该条船舶轨迹,即该船的单船原始轨迹。 船舶有时会发送超出岸台AIS接收范围的AIS消息,导致该船舶轨迹不全;船舶AIS设备发生故障会导致轨迹中出现部分错误或轨迹缺失等。[14-15]这些因素都会影响到单船轨迹操纵行为的分类和识别,因此需对AIS数据进行清洗。 由于AIS设备以不同时间间隔(2~360 s)发送消息,导致基于AIS的单船轨迹点之间的时间间隔不一致。须对单船AIS轨迹数据进行插值,并根据指定的时间间隔进行采样,得到等时间间隔的单船轨迹。 根据船舶的MMSI码,从AIS信息中获取船舶静态信息,包括船舶类型、船舶长度、天气和海况,从门限数据库中得到该船的操纵模式辨识参数。 逐一对单船轨迹的各轨迹点进行操纵模式辨识,将得到的操纵模式类别作为该点的船舶操纵行为特征保存到该点中,最终获得带有船舶操纵模式的单船轨迹。 以琼州海峡2015年5月份的AIS数据集为研究数据,提取763艘船舶的运动轨迹,基于这些数据辨识船舶操纵模式,提取单船的“停留”“匀速航行”“加速”“减速”“小幅度左转”“小幅度右转”“大幅度左转”和“大幅度右转”等8 种操纵模式。采样时间间隔设置为60 s,VTZero=0.4,aTAcceleration=1.2,aTWeak=2,aTSharp=10,获得带有操纵模式的船舶轨迹。图4为某散货船的带有操纵模式的船舶轨迹。用4个矩形框对图4中的船舶轨迹进行划分,将其编号为①~④。图5为这4个矩形区域的放大图。 图5a)中,点A1的模式为“小幅度左转”,点B1的模式为“小幅度右转”,点C1的模式为“加速”,点D1的模式为“减速”,点B1与点C1之间的轨迹点的模式为“匀速航行”,点E1的模式为“大幅度右转”。船舶在矩形区域①中航行,在点A1~点B1采取小幅度调整,船舶从琼州海峡西行通航分道的右侧慢慢移动到分道的左侧。 a)矩形区域1放大图b)矩形区域2放大图 c)矩形区域3放大图d)矩形区域4放大图 图5 4个矩形区域的放大图 图5b)中,点A2的模式为“小幅度左转”,点B2的模式为“小幅度右转”,点C2的模式为“大幅度左转”,点D2的模式为“加速”。船舶在矩形区域②中航行,先在西行分道中航行,然后小幅度左转调整进入警戒圈,随后再大幅度左转,航向变为185°,即南北向航行。 图5c)中,点A3的模式为“小幅度左转”,点B3的模式为“大幅度左转”,点C3的模式为“减速”,点D3的模式为“小幅度右转”。从矩形区域③中可看出,船舶先匀速航行一段,然后小幅度左转,随后大幅度左转并减速进入某个区域,最终停止。 图5d)中,点A4和点B4的模式为“大幅度右转”,点C4和点D4的模式为“大幅度左转”,点E4的模式为停留,且轨迹中点E4之后的轨迹点的模式均为“停留”。矩形区域④中轨迹点信息见表1。 海口秀英港No.4作业、防台锚地区域为矩形,矩形顶点坐标值见表2。从表1和表2中可看出,这些点所处区域为秀英港No.4作业、防台锚地,船 表1 矩形区域4中轨迹点信息 舶在点A4~点D4在锚地内航行,但没有抵达锚位。船舶到达锚位后抛锚,点E4以后轨迹点速度均为0,处于锚泊状态。辨识结果与实际状态一致。 表2 海口秀英港No.4作业、防台锚地 根据船舶操纵规律和运动学约束条件,建立船舶操纵模式模型,提出一种从AIS数据中自动辨识单船操纵模式的方法。利用该方法对琼州海峡内船舶的航行轨迹进行单船操纵行为模式辨识。试验结果表明,该方法能有效识别出所需的船舶操纵行为模式,如大幅度转向。结合地理场景知识,有助于进一步了解船舶操纵意图。由单船操纵模式辨识结果可知:小幅度转向往往是船舶调整航向,纠正偏航;大幅度转向则是船舶在避让或在航路点转向至新航向。从船舶安全的角度考虑,更加关注“大幅度左转”和“大幅度右转”。对海上交通中多艘船舶进行单船操纵模式辨识,通过对所需的“操纵模式”进行轨迹点聚类,能进一步识别出交通模式中的转向区和停留区。通过将交通模式中的转向区与单船轨迹中“大幅度转向”点相比对,可识别出单船轨迹中的避让点。 [1] FANG Z,SHAW S L,TU W,et al.Spatiotemporal Analysis of Critical Transportation Links Based on Time Geographic Concepts: A Case Study of Critical Bridges in Wuhan,China[J].Journal of Transport Geography,2012,23(3): 44-59. [2] 陶立. 机动车驾驶员不当驾驶行为特征与判别指标分析 [D].北京: 清华大学, 2012. [3] 辛飞飞,韦龙雨.交通诱导信息对驾驶员路径选择行为影响调查分析[J]. 交通信息与安全,2013,31(3): 64-68. [4] 王祖超,袁晓如. 轨迹数据可视分析研究[J]. 计算机辅助设计与图形学学报, 2015, 27(1): 9-25. [5] 吴兆麟,朱军.海上交通工程[M].大连:大连海事大学出版社, 2013:110-116. [6] 潘家财,邵哲平,姜青山.数据挖掘在海上交通特征分析中的应用研究[J].中国航海, 2010, 33(2): 60-62. [7] VESPE M, VISENTINI I, BRYAN K, et al. Unsupervised Learning of Maritime Traffic Patterns for Anomaly Detection[C]∥Data Fusion & Target Tracking Conference: Algorithms & Applications, 9th IET. IET, 2012: 1-5. [8] IALA. Recommendation A-124 Appendix 19 : Satellite AIS Considerations[C]∥International Association of Marine Aids to Navigation and Lighthouse Authorities, Tech. Rep., 2011. [9] 朱飞祥,张英俊,高宗江. 基于数据挖掘的船舶行为研究[J]. 中国航海, 2012, 35(2): 50-54. [10] AARSAETHER K G,MOAN T. Estimating Navigation Patterns from AIS [J].Journal of Navigation, 2009, 62(4):587-607. [11] AARSAETHER K G,MOAN T. Combined Maneuvering Analysis, AIS and Full-Mission Simulation[J].International Navigational Symposium on Marine Navigation & Safety of Sea Transportation. Gdynia Poland Main Papers, 2007,23(2):93-100. [12] TOMINSKI C,SCHUMANN H,ANDRIENKO G,et al.Stacking-Based Visualization of Trajectory Attribute Data[J].Transactions on Visualization and Computer Graphics,2012,18(12) : 2565- 2574. [13] ANDRIENKO G, ANDRIENKO N, BAK P, et al. Visual Analytics of Movement [M]. New York: Springer, 2013:83-86. [14] GRAVESON A. AIS-An Inexact Science [J]. Journal of Navigation, 2004,57(3):339-343. [15] NORRIS A. AIS Implementation-Success or Failure [J]. Journal of Navigation, 2007,60(1):1-10.1.4 门限阈值的确定
2 AIS轨迹数据中单船操纵行为辨识
2.1 数据查询
2.2 单船轨迹数据清洗
2.3 单船轨迹数据插值和采样
2.4 单船操纵模式辨识参数的获取
2.5 单船轨迹操纵行为模式辨识
3 试验及分析



4 结束语
