单轮电机失效时四轮轮毂电动汽车各驱动模式转向特性研究
2017-02-27黄国庆
陈 锐,孙 鹤,黄国庆
(中国人民解放军第一航空学院 航空电子工程系,河南 信阳 464000)
单轮电机失效时四轮轮毂电动汽车各驱动模式转向特性研究
陈 锐,孙 鹤,黄国庆
(中国人民解放军第一航空学院 航空电子工程系,河南 信阳 464000)
文章在对轮胎侧偏特性和轮胎力研究的基础上,提出了四轮轮毂电动汽车四种驱动模式的转向力矩分配问题;通过数学分析,将此问题转化为一个有约束条件的最优化求解问题,接着使用MATLAB优化工具箱,并采用有效集算法对此优化问题进行求解,最终解决了单轮电机失效时四种驱动模式的选择问题,为改善单轮电机失效时四轮轮毂电动汽车的转向特性,防止车辆侧滑失稳提供了理论依据;最后采用汽车动力学仿真软件TESIS DYNAware对所提理论的正确性进行了仿真验证。
四轮轮毂电动汽车;力矩分配;单轮电机失效;驱动模式
0 引言
本文所研究的对象是四轮轮毂电动汽车,与传统内燃机汽车相比,四轮轮毂电动汽车具有更多的可控自由度,成为研究新一代车辆控制技术的重要研究方向以及探索车辆最优动力学性能的理想载体[1]。相比一般电动汽车单电机驱动方式,四轮轮毂电动汽车4个驱动轮可以单独控制,所以可以通过直接横摆力矩来控制汽车的侧向动态性能[2]。
虽然四轮轮毂电动汽车与传统电动汽车相比具有广泛的应用和发展前景[3]。但是,当四轮轮毂电动汽车的电驱动系统(包括电机及相关部件)失效时,故障电机将无法输出驱动转矩,这势必会导致车身出现失稳状况。对单轮电机失效情况,四轮轮毂电动车依然可以通过控制正常电机使车辆继续行驶,这也是该车型的主要优势之一[4]。所以,根据失效情况,可以将四轮轮毂电动车的四轮驱动模式相应的转换为前轮驱动模式、对角驱动模式(两种)、后轮驱动模式。本文的重点就是讨论单轮电机失效时,汽车采用这几种驱动模式时的驱动特性[5]。
1 模型分析
1.1 轮胎侧偏角和侧向力的关系
汽车的侧向运动会产生轮胎侧滑,有关轮胎侧滑产生侧向力的分析中,Fiala所提出的数学模型被广为接受[6],根据Fiala理论,可得到轮胎侧偏角与侧向力的基本关系如下式所示:
(1)
(2)
式中,l为轮胎接地区长度,β为轮胎的侧偏角,μ为地面与轮胎胎面之间的摩擦系数,Pm为载荷产生的接地区接地压力最大值,b为轮胎接地区的宽度,k为单位长度弹性基础的弹簧常数。
1.2 轮胎侧向力一般特性
根据Fiala理论,当侧偏角较小时,它与侧向力几乎呈线性关系[7]。当侧偏角超过某一值后,侧向力的增加变得缓慢,如图1所示。
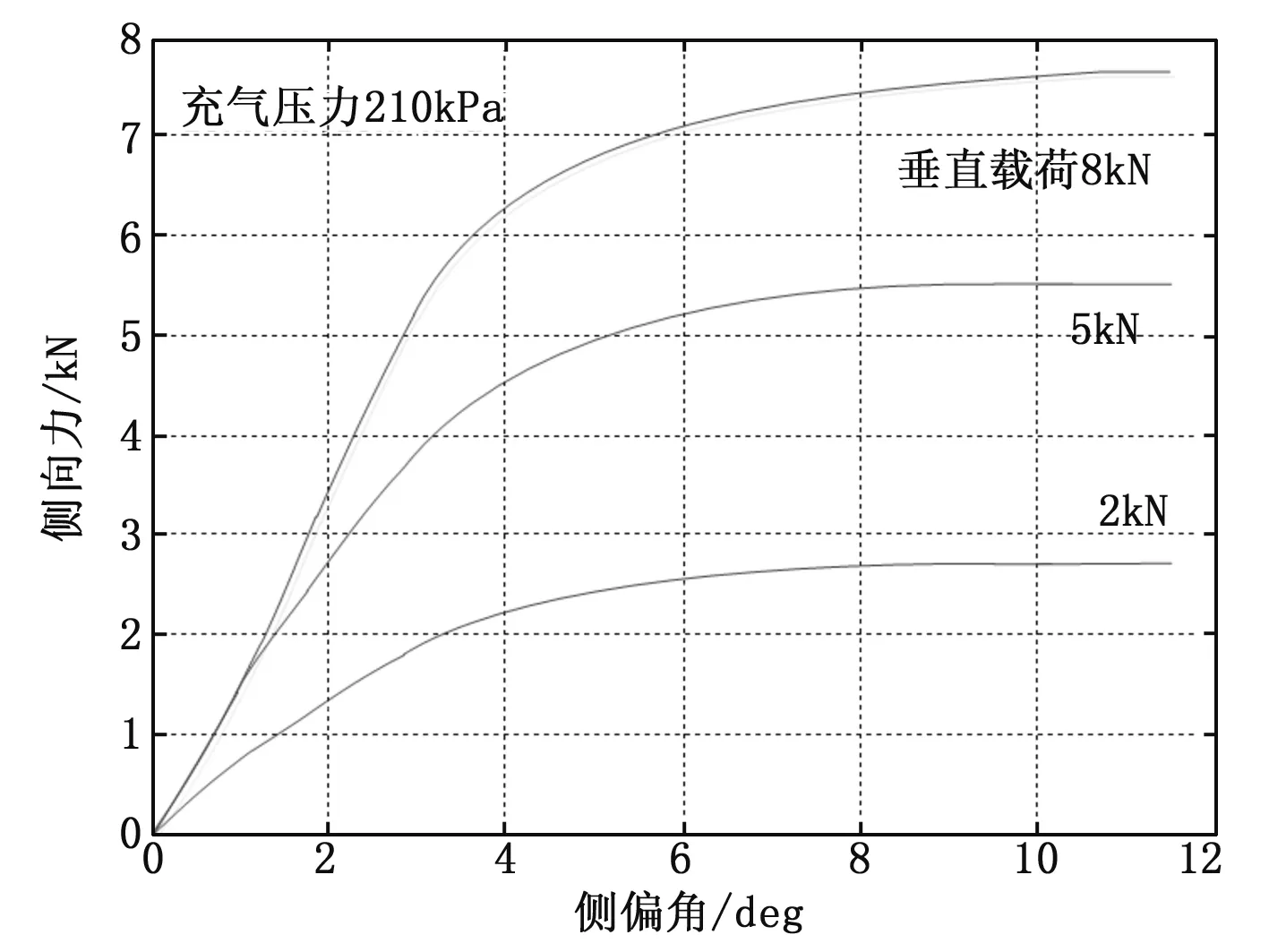
图1 轮胎侧向力与侧偏角的关系
侧向力达到附着力时轮胎将发生整体侧滑,即轮胎侧向力在侧偏角tanβ=3uW/K时达到最大值Fmax=uW。
1.3 轮胎制动力对轮胎侧向力的影响
使轮胎制动的纵向力也会影响轮胎侧向力的大小,基于摩擦定律,轮胎与地面之间存在最大附着力uW,以此为半径做圆,称为摩擦圆[8]。轮胎的侧向力和纵向力分布在该圆两互相垂直的轴上,均不能超出该范围。如图2所示。

图2 摩擦圆
设路面附着系数为u,根据图2可知在极限情况下(即在摩擦圆上),轮胎制动力Fx与侧向力Fy的关系可以表示为:
(3)
式中,W是轮胎垂直载荷。
假设不论侧偏角如何,即在任何值时由轮胎制动力引起的侧向力的下降率是相同的,则有下式成立:
(4)
或者:
(5)
表明对给定的侧偏角而言,侧向力Fy与驱动制动力Fx的关系曲线为一椭圆。在侧向力取最大值所对应的侧偏角处,该椭圆与之前所示的摩擦圆一致。
图3为一个实际测量的例子,采用的整车质量为1 296 kg,地面摩擦系数为0.5,则不同轮胎侧偏角下制动力和侧向力关系如下[9]。
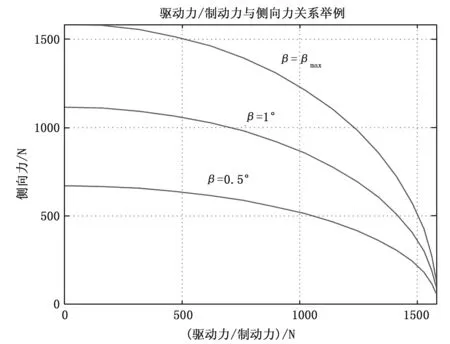
图3 驱动力/制动力与侧向力关系示例
1.4 轮胎力分析
车轮纵向力和侧向力产生的横摆力矩对转向有不同的影响,有的产生有利转向的横摆力矩MYAW,有的产生阻止转向的横摆力矩MANTI-YAW[10]。以左转工况为例,其余工况类似,各车轮力如图4所示,图中白色箭头表示有助转向的力;图中黑色箭头表示阻止转向的力。
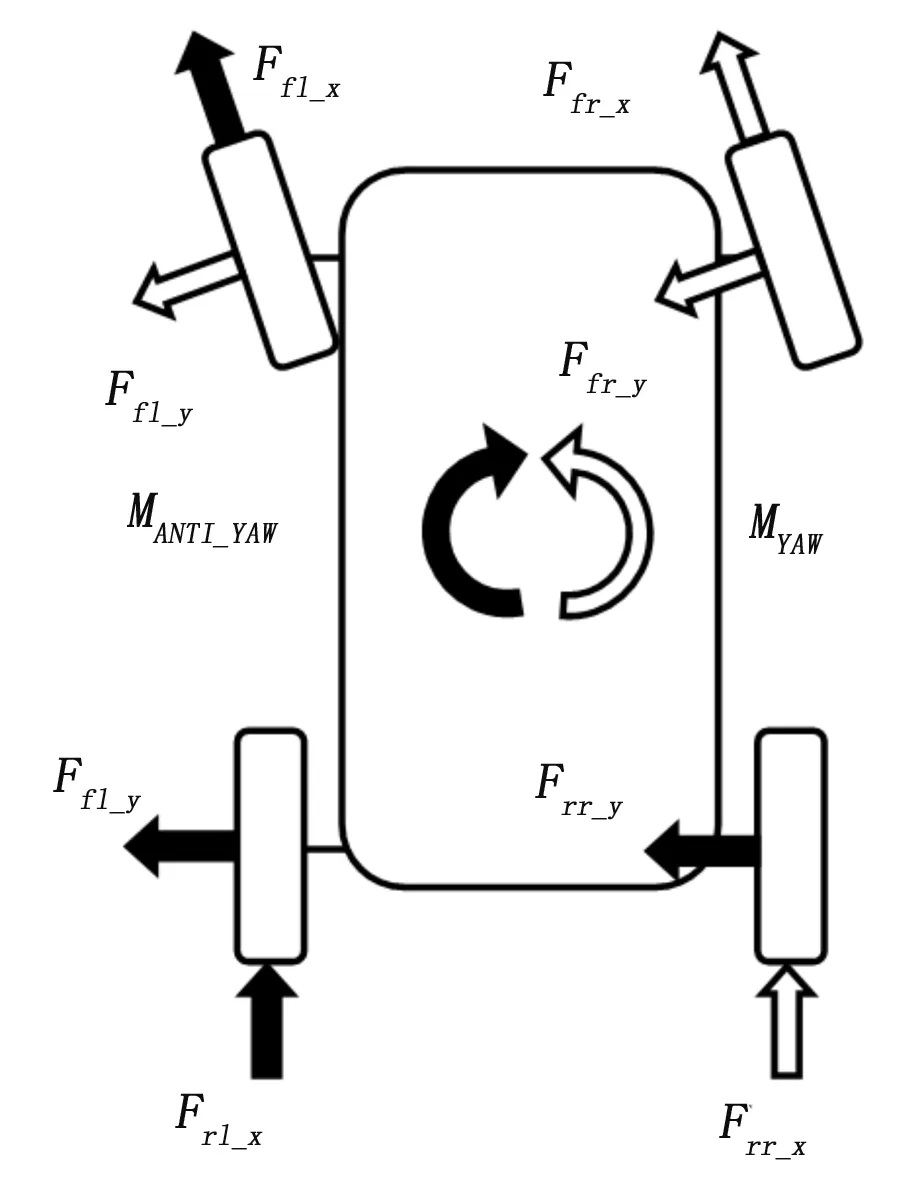

图4 左转工况车轮力分析图
图中,
F
fl_x
为左前轮的纵向力;
F
fl_y
为左前轮的侧向力;
F
fr_x
为右前轮的纵向力;
F
fr_y
为右前轮的侧向力;
F
rl_x
为左后轮的纵向力;
F
rl_y
为左后轮的侧向力;
F
rr_x
为右后轮的纵向力;
F
rr_y
为右后轮的侧向力。
则分类后的作用力如下所示:
有助转向的车轮力:Ffl_y、Ffr_x、Ffr_y、Frr_x;
阻止转向的车轮力:Ffl_x、Frl_x、Frl_y、Frr_y;
无论车辆转向角如何变化,各车轮力对转向的作用是不变的。
2 各个驱动模式横摆力矩调节特性数学分析
假设质量为1 296 kg的汽车,以70 km/h的速度和10°的前轮转角在摩擦系数为0.5的路面进行左转向行驶,且车辆前轮侧偏角比后轮侧偏角大,汽车实际转弯半径大于方向盘转角对应的转弯半径,车辆处于“不足转向”状态。根据之前讨论的轮胎侧偏特性和轮胎力分析,讨论各驱动模式的横摆力矩调节特性。
如图5所示,以前轮驱动为例,采用前轮驱动时后轮电机输出转矩为0,纠正车辆不足转向时,对前轮施加合理制动力,以产生相应的横摆力矩来调节车辆的转向角度[11]。
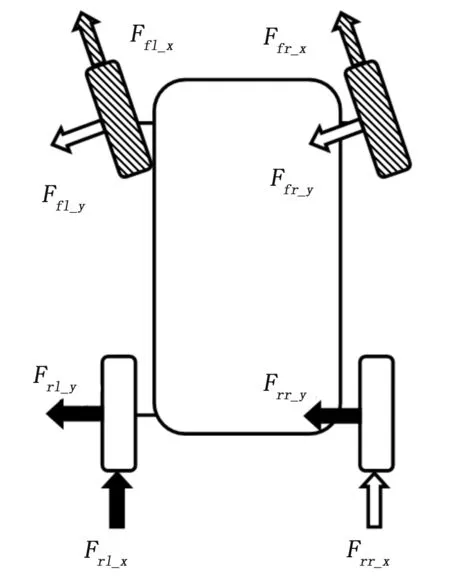
图5 左转工况前轮驱动车轮力分析图
则由前轮产生的车辆横摆力矩为:
(6)
又由轮胎侧向力与轮胎纵向力的关系:
(7)
(8)
式中,Dij_x、Dij_y(i、j=f,r)分别表示4个车轮纵向力和侧向力的作用点到车辆质心的距离,其值分别为:
式中,a、b分别为前后轴到车辆质心的距离;δ为前轮转角;d为车轮轮距。以逆时针方向为车辆横摆力矩的正方向,且正的横摆力矩有利于纠正不足转向。根据123式可知,M1,2是Ffl_x、Ffr_x的函数,即M1,2=f(Ffl_x、Ffr_x)。对纵向力Ffl_x和侧向力Ffr_x分配不同的值会得到不同的车辆横摆力矩值,为纠正车辆不足转向,分析产生最大横摆力矩值时纵向力Ffl_x和侧向力Ffr_x的分配值,则根据最优化理论,将问题转化为如下的最优化问题:
(9)
在本例中,a为0 N,b为1 587.6 N。使用MATLAB优化工具箱,采用有效集算法对此约束条件优化问题求解,得到结果如图6所示。
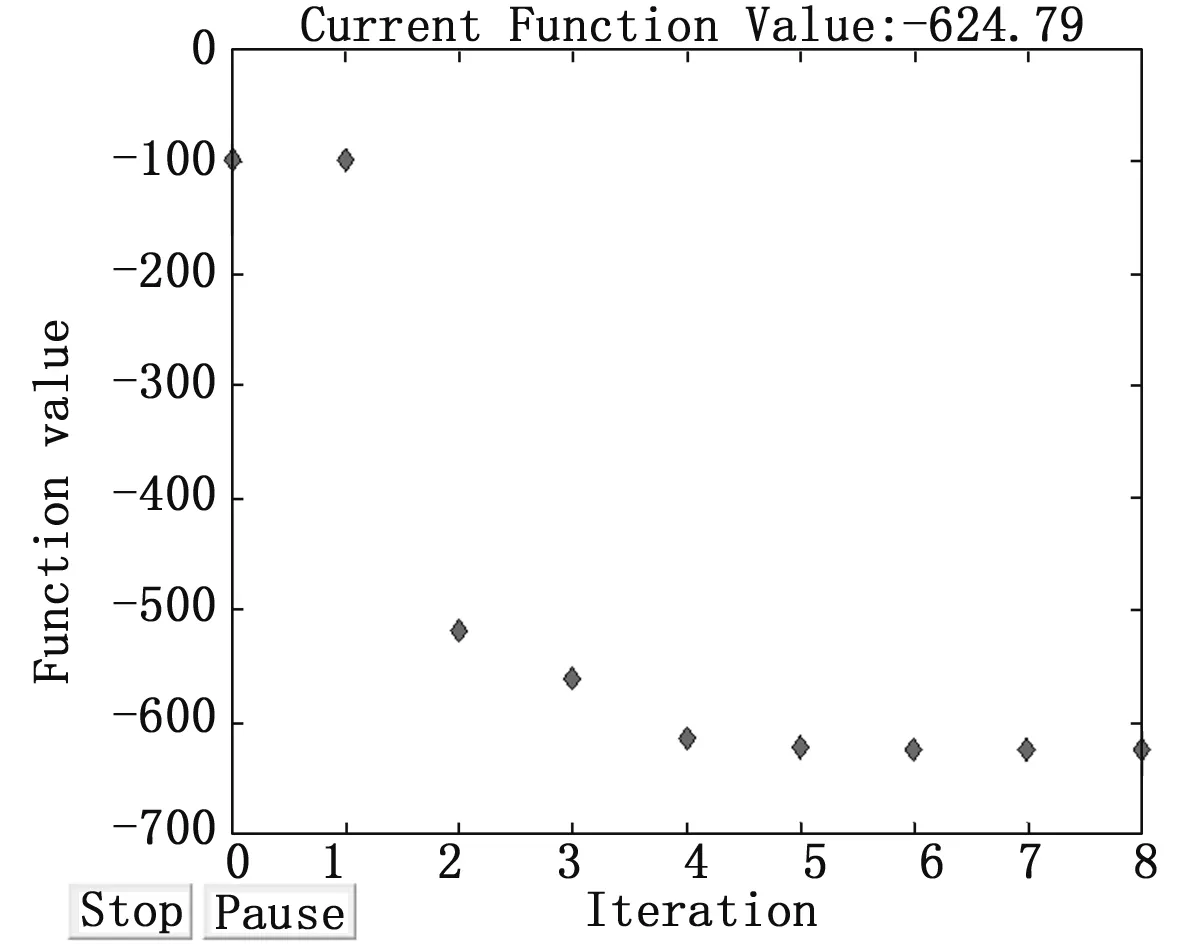
图6 前轮优化结果图
迭代初始值为[0;0],经过8次迭代,当Ffl_x=0;Ffr_x=1 027.098 N时有最大横摆力矩624.789 6 Nm。
对其他驱动模式采用同样的方法讨论,MATLAB优化结果如图7~9所示。
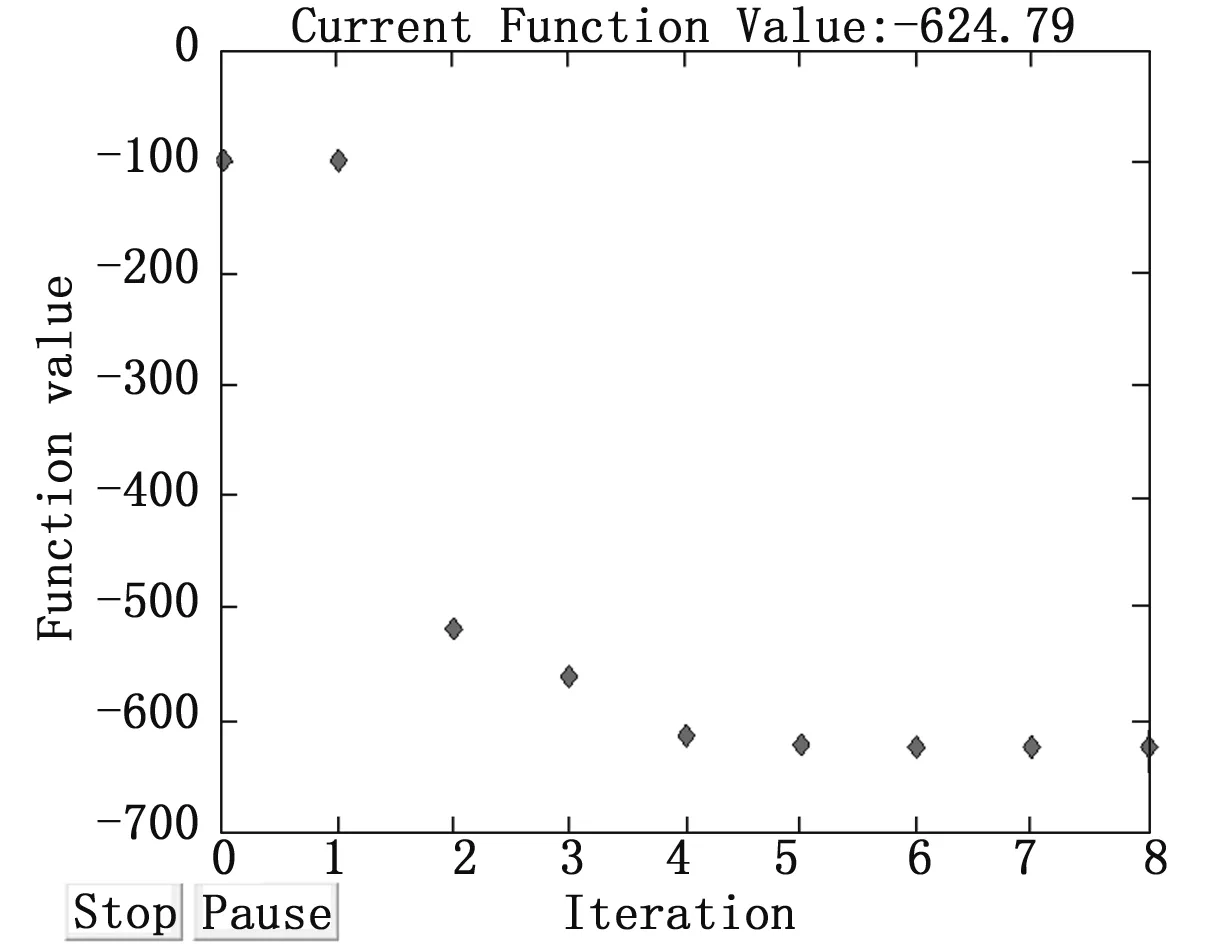
图7 对角驱动(2、3轮)优化结果图
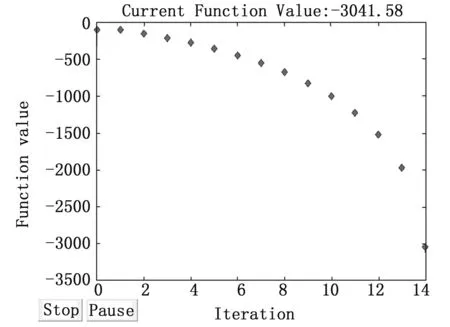
图8 对角驱动(1、4轮)优化结果图
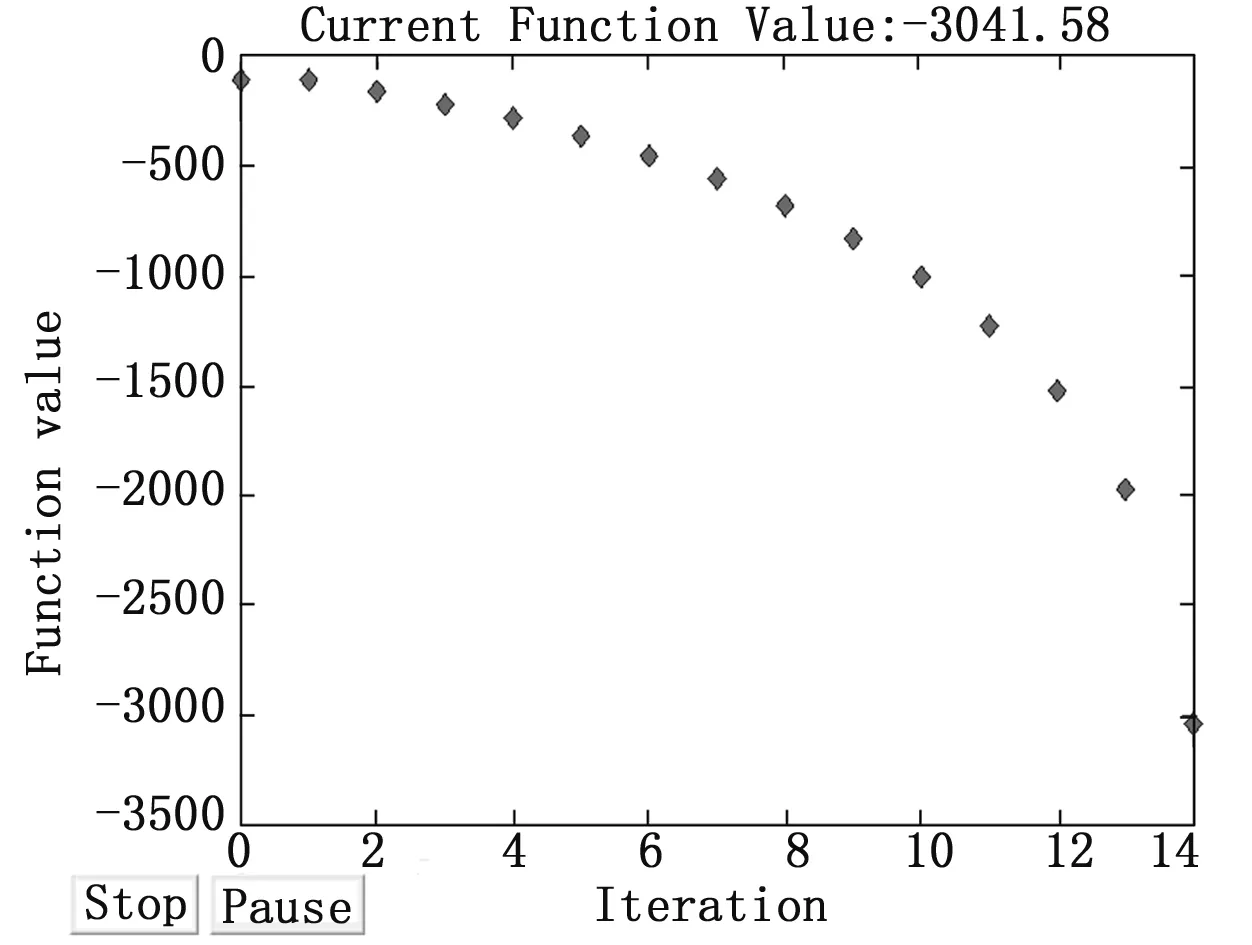
图9 后轮驱动优化结果图
结果归纳如表1所示。
由上文的轮胎力分析可知,本节讨论的4种驱动模式都有这样的特点:两个驱动轮的车轮纵向力所产生横摆力矩对车身转向影响不同,所以分配纵向力时,为获得最大正向或反向横摆力矩,应将产生不利影响的车轮纵向力分配0,让不利影响降到最低,这与优化结果一致。
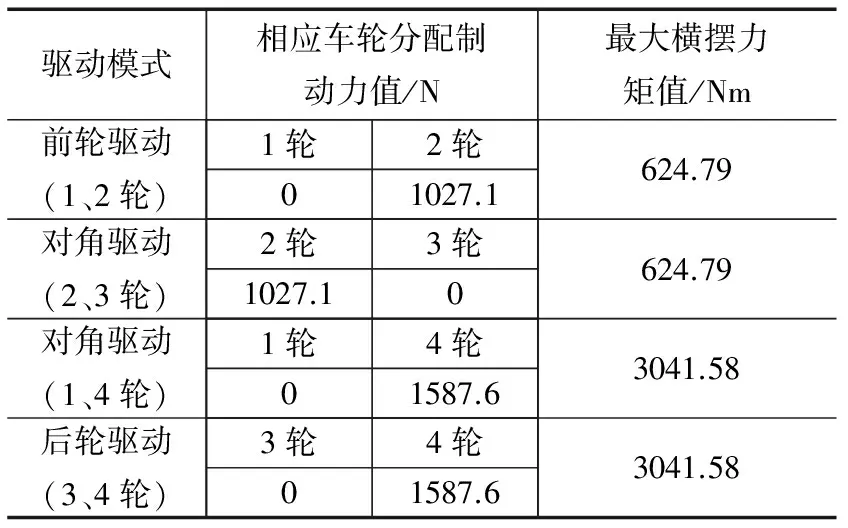
表1 优化结果归纳
从优化结果也可以看出,采用1、4轮对角驱动和后轮驱动能够产生的最大横摆力矩明显比另两种驱动所产生的最大横摆力矩大,这就为驱动模式的选择提供了依据,比如,当3轮失效时,我们可以选择1、4轮对角驱动或前轮驱动继续行驶,但是,当汽车改善转向特性时需要比较大的横摆力矩时,只有1、4轮对角驱动可以满足,这个时候,选择1、4轮对角驱动比较合理。
3 仿真与实验结果
为验证前几节所提理论的正确性,本文采用汽车动力学仿真软件TESIS DYNAware,以某中型四轮驱动汽车为样车,该样车模型主要参数如表2所示。

表2 车辆模型主要参数
3.1 直行工况仿真实验
工况设定:路面摩擦系数为0.5,车辆从静止开始启动,进行直线加速,设定30 s时车速稳定在50 km/h,但是5 s时发生左前轮(1轮)电机失效情况。失效情况发生0.5 s后,以保持车辆行驶稳定为目的,分别采用后轮驱动、对角驱动、和侧轮驱动对轮胎驱动力进行合理分配。
仿真时间23 s,结果如图10~12所示。分别是后轮驱动、对角驱动、和侧轮驱动行驶轨迹对比图、横摆角速度对比图、侧向角对比图。
图10 直行工况左前轮电机失效时各驱动模式车辆行驶仿真曲线。
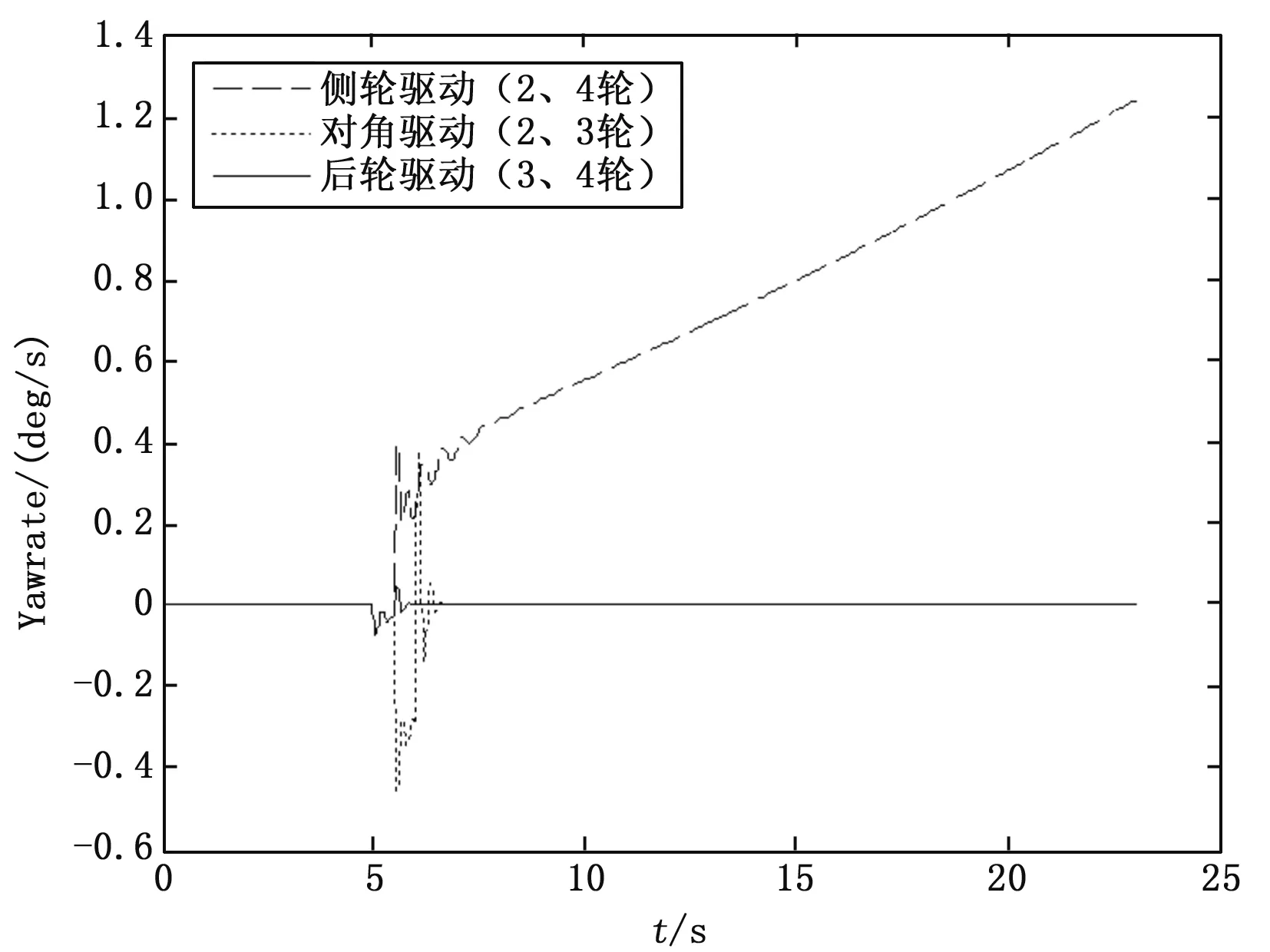
图11 直行工况左前轮电机失效时各驱动模式车辆横摆角速度仿真曲线

图12 直行工况左前轮电机失效时各驱动模式车辆侧偏角仿真曲线
失效情况发生后,左前轮的驱动力降为0,采用后轮驱动(3、4轮)时,将右前轮(2轮)驱动力设为0,合理分配后轮(3、4轮)车轮驱动力,从仿真曲线可以看出,驱动力合理分配后,车辆的横摆角速度和侧偏角最后都能趋于稳定为0,使车辆保持平衡,按预定轨迹行驶。采用对角驱动(2、3轮)同样可以达到车辆行驶稳定的目的。但是,采用侧轮驱动(2、4轮)时,对2、4轮分配驱动力将形成左右侧车轮的驱动力差值,这个差值在车辆质心上产生逆时针的横摆力矩,导致车辆产生侧向加速并向左偏航,从仿真曲线也可以看出,车辆的横摆角速度和侧偏角在逐渐增大,最后车辆偏离预定行驶轨迹,失效后18 s侧向移动13.8 m。
对比直行工况3种模式仿真结果可以看出,车辆单轮失效时,为保持稳定安全行驶,车辆应采用前后轮驱动或对角驱动行驶。
3.2 转向工况仿真实验
工况设定:路面摩擦系数为0.5,车辆从静止开始启动,进行直线加速,5 s时左前轮失效,分别采用对角驱动(2、3轮)和后轮驱动(3、4轮)模式驱动车身,15 s时车速稳定在50 km/h,15.5 s时驾驶员向左打方向盘,使前轮转角为10°并保持,控制相应车轮驱动力使车身跟踪设定轨迹。
仿真结果如图13所示。分别是车辆采用对角驱动(2、3轮)和后轮驱动(3、4轮)时的行驶轨迹与设定轨迹对比图。同样,图14、图15、图16分别是右前轮、左后轮、右后轮失效的控制仿真曲线。
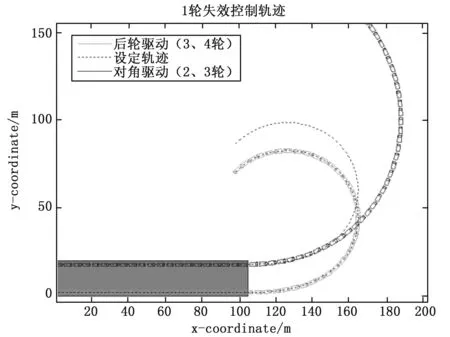
图13 转向工况左前轮(1轮)电机失效时各驱动模式仿真曲线
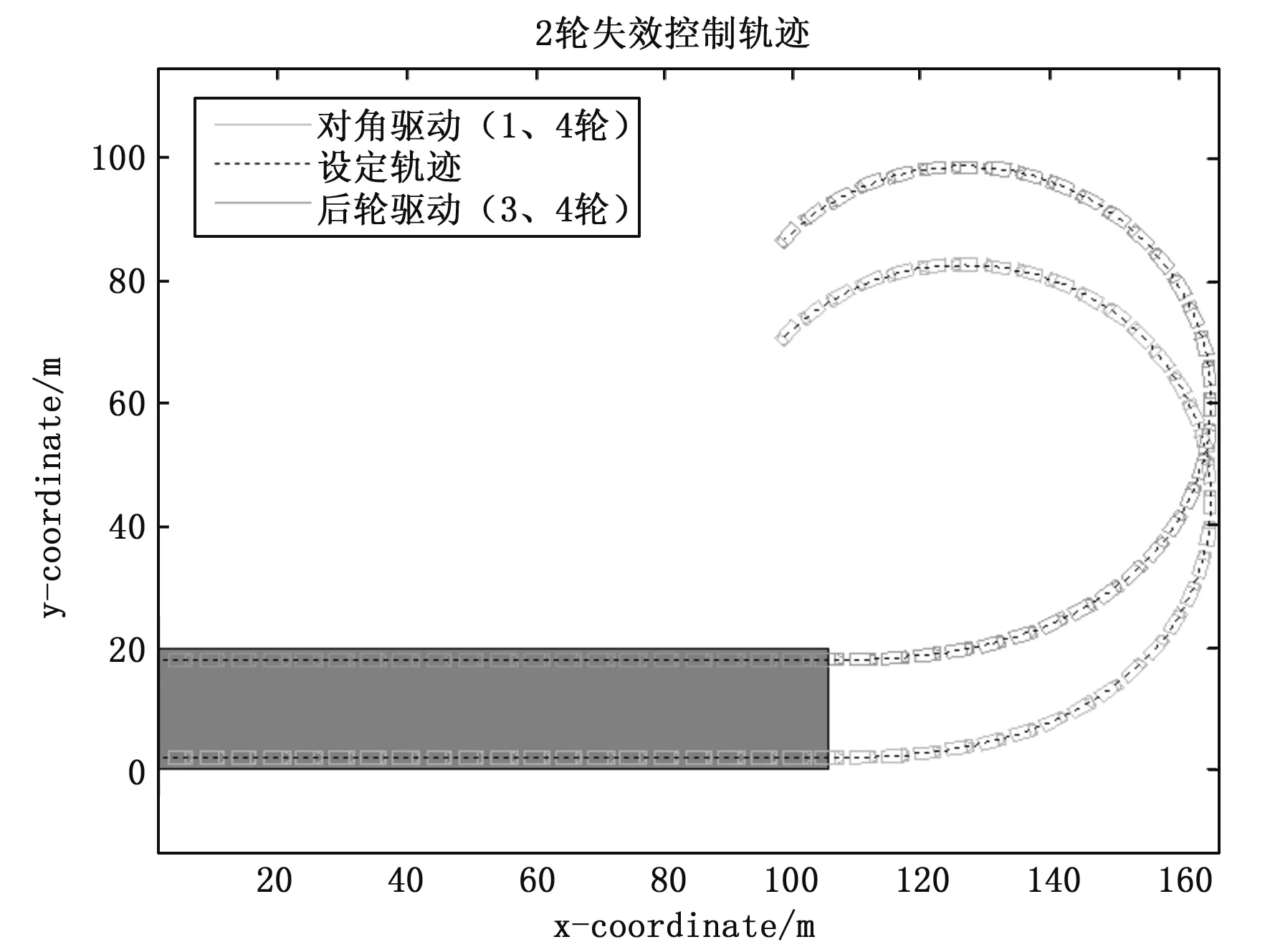
图14 转向工况右前轮(2轮)电机失效时各驱动模式仿真曲线
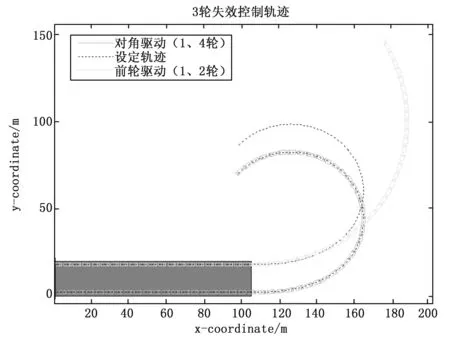
图15 转向工况左后轮(3轮)电机失效时各驱动模式仿真曲线
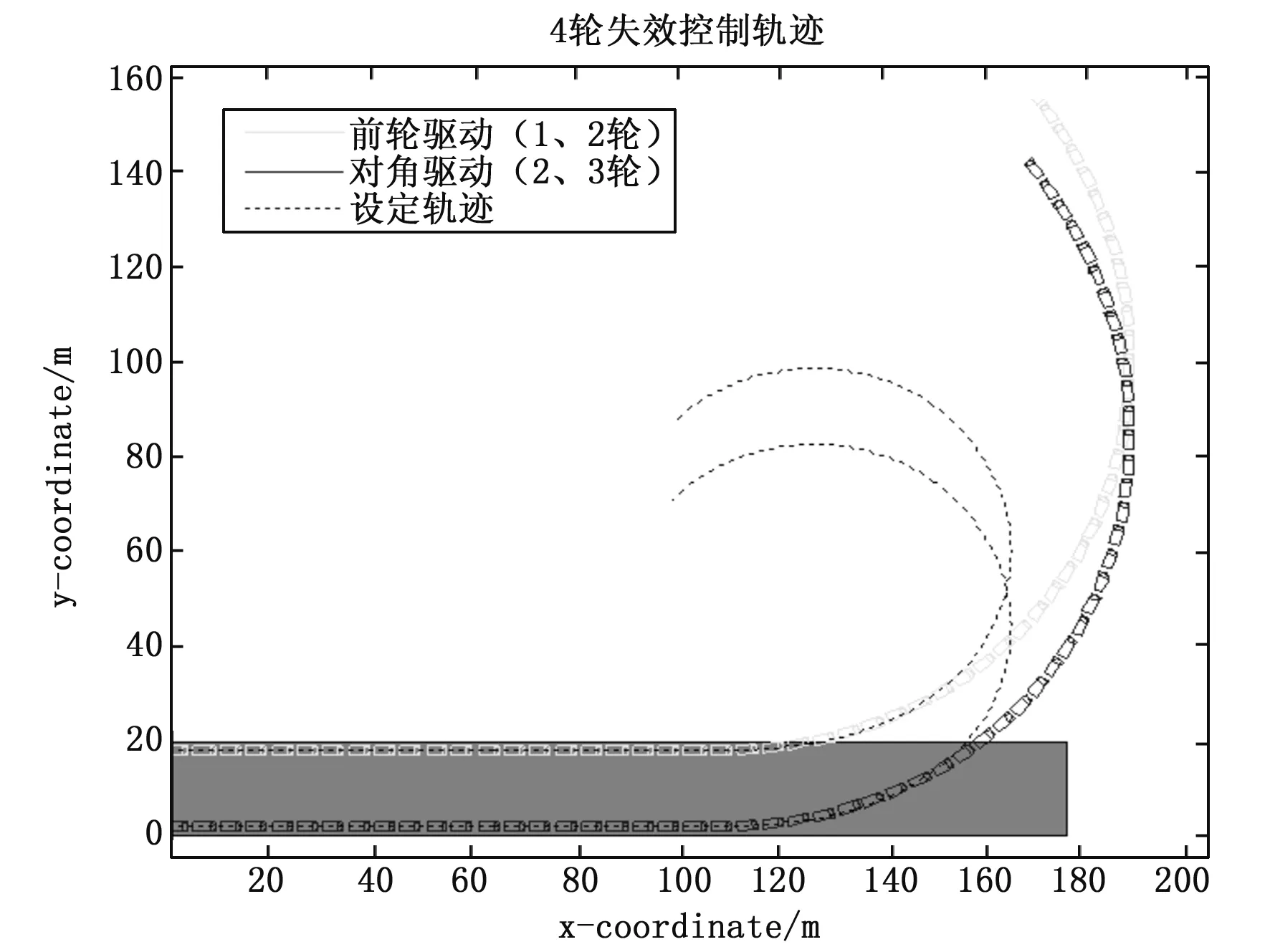
图16 转向工况右后轮(4轮)电机失效时各驱动模式仿真曲线
从仿真结果可以看出,左转向工况时对失效车辆横摆运动进行控制,采用前轮驱动(1、2轮)和对角驱动(2、3轮)无法产生足够横摆力矩,使得行驶轨迹不能跟踪设定轨迹曲线,车辆发生侧滑失稳。而采用后轮驱动(3、4轮)和对角驱动(1、4轮)时可以产生足够大的横摆力矩,能更好地改善车辆的转向特性,使行驶轨迹跟踪设定轨迹曲线。
4 结论
本文将四轮轮毂电动汽车四种驱动模式的转向力矩分配问题转化为一个有约束条件的最优化求解问题,并采用有效集算法求解,最终解决了单轮电机失效时四种驱动模式的选择问题。最后采用汽车动力学仿真软件TESIS DYNAware对所提理论进行了仿真验证。仿真结果表明本文所提理论依据可改善单轮电机失效时四轮轮毂电动汽车的转向特性,防止车辆侧滑失稳。
[1] Gao S, Mao C, Wang D, et al. (2016). Dynamic performance improvement of dfig-based wt using nadrc current regulators[J]. International Journal of Electrical Power & Energy Systems, 82, 363-372.
[2] Ivanov, Valentin, et al. All-wheel-drive electric vehicle with on-board motors: Experimental validation of the motion control systems[A]. Industrial Electronics Society, IECON 2015-41st Annual Conference of the IEEE[C]. IEEE, 2015.
[3] Ivanov V, Savitski D, Augsburg K, et al. Wheel Slip Control for All-Wheel Drive Electric Vehicle[A].Proc. The 18th International Conference of the ISTVS 2014[C]. 2014.
[4] Zhao, Wan Zhong Wang, et al. Primary studies on integration optimization of differential steering of electric vehicle with motorized wheels based on quality engineering[J]. Science China Technological Sciences, 2011, 54(11):3047-3053.
[5] Sahoo S K, & Bhattacharya T. (2016). Field weakening strategy for a vector-controlled induction motor drive near the six-step mode of operation[J]. Power Electronics IEEE Transactions on, 31(4), 3043-3051.
[6] Board, N. S. S., Washington, & DC. (2000)[Z]. Built to work: a common framework for skill standards, 48.
[7] 史宗莉, 宋万清. 变载荷工况下的轮胎动力学性能试验仿真[J]. 上海工程技术大学学报, 2016,30(1):6-10
[8] 汪 晨, 黄海波, 刘金朋, 等. 考虑轴头驱动和侧倾力矩的轮胎接地性态建模[J]. 中国机械工程,2016(7).
[9] 李 刚, 韩海兰, 赵德阳. 四轮轮毂电机电动汽车横摆力矩模糊pi控制研究[J]. 机械设计与制造,2015(7), 103-107.
[10] Yi Y, Zhuang H. Processing Method and Device for Optimizing Communication Network[Z].WO/2016/015277,2016.
[11] 张越佳. 汽车电动助力转向(eps)的研究[J]. 民营科技,2016(1), 35-35.
Active Disturbance Rejection Control for Yaw Rate of Four in-wheel Driven Electric Vehicle
Chen Rui,Sun He,Huang Guoqing
(First Aeronautical College of Air Force,Xinyang 464000, China)
Based on the study of the tire cornering characteristics and moment of force, this paper puts forward the question about how distribute four kinds of driver model of steering torque for four in-wheel independent drive (4WID) electric vehicles. Through mathematical analysis, this problem can be converted to optimization with constraint,then use the MATLAB optimization toolbox, and adopt active-set algorithm to solve this optimization problem, finally solved the problem about how distribute four kinds of driver model of steering torque when single wheel motor fails. To improve the over-steer characteristic of four in-wheel independent drive (4WID) electric vehicles when single wheel motor fails and prevent the vehicle side-slip provides a theoretical basis. Finally, the correctness of this conclusion is examined using a driving simulator system named TESIS DYNAware.
four in-wheel independent drive electric vehicles; torque distribution; single wheel motor failure; driver model
2016-07-16;
2016-09-13。
陈 锐(1989-),男,陕西咸阳人,硕士研究生,主要从事控制理论在工业领域和军事中的应用方向的研究。
1671-4598(2017)01-0061-05
10.16526/j.cnki.11-4762/tp.2017.01.018
TP273
A
