一种改进积累与判决的动态规划检测前跟踪算法
2017-01-18陈家瑞
陈家瑞,柏 磊,严 俊
(中国船舶重工集团公司第723研究所,扬州 225001)
一种改进积累与判决的动态规划检测前跟踪算法
陈家瑞,柏 磊,严 俊
(中国船舶重工集团公司第723研究所,扬州 225001)
由于传统的动态规划检测前跟踪算法(DP-TBD)采用多帧积累提高信噪比,所得到的目标函数在目标轨迹末端形成的峰值并不是特别尖锐,会在对后续的门限判决回溯目标轨迹时出现虚假目标。首先简单介绍了DP-TBD算法,并提出一种改进的算法,通过改进相邻2帧迭代积累为相邻3帧进一步提高信噪比。在门限判决时,不是直接对目标函数进行门限判决,而是提取目标函数局部最大的极大值,然后通过对这些值进行门限判决,从而可以减少虚假目标个数进而提高检查性能,最后通过单个运动目标和两相交运动目标仿真验证了该算法改进的可行性和有效性。
检测前跟踪;动态规划;局部极大值;信噪比
0 引 言
针对远距离的微弱目标,雷达天线可接收的回波信号能量很弱,用传统雷达积累与检测等方法已不能可靠地检测出目标,为检测此类微弱目标,必须获得更多信号能量[1-3]。检测前跟踪技术(TBD)是一类多帧信号积累技术,它早期应用于红外和光学图像处理,基本思想是对多帧信号进行处理,首先进行目标预检测,然后对检测出的目标进行多目标跟踪,由目标的运动特征沿各种可能轨迹积累能量,最后对各能量积累值进行检测判断,进而检测出真实目标,提取出目标的轨迹[4-7]。上世纪80年代,Yair Barniv提出TBD动态规划实现算法(DP-TBD),极大减少了算法的计算量,而后S.M.Tonisson等人发展了该算法并进行了详细的性能分析,目前DP-TBD算法已经被应用到了雷达微弱信号检测领域中[8-11]。
DP-TBD算法中,目标轨迹能量虽然得到了有效积累,但在目标轨迹能量积累的各个阶段,目标能量均会扩散。那么在k帧图像序列中,前k-1帧中的目标轨迹能量积累值将扩散到第k帧领域窗的每个点,进而在每个目标所在区域都累积出1个棱锥形状的凸起,造成该算法最终设置判决门限极其困难。本文对传统的DP-TBD算法中的迭代积累和门限判决步骤进行了改进,减少虚假目标个数,从而提高检测性能。在递推积累时,改进相邻2帧积累为相邻前后3帧数据积累,提高积累信噪比;另外,在门限判决时,不是直接对目标函数进行门限判决,而是提取目标函数局部最大的极大值,然后通过对这些值进行门限判决,减少虚假目标个数进而提高检查性能。该算法与改进前的动态规划TBD算法相比,检测性能有所提高,得到的目标航迹更加准确。
1 DP-TBD算法基本原理

(1)
式中:xk,q(k),H(k)和Q(k)分别表示k时刻目标的状态向量、过程噪声、状态转移矩阵和过程噪声分布矩阵。
用1个M×N的矩阵Z(k)记录k时刻第(i,j)个分辨单元内的量测值zij(k)。
(2)
对于每个观测值zij(k),有:
(3)
式中:wij(k)为k时刻第(i,j)个分辨单元上的观察噪声;A(k)为目标强度。
若第(i,j)个分辨单元在k时刻有目标,则其量测zij(k)为该分辨单元内的目标幅度A(k)与该时刻噪声强度wij(k)之和。
(4)

动态规划要解决的问题就是:希望能够根据从初始帧到第K帧的所有测量数据:

(5)
(6)
式中:VT为第K帧数据空间的判决门限。
2 DP-TBD算法改进
2.1 相邻3帧进行递推积累
TBD算法主要是通过多帧的非相干积累,利用多帧数据提高信噪比,DP-TBD算法中第2步实现多帧的递推积累,实现多帧积累提高信噪比,提高最后门限判决的准确性。在DP-TBD算法中,当信噪比较低时,仅靠第k和k-1帧的数据实现递推积累对提高信噪比的效果是有限的,可能无法达到检测的目的。为此,可以考虑改进DP-TBD算法中的第2步,在递推积累时,不仅考虑到第k和k-1帧的数据,还考虑到第k+1帧的数据即通过第k,k-1和k+1帧数据累加找到最大值,并记录最大值的第k-1帧位置,其目标递推函数可以改写成:
(7)
图1 改进递推积累示意图
2.2 终止判决的改进
DP-TBD算法是将多帧数据通过递推积累实现信噪比提高得到目标函数,然后根据判决门限提取出大于门限值的目标函数值所对应的状态向量,最后根据状态向量进行回溯检测到目标轨迹,实现目标跟踪。通常在进行门限判决时,其判决门限VT是根据虚警概率确定,假设背景噪声为高斯噪声,则门限确定公式:
(8)
式中:Φ(x)为标准高斯的分布函数;uK、σK分别为噪声累加K帧后的概率密度均值和方差;n=M×N×q,其中q为状态转移的数目。
目标函数沿着航迹递推积累到第K帧时,会出现峰值,如图2所示。1个峰值代表1个目标,门限判决时就是提取超过门限的峰值位置所对应的状态向量,然后回溯目标轨迹。但是,目标函数的峰值并不是特别“尖锐”,因此,在进行门限判决时,很难只提取到超过门限的峰值位置状态向量,难免会把峰值周围超过门限的单元也提取出来,这样会出现虚假目标,影响跟踪质量。虽然可以通过降低虚警率提高门限来减少虚假目标,但是不能无限地降低虚警率,如果进一步降低虚警率势必会降低对真实目标的检测能力。当有目标轨迹交叉时,目标函数峰值会出现“钝化”,这种情况更为明显,如图3所示。

图2 单目标轨迹和目标函数积累后平面图
图3 交叉目标轨迹和目标函数积累后平面图
针对上述描述的判决问题,可以考虑提取局部最大的极大值与判决门限相结合。从积累后的目标函数可以看出,虽然目标函数的峰值“钝化”,但是在峰值附近的一个小区域里面只有1个极大值。因此,可以将积累得到的目标函数划分多个小区域,求出各个小区域的最大的极大值,然后再对得到的这些值进行门限判决。
2.3 改进后算法步骤
Step 1:初始化
对第1次扫描,第(i,j)的位置单元的目标函数和Φx1(1)初始化。
(9)
k=2时:
(10)
Step 2:递推积累
对所有可能的状态xk,3≤k≤K-1有:
(11)
当k=K时,递推积累目标函数。
(12)
Step3:终止判决
在第K时刻,将目标函数在x-y平面内划分多个区域,求出各个区域极大值,找到各区域目标函数极大值中最大值位置所对应的状态向量:
(13)

(14)
Step4:轨迹回溯
对于上一步得到的每一xk,利用公式:
(15)
逆序递推,得到估计目标轨迹式(16),实现目标跟踪。
(16)
3 实验仿真
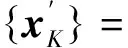
为验证修改后DP-TBD算法性能的提高,将进行单目标和两交叉目标仿真实验,采用测量区域为50×50个单元,15帧数据积累,每帧时间间隔为1s。在单目标仿真中,目标起始位置(10,40),x方向速度为2 单元/s,y方向速度为-2 单元/s,所加噪声为高斯噪声,其信噪比SNR=6dB。在交叉目标仿真中,由于DP-TBD对多目标的检测能力并不是很好,特别分辨相距不远目标的能力有限,因此,在交叉目标仿真中,将目标的起始和终止位置设置相距较远,另外信噪比较单目标情况要大,其中,目标1与单目标时参数相同,目标2起始位置(25,10),x方向初始速度为0,加速度为0.1 单元/s2,y方向速度为2 单元/s,其信噪比SNR=8dB。单目标和交叉目标仿真实验检测轨迹结果分别如图4和图5所示。
实验采用改进后的递推积累,图4中的(a)、(b)、(c)和图5中的(a)、(b)、(c)分别为通过虚警率为10-2、10-3和10-4算得判决门限直接进行终止判决,图4(d)和图5(d)为改进后的终止判决方式处理,即将最后得到的目标函数划成多个7×7 的小区域,求出每个区域中最大的极大值,然后采用虚警率为10-3进行判决。
对比图4中的(a)、(b)、(c)和图5中的(a)、(b)、(c)可以看出,无论是单目标还是交叉目标,随着要求虚警率的降低,检测结果中虚假目标的个数减少,但是并不能完全消除,如果想进一步降低虚警率提高判决门限,势必会造成对真实目标检测的遗漏。图4(d)和图5(d)中采用了改进后的终止判决方式,即便采用虚假率为10-3进行判决,其最后的检测结果仍比改进前采用虚警率为10-4算得门限进行终止判决得到的检测效果要好,很好地检测出目标运动轨迹,同时消除了虚假目标。

图4 单目标轨迹检测结果
图5 交叉目标轨迹检测结果
4 结束语
为了提高传统DP-TBD算法的检测性能,减少判决时出现的虚假目标,本文通过对传统的DP-TBD算法中的迭代积累和门限判决步骤进行了改进。通过改进相邻2帧迭代积累为相邻3帧迭代积累进一步提高信噪比,在门限判决时,提取目标函数局部最大的极大值,然后通过对这些值进行门限判决,减少虚假目标个数,提高检测性能。最后通过单目标轨迹和交叉目标轨迹的检测仿真实验验证了改进后DP-TBD算法的有效性和可行性。
[1]TURLEYMDE.Signalprocessingtechniquesformaritimesurveillancewithskywaveradar[C]//Radar,2008InternationalConferenceonIEEE,2008:241-246.
[2] 王俊.微弱目标信号积累检测的方法研究[D].西安:西安电子科技大学,1999.
[3] 黄大羽.复杂环境下弱目标检测与跟踪算法研究[D].南昌:华东理工大学,2012.
[4] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].1版.北京:电子工业出版社,2008.
[5] 何友,修建娟,张晶炜,等.雷达数据处理及应用[M].1版.北京:电子工业出版社,2008.
[6] 强勇,焦李成,保铮.动态规划算法进行弱目标检测的机理研究[J].电子与信息学报,2003,25(6):721-727.
[7] 吴为,陈建文,王永良,陈辉.一种基于动态规划的多目标检测方法[J].空军雷达学院学报,2008,22(1):18-21.
[8] 曲长文,黄勇,苏峰.基于动态规划的多目标检测前跟踪算法[J].电子学报,2006,34(12):2138-2141.
[9] 孙立宏,王俊.高速运动雷达弱小目标检测方法研究[J].系统工程与电子技术,2008,30(2):258-260.
[10]吴为,陈建文,王永良,陈辉.一种基于动态规划的弱目标检测方法[J].空军雷达学院学报,2008,22(1):18-22.
[11]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].1版.北京:电子工业出版社,2008
A Dynamic Programming Track Before Detection Algorithm Based on Improved Accumulation and Sentence
CHEN Jia-rui,BAI Lei,YAN Jun
(The 723 Institute of CSIC,Yangzhou 225001,China)
As traditional dynamic programming track before detection (DP-TBD) algorithm uses multi-frame accumulation to improve the signal-to-noise ratio (SNR),the peak value of the target function formed at the end of the target trajectory is not particularly sharp,false targets will appear in the subsequent threshold decision backtracking to target trajectory.This paper firstly introduces the DP-TBD algorithm,and proposes an improved algorithm,which further improves the SNR through improving adjacent two frames iteration accumulation to adjacent three frames.In the threshold decision,it is not directly to perform threshold decision to the objective function,but the maximum value of the local maximum of the objective function is extracted,then the threshold decision is performed to the values,thus the false target number can be reduced and the check performance is improved.Finally,the feasibility and effectiveness of the proposed algorithm are verified through the simulation of single moving target and two intersecting moving targets.
track before detection;dynamic programming;local maximum;signal-to-noise ratio
2016-06-22
TN957
A
CN32-1413(2016)06-0077-06
10.16426/j.cnki.jcdzdk.2016.06.017