基于MEMS技术的多媒体空中鼠标
2017-02-27杨智博杨洪勇
于 帅, 赵 玫,2,杨智博, 杨洪勇
(1.鲁东大学 信息与电气工程学院,山东 烟台 264025; 2.哈尔滨工业大学 电气工程及其自动化学院,哈尔滨 150001)
基于MEMS技术的多媒体空中鼠标
于 帅1, 赵 玫1,2,杨智博1, 杨洪勇1
(1.鲁东大学 信息与电气工程学院,山东 烟台 264025; 2.哈尔滨工业大学 电气工程及其自动化学院,哈尔滨 150001)
针对现有空中无线鼠标存在通信距离短、电池供电局限性等问题, 采用通信距离更长的2.4GHz无线传输模块以及可循环充电利用的锂电池对空中无线鼠标系统进行了改进;同时系统接收端采用USB设备通信,将大容量存储设备与鼠标设备整合复用,并实现二者功能的任意切换,从而提高了该鼠标系统适应实际应用环境的能力;本系统采用多传感器信息融合技术,对三轴陀螺仪和三轴加速度计的数据进行实时采集,将采集到的数据传送给STM32微控制器,用于计算鼠标的位移、角度、角速度等参数;利用无线传输模块将数据发送到接收端完成与计算机的通信,控制电脑并完成鼠标的功能,同时USB设备的接收端可免插拔切换为U盘模式;从而实现基于MEMS技术的多媒体空中无线鼠标的智能化和多功能化。
微机电技术;空中鼠标;陀螺仪;加速度传感器;USB设备
0 引言
自鼠标诞生以来以其快捷、准确、直观的屏幕定位和控制能力,方便了用户与计算机系统之间的交互,极大地增强了系统的功能。受制于鼠标的工作原理,在使用场合以及适用范围上有着很大的局限性,使鼠标很难脱离载体而独立工作。随着技术的进步,时下鼠标的种类愈来愈多,并且越来越多的跨界功能融入鼠标,使得鼠标的功能更加多样化。文献[1]设计了一种基于光学鼠标传感器的转速测量的鼠标,它能准确判别转向并且在1 000 r/min范围内具有良好的线性度和快速响应性。文献[2]的鼠标系统融合了AD 公司的ADXL203MEMS微加速度计和无线射频技术,使该鼠标系统能达到比传统鼠标更高的控制精度、更高的 DPI,实现无按键的操作。同时针对鼠标在 PC 机屏幕上移动是在平面上的特点开发出一种利用三向加速度传感器 MMA7455L 作为移动信号采集的鼠标,可以真正的实现鼠标由平面转向三维空间的自由操作[3]。文献[3]使用 MMA7455L 加速度传感器代替传统光电传感器作为鼠标移动信息的采集源,通过移动补偿算法,减少了三维空间移动路径转化为平面移动的误差,实现鼠标的功能。文献[4]针对许多应用场合如床上、长途汽车座位上没有桌面存在,传统的光电鼠标就不方便应用的问题。提出一种基于微机电系统惯性传感器的鼠标设计方法。
本文是根据空中定位以及MEMS (micro-electro-mechanical systems)技术的原理,采用多传感器信息融合技术设计一款具有智能化和多功能化的多媒体无线空中鼠标。本系统利用STM32处理器对加速度计以及陀螺仪的数据进行采集,并将采集后的数据利用RF射频器发送到系统的接收端,再通过USB接口实现与电脑端实行通信,进而实现鼠标的各种功能。系统具有良好的容错能力以及适应实际应用环境的能力,同时采用了可循环充电技术,具有良好的快捷充电,节能环保的优势,此外,本系统通过将存储设备与鼠标设备整合复用,因此对于教师、职员、以及各种需要公开演讲的人群来说,可以将文件方便快捷的存入到鼠标的接收端,便于保存管理。
1 多媒体空中鼠标系统整体设计方案
本文利用发射端和接收端的协同工作共同实现多媒体空中鼠标的功能。发射模块集成在手持端,由使用者控制。接收模块用来连接电脑或手机等设备。
空中鼠标系统主控制无线发射模块主要由姿态传感器、STM32微控制器、无线传输模块、电池充电管理单元以及激光灯组构成。首先MEMS传感器通过感知使用者的动作来检测加速度以及角速度等参数,解算出获得鼠标姿态所必须的四元数以及欧拉角,与此同时获得发射模块按键信息。然后,利用无线传输完成发射端与接收端的通信功能,最后接收端将接收到的数据以报告描述符的形式发送给USB主机。
空中鼠标系统接收模块主要由基于Cortex-M3内核的STM32微控制器、SD卡驱动电路、NRF24L01射频模块构成。当接收端切换为存储模式时,SD卡用来作为存储介质。接收模块的主要完成的工作是将发射端发来的数据通过USB总线发送给PC,而完成对PC设备端的远距离控制。同时USB 口既可以为充电式电池充电,也能供电给电源管理芯片。系统主要工作原理框图如图1所示。
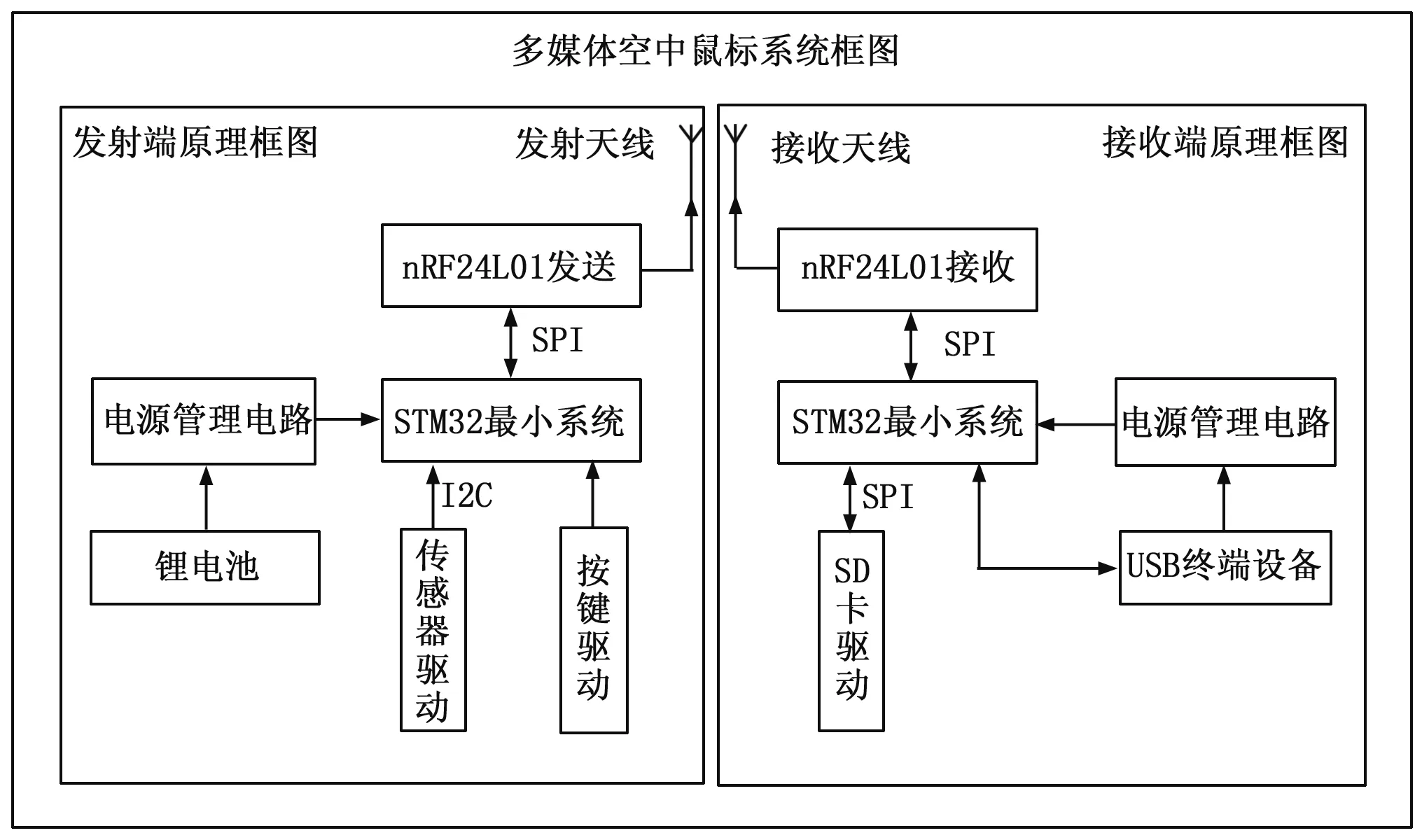
图1 多媒体空中鼠标系统工作原理框图
1.1 无线传输方式选择
本文采用Nordic 公司的 nRF24L01 射频收发芯片来实现鼠标位移和控制信息的无线通信。NRF24L01[5]是一款工作在2.4~2.5 G 的 ISM 频段的单片无线收发器芯片[5],集成度高而且价格比较低,包括频率发生器、增强型 Shock-Burst 模式控制器、功率放大器、晶体振荡器、调制器和解调器。NRF24L01具有低功耗、低工作电压、抗干扰性强、稳定性高等特性。此外,它内置的多点通信控制可以为系统提供很大的扩展的空间,是一款应用比较广泛的无线通讯芯片,比较适合应用于游戏控制器、无线收音、计算机外设等设备。
1.2 微控制器选择
本文采用由意法半导体 (ST)公司生产的Cortex_M3 STM32作为系统核心处理器。系统在发送端采用STM32F030C8T6处理器,原因是它能够满足本文对较低的功耗、较快的处理速度以及低调试成本等要求;同时其具有便捷的开发环境、极高的性价比及功能性等特点。系统在接收端采用的是STM32F103C8T6处理器,主要面向低端以及低功耗应用,它同STM32F103C8T6处理器一样具有相似的特点,是作为替换8/16位MCU的最佳选择。
1.3 USB系统工作模式
一方面本文使用Micro SD卡与USB功能相结合来设计模拟U盘。另一方面,利用USB的人机接口功能完成鼠标设备的基本功能。USB系统是由主机Host以及从机Device (设备) 组成的一种主从的结构系统。一般的主机通常由单个或者几个USB主控制器以及根集线器(Root Hub)构成。数据处理是USB主控制器的首要任务,连接主控制器和设备的任务则由根集线器来完成,他们之间的接口和通路也有根集线器来完成。
2 多媒体无线空中鼠标系统的硬件设计
2.1 电源管理电路
本文的手持发射端选用可充电锂电池供电,采用Micro-USB标准接口充电,放电电压区间是3.3~3.7 V。系统采用的充电管理芯片为TP4056,是一款恒流/恒压线性充电管理芯片,同时还具有温度检测功能,防止充电温度过高,具有充电指示和充电结束两种LED状态指示。
锂电池充满电时电压高达4.2 V,而CPU供电为3.3 V左右,因此需要通过稳压芯片将电压稳定在3.3 V附近。在本文中发射端选取的稳压芯片同接收端一样,同为SPX3819。该芯片具有电压输出噪声较低以及低压差特性,比较适合本文所用的充电电池情况。充电管理单元电路及稳压电路如图2和3所示。
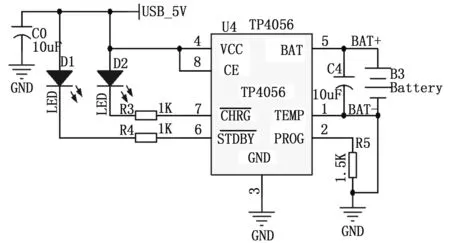
图2 充电管理单元电路
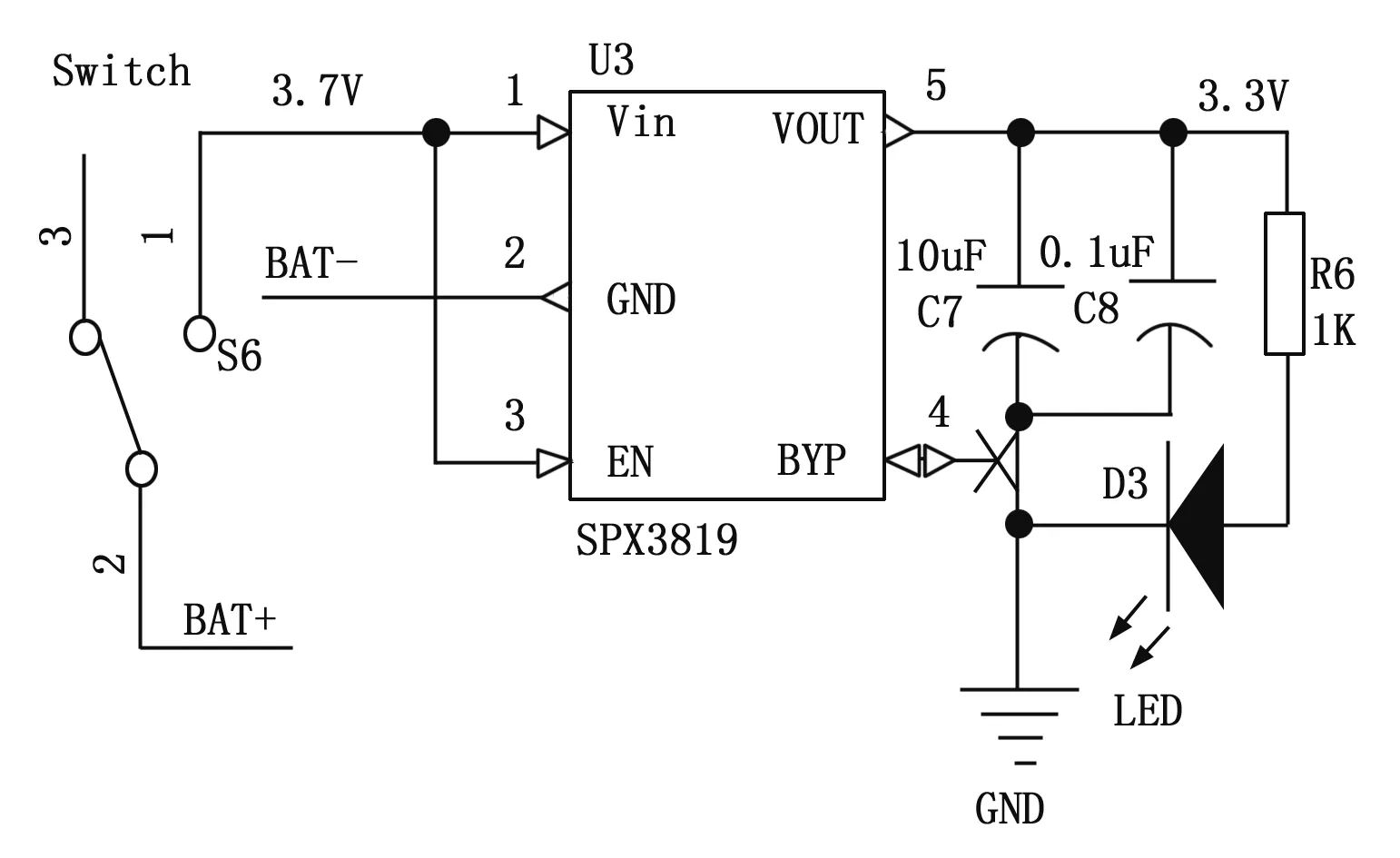
图3 稳压电路
2.2 晶振与滤波电路
晶振电路的作用在于向CPU以及其它电路提供工作时钟。在电源和地之间的电容为去耦电容,去耦电容起到去除噪声和蓄能的功能。
和去耦电容位置不同的电容被称为旁路电容,它们都能降低电路的干扰。在相同的电路中:旁路电容的主要作用是滤除输入信号带来的高频噪声,而去耦电容的主要作用是滤除输出信号中的干扰信号。晶振与滤波电路如图4所示。
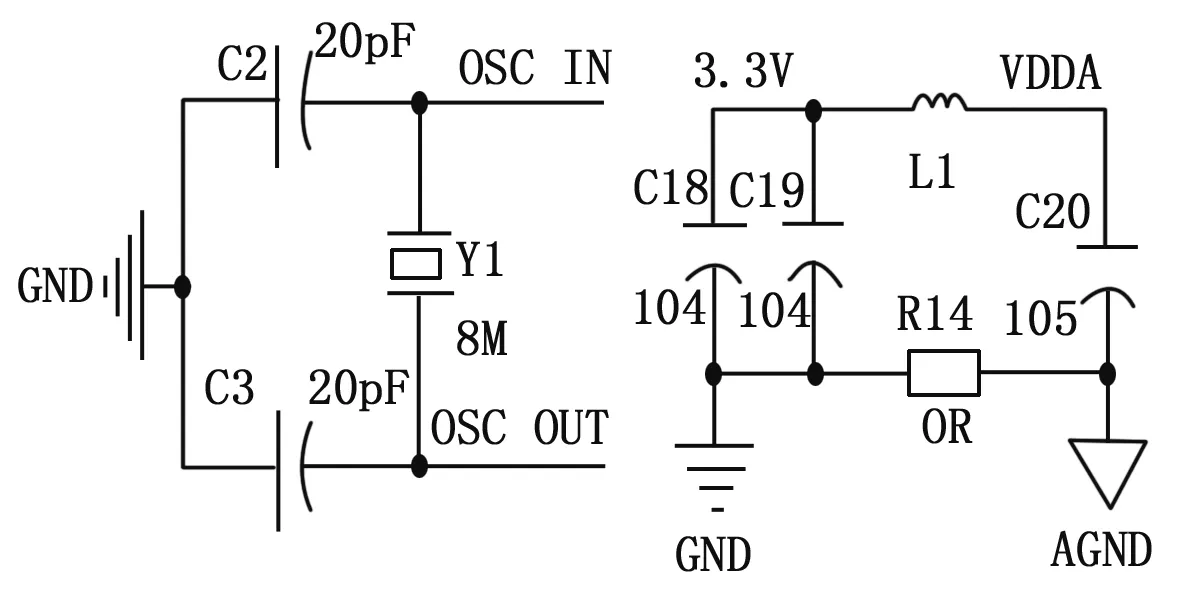
图4 晶振与滤波电路
2.3 MEMS传感器电路
微机电系统主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,而且融合了多种微细加工技术[6]。MEMS主要利用微型陀螺仪以及加速仪工作,能够感知运动的速度与方向。由于加速度传感器不能实现对载体运动的快速跟踪,导致加速度传感器在较短时间内容易产生波动,本文在鼠标设计中将加速度传感器作为辅助传感器用来校正陀螺仪积分产生的偏差[6-10]。
同时MPU6050分别能检测三轴加速度以及角速度,该传感器数据采集精度高且功耗合理 (工作电流为6 mA,休眠模式下为25 μA)。MPU6050整合了三轴陀螺仪和三轴线加速度计,避免了加速度计和陀螺仪组合时的轴间差问题,并且减小了包装空间;并能够以400 kHz 的速度提供 16 位精度的加速度数据。因此本文选用MPU6050模块,保证了数据的可靠性。同时采用最高速度为400 kHz的I2C接口在设备内部的寄存器之间进行通信,MPU-6050芯片内部加速度计和陀螺仪的输出精度为3个16位可调ADC输出,并将输出的模拟量转换为单片机采样需要的数字量。MPU6050具备I2C通信接口,其外围电路如图5所示。
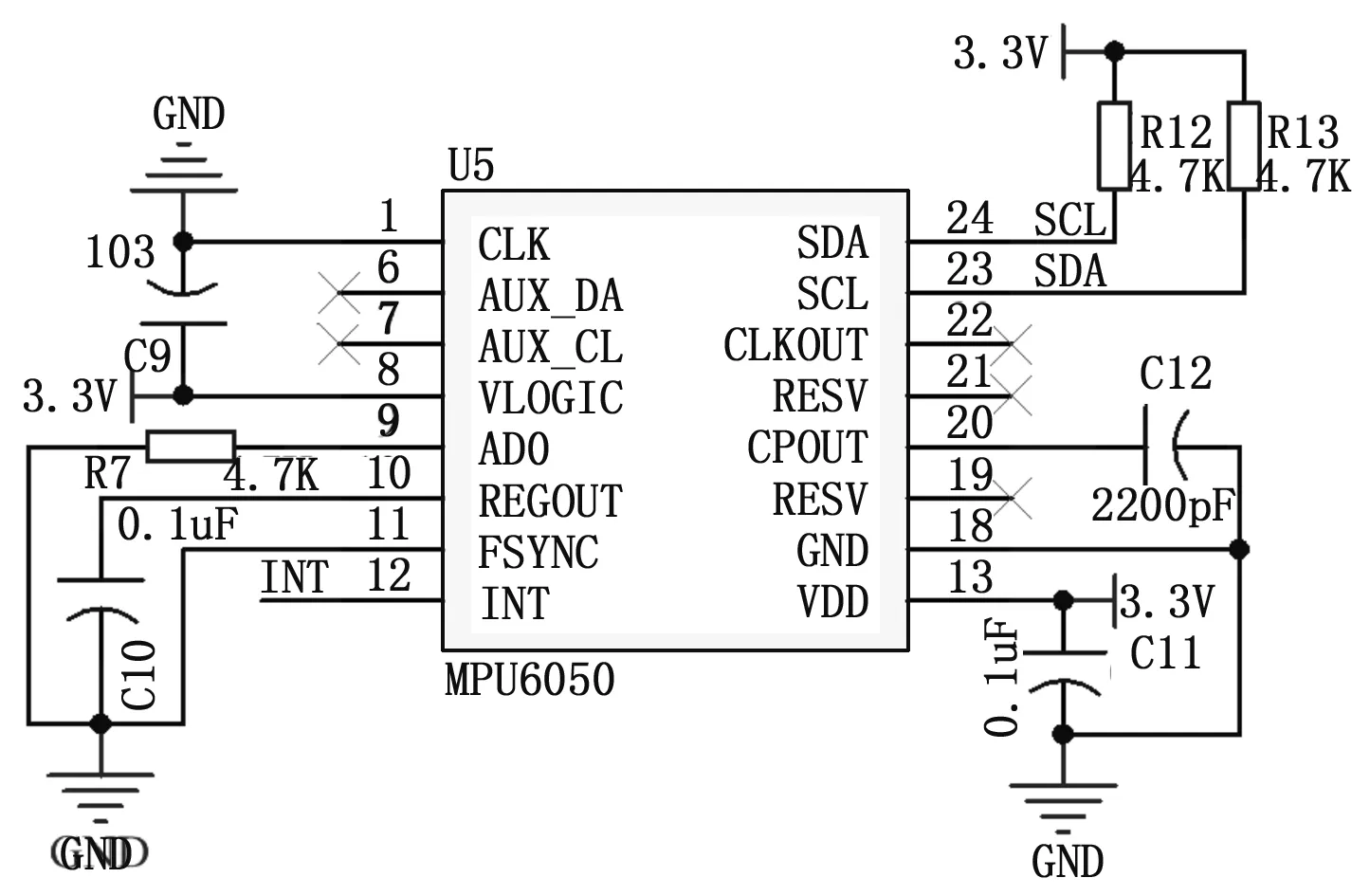
图5 MPU6050模块电路
2.4 2.4 G无线接口电路
NRF24L01 是通过 SPI 串口来实现全部的 30 字节配置字的配置任务。NRF24L01与MCU的通信可通过IO软件模拟SPI的方法或者硬件SPI接口两种方式实现。IO口软件模拟的方式可方便器件与各种MCU进行通信,节省MCU的硬件资源。其原理图如图6所示。
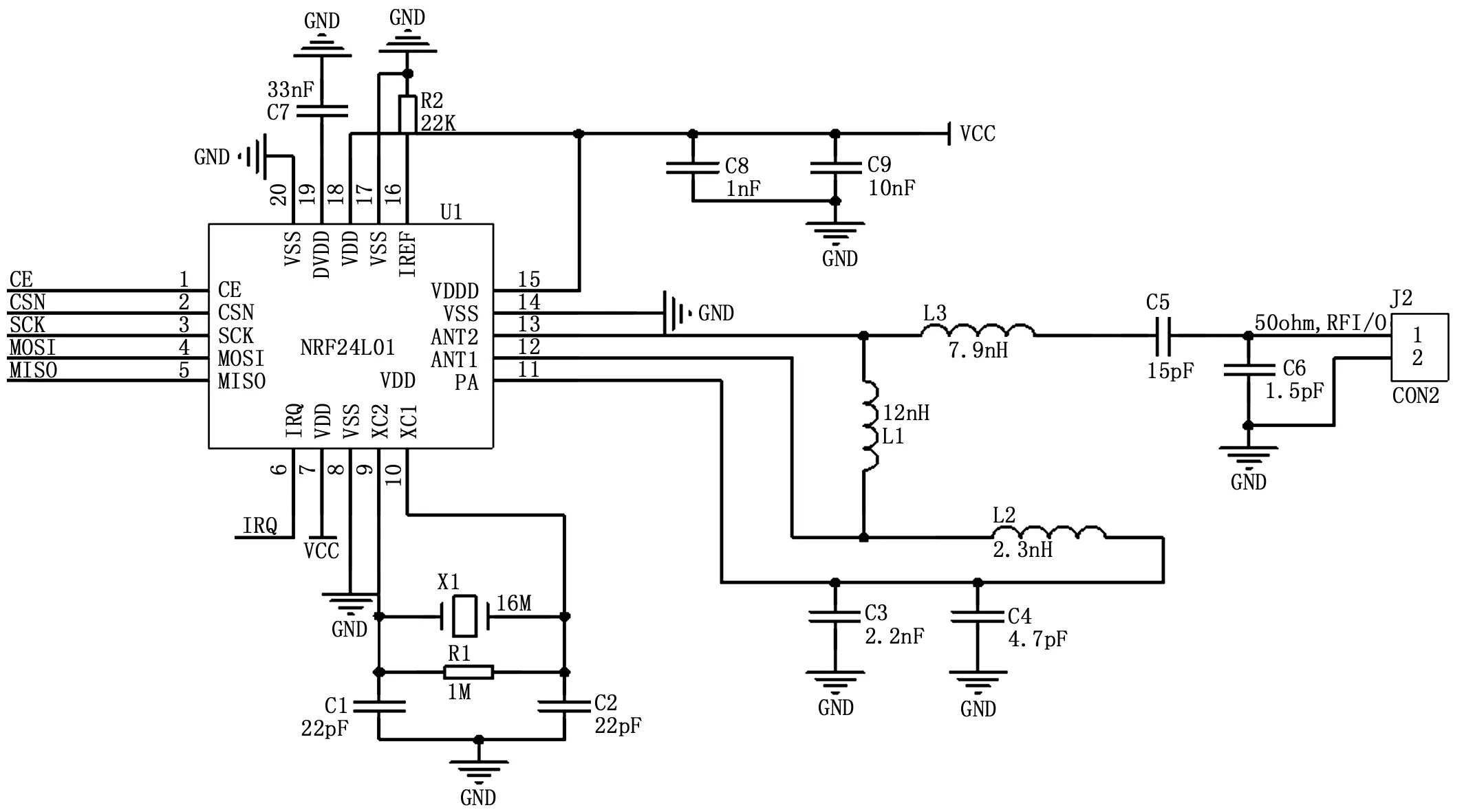
图6 NRF24L01通信模块电路
2.5 接收端系统硬件原理图设计
电脑USB端口通过检测D+或者D-是否被拉高来判断是否有USB设备插入。上拉电阻是接在D+上时对应的是全速以及高速设备,接在D-上时对应的为低速设备。另外NPN型三极管Q1作为上拉电阻的开关,在程序中通过对三极管的控制可以实现软插拔的功能。USB接口电路如图7所示。
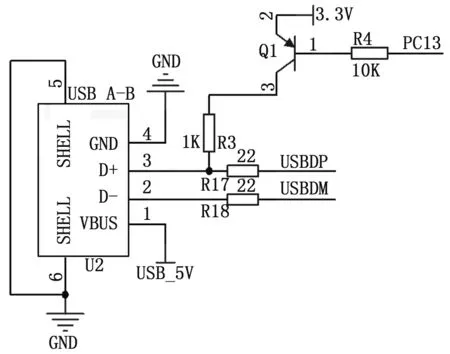
图7 USB接口电路
SPI模式下需要注意SD卡的电平匹配问题,工作电压为5 V的单片机需要通过三极管或其它方法进行电平匹配或者采用串电阻限流的方法。SD卡接口电路如图8所示。
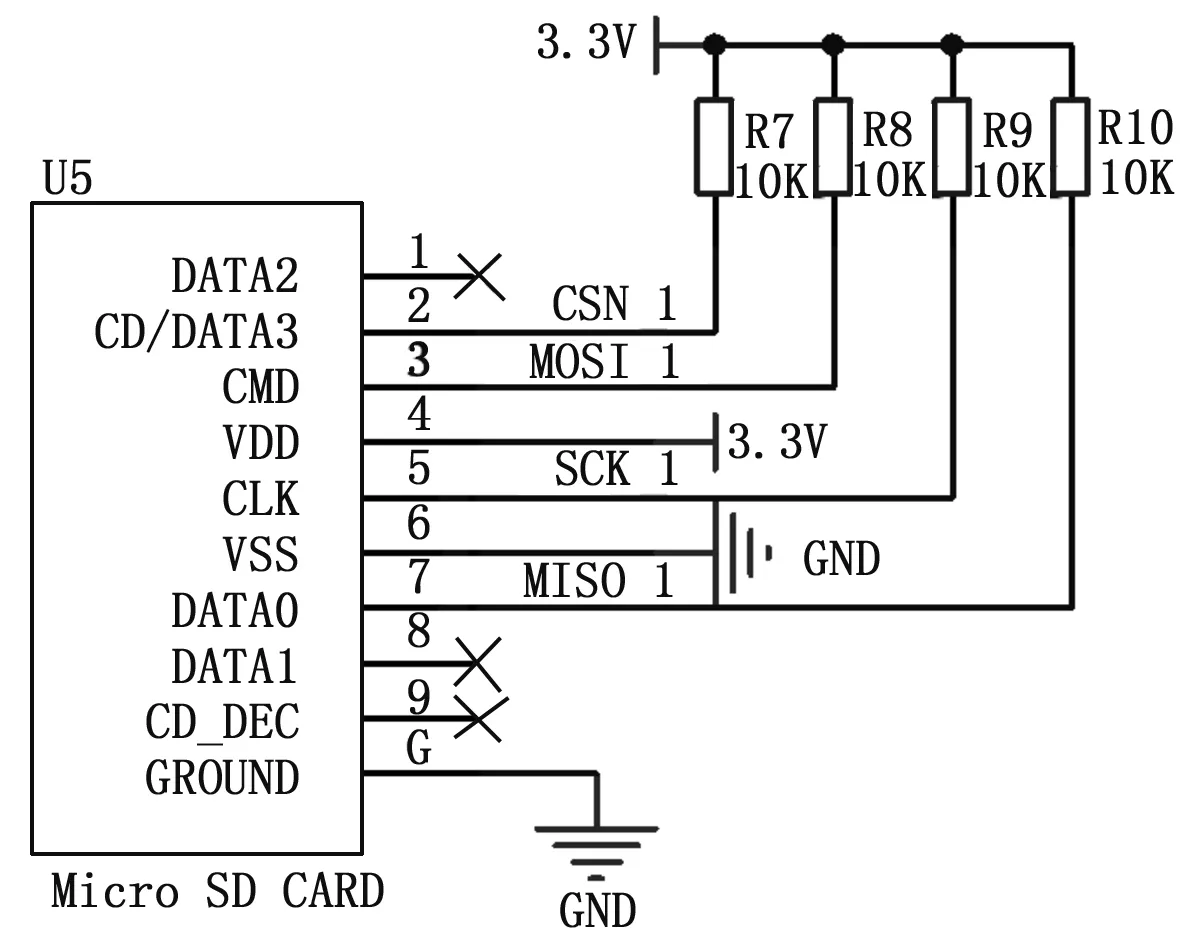
图8 SD卡接口电路
3 多媒体无线空中鼠标系统的软件设计
3.1 发射端系统软件设计
在发射端的软件系统设计中,主要用到了姿态解算、按键处理、数据发送等任务调度与任务间的通讯功能。首先,给微控制器上电复位以后,需立即对外设进行初始化。其次,数据通过发射端设备的自检系统检测,若通过,则进行下一步的任务, 即系统进行数据发送、按键处理以及鼠标系统的姿态解算等任务的处理。否则,系统将再次检测数据直到通过为止。最后,系统进行数据发送、按键处理以及鼠标系统的姿态解算等任务的处理。发射端鼠标动作任务调度和通讯处理的流程如图9所示。
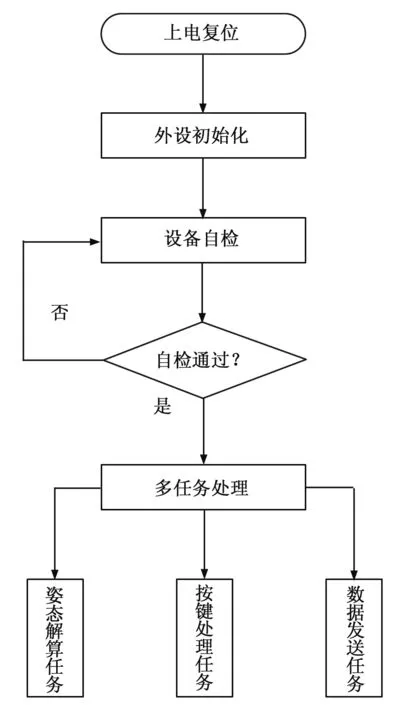
图9 发射端流程图
3.2 接收端系统软件设计
多媒体空中鼠标的接收端是整个程序最基础的部分,涉及到任务之间以及USB功能之间的切换。因此首先要实现对USB HID设备类的程序设计(即先完成USB作为鼠标接收端的功能);其次要完成SPI对SD卡的驱动,在文件系统下能实现对SD卡的正常读写功能接收端的程序设计;最后,在实现以上功能的基础上完成USB大容量存数程序的移植,并能够实现带电状态下的动态切换。完成上述过程就初步实现了鼠标功能和U盘存储功能。与发送端采用了相同的结构与任务调度方法。接收端流程图如图10所示。
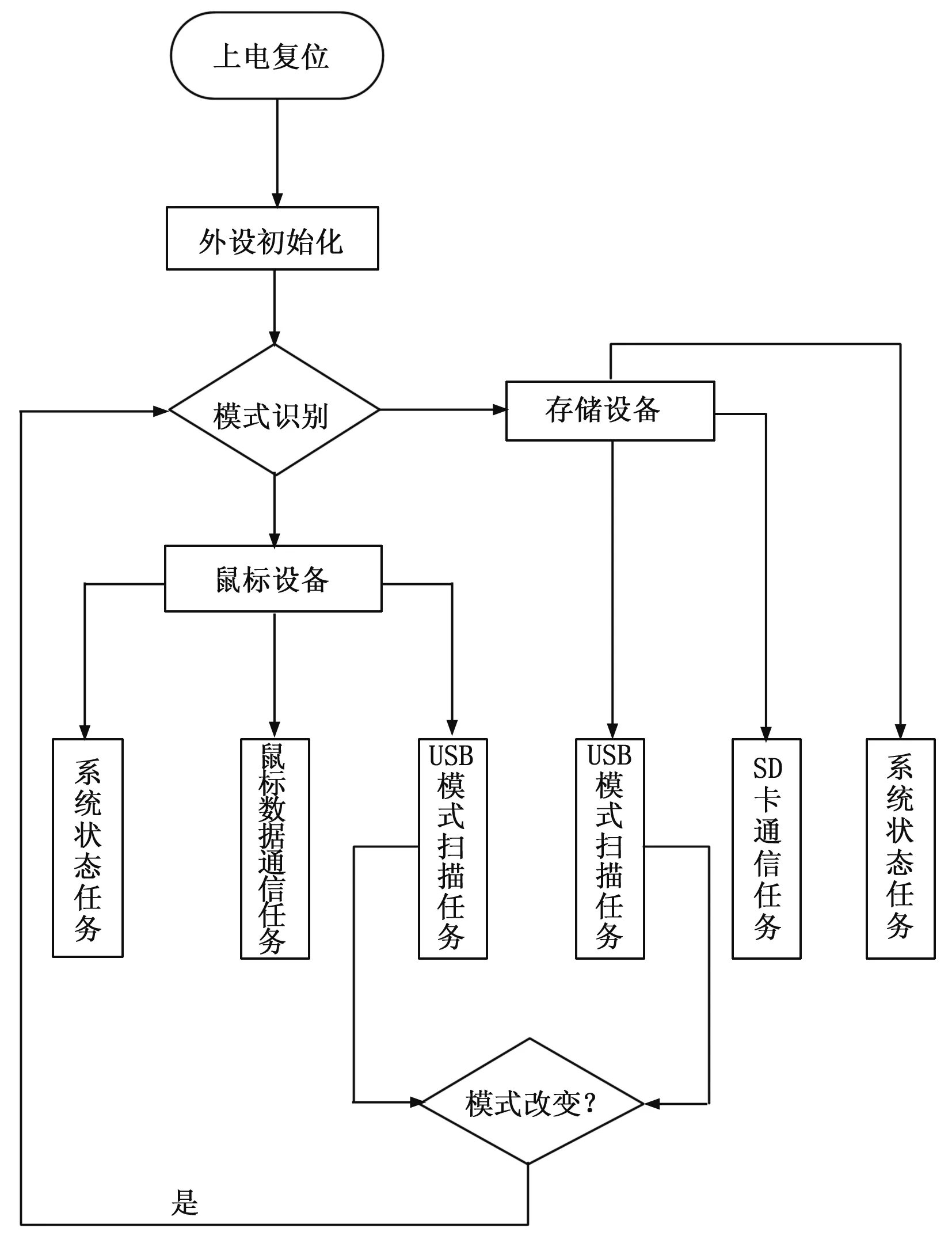
图10 接收端流程图
4 多媒体无线空中鼠标系统
4.1 多媒体无线空中鼠标系统实物平台
通过对多媒体空中鼠标系统发射端和接收端的硬件、软件设计以及在MDK开发环境下调试,得到了本文所设计的多媒体空中鼠标的实物图,如图11所示。
4.2 发射端姿态读取及计算实验验证
鼠标发射端姿态传感器MPU6050集成三轴加速度计与三轴陀螺仪。每个陀螺仪各自负责检测相应轴的转动速度,也就是检测围绕各个轴转动的角速度。为校正角速度积分产生的误差提高精确度,本文将加速度计作为鼠标平台的一个观测量用来辅助校正陀螺仪。角速度经过预处理之后就能得到较高响应度的鼠标偏转角即翻滚角、俯仰角、偏航角。可以看出,鼠标具有较高的灵敏度。鼠标工作过程中对角度的响应如图12所示。


图11 多媒体无线空中鼠标系统实物图
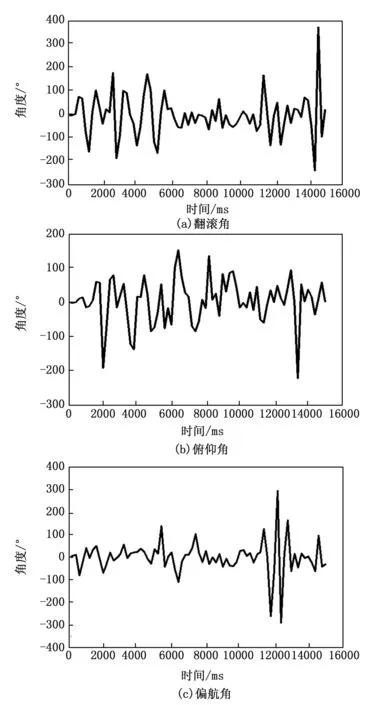
图12 工作中的鼠标角度响应
5 结论
本文首先给出了无线空中鼠标系统的整体设计方案,主要包含鼠标的接收端和发射端两方面的设计以及无线传输模式、微控制器等选择。其次是系统硬件的设计,主要包括接收端电源管理电路、晶振与滤波电路、MEMS传感器电路、2.4 G无线接口等电路。再次给出了系统软件的实现过程,包括计算系统状态、实现数据通信、完成USB和SD卡扫描等任务。最后通过发射端姿态读取及计算实验验证该系统具有较高的灵敏度,可以较好的实现鼠标系统的功能。实验证明,本文所设计的空中无线鼠标对现在的工作环境具有很广的适应性,并且更加灵敏和环保,相信对未来无线空中鼠标的发展具有一定的借鉴意义。
[1] 刘冬冬,姜炜,张天宏.基于光学鼠标传感器的转速测量方法研究[J].传感器与微系统,2008,27(9):21-26.
[2] 汤 坚,陈文元,姜晓波,等.基于微加速度计的鼠标系统[J].计算机工程设计,2008, 29(23): 6136-6138.
[3] 王 鹏,黄 冰,陈 婷.基于 MMA7455L 加速度鼠标的研究[J] 传感技术学报,2010,23(7):1044-1047.
[4] 陈建新,臧 晶,杨璐璐.基于MEMS传感器的三维鼠计与实现[J].计算机工程,2012,38(24):274-278.
[5] 陈丽娟,常丹华.基于nRF2401芯片的无线数据通信[J]. 电子器件,2006,29(1):248-250.
[6] 王淑华. MEMS传感器现状及应用[J].微纳电子技术, 2011, 48 (8): 516-521.
[7] 田亮亮,臧家伟,王国发.基于MEMS的无线触控鼠标的电路设计[J].机电产品开发与创新,2011,24(4):30-31.
[8] 段建雷,韩 鹏,樊爱军,等.基于手机惯性传感器空中优化与实现[J].计算机应用与软件,2015,32(12):226-230.
[9] 江朝强,石 睿,王云飞.基于MEMS 指环式低功耗无线三维鼠标的设计[J].仪器仪表装置,2013,28(9):12-14.
[10] 刘 宇,鞠文斌,刘羽熙. MEMS 加速度传感器计量检测技术的研究进展[J]. 计测技术,2010,30(4):5-8.
[11] 张家田,许 凯,严正国.基于空中运动/手势控制接口的空中鼠标设计[J].现代电子技术, 2016,39(6):143-146.
[12] 郑建利,高 锋,张崇军,等.基于GPRS的可配戴生理信息无线监测系统设计[J].郑州轻工业学院学报,2015,30(5/6):138-141.
[13] 杨 伟,肖义平.基于STM32F103C8T6 单片机的 LCD 显示系统设计[J].微型机与应用,2014,33(20):29-34.
[14] 赖义汉,王 凯.基于 MPU6050 的双轮平衡车控制系统设计[J].河南工程学院学报(自然科学版),2014,26(1):53-57.
Multimedia Air Mouse Based on MEMS Technology
Yu Shuai1, Zhao Mei1,2, Yang Zhibo1, Yang Hongyong1
(1.School of Information and Electrical Engineering, Ludong University, Yantai 264025, China; 2.Department of Electrical Engineering and Automation, Harbin Institute of Technology, Harbin 150001, China)
The air wireless mouse system adopted much longer communication distance 2.4 GHz wireless transmission module and a rechargeable lithium battery is improved, in order to solve the existing problem of wireless air mouse, such as the shorter communication distance, the limitations of battery-powered and so on. It is well-adapted to the practical application environments that the receiver through the USB protocol can be reused as the massive storage device.The air wireless mouse system is adopted multi-sensor data fusion technology. Firstly, the real-time collected data through the three axis gyro and three axis accelerometer is transmitted to the STM32 microcontroller, used to calculate the mouse displacement, angle, angular velocity and other parameters. These datas will be sent to the receiver by wireless transmission module to achieve communication with the computer, which is controlled to perform the function of the mouse, the receiver of the USB device can be switched to plug-free U disk mode. The multimedia wireless air mouse achieve an intelligent and multi-functional task based on MEMS technology.
MEMS technology; air mouse; gyroscope; acceleration sensor;USB devices
2016-06-11;
2016-09-13。
国家自然科学基金资助项目(61273152,61304052;51407088);2015年地方高校国家级大学生创新创业训练计划项目(201510451088)。
于 帅(1995-),男,硕士研究生,主要从事智能控制,嵌入式系统方向的研究。
杨洪勇(1967-),男,教授,博士,主要从事多智能体编队控制方向的研究。
1671-4598(2017)01-0114-05DOI:10.16526/j.cnki.11-4762/tp
TP
A
