单次任务中主动清除多块碎片的仿真分析
2017-03-08于锡峥周秀华王荣兰周炳红
于锡峥,周秀华,2,刘 卫,王荣兰,周炳红
(1.中国科学院 国家空间科学中心,北京100190;2.中国科学院大学,北京101408)
单次任务中主动清除多块碎片的仿真分析
于锡峥1,周秀华1,2,刘 卫1,王荣兰1,周炳红1
(1.中国科学院 国家空间科学中心,北京100190;2.中国科学院大学,北京101408)
针对国内外空间活动产生的碎片,文章采用多脉冲推力作用下的轨道机动仿真方法,在主要考虑总速度增量为2km/s的约束条件下,计算碎片清除所需要的速度增量、任务时间以及清除个数。仿真结果表明,单次任务可以清除12块分布比较集中的碎片。研究结果可为我国今后空间碎片清扫任务的设计提供参考依据。
多目标;空间碎片;主动清除;仿真分析
0 引言
太阳同步轨道上分布着许多卫星,包括地球观测卫星、通信卫星、气象卫星等[1],它们与其他物体(如碎片)的撞击速度最高可达15km/s,一旦撞击将会破坏卫星结构甚至使其彻底解体。现在,太阳同步轨道上卫星的密度已经非常高,即使未来不再发射卫星,毁灭式撞击也将成为该轨道上碎片撞击的主要损伤模式[2]。因此,对空间碎片实行主动清除已经刻不容缓[3]。根据多个模型的计算结果,为了保持空间碎片环境的稳定,每年需要主动清除近地轨道上5~10块较大的空间碎片[4-5]。
2012年,德国的 Braun 针对单任务多碎片的清除效率问题进行了研究,给出在总速度增量为2km/s的约束条件下,单次化学推进任务可清理4~5块碎片的结论[6]。而目前国内研究仍然以如何抓捕碎片为主,有关单次任务清除多块碎片的研究还比较少。
碎片清除方法有化学推进、电磁系绳拖曳、激光清除、大气阻力清除等多种方式,其中化学推进方法是目前工程研究中进展最快,近期有望实际应用的方法之一。只要是轨道交会对接式的碎片清除,都需要速度增量和任务时间这2个指标。而我国空间碎片清除对于具体选择哪些碎片,速度增量和任务时间具体需要多少等等这些问题研究得还很少。
本文针对单次化学推进任务清除较多碎片的研究目标,开展多块目标碎片的轨道力学特性分析,规划碎片抓捕次序,设计碎片抓捕轨道。以我国空间活动产生的大碎片作为清除对象,以清除多个目标所需要的总速度增量和总任务时间作为主要约束条件,以单次任务碎片清除的效率为目标,进行仿真研究。
1 目标选择
因高度接近800km的近圆形太阳同步轨道是近地轨道中航天器密度最高的轨道,分布着许多地球观测卫星、通信卫星等,所以本文选择高度接近800km的太阳同步轨道上碰撞概率比较高且轨道倾角接近的碎片作为清除目标[7]。对于轨道倾角比较接近的碎片,实施轨道间转移清除时会节省大量的燃料以及运行时间。但实际上,在地球引力场的作用下,碎片沿升交点赤经分布散乱。本文将升交点赤经作为轨道转移机动的跟踪对象有弊亦有利:弊的地方是此处碎片分布散乱可能带来撞击风险,有利的是在改变捕获器的升交点赤经中会节省燃料。
1.1 碎片摄动分析
对于地球轨道卫星来说,主要的摄动力来自于地球的非同质性。由于地球是个扁球体,它的质量分布是非均匀的,这一物理特性将造成运动物体的摄动加速[8]。下面给出摄动系数J2引起的卫星轨道根数长期变化的公式为[9]
从式(1)可以看出,半长轴、偏心率和轨道倾角在每个轨道周期内的平均变化率为0,基本不受摄动系数J2的影响;升交点赤经、近地点俯仰角和平近点角的变化率是摄动系数J2的线性函数,同时也是半长轴、偏心率、轨道倾角的函数。因此,本文的计算将通过改变轨道半长轴的方式调整捕获器的升交点赤经进动率,使捕获器与碎片的升交点赤经保持一致,最大限度地节省捕获器轨道转移时为提供速度增量所需的能量消耗。
1.2 选择标准
根据北美防空联合司令部(NORAD)发布的两行轨道根数(TLEs)(取自Space-Track网站),挑选出我国空间活动产生的碎片,并记录2015年4月1日之后30天内与我国碎片交会距离小于5km的交会次数,如图1所示。
太阳同步轨道的高度范围为 500~1200km。利用STK模型仿真,可以算出轨道高度为500km的碎片寿命约为8.8 a;652km且轨道倾角98°的碎片寿命约为154 a;800km的约为1074 a;1200km的约为12 750 a。太阳同步轨道上的碎片非常多。图2是我国空间活动产生的碎片的轨道倾角分布,从中可以看出,轨道倾角接近98°的碎片分布数量比其他倾角的高出2个数量级。
基于上述分析,本文将清除目标的选择准则设置为:R(i)=P(i)×V(i),其中,P(i)为30天内与第i块碎片交会距离小于5km的交会次数,V(i)为第i块碎片的体积。
根据上面给出的选择准则,本文从图1的50块碎片中选出排在前17位的碎片进行研究,碎片的基本参数如表1所示(按照升交点赤经由小到大的顺序排列)。它们的轨道分布情况如图3所示。本文中,我们选择从升交点赤经最大的碎片开始清除。因为捕获器捕获目标碎片之后仍处于原轨道上,这时抬高捕获器的轨道高度可以降低升交点赤经的进动速度。等到捕获器的升交点赤经与下一块目标碎片相同时,执行另外一次机动,接近目标。
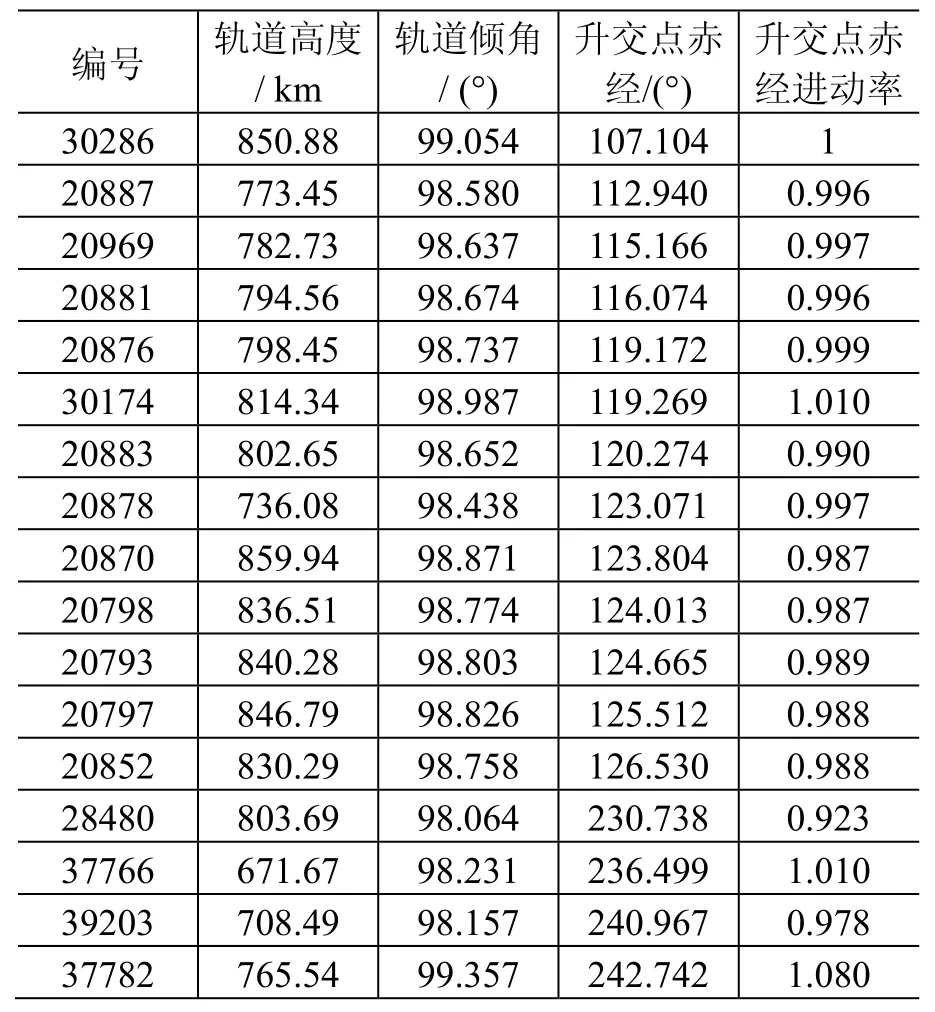
表1 选择碎片的基本参数Table 1 The basic parameters of the selected debris
2 清除方案仿真分析
对于多目标碎片的清除任务,需要在不同的碎片间执行轨道机动。然而由于任务过程中捕获器能够提供的总速度增量(本文的总速度增量为2km/s)有限,我们需要优化清除方案,最大限度地提高单次任务的碎片清除数量。
2.1 清除方案
本文采用化学推进方式抓捕空间碎片的过程如图4所示,具体如下[10]:首先,捕获器与第1块目标碎片交会对接;然后,将携带的推进装置安装到碎片上,提供碎片清除所需的速度增量,将目标碎片送到坠毁轨道上;最后改变轨道形状,利用地球扁率引起的轨道面进动速度的不同,捕获器可以等到 2个轨道的节点线匹配以后再执行对下一块目标碎片的清除任务。
在碎片清除任务中,航天器通过轨道机动与碎片交会,将清除装置安装到碎片上之后,实施下一次轨道转移机动。以编号为20887和30286的碎片为例,通过仿真计算分析在 2块碎片的轨道之间转移时需要的速度增量和任务时间。
式(2)和式(3)分别是捕捉升交点赤经变化率和轨道倾角变化率的计算公式,其中fh是垂直于轨道面的加速度,r是地心距,θ是真近点角。利用上述公式可以计算出改变轨道倾角和升交点赤经需要的速度增量。
霍曼转移是实现 2个圆形轨道之间转移时消耗燃料最少的转移方式。实现共面共轴且近地点位于同侧的2个椭圆轨道之间的转移,当转移轨道与2个轨道均相切时,即从一个轨道的近地点转移到另外一个轨道的远地点或者从一个轨道的远地点转移到另外一个轨道的近地点时,消耗的燃料最少。轨道调相过程将采用椭圆轨道间的霍曼转移实现。2个共面轨道之间的转移如图5所示。
设rp1、ra1、rp2、ra2、rpt、rat分别为轨道1的近地点距离、远地点距离,轨道2的近地点距离、远地点距离以及转移轨道的近地点距离、远地点距离,µ=GM,G是引力常数,M是地球质量。那么,对于图5(a),则有
对于图5(b),则有
捕获器将碎片20887送入坠毁轨道之后,点火机动,抬高自身的轨道高度。降低其升交点赤经进动速率,计算轨道机动所需速度增量,待与30286的升交点赤经一致后,通过轨道机动调整20887轨道倾角,使之与30286的倾角一致,这样就使2块碎片位于同一轨道面,最后通过调相机动使2块碎片交会对接。
表2给出了捕获器从碎片20887所在的轨道转移到 30286所在的轨道需要的速度增量和任务时间。如果轨道高度抬得相对较低,需要的速度增量相对较小,升交点赤经的进动速度变化比较小,利用自然进动等待碎片 30286轨道的节点线与捕获器的节点线匹配的时间就会比较长。反之,如果轨道高度抬得比较高,需要的速度增量相对较大,升交点赤经的进动速度变化比较大,利用自然进动等待碎片 30286轨道的节点线与捕获器的节点线匹配的时间就会比较短。
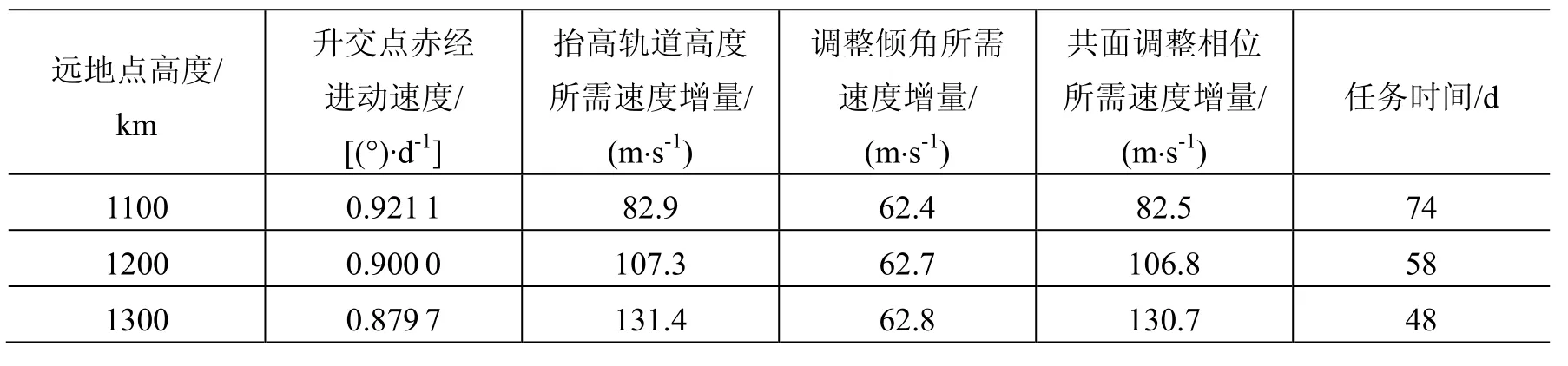
表2 轨道转移时需要的速度增量和任务时间Table 2 The speed increment and task time in the orbit transfer
由于捕获过程都是在轨道面内执行机动,所以,该方案可以节省大量为调整升交点赤经所需要的速度增量。
2.2 单任务多碎片清除
图6给出了单次任务碎片清除需要的速度增量和任务时间。如果限定捕获器能够提供的总速度增量为2km/s,总任务时间为18个月(540 d),则从图6中可以很容易得出1次任务能够清除12块碎片的结论;还可以看出,清理第13块碎片所需要的速度增量大约是清理前12块碎片所需速度增量之和,转移时间也大幅度增加。究其原因,第13块碎片与第 12块碎片的升交点赤经相差过大(约为 104.2°),导致轨道面之间的转移需要大量的速度增量和时间。
分析表明,单次任务清除多块目标碎片在理论上是可行的。为了保护现在或者将来的卫星所在的空间环境不致持续恶化,研究空间碎片的主动式清除技术不可或缺[11]。
3 结论与展望
本文以我国空间活动产生的碎片作为清除目标,采取化学推进方式,以2km/s的总速度增量为约束进行仿真计算,结果表明,单次任务可以清除12块升交点赤经相对比较集中的碎片。
本文采用的化学推进方式的碎片清除方案,相对简单,便于分析;其他方式如电子推进,或许更加节省燃料,有待今后进一步分析研究。可以考虑结合成本以及已经开发的轨道动力学模型,比较不同方案之间的优缺点,以探索更加高效的空间碎片主动清除方式。
(References)
[1]徐建平.国内外气象卫星发展[J].空间科学学报, 2000(增刊1): 17-18 XU J P.The present and future of meteorological satellites[J].Chinese Journal of Space Science, 2000 (sup 1): 17-18
[2]陈金松, 丁宗华, 许正文, 等.利用昆明站大气雷达监测空间碎片的可行性研究[C]//第七届全国空间碎片学术交流会.昆明, 2013: 2
[3]张玉军, 冯书兴.主动式空间碎片清理研究[J].装备指挥技术学院学报, 2010, 21(6): 78-82 ZHANG Y J, FENG S X.Research on active space debris[J].Journal of the Academy of Equipment Command & Technology, 2010, 21(6): 78-82
[4]BONNAL C.Active debris removal: recent progress and current trends[J].Acta Astronautica, 2012, 85(4): 51-60
[5]CASTRONUOVO M M.Active space debris removal: a preliminary mission analysis and design[J].Acta Astronautica, 2011, 69(9/10): 848-859
[6]BRAUN V.Active debris removal of multiple priority targets[J].Advances in Space Research, 2013, 51(9): 1638-1648
[7]刘林, 杨健, 王建华.近地轨道空间碎片清除策略分析[J].装备学院学报, 2013, 24(2): 70-73 LIU L, YANG J, WANG J H.Research on space debris mitigation strategy in LEO[J].Journal of Academy of Equipment, 2013, 24(2): 70-73
[8]CURTIS H D.轨道力学[M].周建华, 徐波, 冯全胜,译.北京: 科学出版社, 2009: 143
[9]SIDI M J.Spacecraft dynamics and control[M].The United States of America: the Press Syndicate of the University of Cambridge, 1997: 46
[10]CERF M.Multiple space debris collecting mission: debris selection and trajectory optimization[J].Journal of Optimization Theory and Applications, 2013, 156(3): 761-796
[11]LIOU J C.An active debris removal parametric study for LEO environment remediation[J].Advances in Space Research, 2011, 47(11): 1865-1876
(编辑:肖福根)
Simulation analysis of active debris removal of multiple targets in a single task
YU Xizheng1, ZHOU Xiuhua1,2, LIU Wei1, WANG Ronglan1, ZHOU Binghong1
(1.National Space Science Center, Chinese Academy of Sciences, Beijing 100190, China; 2.University of Chinese Academy of Sciences, Beijing 101408, China)
In this paper, we adopt the orbit maneuver method for the multiple pulse thrust to calculate the velocity increment and the task time required for the removal of debris produced by domestic space activities, as well as the number of debris removed under the constraint condition of the main consideration of the total velocity increment for 2km/s.It is shown that it is possible to remove 12 pieces of debris with a distribution concentrated within one single mission.The research results of this paper can help our country’s task design of space debris removal in the future.
multiple targets; space debris; active removal; simulation analysis
V439+.4
:A
:1673-1379(2017)01-0015-06
10.3969/j.issn.1673-1379.2017.01.003
于锡峥(1979—),男,硕士学位,副研究员,主要从事飞行器轨道动力学研究;E-mail: yuxizheng@nssc.ac.cn。通信作者:周炳红(1976—),男,博士学位,研究员,方向为一般力学与力学基础研究、飞行器设计;E-mail: bhzhou@nssc.ac.cn。
2016-03-21;
:2017-01-15
于锡峥,周秀华,刘卫,等.单次任务中主动清除多块碎片的仿真分析[J].航天器环境工程, 2017, 34(1): 15-20
YU X Z, ZHOU X H, LIU W, et al.Simulation analysis of active debris removal of multiple targets in a single task[J].Spacecraft Environment Engineering, 2017, 34(1): 15-20
