塔式起重机群机防碰撞设计
2017-02-25清邓建宇李
肖 清邓建宇李 丰
(1.江西理工大学应用科学学院 赣州 341000)
(2.赣州市建设工程安全监督管理站 赣州 341000)
塔式起重机群机防碰撞设计
肖 清1邓建宇2李 丰1
(1.江西理工大学应用科学学院 赣州 341000)
(2.赣州市建设工程安全监督管理站 赣州 341000)
塔式起重机多应用于建筑行业,一个区域内多台塔式起重机工作时,相互靠近的塔式起重机容易发生碰撞事故。本设计是基于2.4G频率的ZIGBEE通讯模块组网通讯,抗干扰性强,可配置通道号以区别不同的通讯组,通过其实现设备动态的接入,可完成局域范围内的数据交换,满足有限距离的通讯,从而满足局域塔式起重机防碰撞的需要。塔式起重机群机防碰撞系统,经实际检验,系统工作可靠,可广泛应用于工业、农业、交通、物流、电力、水利、环保等行业的塔式起重机防碰撞控制。
群机防碰撞 力矩限制器 Zigbee 物联网
塔式起重机作业可能存在的碰撞隐患,如单台塔式起重机与其他物体的碰撞隐患——塔式起重机吊绳与物体、吊钩与过往车辆、吊物与公共区域的碰撞;塔式起重机群作业时存在相互碰撞可能性。因此,塔式起重机群作业时需要使用塔式起重机安全监控系统,防止塔机之间以及塔机与其它物体之间的碰撞,并且防止塔机吊重物进入禁行、禁吊区域。对所有碰撞可能的危险和非法入侵提供实时预警、现场管理、远程监控、视频监控、无线传输等多种信息的智能测控,是一种非常有实用价值的安全防护监控设备,并逐渐广泛应用于建筑业施工起重机械。
由C8051F580单片机控制整个安全操作系统,其自动检测起重机所吊载物体重量质量、起重大臂所处的水平面角度,并能将额定载重量、实际载荷、垂直塔身的倾斜角度、大臂工作半径、起重臂垂直面所处的角度。实时监控检测起重机工况,具有设备自诊断功能,快速危险状况预警、报警及安全控制。具备黑匣子功能,自动记录作业时的实时工况,为事前分析、事中监管、事后追责提供依据。
市场上现有的塔式起重机防碰撞系统大多基于PC104主板、数据采集卡、DTU模块、ZIGBEE外置模块等硬件搭建的系统,这样的设计虽然在硬件设计上便捷,但是总体的体积较大、成本增加,并且有些不能做到单机本身自带群机防碰撞功能,即需要额外的主机专门作为防碰撞使用。
本设计基于ZIGBEE与GPRS联网的物联网络终端的塔机防碰撞设计,将GPRS模块、ZIGBEE模块集成到系统主板上,集成度高度增加,融力矩限制与群机防碰撞于一体,通过ZIGBEE模块组成MESH网络,设备动态加入,参数可通过远程设定、并可远程诊断系统本身的故障,其可广泛应用于需要加强塔式起重机安全监控的场合。
1 系统总体方案设计
塔式起重机群智能防碰撞安全防护系统由塔式起重机防碰撞安全系统(也即塔机力矩限制器终端设备)和塔式起重机群远程监控系统(后台系统)两部分组成。塔机智能安全防护系统主要有防碰撞报警、限位报警、禁行区、禁吊区防护、制动控制、运行状态实时监控、运行过程记录、历史运行状态查询、碰撞事故黑匣子记忆等功能。
塔式起重机群防碰撞报警系统由报警控制器、角度传感器、幅度传感器、高度传感器、无线通信控制器等组成。报警控制器用于塔式起重机碰撞危险的实时报警,报警形式:声音警示,显示屏图文并行警示;报警范围:碰撞危险预警报警、超限位报警、超力矩报警、超重报警、倾角报警、风速报警、禁行区及禁吊区报警。幅度传感器:感知塔式起重机小车距标准节的距离,精度:0.10m;角度传感器:感知塔式起重机吊臂的角度,精度:0.3°;高度传感器:感知吊钩高度,精度:0.10m;倾角传感器:检测塔身倾斜角度,精度0.01°;风速传感器:检测风速;无线通信:用于塔式起重机与塔式起重机之间,塔式起重机与远程监控器数据通讯的无线传感器网络设备。有效距离:1.5km;频点范围:2.4GHz。系统功能结构图如图1所示。

图1 塔机防碰撞系统功能结构图
2 终端硬件设计
系统硬件核心控制器主要为C8 0 5 1 F 5 8 0,人机交互由贴膜键盘、8.0TFT显示器(像素点800×600)、报警蜂鸣器组成,硬件系统的电路计主要包括C8051F580主模块电路、局域组网ZIGBEE通讯模块、开关电源模块、I/O扩展模块和人机交互模块。C8051F580主模块电路包含UART串口通讯电路、信号滤波及跟随电路、传感器接口电路等。
塔式起重机涉及起重安全,系统稳定性要求高,特别是塔式起重机电机启停频繁,对监控系统的干扰特别大尤其是对系统终端的电源冲击。为保证系统稳定,在电源侧设计了共模磁环抗干扰电路过滤共模的电磁干扰信号、安规电容保护电路,如图2所示。

图2 抗干扰及保护电路
幅度、角度、高度等传感器输出为0~5V标准信号,其接入电路如图3所示,输入端设有滤波电容,滤除干扰信号。
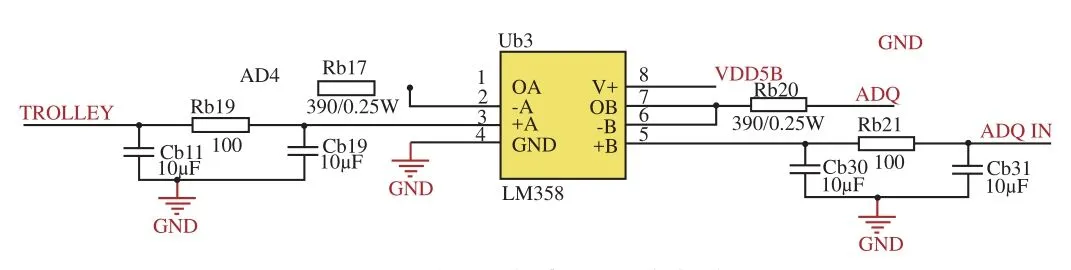
图3 信号滤波及跟随电路
为保证塔机防碰撞的可靠性,独立采用了一片C8051F340作为从机用于塔机群的组网通讯,获取的相关数据再与主单片机通讯。
3 系统功能
塔机力矩限制器终端设备和数据库及平台无缝融合,实现了实时、开放、多源数据的监控,在对塔式起重机实现力矩、载重、角度、风速等关键参数进行监控、记录和声光报警;可根据客户需要定制手机短信通知功能,向相关人员进行短信报警,使得塔机安全监控成为开放的、实时动态、可溯源的监控。
实现了塔式起重机联网及起重设备工况安全的实时在线监测,从技术手段保障了监管部门、使用者对塔机使用过程和行为的实时监控,真正将控制设备运行过程中的危险因素和安全隐患落到实处,切实有效的防范塔式起重机安全生产事故发生。
塔式起重机集群智能防碰撞安全防护系统集成全方位安全监控功能:终端设备上的各台塔机的参数设置;载重、幅度、力矩、倾角、风速等信号采集;阈值设置及预警、报警;控制输出;单机防碰撞;塔式起重机集群防撞;运行数据终端设备存储和远程下载;数据报表功能;短信通知;塔机违规管理;租赁商管理权限(远程加锁、解锁);设备定位;多级别监控授权。
4 塔式起重机参数设定
群塔防碰撞需要设定群塔在区域的参数,见表1。

表1 参数设定列表
通过系统终端人机界面设置表1中的参数。
5 无线传感网络节点的动态加入与局域数据交换
每一个塔式起重机防碰撞设备都将传感器检测、无线通信、计算能力集成在终端,也即成为一个无线传感网络节点。每个终端节点采用动态方式加入和退出,防碰撞区域的设备能通过竞争获得主机控制权,即便同时开机或者现有成为主机的设备关机退出了,所有其它节点的设备亦能正常工作。
各节点控制器将检测载重、角度、幅度等变量,并将数据上传给本防碰撞区域的主机,主机再将数据统一发给各从机,局域间的通信通过2.4G无线传输模块(ZIGBEE)交换数据。主机作为主控节点完成局域无线信号收发控制,并对信号进行必要的转换和预处理。现场无线数据采集节点可以有多个。防碰撞系统参数可由一台终端设定并将参数发给本群组的其它设备,无需到每台终端上去设置。每台终端既能独立地完成数据采集和控制,又可将数据传送到现场主机。
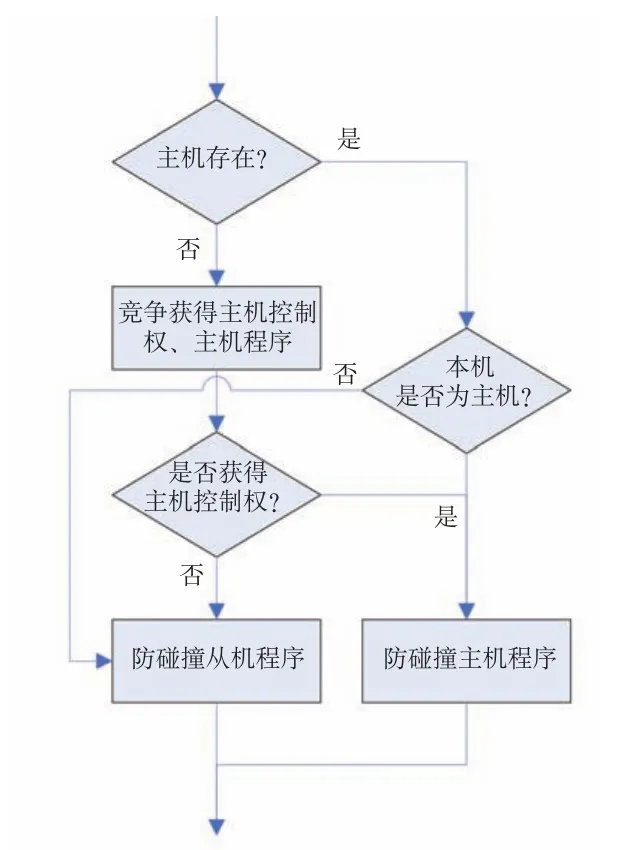
图4 动态节点加入流程图
6 防碰撞算法
在本塔机进行防碰撞判断之前,先由微处理器模块通过幅度传感器和角度传感器获取本塔机信息,从而计算出本塔机的大臂末端坐标和小车坐标,再通过ZIGBEE无线通信获取干涉塔机的大臂末端坐标、回转中心坐标、干涉塔机的大臂长,然后进行防碰撞判断。
防碰撞方法判断如下,假设:
x1和y1分别为本塔机大臂末端的横坐标和纵坐标;
x2和y2分别为干涉塔机大臂末端的横坐标和纵坐标;
x3和y3分别为干涉塔机回转中心的横坐标和纵坐标;
x4和y4分别为本塔机小车的横坐标和纵坐标;
L1为本塔机大臂末端与干涉塔机大臂末端间距,
其公式为:

L2为本塔机大臂末端与干涉塔机回转中心间距,其公式为:

L3为本塔机小车到干涉塔机回转中心间距,其公式为:

当以下三种情况任意一种发生时控制器将发出报警,提醒操作人员注意操作,从而起到防碰撞报警作用:
情况一:如图5(a)所示,当 L1小于防碰撞限定值时;
情况二:如图5(b)所示,当L1+L2-L3小于防碰撞限定值时;
情况三:如图5(c)所示,当小车进入干涉区(即L3小于L2)时(若本机大臂高度低于相干涉的塔机的大臂高度,将不需要考虑本情况,大臂高度参数需在使用前录入)。
通过ZIGBEE通信模块,实现了塔机间的无线通信,使得防碰撞信息的获取成为可能;在获取了防碰撞信息的基础上,通过上述判断方法的判定,实现了针对塔机集群作业防碰撞的全方位安全监控,有效避免碰撞事故发生。

图5 防碰撞示意图
7 输出控制与报警
根据前一小节的防碰撞算法进行判断是否将发生碰撞,并根据这一结果进行报警和控制输出防止发生碰撞。
7.1 回转方向标定
由于控制器与塔机旋转方向并无关联,所以要进行塔机回转方向标定,使得回转传感器(行程限位器)反馈到系统的AD值增加或减少与回转方向关联。
在角度标定时,按照系统图示要求先标0°,然后顺时钟旋转90°,如果90°对应的角度AD值比0°时的角度AD值大,将回转方向标志位Rotary_ Direction写为“1”,否则写为“0”。
7.2 塔机回转危险方向判断
为进行回转控制,就必须对塔机回转危险方向进行判断。如果塔机进入报警区域,那么回转危险方向记录到Rotary_Danger_Direction(0:回转无危险;1:顺时钟回转危险;2:逆时钟回转危险),如果当前运动方向进入危险方向,那么该方向将记录到Rotary_ Danger_Direction,并且系统将禁止该方向的运动,但可反方向运动,直到其离开报警区域后 ,Rotary_ Danger_Direction将被置0。此外,进入危险区域后,塔式起重机小车将禁止向外变幅。
为了准确判断出危险方向,记录危险标记Rotary_Danger_Direction,将在由非报警区进入报警区时修改回转危险方向,而由报警区退出报警区时将回转危险方向记录清零。
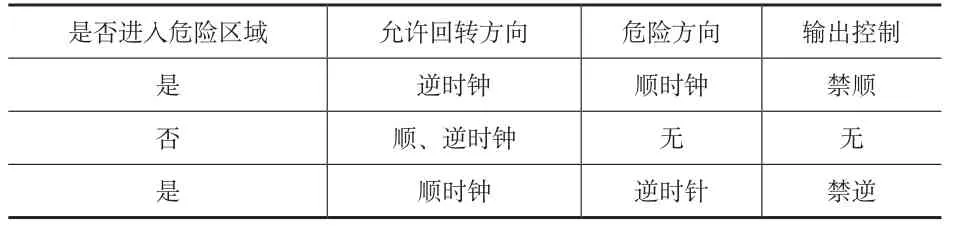
表2 回转控制逻辑表
8 局域数据通信
系统形成基于Zigbee通讯模块的MESH网络,组网通讯,实现局域数据通讯。每台终端设备在本工作群组都有一个Zigbee通讯模块,设有唯一的ID。开机后该群组的设备将展开竞争,其中一台的终端设备成为主机,负责组网通讯,其它作为从设备,每台终端设备都通过主机无误的获取数据,对10组设备通讯测试对比,统计数据显示通讯准确率达100%。如果主机退出后,其它剩余的设备将竞争产生一台主机,继续完成数据收发的任务。
9 总结
塔式起重机集群防碰撞系统安装在江西理工大学校内建设工地的两台塔式起重机上、北京央视大楼附近的CBD项目,经过多月的实际测试,其有效的提高了作业安全性,系统运行可靠。本算法及系统应用于建筑用塔式起重机的集群防碰撞,可靠性高,其通过系统局域组网通讯模块Zigbee模块组网,实现了区域低成本、高可靠的通讯,系统具有很强的开放性,设备动态接入,灵活方便。
本系统对建设施工垂直运输起重设备——塔机进行监控、预报警、记录数据的同时,通过移动通讯基站将塔机运行各项涉及安全数据和预警、报警信息等发送到服务器,并能在发生报警或者违规操作时自动触发手机短信通知,也可在手机上安装APP,系统会自动将塔机运行信息推送至手机,从而实现有效的、开放的、实时的、动态的、可溯源监管。
其工作原理及设计思路适用于测点分布范围广、数据需要远距离传输的应用场合,系统设计可移植应用于工业过程控制、便携式仪器仪表、测量、无线智能传感器以及远程数据采集系统中。
[1] 潘琢金.C8051 Fxxx高速SoC单片机原理及应用[M].北京:北京航空航天大学出版社,2002.
[2] 令召兰.基于MAS的多塔机防碰撞控制系统研究[D].西安:西安理工大学,2007.
[3] 杨鹏.基于MSP430和nRF905的塔式起重机无线遥控系统[J].机电工程,2008,25(1):34-36.
[4] 傅健.基于单片机控制的塔式起重机起重性能显示[J].PLC&FA,2006,(05):94-96.
[5] 皮红梅,杨松,李英顺.用单片机技术实现起重机力限器的设计[J].吉林化工学院学报,2003,20(2):70-72.
[6] 张大志.塔式起重机力矩限制器调试[J].建筑机械,2003,(04):55-57.
[7] 赣州德业电子科技有限公司.一种塔机集群作业防碰撞方法及其装置[P].中国:ZL201110126096.2,2013-05-15.
Anti-Collision Design of the Tower Crane
Xiao Qing1Deng Jianyu2Li Feng1
(1. College Of Applied Science, Jiangxi University Of Science and Technology Ganzhou 341000)
(2. Ganzhou construction safety supervision and management station Ganzhou 341000)
The tower crane is more and more used in the construction industry, crash accident between adjacent tower cranes is easy to happen when a plurality of tower crane machine are working in one region. This design is based on wireless network communications using ZIGBEE module in 2.4G frequency with high anti-interference performance, can arrange different communication ID address and channel number for different sites, could take data exchange in a local region through its implementation of dynamic access equipment to satisfy communication in fnite distance and the requirement of collision preventing of tower cranes in a local region. Through the actual test, tower crane anti-collision system works reliably, and can be widely used on torque control device in industry, agriculture, transportation, logistics, electricity, water conservancy, environmental protection and other industries.
Group for preventing collision Torque control ZIGBEE Internet of things
X941
B
1673-257X(2017)01-0021-05
10.3969/j.issn.1673-257X.2017.01.004
肖清(1975~),男,硕士,讲师,主要从事微机控制、物联网技术应用工作。
2016-04-26)