B4逆变器驱动矿用电机车无传感器控制系统
2017-04-01王艳,李红
王 艳,李 红
(平顶山学院,平顶山 467000)
B4逆变器驱动矿用电机车无传感器控制系统
王 艳,李 红
(平顶山学院,平顶山 467000)
为了降低矿用电机车电驱组件的成本,使用四开关逆变器代替六开关逆变器以驱动永磁电机。由于B4逆变器省去2个开关器件,针对其存在直流侧电容中点电压波动的固有弊病提出电压补偿策略,同时针对矿用设备要求的无传感器设计,采用基于反电动势检测的控制算法,并在其基础上提出动态系数给定策略以提高估算速度和精度以满足全速域运行。实验结果表明,电压补偿算法可以有效消除电机中的电流畸变;而动态系数控制策略可以实现电机全速域的位置角快速估算并有效抑制信号噪声。所介绍的基于B4逆变器的永磁电机无传感器控制系统满足矿用电机车的控制需要。
四开关逆变器;矿用电机车;无传感器控制;动态系数策略
0 引 言
高性能永磁电机控制系统通常采用三相六开关逆变器驱动,因开关器件价格昂贵,为了降低成本,有文献提出三相四开关逆变器(简称B4逆变器),并成功应用到永磁电机驱动中[1-2]。
但是B4逆变器应用过程中的直流侧电容中点电位平衡一直是难以解决的问题。文献[3]提出根据电容电压脉动波形确定开关的工作状态,但是计算和监测复杂。文献[4]通过控制电流以降低两电容间的电压差,同时降低了系统的控制性能。本文采用直流侧电压补偿以实现电容中点电压平衡,提高控制系统性能。
此外,针对矿用电机车要求的无传感器控制[5],采用简单易行的反电动势检测算法。但是需避免此算法应用到B4逆变器中存在的低速响应慢、高速噪声大等问题[6]。因此本文针对算法特性,提出动态系数控制策略以提高电机车的动稳态性能,目的在于使B4逆变器可以取代传统六开关逆变器应用到矿用电机车中。
1 B4逆变器结构及工作原理
1.1 节点电位分析
与传统三相六开关逆变器不同,B4逆变器仅含有4个开关管,因此其中的一相负载必须接地[3,7],如图1所示。假定C相为负载接地相,则c点的电
动势vc=0。因此其矢量关系相当于在常规六开关三相电压的C相施加了一个幅值相等、方向相反的电压矢量,如图2所示。则B4逆变器输出电压矢量
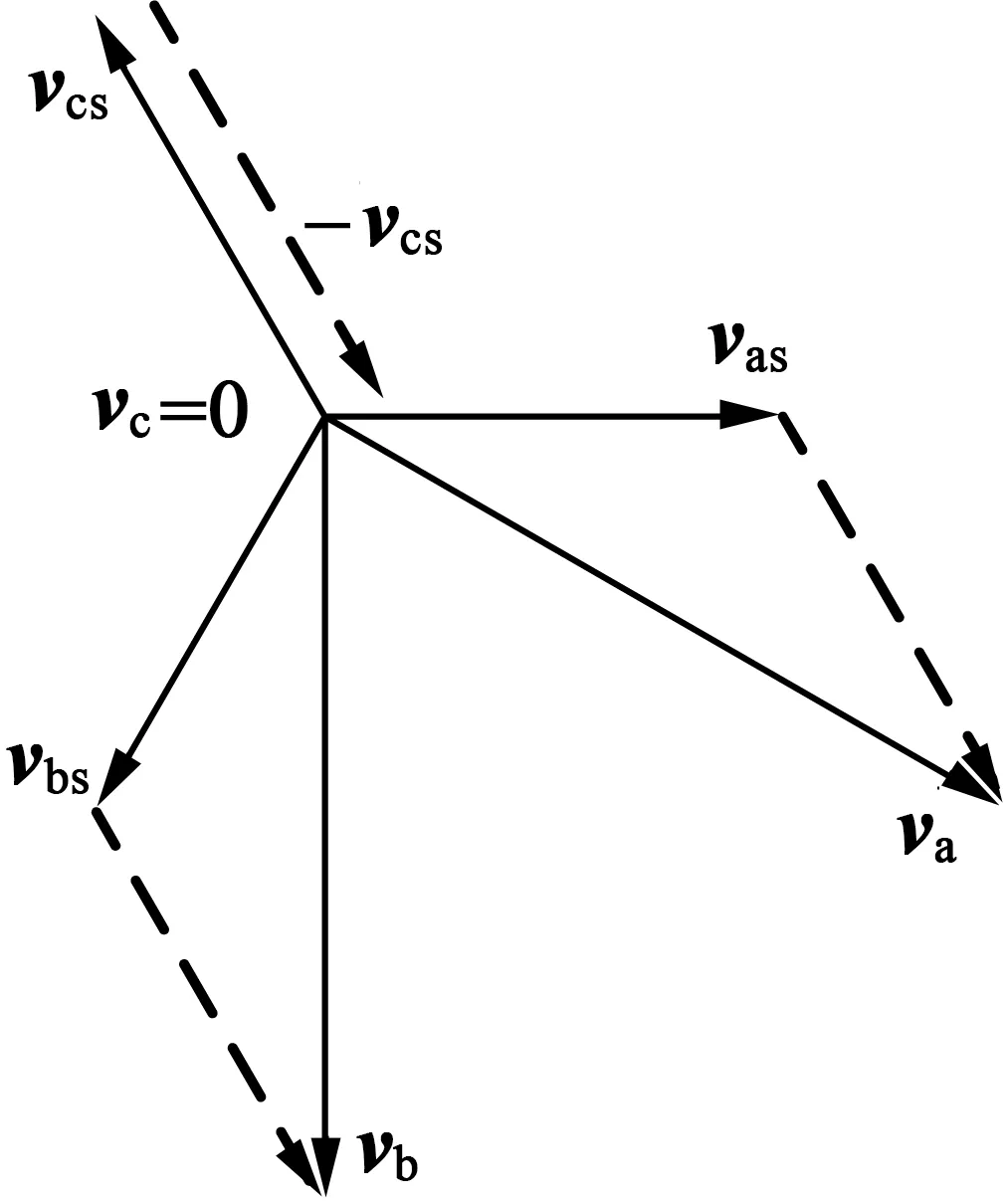
图2 电压矢量示意图与B6逆变器的关系:
1.2 中性点电压畸变及补偿
实际应用中的B4逆变器结构如图3所示,直流侧由不控整流桥供电,C相连接直流电容的中点,因此直流侧电压输出vdc′存在波动。由此可知,图3中性点c′电压不能恒定为0,同理A相和B相电压也会出现偏差,从va和vb变化到va′以及vb′,故负载电流存在畸变。加之实际电容性能的非理想化,所以v1≠v2,此时的中点电位的准确表示
式中:v1,v2和vdc′的含义如图3所示。

图3 B4逆变器的应用结构
为了提高控制算法的精度同时降低电流谐波,需要对电压畸变进行补偿。由于c点电势为0,则定义va′表示如下
结合式(2)、式(3),则a点电势可以修正为下式
上式表明,a点电势与c点电势具有相关性。同理可以将b点电势修正为
2 无传感器控制算法
2.1 电机初始位置固定
考虑到所研究内容的应用场合,同时为了降低系统的复杂度,本文不对电机进行初始位置检测,而是在启动前通过给定信号强行将转子牵引到特定位置。此种方案在洗衣机、冰箱等场合应用广泛。除去不合理的开关状态,B4逆变器共有4种工作模式,如表1所示。

表1 B4逆变器的工作模式及对应的开关状态
当电机工作在模式1时,其功率流图如图4所示。在此工况下,vc′点的电位从0逐步升高,因此有v2>v1,上下电容存在较大的电势差。此电压不平衡问题会使转子对齐难度增大。模式4存在同样问题。而当电机工作在模式2或3时,电容电压对称施加,因此可以保持中点电压平衡,如图5所示。因此本文选用模式3作为转子定位方案。

图4 模式1时的电能流向

图5 模式3时的电能流向
2.2 无传感器控制算法及其稳定性分析
系统整体控制结构原理如图6所示。图中含下标M的量表示观测器的估算值。无传感器算法通过检测电机电流及电压估算出反电动势eM和转子位置θM,并对角度信号求导即可估算电机的瞬时位置。图6中的ωM0为滤除高次谐波后的转速估算值。
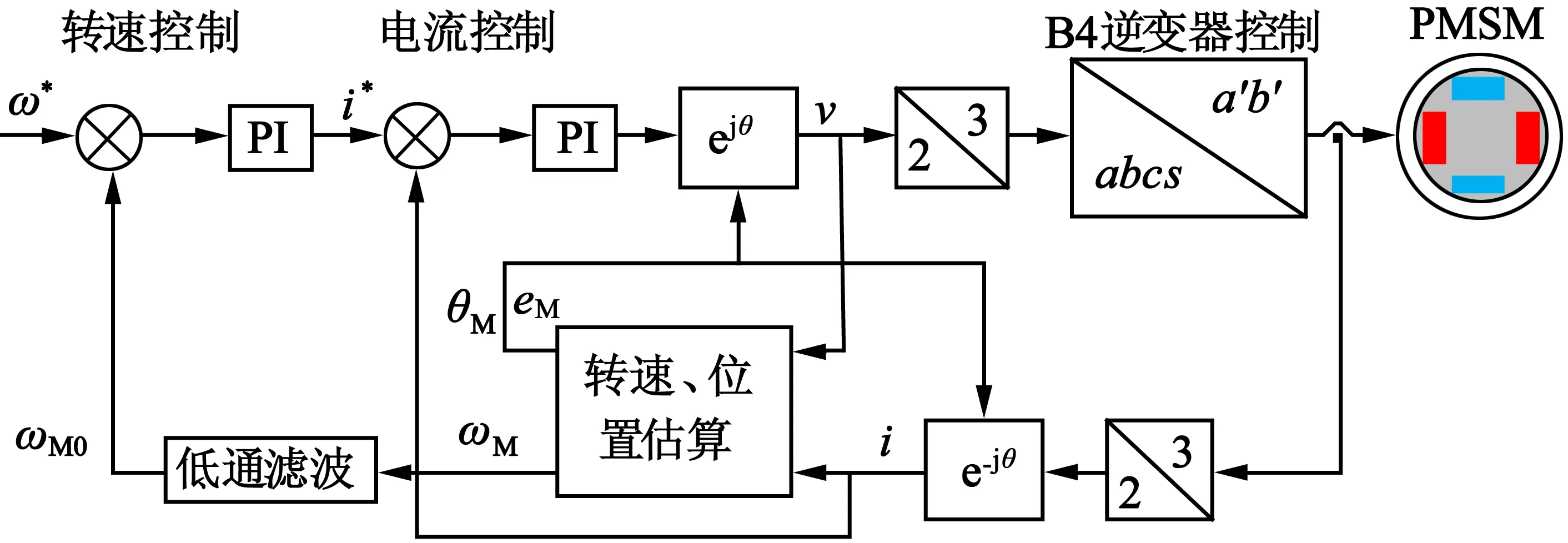
图6 系统控制结构框图
凸极式永磁电机d,q轴等效电压以及反电动势分别如下:
式中:vd,vq分别表示d,q轴定子电压;R为定子电阻;Ld,Lq为d,q轴电感;ω为电机转速;id,iq为d,q轴电流;e为反电动势;KE为反电动势常数。
永磁同步电机简化模型如图7所示。图中d-q轴表示电机实际的转子位置,γ-δ坐标系为观测位置,Δθ表示两坐标系间的位置误差。因此由式(6)可知,在γ-δ坐标系下的电压表达式如(8)所示。
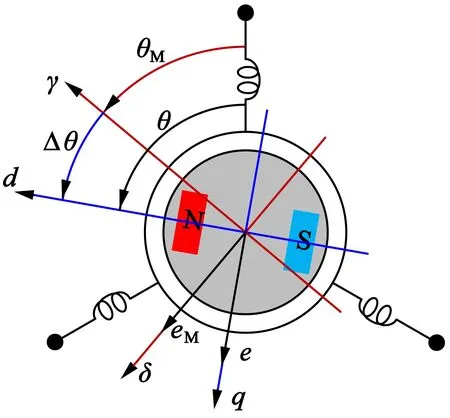
图7 永磁电机等效模型
则γ-δ坐标系下电流的倒数:
假设采样周期T远小于电流时间常数,将式(9)代入式(8),有:
式中,上标n表示在第n采样时刻的暂态结果。则第n采样时刻的观测电流可以改写:
观测电流误差Δi=i-iM可以表示:
当Δθn-1趋近于0时,上式可近似转化为:
式中,观测的反电动势误差定义


通过式(16)可以估算出瞬时转速
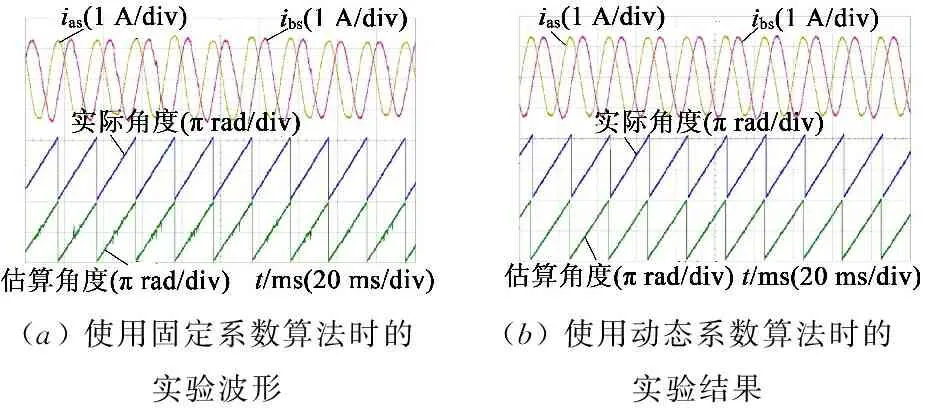
式中:K为平滑系数,0 假设电机的转速响应时间远低于处理器的算法处理时间,则在采样过程中可以认为电机的转速和反电动势恒定不变。因此位置信号可以表示为: 结合式(15),式(16),式(20)可得: 若上式矩阵的特征值1-Ke·T/Lq和1-Kθ|en-1|T/Ld的绝对值都小于1,则所设计的控制系统是绝对稳定的。因此所假定的相关系数Ke和Kθ必须服从以下区间: 2.3 相关系数的选取 由式(22)可知,在稳态情况下,相关系数Kθ与电机转速负相关。因此当转速上升时减小Kθ的值可以有效拓宽算法的稳态运行区域。鉴于此,本文中的Kθ值定义如图8所示。 图8 相关系数Kθ在不同转速下的值 由图8可知,本文设定Kθ与电机转速负相关,并在较高转速时保持为较小值。由于较大的系数值会导致系统测量噪声较大,但是同时较小的系数值会降低系统的计算过程,因此本文通过仿真选取了Kθ的上下限。同时由式(22)可知,Ke的大小只与Lq有关,而在电机运行时Lq的变化不大,此时设定Ke=2。 实验所用的无传感器控制三相四开关电驱系统组件和结构如图9所示。以TMS320F28335型DSP为主控芯片,辅以测量电路,可控开关为IGBT。 图9 控制系统结构图 有无使用电压补偿策略的实验结果对比如图10所示。在此对比实验中,系数Kθ均采用变系数策略。由图10对比可知,采用电压平衡算法控制其电流波形正弦度和对称性都更优。后几组对比实验均采用了此电压补偿算法。 (a)不使用电压平衡算法时实验波形(b)使用电压平衡算法时实验波形 图10 转速为300r/min时的实验结果 在电压补偿算法的基础上,采用动态系数策略验证电机在不同开关模式下的起动性能,其实验结果波形分别如图11(a)、图11(b)所示。其中,电机实际角度通过外设编码器获得。 (a)模式1时实验波形(b)模式3时实验波形 图11 两种不同模式下的实验结果 图11(a)、图11(b)分别对应模式1和模式3下电机从转子位置对齐到加速至1 000r/min的实验波形。由图11可知,在模式3下电机可以快速稳定的加速至给定转速,同时在全速域范围内角度估算都非常准确;而模式1下,电机难以正常起动。主要原因是直流侧电容电压不平衡导致A相和B相电流为0,如图11中箭头①所示。因此逆变器失去了对相电流的控制能力,而导致位置估算不准确,所以起动失败。因此,为了实现更高的性能,选用模式3作为转子定位方案,与前文理论分析一致。 在低速域运行时(100r/min),固定系数Kθ=0.1以及动态系数两种方案下的运行结果分别如图12(a)、图12(b)所示。由图12可知,当固定Kθ为一个较小数值时,不能获得稳定的运行效果。由于Kθ值较小,所以估算过程缓慢,因此估算角度与实际角度容易出现较大偏差。动态过程中最大角度偏差达到πrad,初稳态时依然存在π/5rad的偏差。 随着稳态运行时间的延长,角度误差逐渐减小。因此图12(a)验证了理论分析中提到的在初始估算时刻应该给定较大的系数值。图12(b)应用了所提的动态系数控制策略,由图12可知,电机可以实现全速域的稳态运行,并且角度估算更加准确。 (a)使用固定系数算法时的实验结果(b)使用动态系数算法时的实验结果 图12 转速为100r/min时的实验结果 为了验证电机高速运行时系数Kθ对估算性能的影响,设计实验固定Kθ=0.4以及变系数策略,结果分别如图13(a)、图13(b)所示。 (a)使用固定系数算法时的实验波形(b)使用动态系数算法时的实验结果 图13 转速为1 500r/min时的实验结果 由图13(a)可知,较大的系数会导致角度估算产生较大的噪声,同时电流存在畸变。而动态系数方案中的系数随转速增大而减小,可以有效抑制角度估算中噪声的产生,同时电流正弦度更好,如图13(b)所示。 本文针对矿用电机车的实际情况提出基于B4逆变器驱动的永磁电机无传感器控制策略。为了解决直流侧电容中点电压畸变而提出电压补偿方案。同时为了提高基于反电动势法无传感器控制算法的动稳态性能,提出动态系数法。动态系数控制策略可以有效提升电机低速时的响应速度,同时降低高速时的信号噪声。实验验证了所提改进算法的有效性。因此,基于电压补偿和动态系数策略的无传感器控制策略可以应用到B4逆变器驱动的矿用电机车中,能够有效降低系统的成本。 [1] 沈艳霞,纪志成,姜建国.基于四开关逆变器的无刷直流电机控制[J].电力电子技术,2003(6):4-6. [2]MASMOUDIM,ELBADSIB,MASMOUDIA.DTCofB4-unverter-fedBLDCmotordriveswithreducedtorquerippleduringsector-to-sectorcommutations[J].IEEETransactionsonPowerElectronics,2014,29(9):4855-4865. [3]LEEDM,PARKJB,TOLIYATHA.AsimplecurrentripplereductionmethodforB4inverters[J].JournalofElectricalEngineering&Technology,2013,8(5):1062-1069. [4]LEEDM,JUNGJW,HEOSW,etal.Analyticmodeloffour-switchinverter-feddrivingsystemforwyeordelta-connectedmotorwithcurrentripplereductionscheme[J].JournalofElectricalEngineering&Technology,2016,11(1):109-116. [5] 陈名辉,阮毅,宗剑,等.无速度传感器在矿用电机车矢量控制系统中的应用[J].电机与控制应用,2012,39(2):17-20. [6]HALVAEINA,VAHEDIA,MOGHBELLIH.Anovelpositionsensorlesscontrolofafour-switch,brushlessDCmotordrivewithoutphaseshifter[J].IEEETransactionsonPowerElectronics, 2008, 23(6):3079-3087. [7]DASQUPTAS,MOHANSN,SAHOOSK,etal.Applicationoffour-switch-basedthree-phasegrid-connectedinvertertoconnectrenewableenergysourcetoageneralizedunbalancedmicrogridsystem[J].IEEETransactionsonIndustrialElectronics,2013,60(3):1204-1215. Sensorless Control of Mine Electric Locomotive Drive by B4 Inverter WANGYan,LIHong (Pingdingshan University,Pingdingshan 467000,China) In order to reduce the cost of mining electric locomotive electric drive components, a four-switch inverter was used for replaceing six-switch inverter to drive the permanent magnet motor. Since the B4 inverter switching devices eliminating two proposed compensation policy for the DC voltage side capacitor midpoint voltage fluctuations inherent shortcomings of its existence. While no sensor design for mining equipment requirements, the control algorithm based on counter electromotive force detection, and proposed a dynamic coefficient of a given policy to improve the speed and accuracy of estimation domains running at full speed to meet on its basis. Experimental results show that the voltage compensation algorithm can effectively eliminate the motor current distortion; and dynamic coefficient control strategy can achieve full speed position angle of the motor domain and effectively inhibit the rapid estimation of signal noise. Based B4 inverter sensorless permanent magnet motor control system to meet the control needs of the proposed mining electric locomotives. four-switch inverter; mine electric locomotive; sensorless control; dynamic coefficient of strategy 2016-08-25 河南省科技厅科技攻关计划项目(142102210227) TM464 A 1004-7018(2017)02-0046-05 王艳(1985-),女,硕士,助教,研究方向为电机控制、电力电子。
3 实验分析




4 结 语
