小型复合分子泵用无刷直流电动机的控制器研制
2017-04-01雷艳华何朝晖刘广民
雷艳华,何朝晖,吉 方,刘广民
(中国工程物理研究院 机械制造工艺研究所,绵阳 621900)
小型复合分子泵用无刷直流电动机的控制器研制
雷艳华,何朝晖,吉 方,刘广民
(中国工程物理研究院 机械制造工艺研究所,绵阳 621900)
研制了一种小型复合分子泵的高速无刷直流电动机,该电机控制采用了无位置传感器方法。通过对分子泵负载曲线分析,设计了特定的硬件结构,开发了针对性地控制算法,完成了对无刷直流电动机的速度控制,实现了小型复合分子泵的驱动,控制性能通过了可靠性测试得到验证,进行了典型的分子泵性能试验,预期的功能指标得以实现。
分子泵; 高速无刷直流电动机;无位置传感器;控制算法;速度控制
0 引 言
研发的多口径的小型复合分子泵,分子泵结构设计三维结构如图1所示。而作为分子泵核心单元部件,高速无刷直流电动机(BLDCM)实现了自主研制,相应的控制技术也进行了详细研究,完成了项目要求的高转速控制,且在项目实施进程中,成为了不可缺的关键要素。
如图1所示,从电气控制角度出发,分子泵结构主要由机械运动组件、电机、控制器等几大部分组成。其中,旋转组件由动叶轮、牵引筒、永磁轴承、陶瓷球轴承以及转子心轴组成,在电机带动下进行高速旋转,与静叶片等组件共同作用下完成抽气功能。
电机组件在控制器的驱动下实现72 000 r/min的高速运转,作为分子泵的动力源提供旋转驱动。
而控制器则是输出控制电压,在电机的定子线圈中建立旋转磁场,驱动永磁转子作高速旋转,完成速度控制,并且要将温度、转速等状态信息发送至上位用户。
本文对项目的电机控制作详细介绍,并就相关实验验证结果进行了简要分析,给出初步研究结论,并进行了功能检验。
1 控制器总体设计
控制器总体架构如图2所示,主要分为硬件和软件两大部分,硬件主要由MCU、驱动电路、位置检测电路以及电流、温度检测电路等部分组成。

图2 控制器架构示意图
软件存储在MCU的存储内,上电启动,用户通过使能开关决定是否进行电机的速度控制。
控制器定时向上位机发送当前的控制状态,并更新用户的在线速度指令进行给定速度调整。
控制器与电机之间通过三相动力电缆和温度传感器信号线缆连接。
无位置反馈传感器模式是本控制器的核心控制方式,该模式硬件接线简单提高了可靠性,并且避免了由于位置传感器安装误差可能带来的转矩换相波动。
无位置传感器与有位置传感器的技术不同点就在于转子的相位检测。有位置传感器通过安装在定子上的传感器元件检测转子的N,S磁极的相对位置来获取准确的换相信号,那么无位置传感器技术也必须获取准确的换相信号,研究至今,较为成熟并且应用广泛的就是反电势过零检测方式。该技术通过对绕组端电压的测量,利用过零比较电路或数字处理算法获得绕组反电势过零点,此即是“端电压法”。由于处理过程中的滤波环节,端电压过零检测会导致相位延迟,而且此相位的延迟时间差与电机转速成比例增加,所以无位置传感器模式控制下的滤波延迟时间实时补偿是获取最佳换向点的关键技术。通过不同PWM斩波方式分析,获取了模拟中性点电压的曲线变化,并且结合“端电压法”的技术讨论,最终为了能够使电机运行于最佳换相角状态,而采用了“基于模拟中性点电压的相位实时补偿”的技术,实现了电机运行时绕组的准确换相。
2 硬件设计
无刷直流电动机的无位置传感器控制器的硬件结构主要由主控、逆变电路、过电流保护和模拟中性点电压检测等组成。此控制器采用了无位置反馈传感器的控制方式,实现了速度闭环控制,具备过流过压等保护功能。该控制器的电路框图如图3所示。
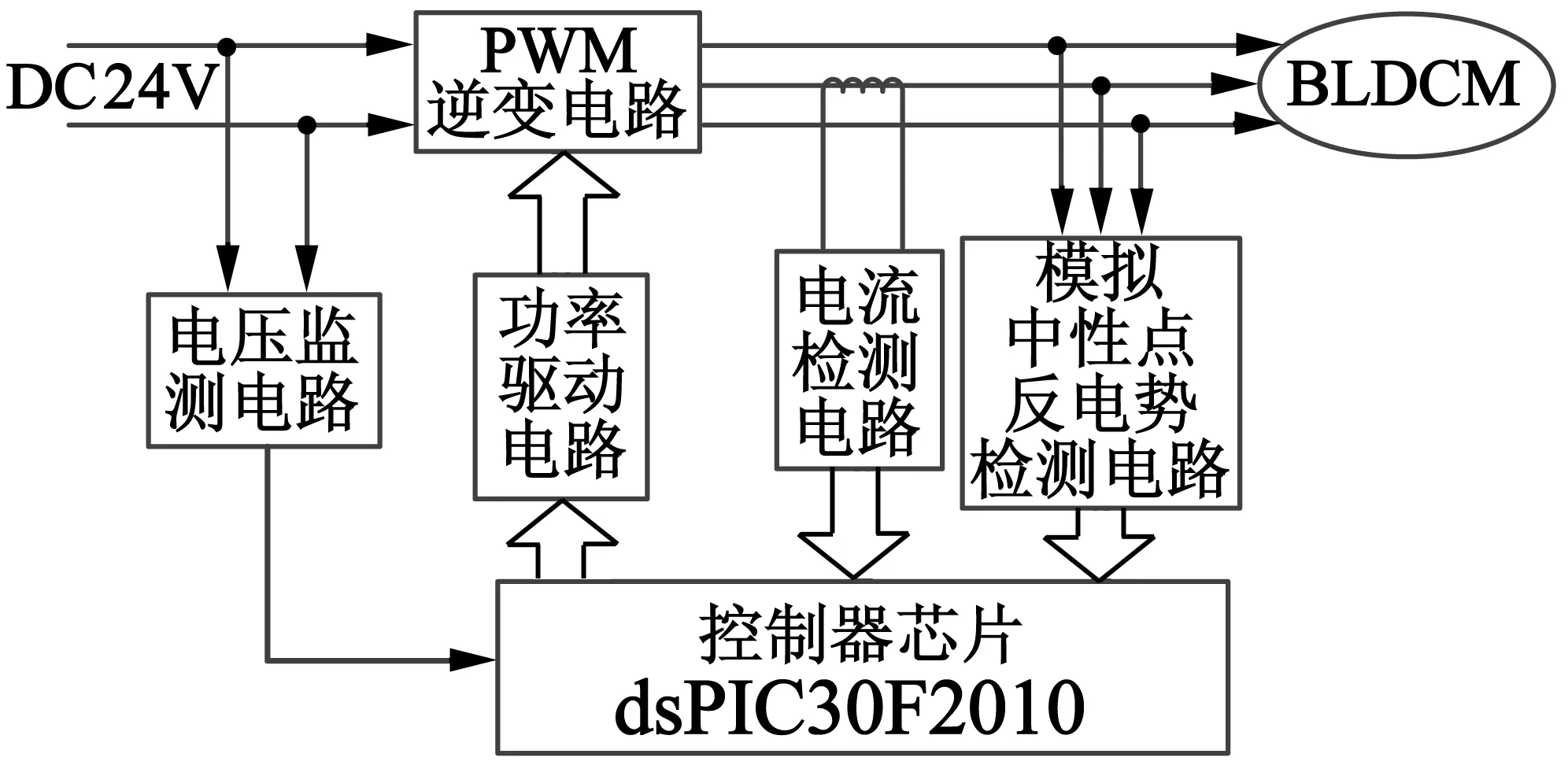
图3 控制器硬件结构框图
图4为本控制器的主控电路。在通电起动时,首先采用合适且通用(适应不同负载)的起动策略使电机旋转运动至外同步转速,然后切换到检测电压过零相位驱动下的运行状态,即无位置传感器模式。在无位置传感器模式下,三相绕组的端电压陆续经过滤波电路和过零比较电路,最后经过隔离器件送入DSP内核处理器dsPIC30F2010的数字输入端口。输入端口信号经过控制程序以及相应算法处理,获取触发相位信号产出PWM控制脉冲,并且经由IR2103S驱动电路最终控制MOS功率管的运行,完成电机线圈电流输出,产生旋转磁场来控制电机转子运行。控制器上的电机转速的调整,由内部参数来实现,也可以由上位机给出信号,改变参数实现速度设定的调整。在dsPIC30F2010上,读取转速给定值,并根据这个转速给定值调整线圈电压,从而实现了电机转速的调整。通过对电机的线圈电流及电压的AD信号实时监视,当电压、电流超出设定阈值时,触发控制器的保护电路,停止DSP内核MCU的PWM控制脉冲信号输出。

图4 控制器主控电路
分析可知,三次谐波、同频同相三角波以及其他高频波形叠加组成了模拟中性点电压波形,其中PWM控制和绕组换向续流激发了高频成分。而恰恰是PWM调制信号的这种控制模式导致了模拟中性点电压波形发生了畸变,进而在检测模拟中性点电压时,受到了影响,干扰了相位延迟补偿的过程。
模拟中性点电压的简化表达式:
可以看出,在式(1)中,PWM调制信号作为系数项影响了模拟中性点的电压检测,因此,在模拟中性点的电压检测过程中,需要增加技术手段去除公式里的PWM影响项。显然该技术手段就是滤波技术,通过滤除PWM干扰,获取准确的模拟中性点电压信号,否则PWM调制信号会导致不正确的模拟中性点电压检测。但是增加滤波环节后,模拟中性点电压的过零将发生相位延迟,因此需要进行实时的相位角度补偿获取准确的电压过零点。硬件信号检测电路如图5所示。
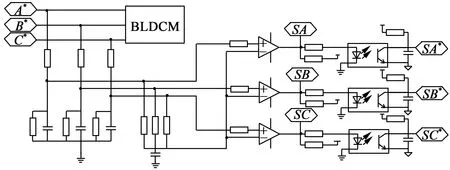
图5 基于模拟中性点的反电势过零检测电路
3 控制软件设计
小型复合分子泵控制器软件的主要功能采用轮询式设计,其中硬件参数初始化、控制参数初始化以及控制主功能在主循环体内进行。而作为实时性要求较高的换相、电流控制由定时器和外部中断完成。总体结构如图6所示。
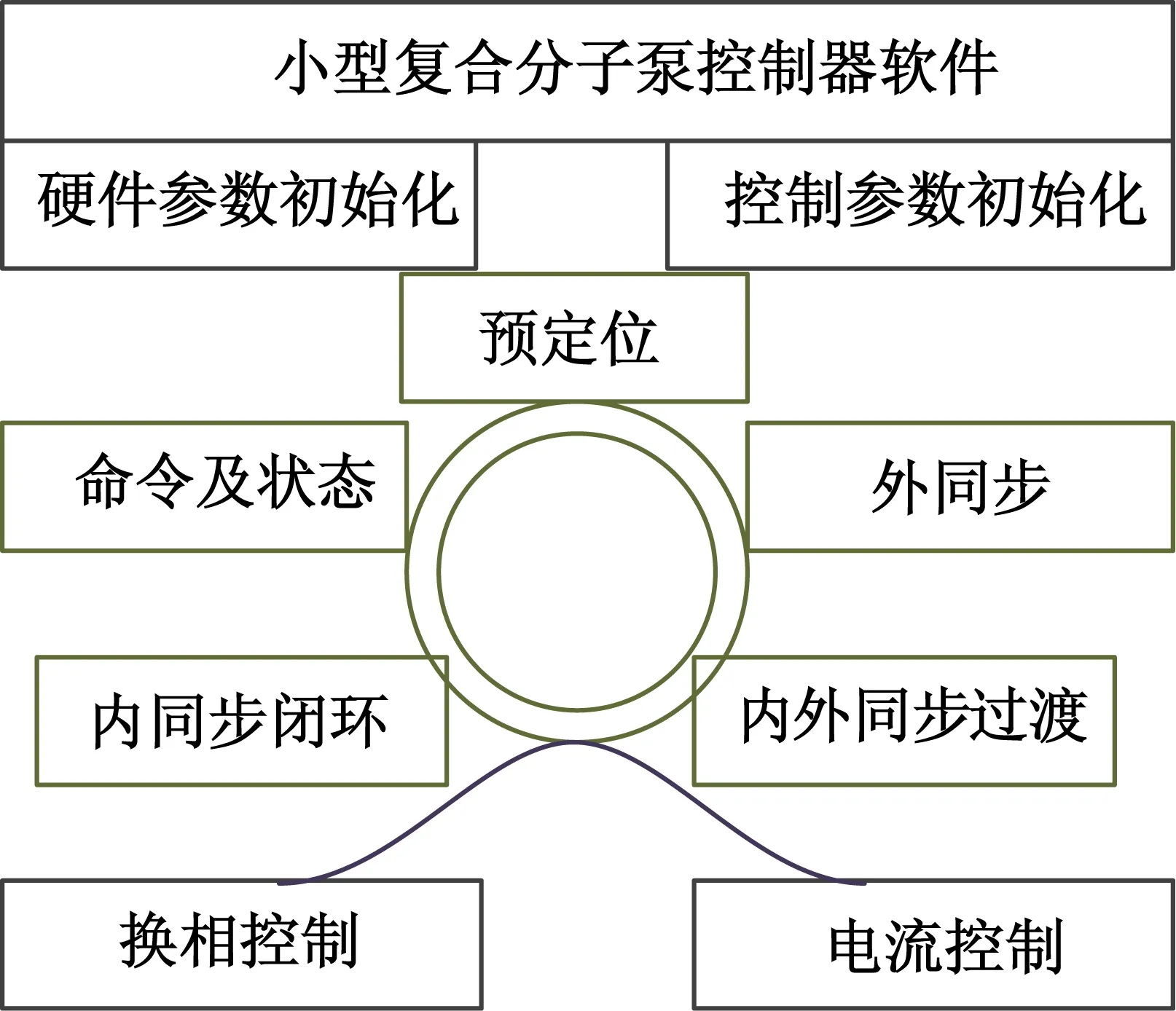
图6 软件总体结构图
上电开始,软件加载,预置控制参数和硬件参数,确定与运行环境相关的参数,并且开放中断。当完成参数预置后,程序进入循环体,开始扫描命令交互及状态检测过程。其中,当检测到开机信号后,开始进入控制循环体;在此控制循环体内,对控制步骤进行控制,内部进行逻辑步骤,确定何时开始执行预定位、外同步及内同步控制过程。作为换相控制和电流控制,由中断过程完成,该中断类型包含外部中断和定时器中断两种。总体流程图如图7所示。
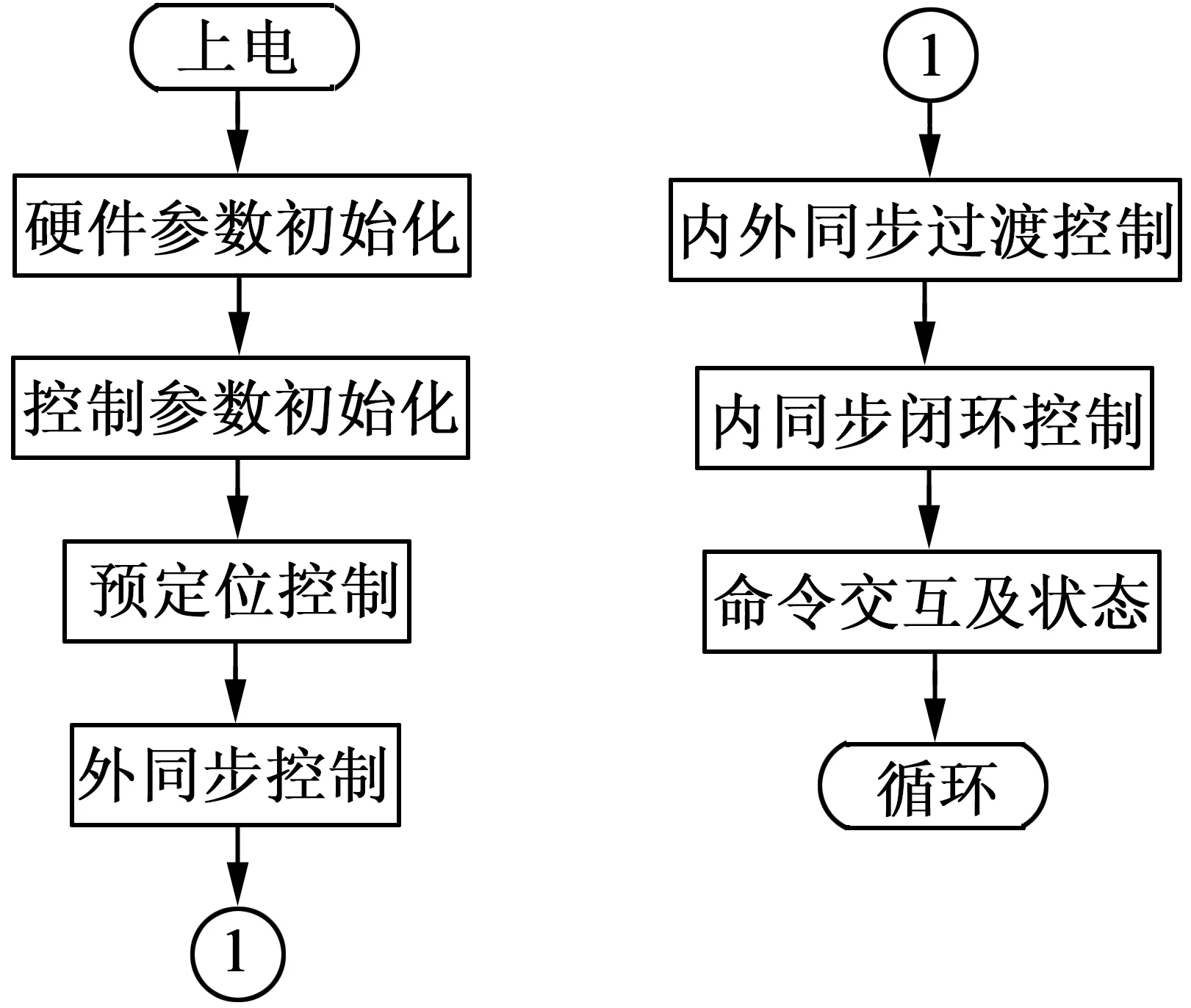
图7 控制总体流程图
内同步闭环控制是电机在运行状态下的主要软件循环体。因此该闭环控制对控制性能起着决定性的作用。
控制器的电机起动过程采用改进型的3段式,即预定位、外同步升压升频、内同步。
外同步的控制是在预定位完成后进行的。如果预定位错了,外同步起动通常也会失败。
外同步功能是一种开环的工作模式,软件按照电机换相循环规律,对功率开关管进行通断控制。而其,通断的开关频率是与电机旋转速度相关,速度的6倍就是软件外同步环的循环频率。当正确的开关信号形成后,电机的定子就完成了旋转磁场的建立。在定子旋转磁场的驱动下,转子开始进行旋转。软件此时的工作是要关注转子旋转与定子旋转磁场的同步。当两者的相位差控制在30°以内时,外同步的工作就是成功的。当转子旋转速度达到预设的内外同步切换阈值时,软件外同步完成,将相应标志位给定,开始切换。
当外同步切换到内同步后,速度控制就进入了闭环控制方式。软件在此阶段要完成速度的PID闭环控制,该循环周期要在调试过程中进行调节确定。
内同步闭环控制是电机在运行状态下的主要软件循环体。因此该闭环控制对控制性能起着决定性的作用。
当外同步切换到内同步后,速度控制就进入了闭环控制方式。软件在此阶段要完成速度的PID闭环控制,该循环周期要在调试过程中进行调节确定。
while(Motor is On)
{
speederror_now_cal=speederror_now;
dutycycle1=((speederror_now_cal*kp)>>6)
Integral=speederror_now+Integral
Integral_cal=Integral;
if(Integral_cal>=70000) Integral_cal=70000;
if(Integral_cal<=-300000) Integral_cal=-300000;
dutycycle2=((Integral_cal*ki)>>13);
PIDOutPut=dutycycle1+dutycycle2;
}
4 运行试验
控制器经过了几次改进后,实物图如图8所示,获得稳定的运行效果。并且与分子泵集成后进行了可靠性试验,得到了合格的可靠性指标。
图8 控制器实物图
图9为控制器输出频率曲线,从图9中可看出输出频率达到了设计要求,实现了1 200 Hz的指标要求,电机的转速稳定达到了指标72 000 r/min。

图9 控制器输出频率曲线
试验过程中监测了电机速度稳定性,如图10所示。在给定速度值72 000 r/min时的速度波动小于1 Hz,即60 r/min。
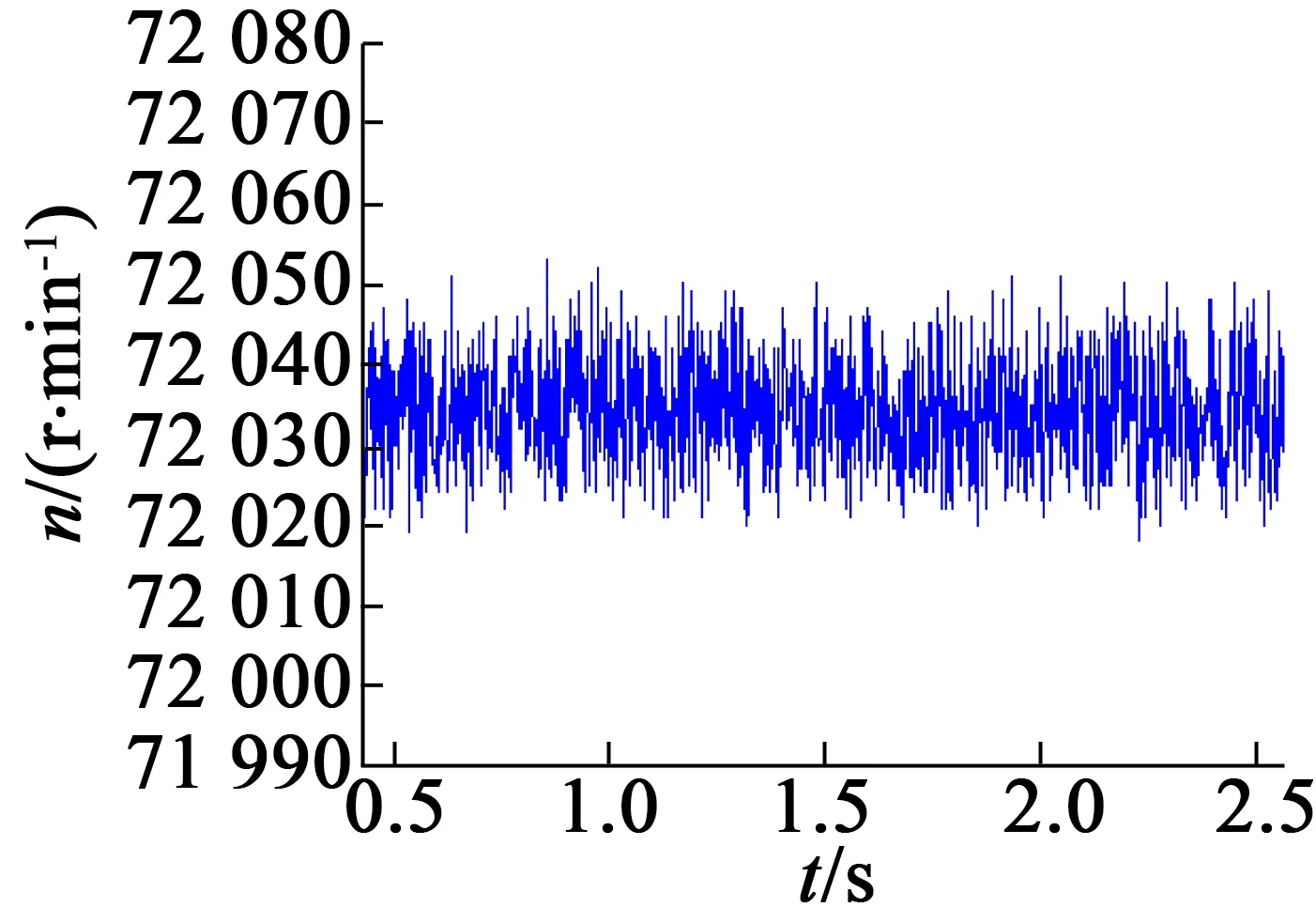
图10 电机速度波动曲线
从电机速度曲线分析,该电机运行的速度平稳性满足了最初分子泵的应用需求±1 Hz波动要求。
5 结 语
本项目研制的面向小型复合分子泵的高速永磁电机控制器,实现了重仪项目的功能要求,甚至性能指标初步测试也已经达到优于最初的设计指标。通过本项目的高速电机控制器的研发,为熟练掌握高速永磁电机控制器的设计以及加工技术提供了宝贵的技术积累。
[1] 纪历.高速永磁同步电机无传感器控制[J].电机与控制学报,2011,15(9):24-30.
[2] 王凤翔.高速电机的设计特点及相关技术研究[J].沈阳工业大学学报,2006,28(3):258-264.
[3] OURRION J P,GU J.一种新型永磁同步电机用无位置传感器控制算法[J].电力电子,2006(4):19-23.
Research and Manufacturing of Controller for Mini Composite Molecular Pump Brushless DC Motor
LEIYan-hua,HEZhao-hui,JIFang,LIUGuang-min
(Institute of Mechanical Manufacturing Technology,China Academy of Engineering Physics, Mianyang 621900, China)
A high speed brushless DC motor that just for the mini composite molecular pump was developed, while the DC motor was under control with the position-sensorless method. The corresponding hardware and software were developed just for the load characteristic of molecular pump. Then the speed control loop was constructed, and driving the Mini Composite Molecular Pump to work. Besides the control performance is validated by the reliability test, and the function targets have been satisfied.
molecule vacuum pump; high speed BLDCM; position-sensorless; control algorithm; speed control
2016-07-12
TM33
A
1004-7018(2017)02-0059-03
雷艳华(1977-),男,高级工程师,研究方向为机电一体化控制系统。
