电动汽车用宽调速范围轮毂电机的设计与仿真
2017-04-01盛智愚裴夏青周元钧
盛智愚,裴夏青,周元钧
(北京航空航天大学,北京 100191)
电动汽车用宽调速范围轮毂电机的设计与仿真
盛智愚,裴夏青,周元钧
(北京航空航天大学,北京 100191)
针对某新型电动汽车用轮毂电机性能要求一种宽范围的调速特性,比较分析异步电机、开关磁阻电机、永磁同步电机和一种使用U型电磁铁的模块化横向磁场电机的调速方法与机械特性,分别进行电机模型设计。采用有限元仿真软件Ansoft对4种电机模型的机械特性、电磁损耗、效率和电磁重量等特性进行仿真,比较分析仿真结果进而提出最优电机设计模型。研究表明,相对于传统电机,基于U型电磁铁的模块化横向磁场电机的机械特性与设计要求配合最好;电磁重量最轻、功率密度最高;在500~6 000 r/min转速范围内,可实现85%~90%的稳定效率;模块化结构使设计方案更为简单,理论上具有较好的容错特性,是一种适用于电动汽车的新型轮毂电机。
电动汽车;轮毂电机;横向磁场电机;电机设计;比较分析;电机仿真
0 引 言
新能源电动汽车是现阶段汽车发展的主要方向之一,电机作为电动汽车的核心部件,在电动汽车的研制中有着举足轻重的作用。电动汽车的电机安装空间狭小、电池容量有限,电机的体积与质量指标十分重要。目前电动汽车用电机的研究主要集中在永磁同步电机与开关磁阻电机及相应控制策略的研究与设计,而新型电机涉及不多。因此,对于电动汽车用宽调速轮毂电机的研究具有重要现实意义。文献[1]讨论轮毂电机的优点和要求,指出轮毂电机能够节约汽车的空间,从而使增加电池容量和多样化的电动汽车设计成为可能。文章同时指出轮毂电机应该具有高效率和低重量的特点,以满足电动汽车运行要求。文献[2]讨论高功率密度电机与一般传统电机在设计运行时的不同之处,提出部分高功率密度电机设计时需要考虑的问题,为高功率密度电机的设计提供了思路。为达到轮毂电机的要求,有学者尝试对永磁同步电机进行改进,文献[3-6]分别介绍不同改进型的永磁电机来提高功率密度。除了永磁同步电机,各种电动汽车用新型电机也接连提出。文献[7-8]分别设计了盘式无铁心永磁同步电机和一种混合励磁轴向磁场磁通切换电机,以期获得较高的功率密度。横向磁场电机作为一种新型电机,目前也受到很大关注。文献[9]对横向磁场电机和普通径向磁场电机进行对比分析,仿真分析表明横向磁场电机较适用于低速直接转矩输出的系统,如电动汽车的轮毂电机。文献[10]讨论模块化横向磁场电机的电机原理和输出转矩的成分和数学模型,提出该电机转矩是由磁阻转矩、绕组磁阻转矩和永磁磁阻转矩组成。文献[11]指出高性能电机系统发展方向为高功率密度、高可靠性、高适应性、高精度。目前,学者对各种新型电机的研究多集中于转矩、效率和设计方案,而对于电机的功率密度、重量、调速范围等特性的研究较少。
本文基于某新型电动汽车轮毂电机宽调速范围的设计要求,分别设计了异步电机、永磁同步电机、开关磁阻电机和模块化横向磁场电机模型,对4种电机的控制方法、机械特性、调速范围、重量和体积等特性进行对比分析。使用Ansoft软件对4种电机工作特性进行仿真,比较分析仿真结果,进而确立较优的电机设计模型。
1 目标电机性能需求参数
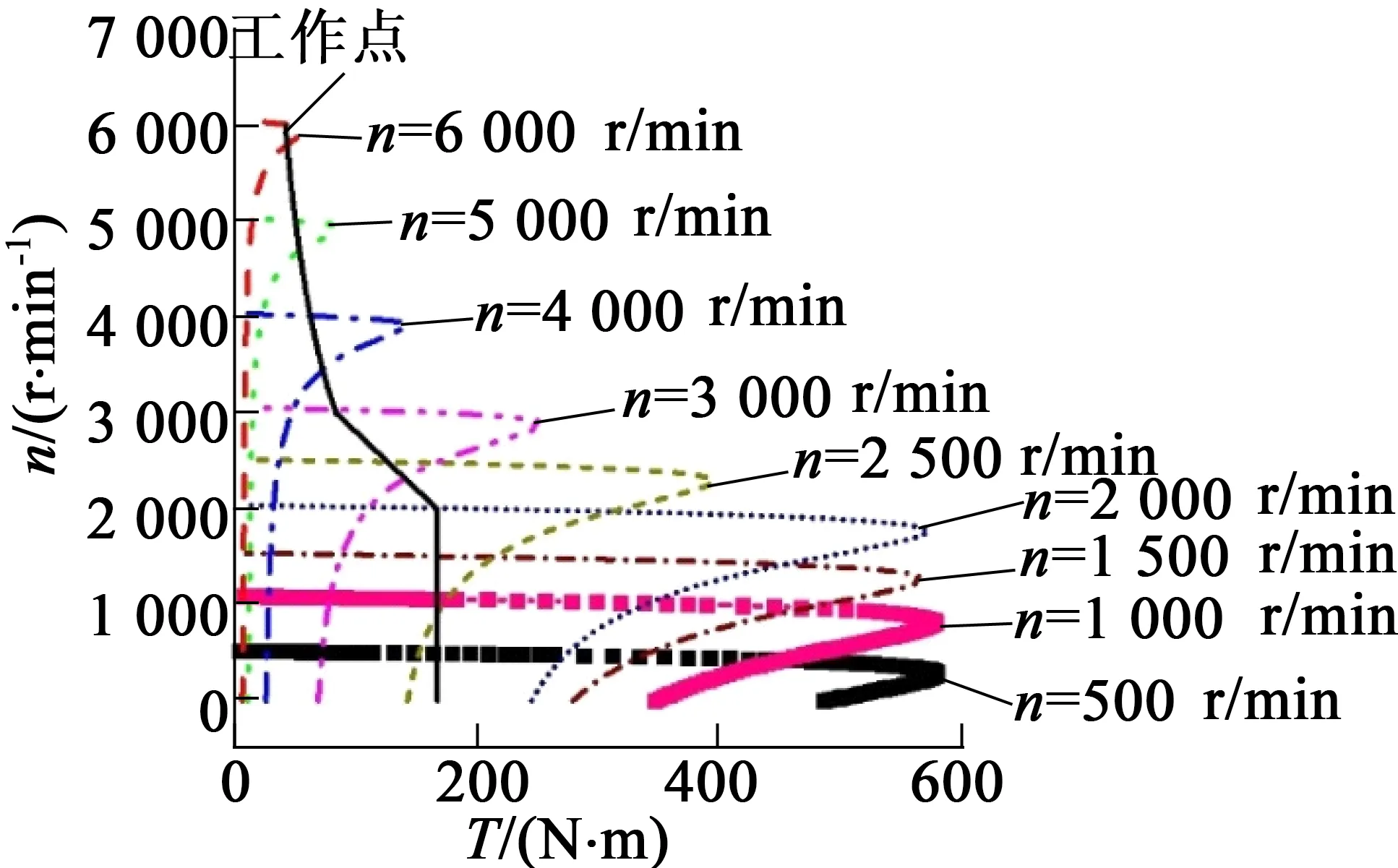
项目需求委托单位提出的某新型电动汽车电机的外特性需求参数如图1所示。设计要求电机在低速运行,即0~2 000 r/min时,能够维持输出转矩为167 N·m实现恒转矩运行;在高速运行时,即3000~6 000 r/min时,电机能够以26.2 kW恒功率运行。目标电机的部分指标如表1所示,其中电机额定转速为2 000 r/min,额定功率为35 kW,额定效率要求不低于87%。
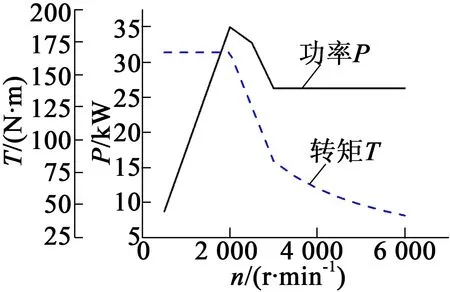
图1 电机外特性转速-功率曲线
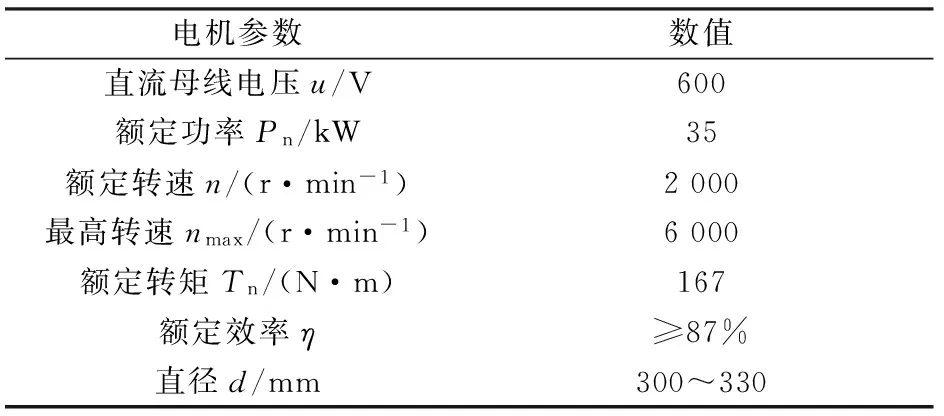
表1 目标电机性能指标
2 传统电机设计
文中传统电机设计模型主要指异步电机、开关磁阻电机、永磁同步电机。根据目标电机设计要求,分别设计异步电机、开关磁阻电机、永磁同步电机。
2.1 异步电机设计
异步电机的转子转速计算模型:

(1)
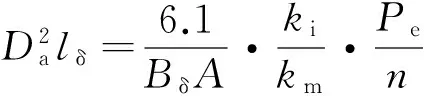
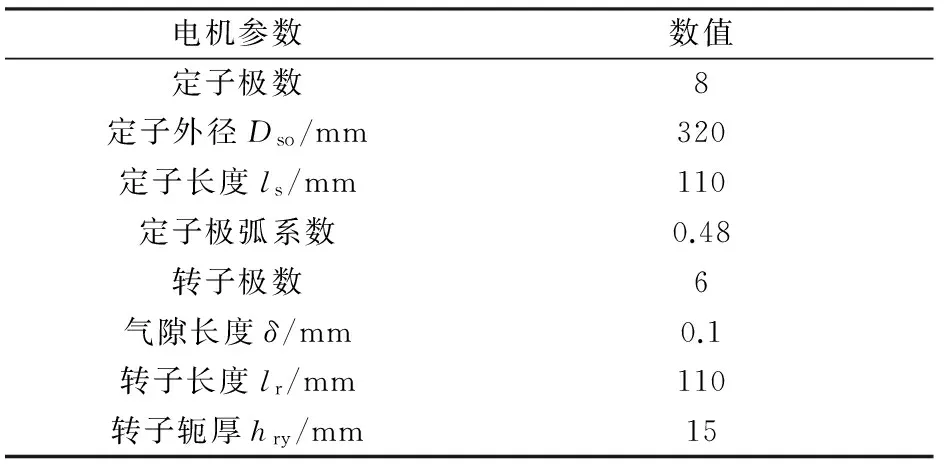
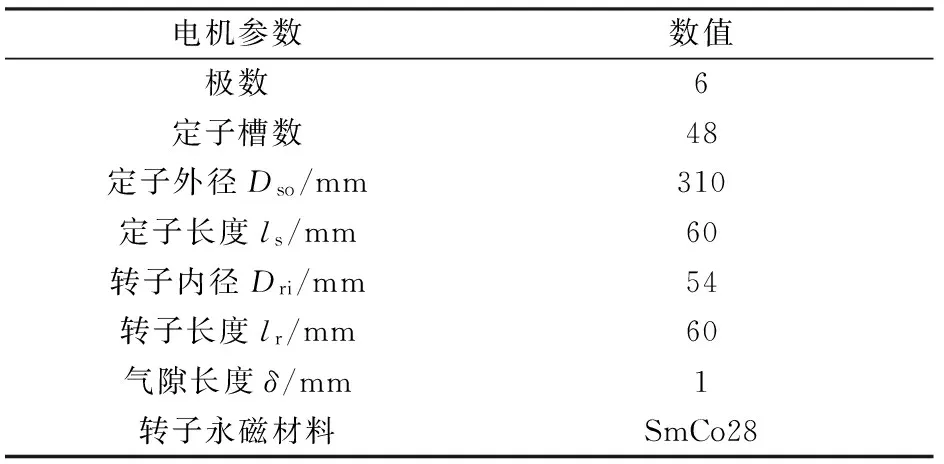
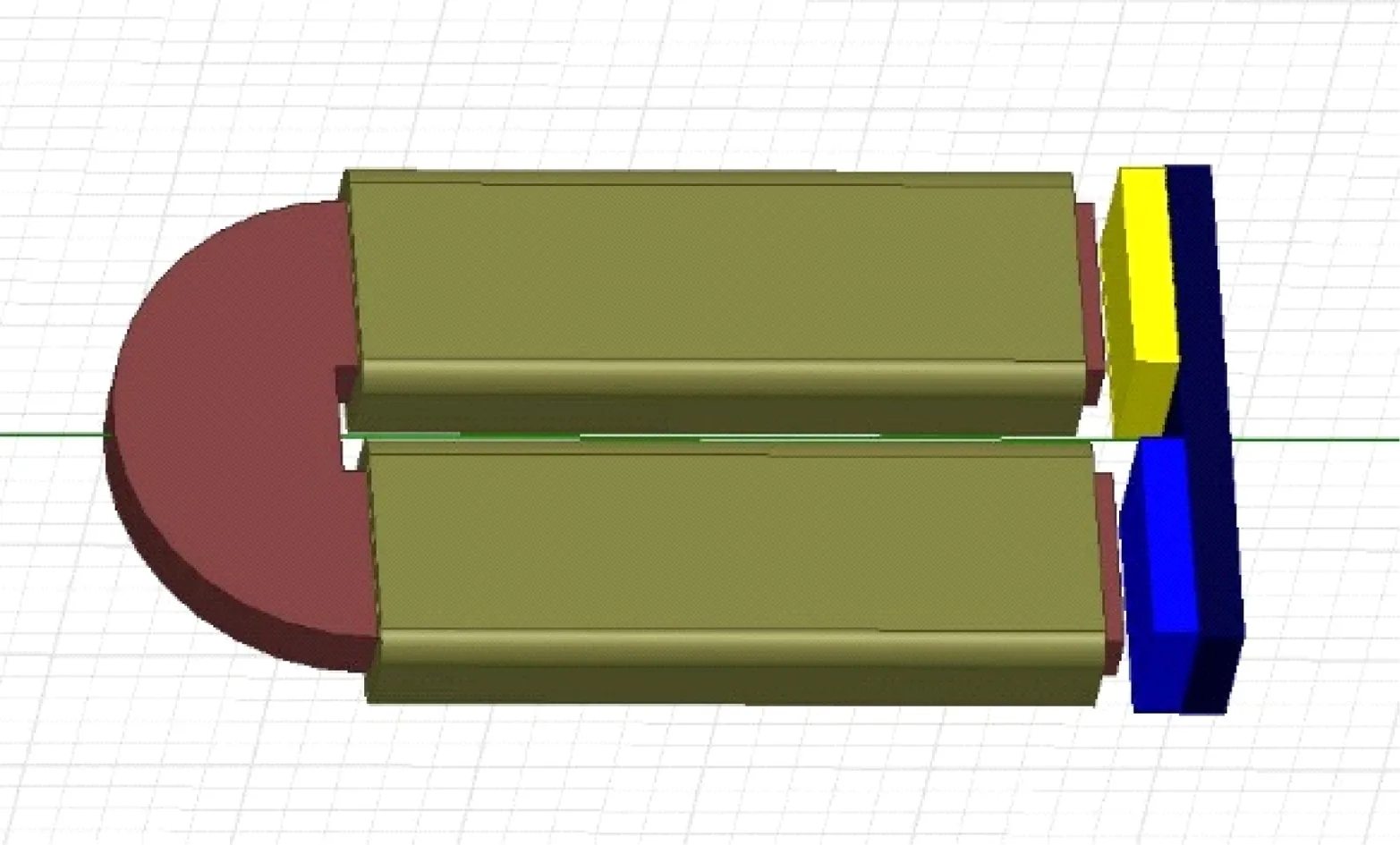
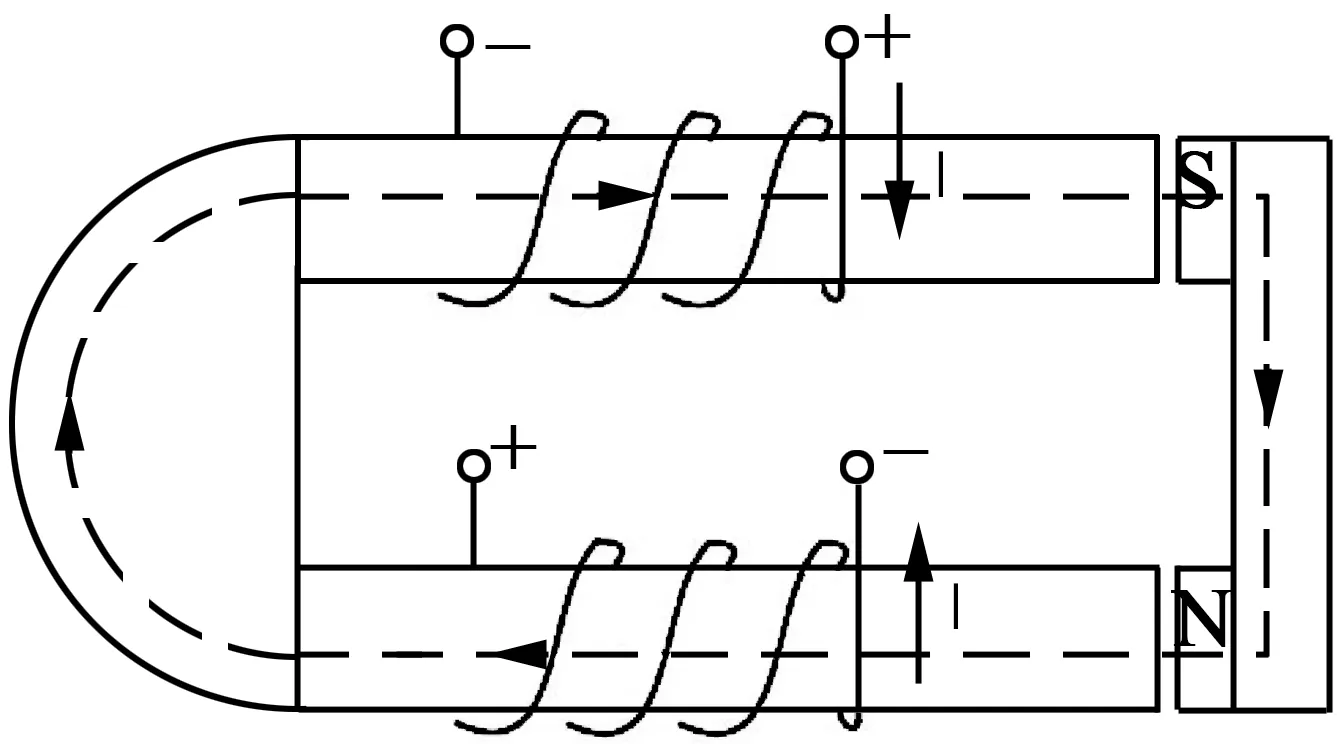
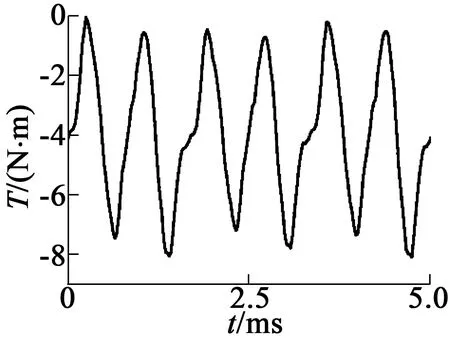
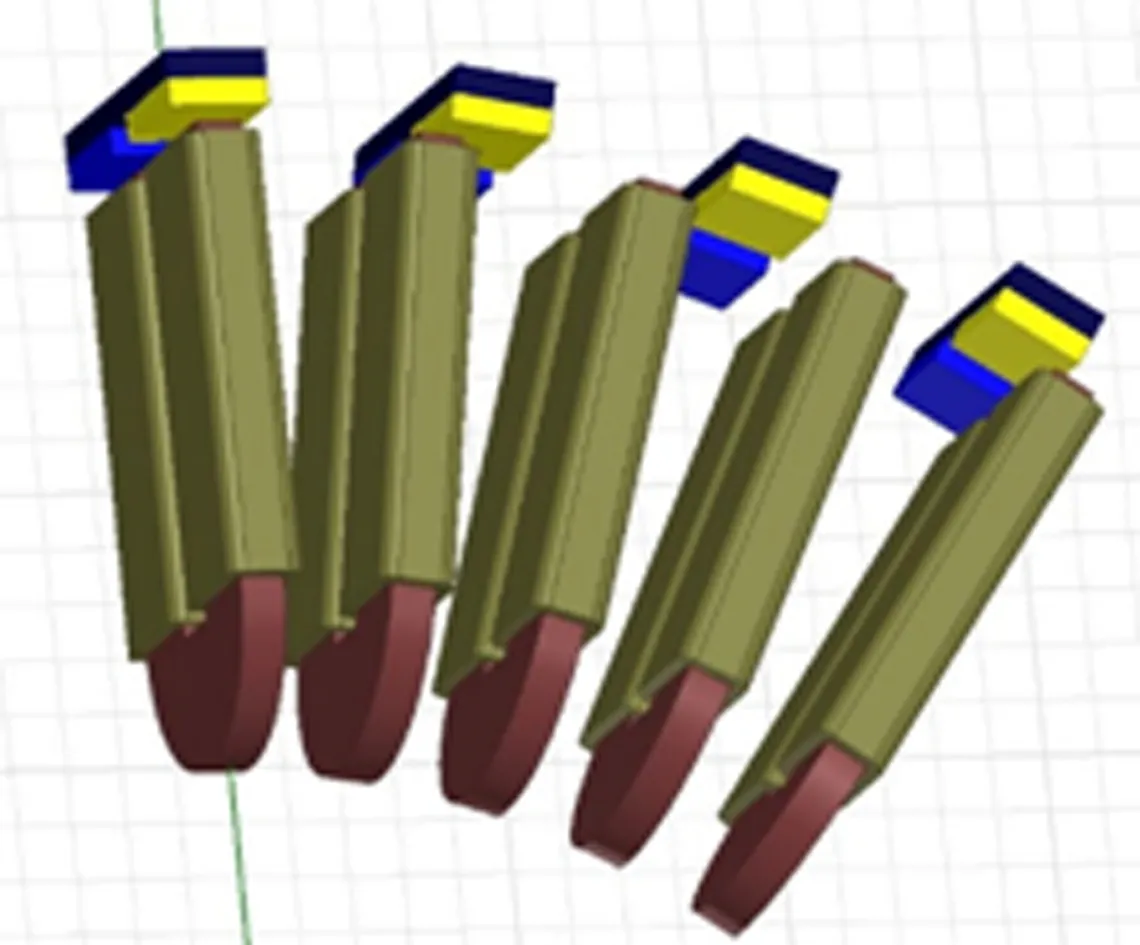
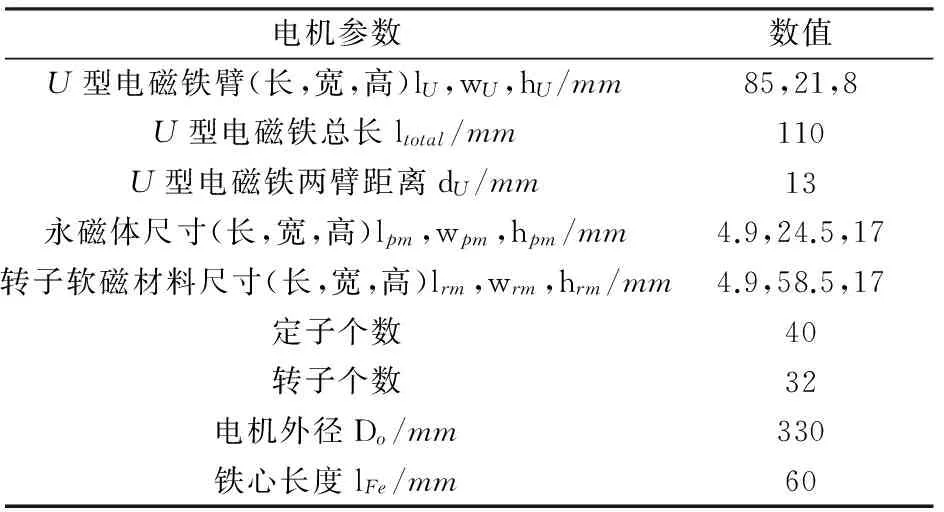
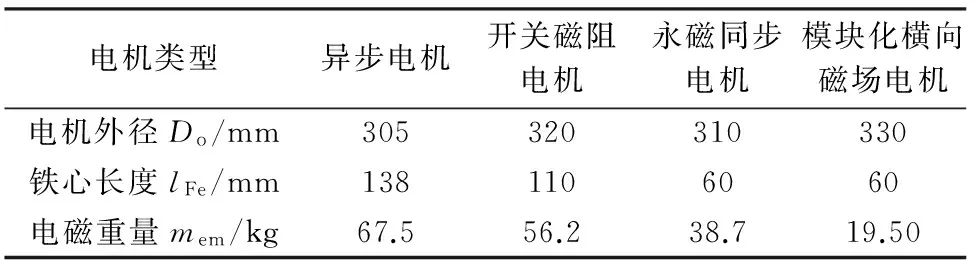
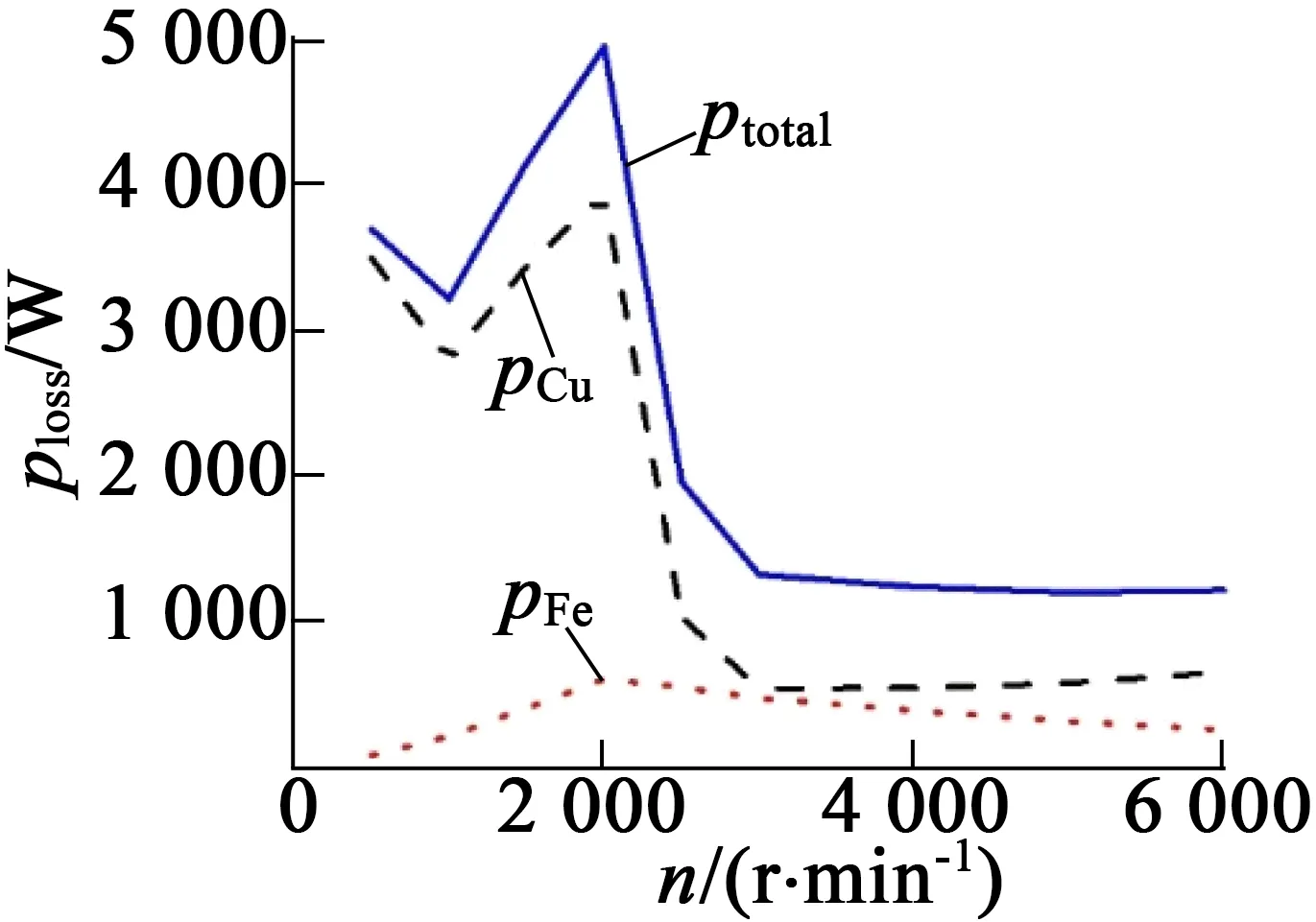
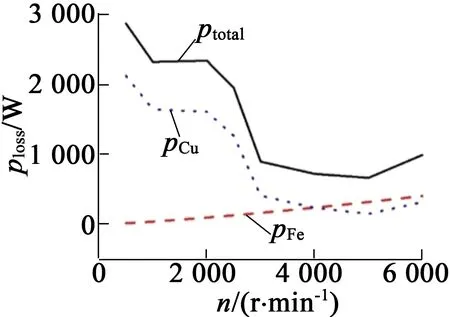
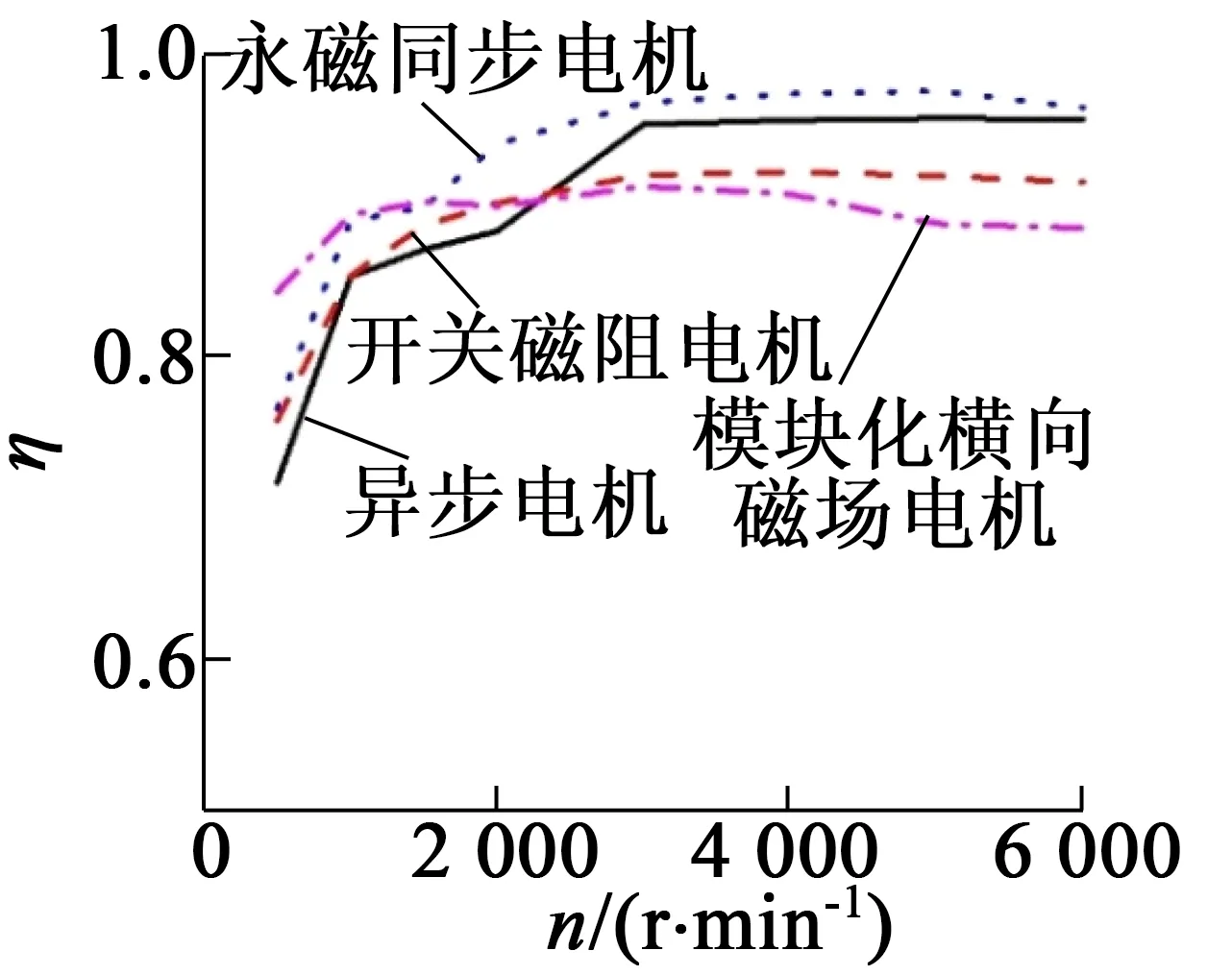
异步电机在工作点的转矩必须小于临界转矩,即Te 即临界转矩近似与转速的平方成反比。则根据式(3),电机设计中应尽可能减小漏感Lσ1和Lσ2,以满足高速时输出转矩的要求。 异步电机主要尺寸即定子内径Di和铁心有效长度lef的设计模型: (4) 在最大转速下电机需求的工作转矩为41.7N·m,经计算此时的临界转矩至少为60N·m。由式(4)可初步计算出异步电机尺寸参数值,最终设计的电机部分参数如表2所示。 表2 异步电机设计尺寸参数 2.2 开关磁阻电机设计 开关磁阻电机的自然机械特性表现出比较宽的调速范围,比较适用于图1所要求的调速特性。采用开关磁阻电机作为图1所要求的轮毂电机时,可以在低速时控制电压实现恒转矩调速,在高速时利用自然机械特性调速。文献[12]中提到的通过控制导通角与关断角来控制开关磁阻电机,其实际作用同样是控制电机的电压大小,所以不单独考虑。 由于开关磁阻电机的平均转矩表达式[12]: 式中:KL为电感变化系数,Us为电源电压。θp=θ1-θon,θq=2θoff-θ1-θon,λw=θ2-θ1,当电机导通角、关断角固定时这3个参数均为定值。故当电机在额定转速以上运行时,电机的平均转矩: (6) 即输出转矩近似与转速的平方成反比。 根据电机的自然机械特性,为了满足最高转速6 000r/min时的转矩41.7N·m要求,推算出额定转矩167N·m将出现在3 000r/min左右。因此,在电机的设计中,需要将3 000r/min作为额定转速,才能保证6 000r/min时的输出转矩达到要求。开关磁阻电机主要参数选择依据公式[13]: (7) 式中:Da为转子直径;lδ为电枢计算长度;Bδ为最大磁链;A为电负荷;ki为峰值电流系数;km为方波电流系数;Pe为额定功率;n为额定转速。 最终选择电机参数如表3所示。 表3 开关磁阻电机设计参数 2.3 永磁同步电机设计 由于永磁同步电机一般被认为是效率高、功率密度高、调速性能较好的电机,本文也将其作为轮毂电机的设计、比较方案之一。通常结构的永磁同步电动机,由于转子为永磁体,无法在额定转速以上实现大范围弱磁调速,理想的调速方式为恒转矩调速。 如果采用永磁同步电机作为图1所要求的轮毂电机,由于其很小的弱磁调速范围,很大范围的调速需要采用电压控制的恒转矩调速方式。永磁同步电机的控制可以在d-q坐标系进行,数学模型[12]: 在低速时控制d轴电流id=0,即可实现恒转矩调速,在高速时控制id<0,则可以实现弱磁调速。 数学学科教学往往让学生觉得枯燥无趣,定义、定理和例题都抽象难懂。在实践共同体中每周进行一次集体备课,在集体备课中,各位教师针对学生的基本情况总结了简捷的讲解方法,搜集了实用的材料,还准备了应用型例题,彼此间进行交流共享、取长补短、互相借鉴。这样很好的发挥了集体的作用,不仅让各位教师找到一种归属感,还提高了教师的教学应用能力。 本文设计的永磁同步电机在弱磁调速时,以铜损耗为额定值作为前提,经计算调速范围为1 000r/min左右。即该电机在5 000r/min以上可以采用弱磁调速,而在5 000r/min以下均要采用调压调频的调速方法。 电机的尺寸通过参考现有电机和以下两个基本关系式来确定[14]: (10) (11) 式中:P′为额定功率;α为计算极弧系数;A为电负荷;Bσ为气隙磁密基波幅值;n为额定转速;Tmax为最大转矩。 本文设计的永磁同步电机其额定转速定为5 000r/min,同时因为调压调频属于恒转矩调速方法,需要将额定转矩定为167N·m,导致该电机设计功率为表1中原额定功率的2.5倍,即为87.5kW,电机参数如表4所示。 表4 开关磁阻电机设计参数 模块化横向磁场电机为外转子电机且结构特殊,定转子的基本结构如图2所示。定子为U型电磁铁,两臂上缠绕着线圈。转子由两个极性相反的永磁体和一块软磁材料构成,其中软磁材料链接两个永磁体起导磁作用,相邻两个转子上的永磁体对应极性相反。 图2 定转子基本结构 当电机旋转时通过控制U型电磁铁中线圈电流的方向,使U型电磁铁两臂的极性与靠近的转子上的永磁体极性相反,从而使定子对靠近的转子产生拉力,对远离的转子产生推力。当转子旋转到与定子相对的位置时,改变定子上线圈的电流方向,使电机产生持续正向的转矩,磁路如图3所示。 图3 定转子磁路 一相电磁铁输出转矩波形如图4所示,可以看到输出转矩近似为正弦波含有较大的转矩脉动。而文献[15]中讨论了多相模块化横向磁场电机矩角特性的叠加效果,计算结果表明电磁单元组数越多,转矩中被抵消的谐波次数越多,剩余谐波的次数越高,转矩的脉动越少。但是过多的电磁单元将会使得电机控制逻辑复杂、控制系统搭建困难。因此本文设计的电机基本单元为五相四极,如图5所示,由5个电磁铁和4个永磁组件组成。 图4 一相电磁铁输出转矩波形 图5 电机基本单元 式中:L1为线圈电感i1为线圈电流;ωr为电机角速度;ψm为电磁铁线圈绕组匝链的永磁体磁链。 由于电压平衡式中磁阻项含有电机的角速度ωr,高速时引起很大的压降而使自然机械特性变软。定子与转子的参数如表格5所示,值得指出的是该电机定子之间填充的为复合材料环氧树脂。 表5 定转子参数 采用Ansoft仿真软件,对所设计的4种电机模型的机械特性、电磁损耗、效率和重量等特性进行仿真,应用于图1所要求的轮毂电机时的部分特性进行比较,分析仿真结果。 4.1 电机机械特性仿真比较分析 使用上述4种电机的设计参数值,仿真各电机的机械特性,结果如图6与图7所示。 图6 异步电机机械特性仿真 图7 开关磁阻电机、永磁同步电机与模块化横向磁场电机机械特性仿真对比 为满足高速时输出转矩的要求,异步电机在额定转速以下需要具有较大的临界转矩如图6所示。一般结构的永磁同步电机由于弱磁能力较弱,设计功率有较大的提高,额定转速以上功率浪费严重。开关磁阻电机的输出转矩在额定转速以上,与转速的平方成反比,高速时转矩下降较快。综合比较,模块化横向磁场电机的机械特性与设计需求配合最好。 4.2 电机尺寸与重量的仿真比较分析 本文4种电机设计,均按照表1中外径为300~330mm的要求进行,表2~表4给出了4种电机设计的主要尺寸,使用仿真软件Ansoft计算得到电机电磁重量数据,如表6所示。表中的电磁重量指电机的定、转子铁心与绕组重量,对应于仿真软件中的TotalNetWeight数据。 表6 不同电机设计尺寸与重量参数 表6数据表明,在满足相同性能要求下4种电机设计外形上存在较大差异。异步电机的重量最大,体积也较大,仅小于开关磁阻电机。开关磁阻电机的重量小于异步电机,大于其他两种电机,但体积最大。永磁同步电机由于弱磁能力较弱,造成设计功率较大,因使用永磁体使得其功率密度较高,设计出的电机体积最小,重量较轻。模块化横向磁场电机重量相当于异步电机的1/5、开关磁阻电机的1/3和永磁同步电机的1/2;体积是异步电机的0.5倍、开关磁阻电机的0.58倍、永磁同步电机的1.13倍。因此,模块化横向磁场电机的一个突出优点就是具有相对较高的功率密度和较小的重量,故这种电机十分适用于对电机体积与重量都有较高要求的电动汽车。 4.3 电机电磁损耗仿真比较分析 对4种电机在不同转速时的电磁损耗进行仿真分析比较,结果如图8~图11所示。图11中,模块化横向磁场电机在低于额定转速时以铜损耗为主,高于额定转速时铁损耗较大,电磁损耗随转速的变化趋势与开关磁阻电机相似。 图8 异步电机转速-损耗仿真 图10 永磁同步电机设计损耗仿真 图11 模块化横向磁场电机设计损耗仿真 4.4 电机效率仿真比较分析 仿真分析电机在不同转速时的损耗和效率,得到4种电机设计的电磁效率比较曲线,如图12所示。 仿真结果表明,模块化横向磁场电机在低速时(<2 000r/min)损耗较小,效率高于传统电机。在高速时由于铁损耗较大,导致电机总损耗较大,整体效率低于传统电机。在额定转速点处,永磁同步电机的效率最高约为95%,模块化横向磁场电机与开关磁阻电机相似约为90%。相较于传统电机设计,模块化横向磁场电机在较宽范围内(1 000~6 000r/min)能够保持90%的稳定效率、且在低转速区(500~1 000r/min)能实现85%~90%的较高效率。 图12 4种电机设计电磁效率仿真 通常结构的异步电机、开关磁阻电机和永磁同步电机的设计,需要根据电机的设计指标完成完整的电磁计算和参数的优化。如果需要修改设计指标,则需要重新进行一次电磁计算和优化过程。 模块化横向磁场电机由U型电磁铁组成,只需要完成一个电磁铁的电磁设计和优化,然后根据设计指标完成积木式的组合设计即可。在设计功率、转速等指标需要修改时,也只需要重新进行一个积木式的组合设计。因而,模块化横向磁场电机设计方法较为简单实用。 模块化横向磁场电机另一个结构特点是各相之间没有磁耦合,每个电磁铁用一个独立的H桥电路控制。普通的机电作动系统,可靠性分析与数据表明,功率电子装置是可靠性薄弱环节[16]。对于普通异步电机与永磁同步电机,当电机一相电路出现故障后电机无法继续运行,由于模块化横向磁场电机的各相在磁路、电路上独立,原理上当电机某相电路发生故障时电机依靠其他相仍能够继续运行,仅输出转矩脉动增加。因此,在理论上模块化横向磁场电机拥有较好的容错性能。 本文针对一种宽范围调速特性要求,设计了异步电机、开关磁阻电机、永磁同步电机和一种新型模块化横向磁场电机。使用有限元仿真软件Ansoft对4种电机进行仿真对比分析,得出如下结论: 1)模块化横向磁场电机机械特性与设计要求配合最好。 2)4种电机中模块化横向磁场电机电磁重量最轻,功率密度最高。 3)横向磁场电机在高速时效率低于其他电机,但在较宽范围内能够保持约90%的稳定效率。 4)模块化横向磁场电机设计方法简单,在理论上具有较好的容错性。 因此模块化横向磁场电机十分适用于对电机的体积与重量都有较高要求的电动汽车。 [1] HEJRA M,MANSOURI A,TRABEISI H.Optimal design of a permanent magnet synchronous motor: Application of in-wheel motor[C]//2014 5th Internationa Renewable Energy Congress (IREC).IEEE,2014:1-5. [2] 王晓远,高鹏,赵玉双.电动汽车用高功率密度电机关键技术[J].电工技术学报,2015,30(6):53-59. [3] GU Lingling,FAN Ying,ZHANG Li,et al.Design and loss analysis of a new selfdecelerating PM In-wheel motor[C]//2014 17th International Conference on Electrical Machines and Systems,Hangzhou.IEEE,2014:3365-3370. [4] ESPANET C,DUBAS F,MAIH M,et al.In-wheel motor for a small hybrid electric vehicle:design,realization and experimental characterization[C]//2012 IEEE Energy Conversion Congress and Exposition.IEEE,2012:892-898. [5] 李蕴红,柴建云,牟树君,等.基于电枢反应补偿原理的新型永磁同步电机[J].电工技术学报,2014,29(3):27-32. [6] ARATA M,KURIHARA Y,MISU D,et al.EV and HEV motor development in TOSHIBA[C]//2014 International Power Electronics Conference.IEEE,2014:1874-1879. [7] 王晓远,陈静,王平欣.电动汽车盘式轮毂永磁电机设计[J].沈阳工业大学学报,2012,34(3):247-252. [8] 赵纪龙,林明耀,徐妲,等.混合励磁轴向磁场磁通切换电机弱磁控制[J].中国电机工程学报,2015,35(19):5059-5068. [9] CAVAGNINO A,LAZZARI M,PROFUMO F,et al.A comparison between the axial flux and the radial flux structures for PM synchronous motors[C]//Thirty-Sixth IAS Annual Meeting.Conference Record of the 2001 IEEE.IEEE,2001:1611-1618. [10] SUN Chu,BAI Longi,DU Xiaofei,et al.A novel wheel hub motor based on U-shaped electromagnet-working principle and torque characteristics [C]//Industrial Electronics and Applications.IEEE,2014:1398-1403. [11] 马伟明,王东,程思为,等.高性能电机系统的共性基础科学问题与技术发展前沿[J].电机与控制学报,2016,36(8):2025-2035. [12] 周元钧.交流调速控制系统[M].北京:机械工业出版社,2013. [13] 吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000. [14] 唐任远.现代永磁电机理论与设计[M]. 北京:机械工业出版社,1997. [15] 孙楚.新型轮毂电机的原理分析、设计与控制[D].北京:北京航空航天大学,2014. [16] 周元钧,董慧芳,王自强.飞行控制用无刷直流电动机容错运行方式[J].北京航空航天大学学报,2006,32(2):190-194. [17] 冯桂宏,李庆旭,张炳义,等.电动汽车用永磁电机弱磁调速能力[J].电机与控制学报,2014,18(8):55-66. The Design Scheme and Simulation of the Wide Speed Regulation Hub Motor Used in Electrical Vehicle SHENGZhi-yu,PEIXia-qing,ZHOUYuan-jun (Beihang University,Beijing 100191,China) A kind of wide speed regulation characteristic motor was required by a new kind of electrical vehicle. To fulfil the requirement, this paper analyzed and compared the method of speed regulation and mechanical properties of induction motor (IM), switched reluctance motor (SRM), permanent magnet synchronous motor (PMSM) and a new kind of modularization transverse flux motor (MTFM) that used U-shaped electromagnets as its stators. Then, the design of these four motors was performed. Using the FEM software Ansoft to complete the simulation of the mechanical properties, electromagnetic loss, efficiency and net weight of the four designed motors. And the best motor was choose based on the comparison of the simulation results. The results show that the MTFM suits the requirement best. It is the one which has the lightest weight and the highest power density in these motors. The efficiency of this motor could maintain 85~90% while the speed varied from 500 r/min to 6 000 r/min. And the modularization structure makes the design of this motor becomes very simple. Theoretically, it also has relative good fault tolerance ability. So, this MTFM is a new kind of motor which suits electrical vehicle well. electrical vehicle; hub motor; transverse flux motor; motor design; comparative analysis; motor simulation 2016-08-30 航空科学基金项目(2014ZC01002) TM359.9 A 1004-7018(2017)02-0013-05 盛智愚(1994-),男,硕士研究生,研究方向为电力电子与电力传动。

3 模块化横向磁场电机设计
4 电机特性仿真分析


5 结构与设计方法的比较分析
6 结 语
