基于模糊PID的直线音圈电动机减振系统设计
2017-04-01尹训锋潘松峰尹峰松
尹训锋,潘松峰,尹峰松,刘 朔
(青岛大学,青岛 266071)
基于模糊PID的直线音圈电动机减振系统设计
尹训锋,潘松峰,尹峰松,刘 朔
(青岛大学,青岛 266071)
直线音圈电动机(VCM)动子受到冲击时,会产生振荡,为了使系统尽快恢复稳定状态,减小动子冲击振荡,分析了直线音圈电动机的动子运行原理,通过数学分析,得到了它的数学模型。采用模糊控制方法,模糊推理过程可以在控制过程进行中改变3个控制参数的大小,然后再反馈校正给输入,并给出了实验结果。实验得出,模糊PID控制方法减小了反馈系统的稳态误差,提高了反馈精度和系统稳定性,实现了减振目的。
模糊PID控制;直线音圈电动机;减振
0 引 言
在现代工业高效率的要求下,音圈电动机应用场所趋向于频率越来越高,速度、加速度增大,而且需要精确定位,但是音圈电动机往往会受到各种大小不一的冲击,在这种状态下,音圈电动机会产生严重的振荡现象,从而导致定位精度下降,系统不稳定[5-7]。根据音圈电动机的工作原理,研究音圈电动机产生振荡、导致系统不稳定的原因在于当音圈电动机处于高频、高速、高加速状态时,外部冲击力大小不一定,时间不确定,直线音圈电动机必须以最小的波动,在最短的时间内回复原来位置,以保持系统的稳定[2]。
针对音圈电动机产生振荡、系统不稳定等问题,本文建立该系统电机数字模型,然后通过模糊控制的模糊推理过程,在控制系统运行过程中改变控制参数,反馈矫正,不断减小动子的振荡,提高系统抗振荡能力。
1 音圈电动机的数学模型
音圈电动机正常运行过程中,处于动态平衡时,会受到电磁力,阻力和弹力作用,他们的关系:
式中:a为音圈电动机内部绕组的加速度;m为绕组质量;F为电磁力;f为绕组所受摩擦力;K为弹性系数;x为绕组直线位移。
根据牛顿运动学定律,式(1) 可以写作:
式中:c为阻尼系数。式(2)经过拉式变换后,得到:
系统传递函数 :
2 模糊PID控制策略的实现
模糊控制可以使系统更加快速的响应,提高控制系统的动态性能,适用于位置偏差较大的情况;PID控制可以增强控制系统的静态性能,提升控制系统的精确度,适用于位置偏差较小的情况。因此将二者结合的控制方法比其中任何单独一个都能更好地提高控制系统的精确性和稳定性。图1为模糊PID控制器结构框图。
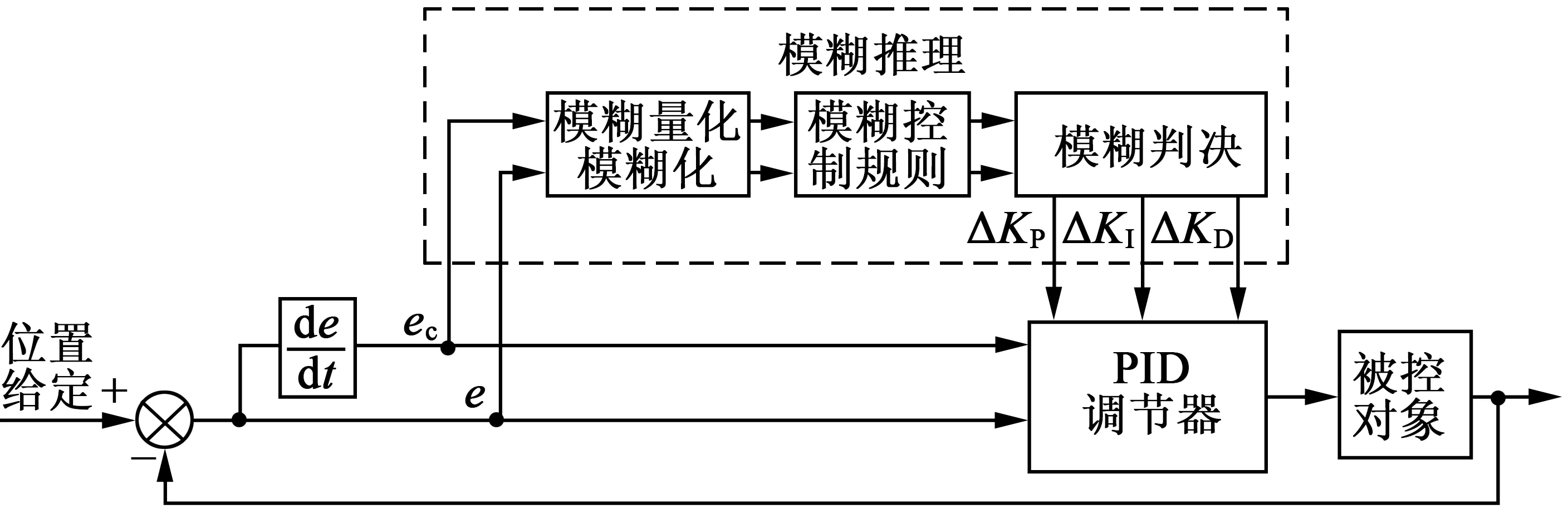
图1 模糊PID控制器结构框图
图1中,e为位置的偏差,ec为该偏差的微分值,ΔKP,ΔKI,ΔKD分别为PID控制的3个参数的修正值。通过模糊推理,可以得出e和ec与ΔKP,ΔKI,ΔKD的模糊关系,即可得出控制参数修正值的数值,进而得出3个控制参数数值,使音圈电动机保持位置稳定,实现减振目的。
对于ΔKP、ΔKI和ΔKD3个参数的修正值的隶属函数,为满足控制系统要求,设定为三角形隶属函数,ΔKP论域选取{-3,3},ΔKI论域选取{-0.3,0.3},ΔKD论域选取{-0.05,0.05}。对于偏差e和偏差微分ec,依据减振控制系统的要求,隶属度函数和论域分别设定为高斯型,{-3,3}。设定7个变量模糊子集为{NB,NM,NS,ZO,PS,PM,PB},该系统控制器的逻辑推理采用Mamdani法则,通过该法则,在偏差的量化区间上,得出偏差的隶属度,依据给出的模糊控制规则表,得到3个参数修正值分别对应的隶属度,然后进行模糊判决,判决过程采用中心法则,得到ΔKP,ΔKI和ΔKD的值,就得到了控制参数的最新值。表1,表2,表3为ΔKP,ΔKI和ΔKD的模糊规则表。

表1 ΔKP的模糊控制规则表

表2 ΔKI的模糊控制规则表

表3 ΔKD的模糊控制规则
3 减振系统的硬件设计
减振系统的主要功能是在线圈动子受到冲击时,自动进行反馈矫正,减小振荡,保持音圈电动机稳定运行。图2为减振系统的总体结构,它主要是由型号为TMS320F2812型DSP,RS-232接口电路,Elmo驱动器,磁栅尺等组成。
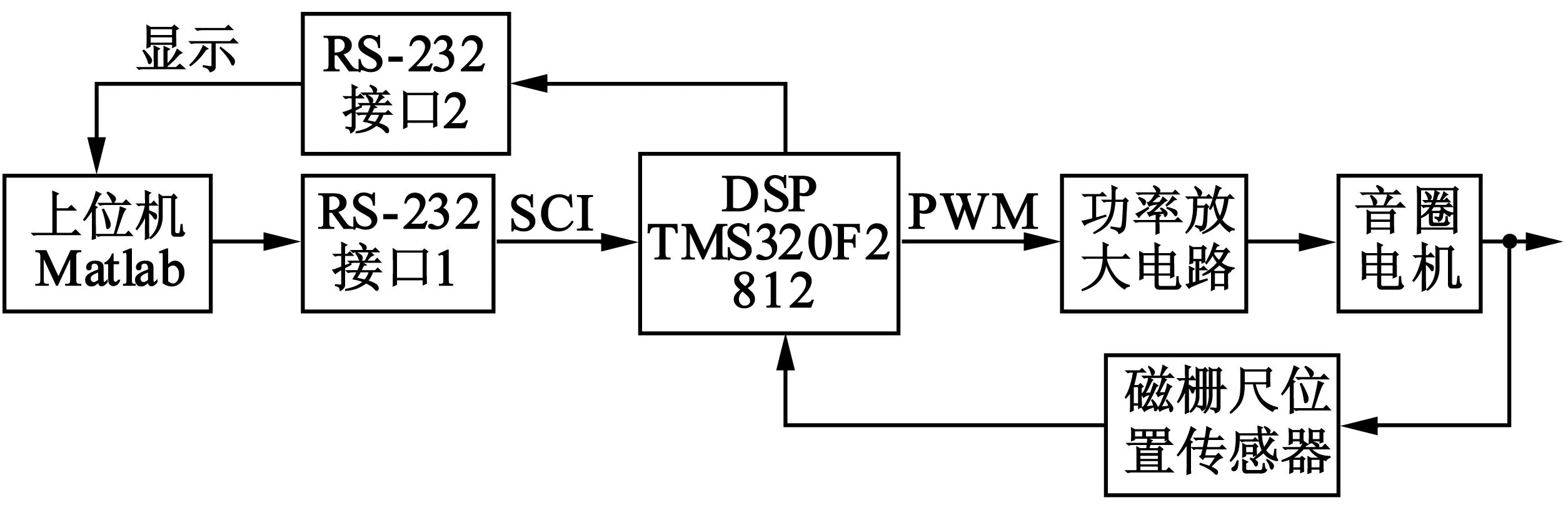
图2 减振系统结构框图
通过MATLAB设定好预设位置,RS-232 1号串口将控制信号传给DSP,产生PWM信号,放大该信号功率后使音圈电动机到达预设位置,磁栅尺位置传感器会对线圈动子所在位置进行采样,经过采集卡采集,获取轴向线圈位置信号并反馈给DSP控制系统,得出位置信号的偏差值,模糊控制算法计算得出占空比,进而改变PWM信号,放大此时信号功率让音圈电动机自动从实际位置达到预设位置,实现对电机的循环控制。
4 减振系统的软件设计
本系统软件控制分2个模块,扩展软件功能方便,操作灵活。一种是系统配置模块,另外一种是系统实验模块。系统配置模块的功能是从串口采集位移数据。在该模块上可以初始化数据采集串口和控制量输出串口。该模块有两路输出:第一路为激励信号,每隔5 ms给发送一次激励,这样实验模块就工作一次,也就是说系统的采样周期和控制周期都为5 ms;第二路输出为采样数据输出,这个输出是二维的,第一维为时间数据,第二维为质量块位移数据。实验模块可以查看内部的参数设置等。
控制程序流程图如图3所示。程序开始首先会对系统各个变量和模块进初始化,在控制电路中,磁栅尺位置传感器对线圈动子所在位置进行采样,经过采集卡采集,获取轴向线圈位置信号x2(t)并反馈给DSP,DSP将所得位置信号与预设位置x1(t)作比较,得到偏差值e(t)=x2(t)-x1(t),若偏差小于误差范围a,则输出PWM控制信号,使电机稳定运行;若偏差大于误差范围,计算得出位置偏差e(t),通过模糊控制算法求得占空比,改变PWM信号的脉宽,使音圈电动机自动从实际位置达到预设位置,实现对电机动子振荡位置的控制和系统的在线循环控制。
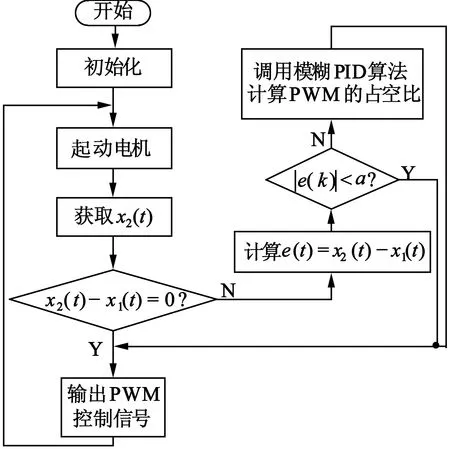
图3 控制程序流程图
5 实验及结果分析


图4 实验装置平台图
上位机MATLAB是基于MATLAB R2013a的Simulink平台开发的一个数据采集及控制系统,MATLAB包容性强,简单易操作,控制器设计可视、方便。对于音圈电动机减振控制系统,可在该平台上建立数学模型,分析二阶系统的动态特性,分析系统的频率特性,以及针对系统设计控制器。在实验设计上,首先可以建立数学模型,然后进行系统分析,最后进行控制器设计的整个过程。图5为系统配置模块图,本实验选择实验2,数据串口为2,控制串口为1。
在MATLAB中打开“Mechanical response platform.slx”文件,通过“Set Control”模块向系统输出力。如图 6为试验系统模块。
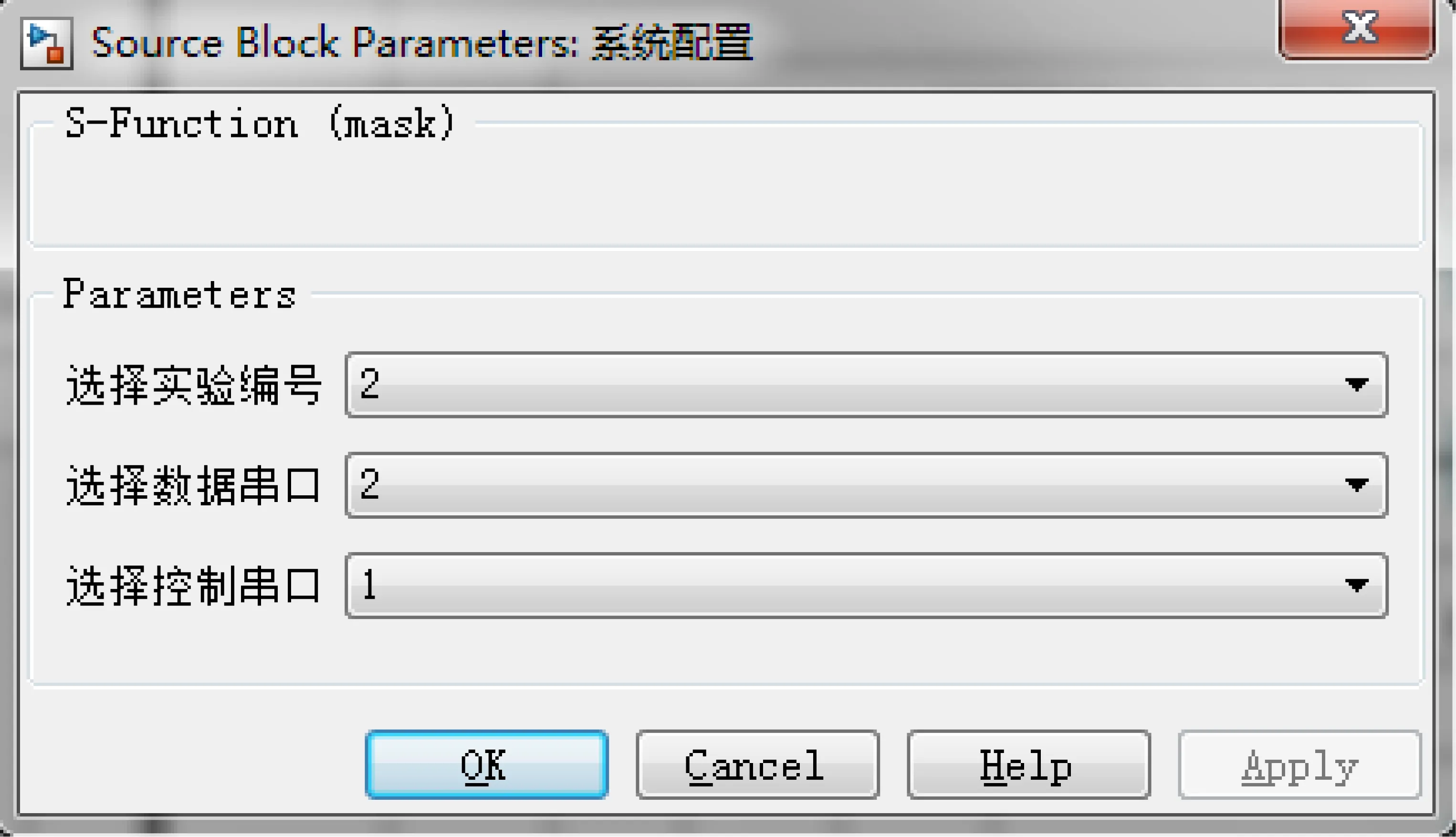
图5 系统配置模块图

图6 试验系统模块
开始运行系统,等质量块静止时,将小球抬起40°,然后放下,撞击质量块,质量块受撞击产生振荡,等质量块静止时,停止系统运行,观察弹出的响应曲线图,并将其存储;然后加入PID控制器,重复试验;最后,加入模糊PID,重复试验,观察实验仿真,并将其存储。图7 为小球撞击质量块实验状态图。
图7 小球撞击质量块实验状态图
待质量块恢复稳定,点击MATLAB停止按钮,系统会自动获取磁栅尺的位置反馈信号,生成仿真图。图8为系统受到撞击后动子自振荡响应曲线,图9中的实线和虚线分别表示,在减振系统中分别加入PID和模糊PID动子的位置仿真。

图8 系统振荡响应曲线
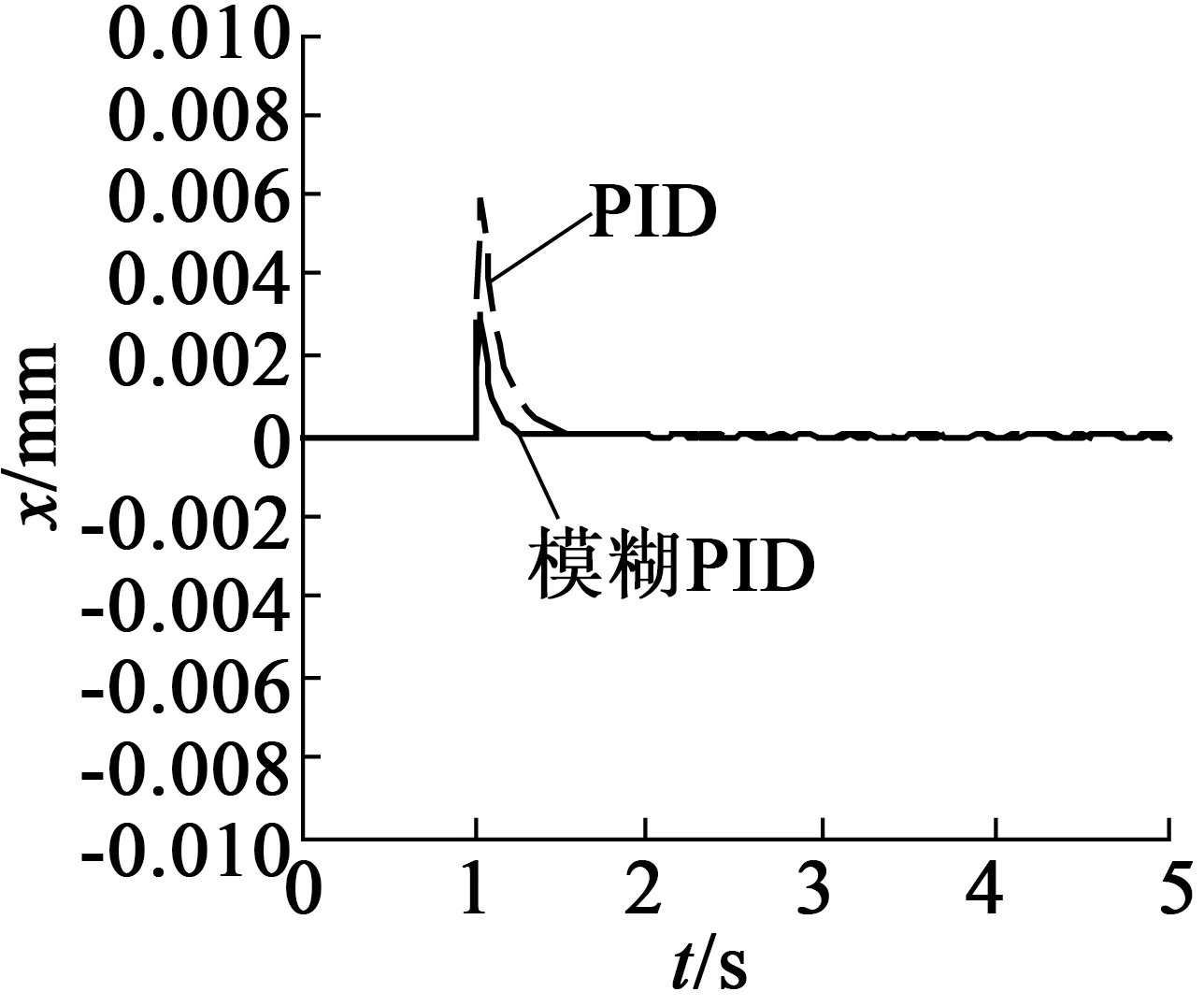
图9 PID控制减振系统振荡响应曲线
从实验结果明显看出,在减振系统中,采用模糊PID控制方法控制音圈电动机,动子恢复原来位置所用时间短,速度快,波动幅度小,更加快速精确地达到原设定位置,缩短了从振动产生到稳定阶段的时间,大幅度提高了系统的响应速度,减振系统的稳定性显著增强,优于传统PID控制方法。
6 结 语
音圈电动机减振系统采用模糊PID,根据动子受撞击后恢复稳定时的超调以及最后的稳定状态可以看出,通过模糊PID调节运算,控制PWM脉冲,从而控制动子快速反应,恢复原来位置,达到稳定状态。从实验结果可以看出,减振系统使用模糊PID,加快了减振系统的响应速度,提高了系统的精确度,振荡波动幅度减小,控制系统的稳定性增强。
[1] 曾建军.基于DSP的地铁制动能量吸收装置设计[J].电力电动化设备,2010,30(3):126-128.
[2] 曾思霖,党选举,张霖.Bouc-Wen迟滞模型的改进与音圈电动机非光滑迟滞特性的描述[J].振动与冲击,2010,29(9):82-85.
[3] 李国芳,潘松峰,王晓.基于模糊PID的无刷直流电机调速系统的建模与仿真[J].工业控制计算机,2014(9):64-66.
[4] 宋晶,郑宾.基于虚拟仪器的模糊PID的设计研究[J].电子测试,2008(11):26-29.
[5] 朱延枫.基于模糊PID复合控制的异步电动机软起动器的设计[J].系统仿真技术,2011,7(3):212-217.
[6] KUMAR N S,KUMAR C S.Design and implementation of adaptive fuzzy controller for speed control of brushless DC motors[J].International Journal of Computer Applications,2010,1(27):36-41.
[7] XIONG Bo,QU Shiru.Intelligent vehicle′s path tracking based on fuzzy control[J].Journal of Transportation Systems Engineering and Information Technology,2010,10(2):70-75.
[8] 陈荣.西藏微水发电模糊频率控制器的研究及仿真[D].拉萨:西藏大学,2010.
[9] 尹训锋,潘松峰,尹峰松,等.基于模糊PID的直线音圈电动机位置[J].工业控制计算机,2016,29(7):16-17.
[10] 王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
The Design of Shock Mitigation System of Linear Voice Coil Motor Based on Fuzzy PID
YINXun-feng,PANSong-feng,YINFeng-song,LIUShuo
(Qingdao Univeisity,Qingdao 266071,China)
There will be vibrate when the mover of linear voice coil motor (VCM) got shock, in order to increasing the stability of system, and reducing the dynamic shock, the operation principle of the motor of the linear VCM was analyzed, and its mathematical model was obtained by the mathematical analysis. Fuzzy control method, the most important is the fuzzy inference, the process could be controlled in the process of changing the three control parameters, and then feedback to the input, and got the results of the experiment. The experiment results show that the fuzzy PID control method can reduce the steady-state error of the feedback system, increase feedback precision and system stability, and achieve the objective of mitigating shock.
fuzzy PID control; linear voice coil motor; mitigate shock
2016-07-29
TM359.4
A
1004-7018(2017)02-0055-04
尹训锋(1990-),男,硕士研究生,研究方向为交流传动语伺服控制。
