馈能式电磁作动器馈能与阻尼特性研究
2017-03-20王兴野张进秋黄大山彭志召
王兴野,张进秋,黄大山,张 建,彭志召
(装甲兵工程学院装备试用与培训大队,北京 100072)
馈能式电磁作动器馈能与阻尼特性研究
王兴野,张进秋,黄大山,张 建,彭志召
(装甲兵工程学院装备试用与培训大队,北京 100072)
为探究基于“旋转电机+齿轮齿条”结构的馈能式电磁作动器的工作特性,在分析其工作原理的基础上设计并研制了一款该型作动器,阐述了其结构设计与参数计算流程,理论分析了馈能式电磁作动器的馈能特性和阻尼特性,并进行了台架试验。结果表明:馈能式电磁作动器的反馈电压和电磁阻尼系数主要与激振速度和外接负载电阻的大小有关。这为后续研究中对馈能式电磁作动器的阻尼和反馈电压的精确控制奠定了基础。
馈能式电磁作动器; 齿轮齿条; 反馈电压; 阻尼
电磁作动器具有无泄漏、响应速度快、可控性好及不受环境因素影响等优点,国内外学者对不同形式的电磁作动器进行了大量研究,采用的结构包括直线电机[1-2]、“旋转电机+滚珠丝杠”[3-5]、“旋转电机+齿轮齿条”[6-7]和液压马达[8]等。由于采用直线电机和“旋转电机+滚珠丝杠”结构的电磁作动器结构相对简单、体积较小,因此基于这2种结构进行的研究较多,部分已在实车上进行了应用[1]。然而,采用直线电机结构的电磁作动器存在出力较小、可靠性较低等问题,而采用“旋转电机+滚珠丝杠”结构的电磁作动器存在抗冲击性较差、高频振动时控制效果不明显等问题[3]。尽管基于“旋转电机+齿轮齿条”结构的电磁作动器研究相对较少,但取得了较好的试验效果。BENO等[6]为HMMWV车研制的基于“旋转电机+齿轮齿条”结构的电控主动悬挂系统,与LI等[7]为普通越野车辆设计的齿轮齿条结构馈能吸振器均具有较好的减振与馈能特性。
笔者针对某型4轮车辆设计一种“旋转电机+齿轮齿条”结构的馈能式电磁作动器,并通过台架试验对其馈能与阻尼特性进行研究,为后续研究“旋转电机+齿轮齿条”结构的馈能式电磁作动器的控制特性奠定基础。
1 馈能式电磁作动器工作原理
馈能式电磁作动器工作原理用图1所示的2自由度1/4车辆模型进行说明:地面不平激励通过车轮和馈能式电磁作动器传递给车体,加速度和位移传感器采集车辆状态信息并传输到控制器,控制器根据设定的控制策略选择进行主动出力控制或者电磁阻尼控制并回收能量,即当控制策略为主动出力控制时,控制器将控制信号传递给电机驱动器,通过控制电机的输入电流控制电机输出力矩;当控制策略为电磁阻尼控制时,控制器将控制信号传递给蓄能电路,通过调节电路中的参数控制电机的制动力矩,同时回收电机产生的电能。
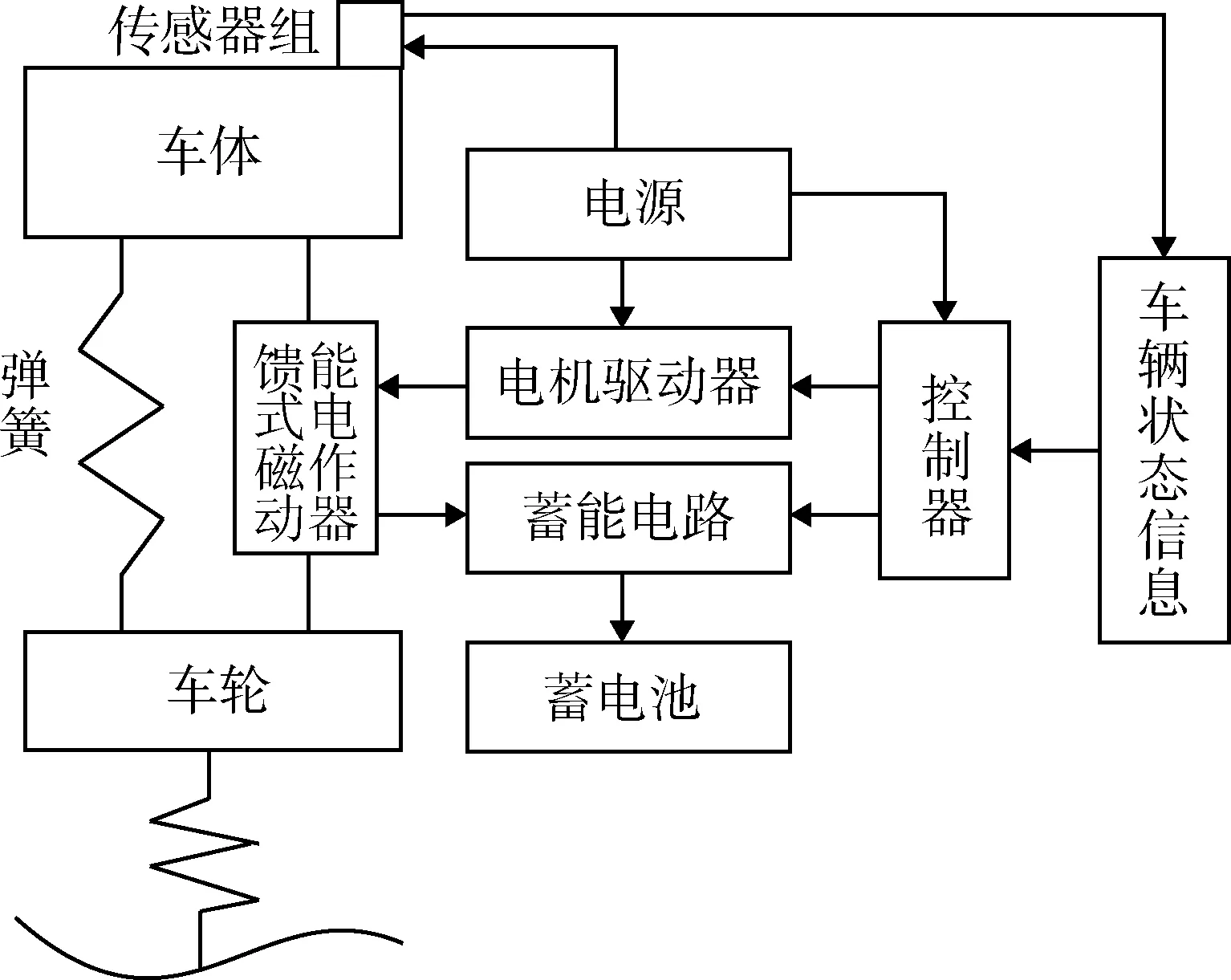
图1 馈能式电磁作动器工作原理
2 馈能式电磁作动器的设计
馈能式电磁作动器的设计采用“旋转电机+齿轮齿条”结构,为满足实车的使用要求,需要根据车辆的具体参数进行设计。图2为馈能式电磁作动器结构,其主要由旋转电机、减速机、齿轮、齿条和直线导轨等部件组成。
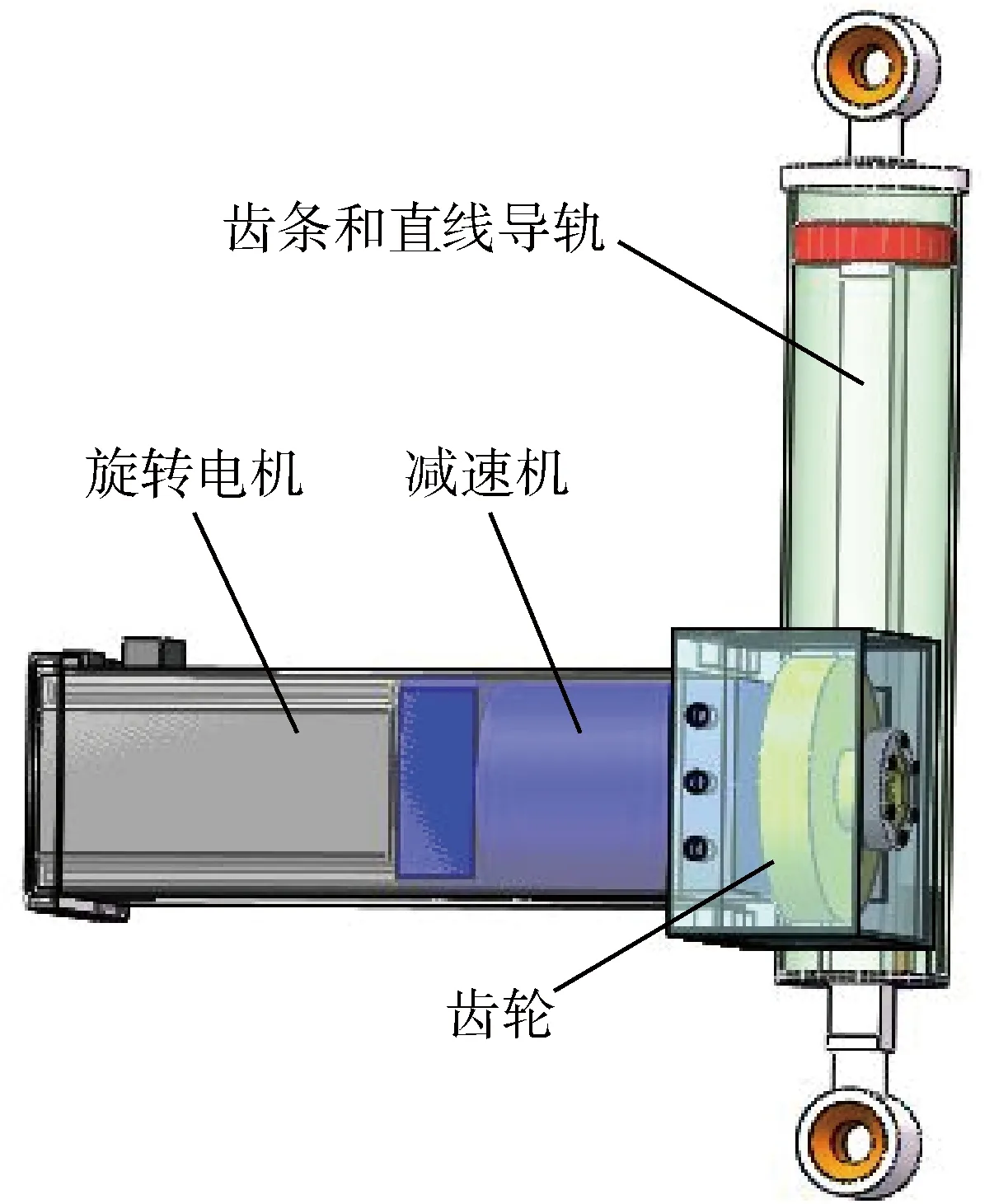
图2 馈能式电磁作动器结构
2.1 电机选型
针对本文所研究的4轮车辆,仍以2自由度1/4车辆模型为例进行分析,其车体质量ms=345 kg。在对作动器进行设计时,作动器最大出力一般为车重力的0.9倍,其最大相对运动速度vmax=0.52 m/s[9]。因此,本文中馈能式电磁作动器最大出力Fmax=0.9msg=3 042.9 N,其最大功率Pmax=Fmax·vmax=1 582.3 W。在实际使用过程中,电磁作动器工作于最大出力状态和最大速度状态的时间一般都很短,只是一个瞬态的过程,这样可充分利用伺服电机的过载能力。取过载比例为300%,则可得到电机的额定功率P=Pmax/3=527.4 W,考虑到电机、传动装置和作动器的机械损耗,选择电机的额定功率P=1 000 W。初步选定电机型号为Motec SEM-80C10303HN,其主要技术参数如表1所示。
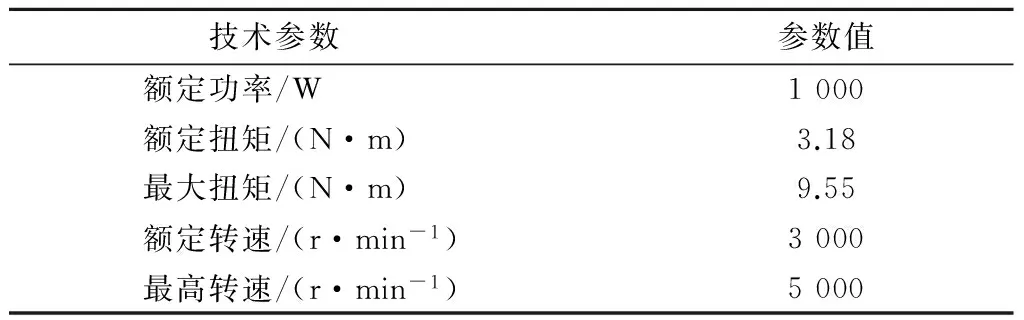
表1 Motec SEM-80C10303HN电机的主要技术参数
2.2 齿轮齿条及减速机参数设计
齿轮齿条是将馈能式电磁作动器的直线运动和电机的旋转运动相互转化的机构,其直线导轨的一端与馈能式电磁作动器的底盖连接,另一端与齿条并联,起导向与减小摩擦的作用。齿轮齿条的设计要求为:齿条的工作行程大于馈能式电磁作动器的动行程,同时齿轮的分度圆半径应当尽量小,以减小整个结构的尺寸,但必须保证其强度能够满足要求。根据馈能式电磁作动器的安装空间,初选齿数为19、模数为3的齿轮齿条机构,则分度圆半径Rg=0.028 5 m。


表2 Motec APE60-16减速机技术参数
3 馈能式电磁作动器特性理论分析
3.1 馈能特性理论分析
当电机工作于发电机状态时,馈能式电磁作动器的反馈电压是三相交流电,经过整流电路整流后,其有效值E为

(1)
式中:Ke为电机的反电动势常数(mV/(r·min-1));n为电机转速(r/min)。n与馈能式电磁作动器的相对运动速度v之间的关系为
(2)
若已知三相电中任意两相之间反馈线电压的幅值E′,则E与E′之间的关系为

(3)
当电机外接负载阻值为R的可变电阻时,可将电机等效为一个电动势为E、内阻为r的电源,则系统可等效为如图3所示的电路。
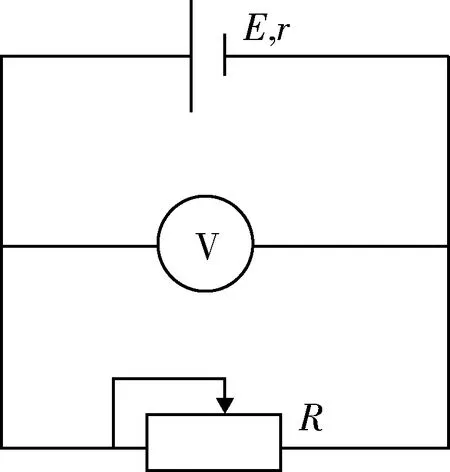
图3 馈能状态下系统等效电路
此时,反馈电流I为

(4)
可变电阻两端的电压U为

(5)
由式(1)-(5)可以看出:馈能式电磁作动器的相对运动速度越大,电机转速越高,馈能式电磁作动器的反馈电压越高;电机外接负载的阻值越大,反馈电流越小,可变电阻两端的电压越高,开路(R→∞)时测得的电压相当于电源的电动势,其值会达到最大。
3.2 阻尼特性理论分析
馈能式电磁作动器的阻尼力f由机械阻尼力fs和电磁阻尼力fa组成。fs与v之间的关系为
fs=csv,
(6)
式中:cs为馈能式电磁作动器的机械阻尼系数,一般为常数。
fa由电机的制动转矩转化而来,当电机工作于发电机状态时,其制动转矩T为
T=Kt·I,
(7)
式中:Kt为电机的转矩常数。
制动转矩经过减速机和齿轮齿条的转化后可提供的电磁阻尼力fa为
fa=Ti/Rg。
(8)
综合式(1)-(8)可得
(9)
(10)
f=fs+fa=(cs+ca)v,
(11)
式中:ca为馈能式电磁作动器的电磁阻尼系数。
由式(9)-(11)可以看出:馈能式电磁作动器的阻尼力随馈能式电磁作动器相对运动速度的增大而增大,随外接负载阻值的增大而减小,开路(R→∞)时fa=0 N,馈能式作动器提供的阻尼力为馈能式作动器的机械阻尼力。
4 馈能式电磁作动器特性台架试验
为了对馈能式电磁作动器的主动出力、电磁阻尼和能量回收进行有效控制,需要对馈能式电磁作动器的阻尼特性和馈能特性进行试验测试。图4为馈能式电磁作动器特性试验台架。其中:激振台可根据设定的速度在规定的行程内往复运动,激振台上的力传感器和位移传感器用于采集馈能式电磁作动器的阻尼力和位移;示波器可对开路电压和可变电阻两端的电压进行测量,并通过数据采集软件进行采集和存储。试验过程中,台架的激振速度即为馈能式电磁作动器的相对运动速度。

图4 馈能式电磁作动器特性试验台架
为测试电磁作动器的阻尼特性与馈能特性,在激振速度分别为0.05、0.1、0.2、0.3、0.4、0.5 m/s,外接负载阻值分别为25、50、75、100 Ω和开路条件下,对可变电阻两端电压和馈能式电磁作动器的阻尼力进行测试与采集。当外接负载阻值为25 Ω、激振速度为0.3 m/s时,阻尼力已经达到1 071 N,可变电阻出现了过热的情况,出于安全方面的考虑,未再进行更大激振速度的试验。
4.1 馈能特性试验数据分析
试验时,激振台在每一激振速度和外接负载阻值条件下进行5次往复运动,虽然设定了激振速度,但实际是一个激振速度由0加速到设定值再减速到0的循环过程。因此,波形的最大幅值为该设定速度下可变电阻两端电压的幅值。图5为外接负载阻值为25 Ω、激振速度为0.05 m/s时,可变电阻两端电压随t的变化曲线。可以看出:可变电阻两端电压呈正弦变化,幅值最大处可达12.6 V。
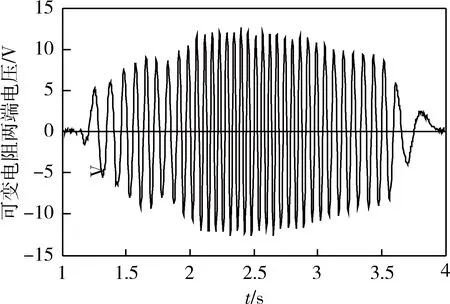
图5 外接负载阻值为25 Ω、激振速度为0.05 m/s时可变电阻两端电压随t变化曲线
由于试验组数较多,本文不进行一一列举。通过对试验数据进行统计分析,可得到不同外接负载阻值时可变电阻两端电压幅值随激振速度的变化曲线,如图6所示。可以看出:在外接负载阻值不变的情况下,可变电阻两端电压幅值随激振速度的增大而增大,且线性度较好;当激振速度不变时,外接负载阻值越大,可变电阻两端电压幅值越大,但变化量很小,这是由于电机内阻r=2.5 Ω,与外接负载阻值相比较小。由式(5)可知:当外接负载阻值远大于内阻值时,外接负载阻值变化对其两端电压变化的影响很小,试验结果与理论分析相符。
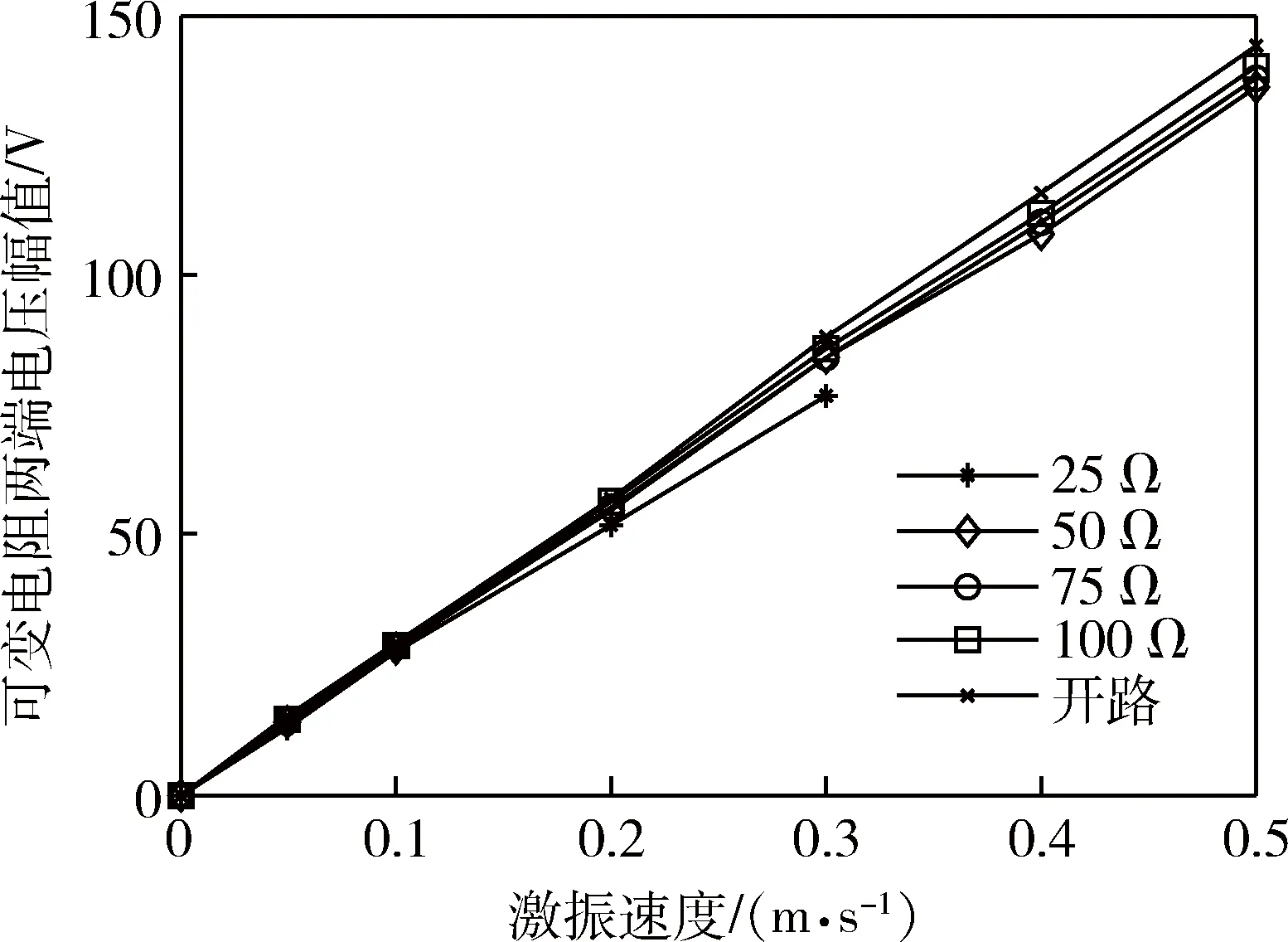
图6 不同外接负载时可变电阻两端电压幅值随激振速度变化曲线
同时,为了方便计算馈能电路在不同外接负载条件下反馈线电压的实际值,可综合式(1)-(3)对电机的反电动势常数进行反向计算,计算方法为

(12)
利用MATLAB对开路条件下反馈线电压幅值随速度变化数据进行一阶多项式拟合,得到曲线的斜率为288.48,代入其他参数值,利用式(12)计算得到Ke=51.37 mV/(r·min-1)。
4.2 阻尼特性试验数据分析
由于试验数据较多,此处仅以外接负载阻值为25 Ω、激振速度为0.2 m/s时的测试为例,其示功图如图7所示。可以看出:激振器在位移为0 mm处达到试验设定速度,在临近正负最大位移处有一较大力值的突变。其原因为:激振台在正负最大位移处换向时,馈能式电磁作动器上下两端的固定装置略微有些松动,从而造成了冲击。
与可变电阻两端电压测试同一原理,对馈能式电磁作动器阻尼力测试数据进行处理,可得到不同外接负载阻值条件下的阻尼特性曲线,如图8所示。可以看出:馈能式电磁作动器阻尼力随激振速度的增大而增大;激振速度相同时,外接负载阻值越大,馈能式电磁作动器阻尼力越小,试验结果与理论分析相符;阻尼力在低速状态时线性度较差,这可能是由馈能式电磁作动器的最大静摩擦力较大造成的。
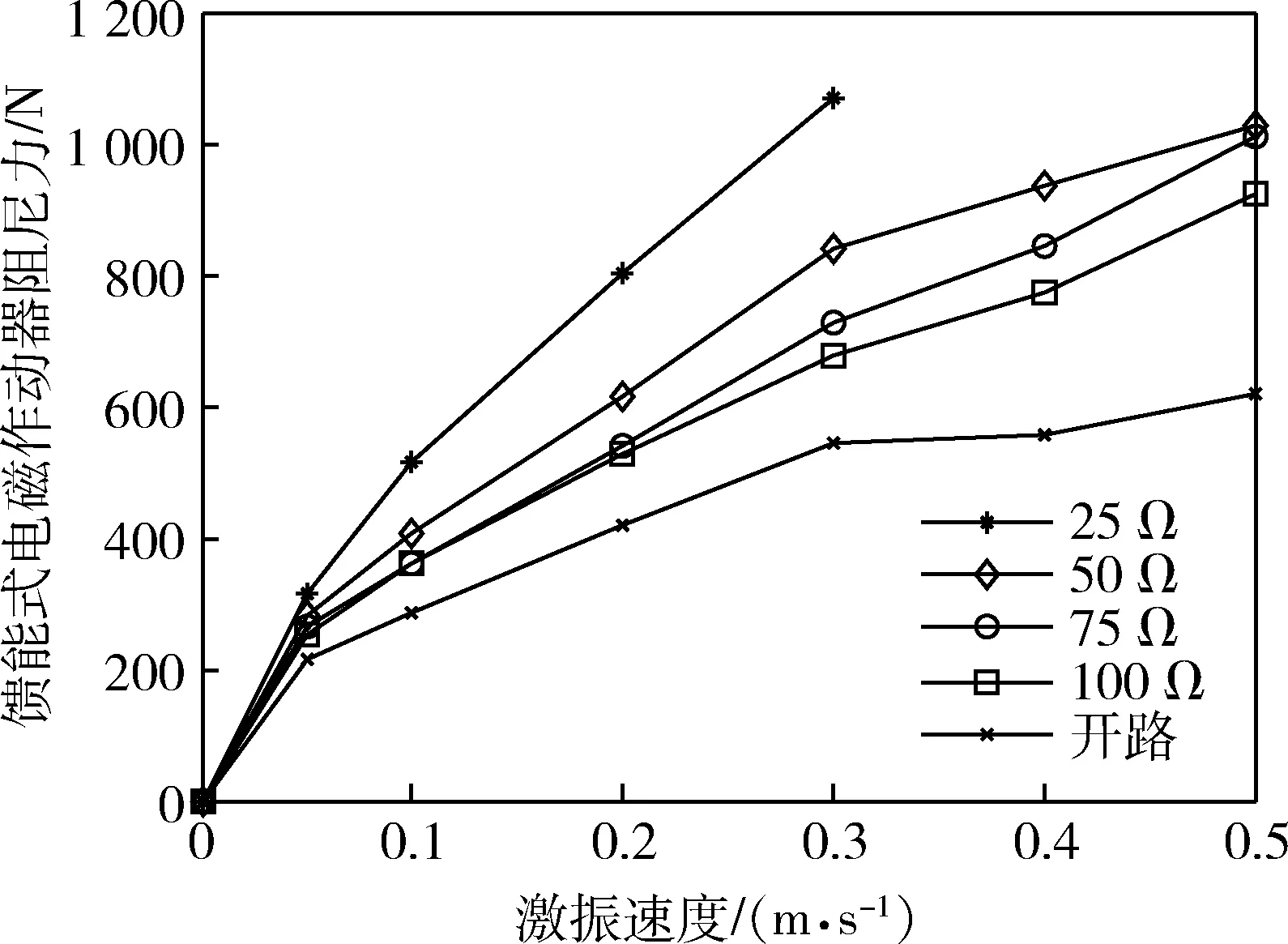
图8 不同外接负载阻值条件下的阻尼特性曲线
利用MATLAB软件对开路时阻尼特性数据进行一阶多项式拟合,可得馈能式电磁作动器的机械阻尼力为
fs=1 123.1v,
(13)
即馈能式电磁作动器的机械阻尼系数cs=1 123.1 N·s/m。
为了在后续的研究中能够对馈能状态下的电磁阻尼力进行较为精确的控制,可综合式(9)-(13)对外接负载阻值为25、50、75、100 Ω时的电机转矩常数Kt进行反向计算,即

(14)

5 结论
笔者设计并研制了一款基于“旋转电机+齿轮齿条”结构的馈能式电磁作动器,阐述了其工作原理,并对其馈能特性和阻尼特性进行了理论分析和台架试验,得到如下结论:
1)馈能式电磁作动器的反馈电压与激振速度和外接负载阻值有关。激振速度越大,反馈电压越高,二者之间呈线性变化;外接负载阻值越大,反馈电压越高,但是当外接阻值远大于电机内阻时,负载阻值变化对反馈电压变化的影响较小。
2)馈能式电磁作动器的阻尼力为机械阻尼力与电磁阻尼力的合力。其机械阻尼系数为一常数;电磁阻尼系数与外接负载阻值有关,外接负载阻值越大,电磁阻尼系数越小,且负载阻值变化可导致电磁阻尼系数的显著变化。
3)“旋转电机+齿轮齿条”结构的馈能式电磁作动器可通过减速机提高电机的反馈电压,便于能量的回收;但目前作动器还存在体积较大、机械阻尼系数相对较大的缺点,需要在后续的研究中进行优化设计。
[1] BART L J G,TOM P J S,JOHANNES J H P,et al.Efficiency of a regenerative direct-drive electromagnetic active suspension[J].IEEE transactions on vehicular technology,2011,60(4):1384-1393.
[2] 来飞,黄超群.采用电磁作动器的车辆主动馈能式电磁作动器的研究[J].汽车工程,2012,34(2):170-174.
[3] KAVIANIPOUR M.Investigation of the passive electromagnetic damper[J].Acta nechanica,2012,223(12):2633-2646.
[4] 王庆年,刘松山,王伟华,等.滚珠丝杠式馈能型减振器的结构设计及参数匹配[J].吉林大学学报(工学版),2012,42(5):1100-1106.
[5] 张勇超,郑雪春,喻凡,等.馈能式电动馈能式电磁作动器的原理与试验研究[J].汽车工程,2008,30(1):48-52.
[6] WEEKS D A,BENO J H,GUENIN A M et al.Electromechanical active suspension demonstration for off-road vehicles[J].SAE technical paper,2000,doi:10.4271-2000-01-0102.
[7] LI Z J,ZUO L,LUHRS G,et al.Electromagnetic energy-harvesting shock absorbers:design,modeling,and road tests[J].IEEE transactions on vehicular technology,2013,62(3):1065-1074.
[8] ANDERSON Z.Gen Shock energy harvesting suspension passes military durability milestone,outperforms specification[EB/OL].(2011-05-26)[2016-09-01].http:∥www.prweb.com/releases/2011/5/prweb8490725.htm.
[9] 彭志召.履带车辆电磁悬挂系统振动控制与能量需求研究[D].北京:装甲兵工程学院,2014.
(责任编辑:尚菲菲)
Research on the Regenerating and Damping Characteristics of Energy-regenerative Electromagnetic Actuator
WANG Xing-ye,ZHANG Jin-qiu,HUANG Da-shan,ZHANG Jian,PENG Zhi-zhao
(Brigade of Equipment Trial and Training,Academy of Armored Force Engineering,Beijing 100072,China))
In order to explore the work performance of the energy-regenerative electromagnetic actuator based on the structure of rotary motor and rack and pinion,it is designed and developed on the basis of analyzing the working principle.Then,the procedure of structure design and parameters calculation is presented,the energy-regenerative and damping characteristics are theoretically analyzed.Finally,a performance test is carried out to verify it.The result indicates that the feedback voltage and the electromagnetic damping coefficient of the energy-regenerative electromagnetic actuator is mainly related to the exci-ting speed and the size of the external load resistance,which lays a solid foundation for the accurate control of the actuator′s damping force and feedback voltage in the subsequent research.
energy-regenerative electromagnetic actuator; rack and pinion; feedback voltage; damping
1672-1497(2017)01-0046-05
2016-10-19
军队科研计划项目
王兴野(1989-),男,博士研究生。
U463.33
A
10.3969/j.issn.1672-1497.2017.01.010
