基于图像处理的激光测距研究与实现
2017-03-31四川文理学院达州智能制造产业技术研究院四川达州635000
涂 朴(四川文理学院达州智能制造产业技术研究院 ,四川达州635000)
基于图像处理的激光测距研究与实现
涂 朴
(四川文理学院达州智能制造产业技术研究院 ,四川达州635000)
利用激光光源和CCD相机设计出一套测距系统.采用激光笔和摄像头作为测量设备,利用开源图像处理库OpenCV对摄像头照片进行相关图像处理,找到激光点在摄像头成像照片中的位置;然后利用该位置坐标信息,建立测距模型,通过几组已知的测量参数校正测距公式的参数,建立激光点成像位置信息和物体与测距系统距离之间的函数关系,从而实现测距.
测距;激光测距;图像处理
0 绪论
警务办案人员进行案发现场勘验时,需要绘制现场勘验图,目前都是采用手动的形式进行.如果这项工作能够自动进行,将会为办案人员带来极大的便利.随着计算机技术的迅猛发展,以及数字图像处理技术日益成熟,该项技术将变得可能.生成现场勘验图,就是对房间二维平面内物体坐标的定位.这里主要涉及到两个难点:房间物体的自动识别,以及房间物体坐标的定位.可以通过数字图像处理技术进行物体的识别.本文主要讨论物体定标相关的物体距离问题.为了方便讨论,假设房间平面图为矩形,如图1(a),假设测量点O到墙角A,B,C,D的距离已知,即L1,L2,L3,L4已知,且θ1,θ2,θ3,θ4已知,我们便可以求解出该多边形的边长.同理,假设房间内目标物体M,到观测点O的距离OM已知,OB旋转到OM的夹角已知的话,M点在二维平面内的坐标便可以求解得到.[1]当我们在实际测量的时候,摄像头不可能落在在房间平面上,其示意图如图1(b)所示 O点为摄像头所在的位置,A,B,C,D为房间的四个角,M点为房间待测内物体所在的位置,还是同上面的假设一样,在三角形MBO中,L1和L2为
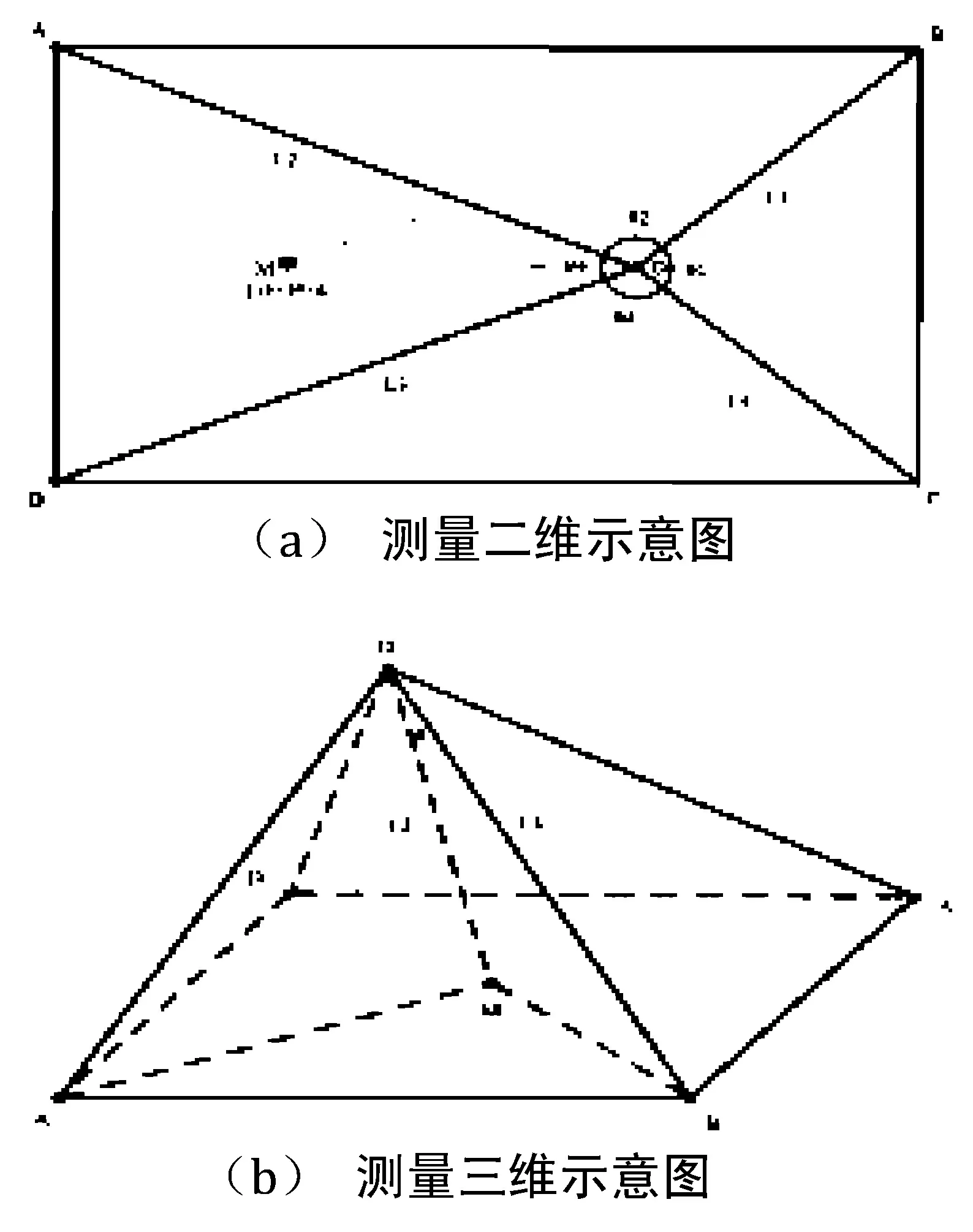
图1 房间距离测量模型示意图
已知,L1,L2之间的夹角θ已知,则可以算出MB的长度,同理在三角形AMO中,可以求得AM的长度,在平面ABCD内,三角形AMB,AM,BM已知,同理我们假设角AMB为已知,则可以求得M点的坐标.[2]通过上面的分析我们知道,要进行物体定标,我们需要测得距离和角度,测量角度可以借助陀螺仪工具,本文设计了一种距离测量方法.
1 基于摄像头的激光测距原理
本文提出一种距离测量的方法:基于摄像头的激光测距.图2所示,为激光测距原理.

图2 激光测距原理示意图
激光束被认为是理想的平行于摄像头的中心光轴.一束激光被投射到目标物上,并在摄像头上被显示,那么这个点的位置在图帧中的位置是确定的.然后我们只需要计算这个点在沿着y轴的距离,就能计算出目标物离摄像头的距离,激光点距离中心越近,离目标物越远.假设,激光点在CCD上的成像到CCD成像中心的距离为假如我们的激光笔安装在摄像头的正上方的中心位置处,即不论距离多远,激光在CCD上面的成像,只是在Y轴方向发生偏移,而在X轴方向坐标位置是固定的,同理,若装在摄像头的左边或者右边,激光点在摄像头上的成像只是在X轴方发生偏移,而在Y轴方向是不变的,以下公式便可以求得摄像头到目标物体的距离,如公式1、2所示.
θ=p*k+r
(2)
其中k为单个像素点代表的弧度,p为激光成像点到成像中心之间像素点的个数,r为安装角度补偿,h激光中心到摄像头中心的距离.(如果垂直安装,即为垂直距离,如果水平安装,即为水平距离)代入上式即可求出距离D的表达式,如式(2)所示.
(3)
2 关键问题研究
从上面的讨论中,可以发现:当安装高度固定时,求出激光点在CCD上的成像到CCD成像中心的像素点的个数,便可以求得激光点到目标物体的距离,实验中对数据进行处理时,是不能够对CCD上面的成像进行直接处理,而是通过处理相机的照片,由于CCD上面的成像和照片是等比例放大的,经过多次试验已经论证,对照片进行处理的模型依然遵循上述的规律.
准确的找到激光点在相片中的成像位置是进行激光测距的关键.利用激光点的成像,以及激光源安装位置这两个特点,可以对激光点成像位置进行定位.不难发现,激光点在照片中的成像比较接近白色.因此,首先通过设置合适的阀值,对成像图片进行图像二值化,将图片变成黑白颜色.然后通过平滑处理过滤小噪声的干扰,高斯采样,膨胀处理,消除目标不连续产生的空洞;查找轮廓,定位到激光点的像在照片中的位置,然后根据前面讨论的X轴坐标不变性(垂直安装时),进行进一步的过滤.[3-6]图3分别为程序对图形进行相关处理的系列过程.

图3 图像处理效果截图
3 实验数据分析
实验中,采用的是用激光笔和摄像头组合成的一个简单的测距系统,本文摄像头分辨率为1920*1080.在实验过程中,需要根据已知的一组点,来对参数k和r0进行标定,来提高测量精度.如表1所示,将挡板依次放在实测距离40cm-740cm处,通过程序获取激光笔在挡板上成像点距离中心点的像素点个数,从而求得拟合的参数k和r0.

表1 实测像素点个数和实际距离的关系表
根据上表,已知激光笔的安装位置到摄像头的距离为7.6cm,两组数据带入到公式求出系数k和r0,通过距离公式,便可以进行距离测量.
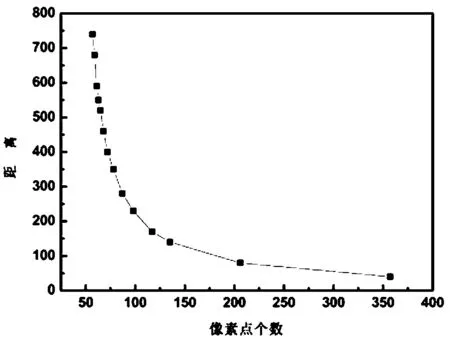
图4 数据拟合曲线
图4为根据已知数据对进行的数据拟合曲线.通过拟合曲线可以看出,拟合曲线效果非常好,因此,所求的的拟合系数满足之前的讨论,可以运行到实际测距系统中.
4 总结
通过试验发现,此种安装方法,该仪器的有效测量范围为20cm-500cm,该范围内的测量误差为5cm,此处实验采用的摄像头分辨率为1920*1080,为了提高精度,可以选用更高分辨率的摄像头.或者将激光笔安装在摄像头的左侧或者右侧,由于试验器材制作上的原因,此处我们将激光笔安装在摄像头的正上方,此处可以;另外增大激光笔和摄像头之间的距离,可以测得更远,但是会牺牲近距离的测量精度和最小测量范围;由于很多场合距离的测量远远超过500cm范围,此处提出一种方案:安装激光笔时,让激光笔打出的光线和摄像头的光轴之间保持一定的夹角,然后通过测得的数据,进行数据拟合,该种方式不但可以增加测量的范围,还能够提高测量精度.
[1] 郭 磊,徐友春,李克强.基于单目视觉的实时测距方法研究[J].中国图象图形学报,2006(1):74-81.
[2] 蔡健荣.双目立体视觉系统摄像机标定[J].江苏大学学报:自然科学版,2006(1):6-9.
[3] 邱茂林.计算机视觉中摄像机定标综述[J].自动化学报,2000(1):43-45.
[4] 陈胜勇,刘 盛.基于OpenCV的计算机技术实现[M].北京:科学出版社,2008:42-68.
[5] 刘瑞祯,于仕琪.OpenCV教程:基础篇[M].北京:北京航空航天大学出版社,2007:243-402.
[6] 汤 超.OpenCV的运动目标检测[D].厦门:厦门大学,2009:11-21.
[责任编辑 范 藻]
Research and Implementation of Laser Ranging Based on Image Processing
TU Pu
(Dazhou Intelligent Manufacturing Industrial Technology Institute of Sichuan University of Arts and Sciences, Dazhou Sichuan 635000, China)
In this paper, a feasible ranging system is designed by using laser and CCD camera. A laser pen and a camera was used as the measurement devices and processing the photo generate by the camera by using the open source image processing library OpenCV to find the position of the laser spot in the camera images; and then using the position coordinates information and the range models to find the formula parameters by the using of a few sets of known measurement parameters. As a result, we can establish the function between the position of the laser spot image information with the distance between the laser and the objects to be measurement. Then the goal of the ranging will be achieved.
distance measurement; laser ranging; image processing
2016-11-20
四川省教育厅项目(14ZB0314);四川文理学院校级项目(2014Z004Y)
涂 朴(1984—),女,四川达州人.讲师,硕士,主要从事智能控制技术研究.
TP391
A
1674-5248(2017)02-0042-03
