城轨牵引供电系统PWM整流器无源性功率控制研究*
2017-01-10田玖婷武晓春
田玖婷,武晓春
(兰州交通大学自动化与电气工程学院,兰州730070)
0 引 言
现行城轨接触网(轨)的供电电压普遍采用多脉波整流来获得,这种控制策略不能实现能量的反馈,因此会导致能量的浪费。PWM整流器具有单位功率因数运行以及能量的双向流动特性,在大功率领域以及高压直流输电获得广泛关注,作为一种新型的PWM可逆变流器,将电压型PWM整流器应用于城轨牵引供电系统会带来很大的经济效益,本文主要是对其控制方法进行分析研究。
PWM整流器用于牵引传动系统的研究时间较长,基于PWM整流器的各种优点,各国学者积极展开研究,衍生出了多种控制策略。直接功率控制(direct power control,简称DPC)采用功率内环滞回控制,以其功率快速跟踪特性,高功率因数整流特性,算法简单,响应快等优点[1-2],备受学者关注,不足的是功率内环滞回控制方法会引起开关频率变化,因此系统设计复杂。基于虚拟磁链的直接功率控制策略[3]的提出,不仅实现了降低开关频率和电流总畸变率(total harmonic distortion,THD)的目的,同时也简化了电压和功率算法。功率预控制策略[4-5],可以进一步提高功率控制精度;文献[6]采用了空间矢量简化算法用来计算矢量所在扇区,降低系统的谐波畸变率(THD)。对于PWM整流器存在的功率耦合问题,可以采用功率前馈解耦控制策[7]加以解决。虽然功率控制策略的改进可以提高整流器的性能,但是由于整流器自身的非线性特性,仍然不能达到理想的控制状态。对于非线性控制策略的各种控制方法,包括反推非线性控制、内模控制、无源控制理论等可以抑制系统的非线性对控制器产生的影响,是解决非线性问题的有效途径。无源控制在逆变器和电机控制中开始应用研究,控制效果较为明显。
本文从系统的能量着手,采用无源控制器设计来解决整流器自身的非线性问题,同时将该整流系统用于城轨牵引供电系统,达到再生制动的目的[8],用该控制策略下的整流器代替现行的整流机组。首先推导出整流器的欧拉拉格朗日数学模型,设定出系统的能量函数[9-10],采取功率解耦控制策略,并注入阻尼加快系统响应,开关的调制方式采用电压空间矢量(SVPWM)简化调制方式进行展开。
1 三相PWM整流器数学模型
本文选择三相电压型整流器(VSR)为研究对象,对其进行控制。其拓扑结构如图 1,ea、eb、ec为A、B、C三相对称电源相电压值,ua、ub、uc为整流器三个桥臂的输入端相电压,ia、ib、ic为三相输入线电流。L、R构成滤波电抗器。sk、s′k为开关函数,其中 k=a,b,c,开关管可以为 IGBT,GTO等,为整流器输出侧电容,所加负载用RL表示,系统的数学模型建立前需做以下假设:
(1)滤波电抗器不存在饱和现象;
(2)开关无损耗;
(3)整流器供电电源为对称三相正弦电压。
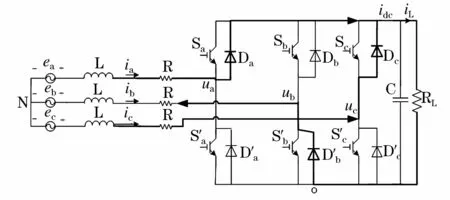
图1 三相电压型PWM整流器拓扑结构Fig.1 Topology structure of three-phase voltage source PWM rectifier
2 无源性功率控制策略
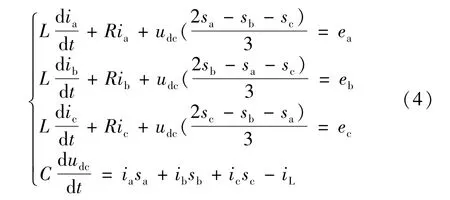
根据基尔霍夫电压定律,由图1可得电压型PWM整流器在abc静止坐标系下的微分方程如式(1)所示。

VSR桥臂输入三相电压表示成式(2)。

根据三相对称系统回路电压和与节点电流和均为零,结合式(1)、式(2)可得式(3)。

则式(3)代入式(1)得式(4)。
通过等量变换矩阵:
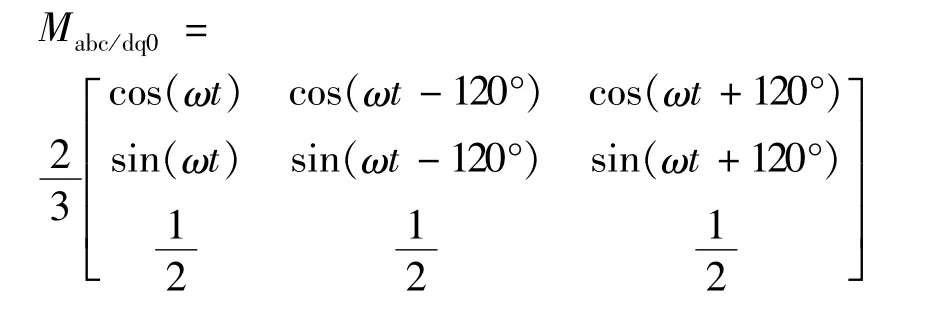
可得VSR在dq坐标系下的数学模型为式(5)。

将式(6)写成EL方程形式如式(7)。

其中:

式中M为正定对角阵;J为反对称矩阵;R为正定矩阵,反应了系统具有耗散性。
根据系统的物理特性,设系统的能量存储函数如式(8)。

对式(8)求导得式(9)。

则另Q(x)=xTRx,根据无源系统无源性的判定依据[9-11],可以证明整流器是严格无源系统。
2.1 无源控制器设计
VSR稳定运行时,期望功率因数为1,输出稳定的期望值电压uDCR,期望平衡点表示为:
系统处于平衡状态时,交直流功率平衡,则系统消耗的有功功率为Pref,其表达式如式(10)。

计算可得:

设系统的误差能量函数如式(12)所示。

设计的控制器实现功率解耦控制的同时,也能进一步实现系统的快速响应,在此引入注入阻尼Ra,系统满足式(13)。

将式(13)代入式(7)得式(14)。

由式(14)明显可以看出,选取的控制规律为:

从而等式左侧M xe+J xe+Rdxe=0,因此:He=
将控制规律代入式(6)得式(17)。

由式(17)可知,耗散项选择较大,系统时间常数较小的情况下可使系统很快稳定在期望平衡点。图2为无源功率控制规律(16)在城轨牵引供电系统中,对基于EL模型的三相电压型整流器无源性功率控制的原理图。

图2 基于EL模型的无源性功率控制原理图Fig.2 Schematic diagram of passive power control based on EL Model
3 仿真实验
选取三相电压型PWM整流器的参数如下:三相电源相电压220 V,f=50 Hz,网侧电感L=22 mH,其等效的阻值R=1Ω,直流侧电容C=2 000μF,负载RL=50Ω,直流侧期望电压uDCR=750 V,发生负载扰动的扰动电阻值与负载阻值取值相同,调制方法采用SVPWM,调制频率为2 kHz,采用Simulink中Sim-PowerSystems模块实现。电网不平衡条件选择电源具有π/6的初相角的工况,Ra=50Ω。根据式(16)无源控制律对控制系统进行仿真验证,得到三个条件下的仿真结果。
无负载扰动时,整流器仿真结果如图3所示。
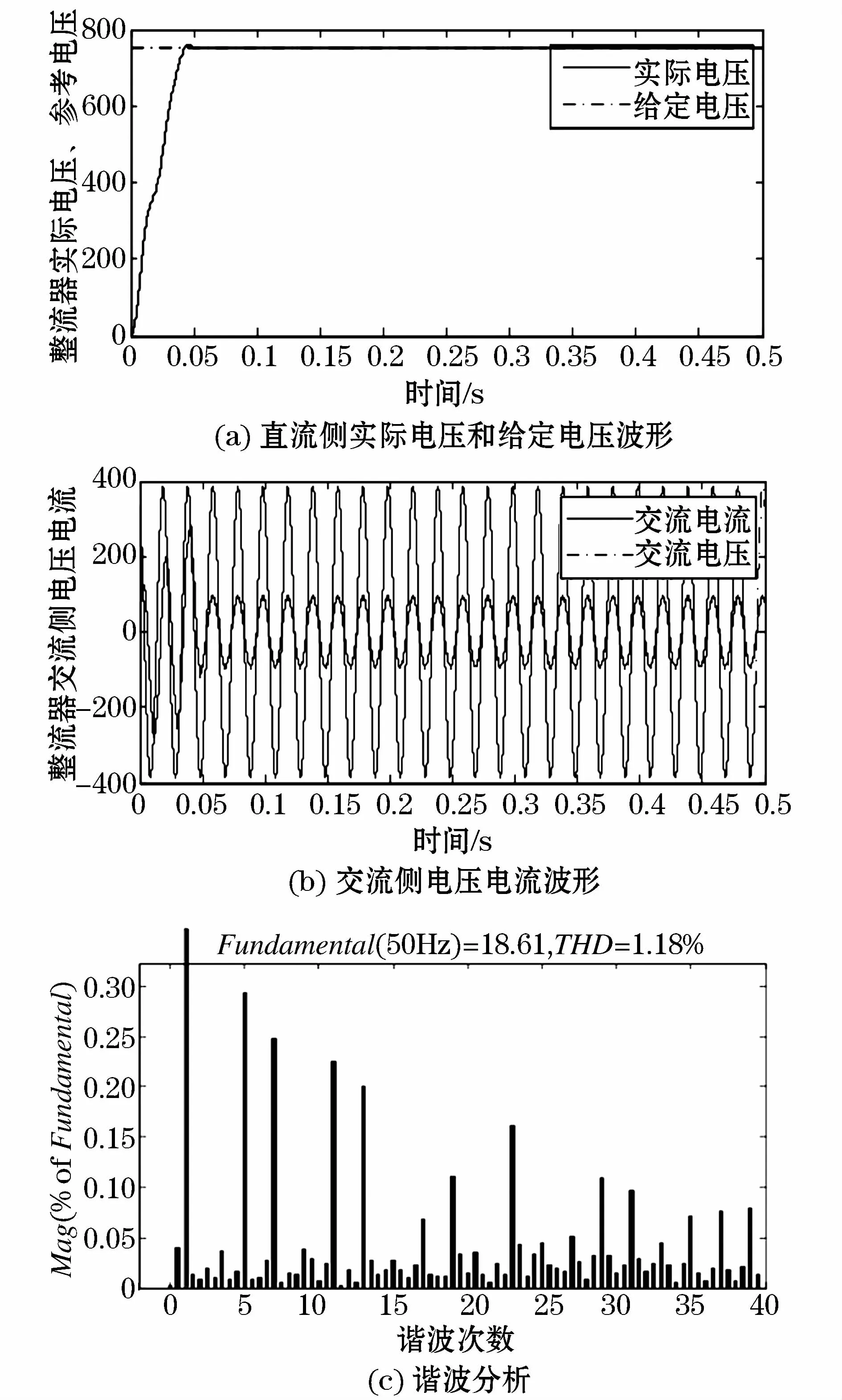
图3 无负载扰动时的整流器仿真结果Fig.3 Rectifier simulation resultswithout load disturbance
从图3可以看出,无源控制下,整流系统0.05 s进入稳态,输出稳定的电压值750 V,与给定电压相同。系统稳定后,交流侧电压和电流同频同相,交流侧电流总谐波畸变率为1.18%,谐波含量较低。
0.2 s时系统并入50Ω负载,仿真结果如图4所示。

图4 负载扰动仿真结果Fig.4 Simulation results of load disturbance
由图4可见,系统0.2 s并入50Ω负载,即使有负载扰动,系统也能具有较快响应,重新稳定所需时间为仅为0.03 s。系统稳定后交流侧电压和电流依然同频同相,可以满足单位功率因数整流,系统谐波畸变率为1.08%,THD仍然较小。
图5是负载侧接反电动势仿真结果,包括交流侧电压和电流波形以及功率因数变化,城轨牵引供电机车制动时会引起接触网(轨)电压升高,不可控整流需要布置能量吸收装置,其中电阻制动作为解决接触网(轨)电压升高的措施会造成能量的浪费。在仿真模型建立时,直流侧并上800 V的直流电源代替机车制动引起的电网电压升高,0.2 s时投入该直流电源,此时交流侧输出的电压和电流是同频反相的正弦量,如图5(a)所示。逆变时的功率因数为-1,如图5(b)所示,从而可以看出能量可以双向流动,机车制动产生的能量可以反馈到电网,整流器能实现单位功率运行。
电网不平衡条件下,谐波含量仅为1.15%,如图6所示,依然满足牵引供电系统要求。

图5 负载侧接反电动势仿真结果Fig.5 Simulation results of load side with back electromotive force
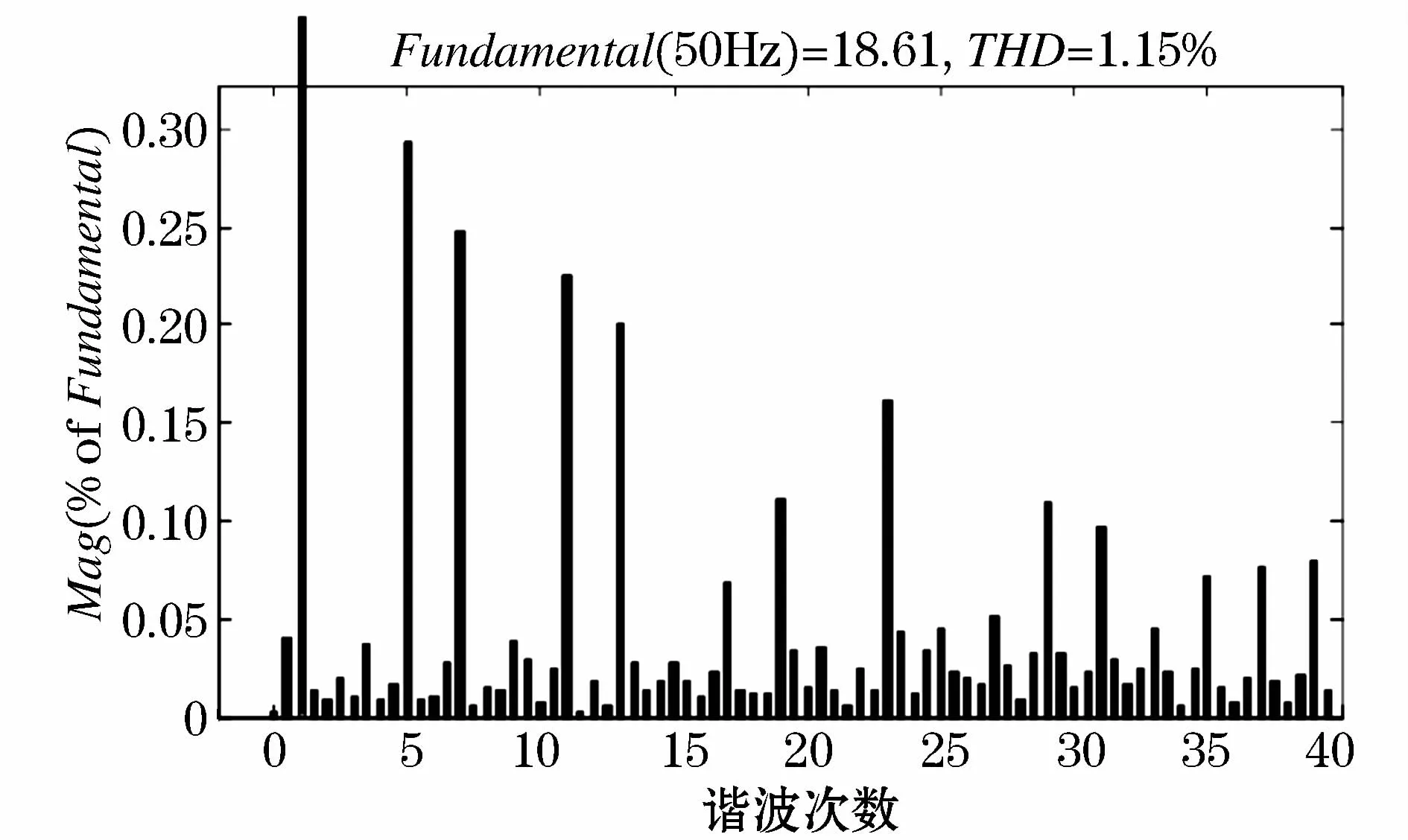
图6 电网不平衡条件下谐波含量Fig.6 Harmonic content under unbalanced power grid conditions
4 结束语
本文根据电压型PWM整流器的拓扑结构,通过电路原理知识以及相应的坐标变换,推导出整流器在dq坐标系下的数学模型,并根据整流器无源性推导了其EL功率数学模型。通过确定系统的功率期望平衡点,设定系统的误差能量函数,通过阻尼注入方法进行了无源控制器设计,推导了相关的无源控制规律,进而搭建了无源控制的仿真模型。仿真结果表明无源控制策略在无负载扰动、机车制动、电网不平衡条件下能够保持功率快速响应,能量双向流动,直流侧输出稳定的电压,谐波含量少,单位功率因数整流等特性。因此该控制策略下,PWM整流器具有很好的控制效果,该控制策略在城轨牵引供电应用上具有一定的参考价值。