ANC系统次级通道背景噪声的处理方法*
2017-01-10杨鹏应黎明陈敏王晋伟王国栋
杨鹏,应黎明,陈敏,王晋伟,王国栋
(1.武汉大学电气工程学院,武汉430072;2.国网常德供电公司,湖南常德415000)
0 引 言
电力变压器的有源降噪系统(ANC)是根据惠更斯原理,通过声波相互抵消来达到降噪目的。基于自适应控制算法的有源降噪系统,将次级通道传递函数运用到控制算法的系数更新过程中,因此,需要对次级通道参数进行辨识,辨识精度影响着控制系统的稳定性以及收敛速度等性能指标。如何精确的辨识次级通道是自适应有源噪声控制系统的关键问题之一。
次级通道辨识方法主要有两种,即离线辨识和在线辨识。离线辨识主要应用于次级通道特性基本保持不变或变化缓慢的情况,具有控制算法简单,收敛速度快,辨识精度高等优点。在线辨识能够跟踪次级通道特性的变化,为控制算法提供实时准确的次级通道参数,具有很大的实用性,但是算法运算量大,收敛速度慢。用于变电站的有源降噪系统在运行时传感器等设备位置基本固定,控制系统结构几乎不会发生变化,而声通道温度、气压等变化对次级通道产生的误差甚微。所以对次级通道进行离线辨识即可满足控制系统的要求。
上世纪末,L.J.Eriksson提出附加白噪声的方法对次级通道进行在线辨识[1],此方法能够适应次级通道的变化为控制系统提供比较准确的次级通道参数。但是当背景噪声与辨识子系统激励信号有频段相近或重合时,辨识参数误差明显增大,甚至会出现不收敛的情况。为解决此问题,M.Zhang提出了一种能够将背景噪声信号与辨识系统信号隔离的方法[2],此方法能够有效消除背景噪声的影响,但是该方法控制结构复杂,计算量大,应用范围窄。文献[3-5]中,提出几种无次级通道模型算法。这些算法都试图避开次级通道参数问题,直接对目标函数进行优化,但是都存在计算量大,算法稳定性差,不收敛等问题。
本文通过总结次级通道辨识误差来源,针对变电站电力设备运行的实际工况,采用分时测量法与信号相关性分析结合的方法抑制背景噪声的影响。通过仿真证明本文所提方法能够高效抑制变电站背景噪声对次级通道辨识参数的影响。
1 次级通道及其对控制性能的影响
1.1 次级通道的组成
随着电子元器件的发展,变压器有源降噪系统经历了模拟电路和数字自适应电路两个阶段。采用数字自适应电路的变压器有源降噪控制系统如图1所示。

图1 变压器有源降噪系统框图Fig.1 Block diagram of ANC system
次级通道就是次级声信号的传播途径,由图1可得,变压器有源降噪系统次级通道的组成以D/A转换器为起点,包括重构滤波器,功率放大器,次级电声器件,声空间,前置放大器,抗混叠滤波器,A/D转换器。次级通道参数辨识,即辨识该物理通道的传递函数。
1.2 次级通道辨识误差的来源
在对次级通道参数进行辨识时,所采用的辨识模型、控制算法、物理元件、所处环境等存在各种不确定性。这必将引入辨识误差。现将这些误差的来源归纳为四个方面:(1)辨识模型原理上的误差。在线辨识与控制系统同时工作,不可避免会有各种背景噪声出现,辨识系统不能实现绝对的信号独立,所以辨识结果必然不能反映次级通道本身特性;(2)辨识时建立模型的限制。在实际系统中,对参考信号以及误差信号的响应是无限长的,但是建模使用的FIR型滤波器的阶数是有限的;(3)建模采用的FIR型滤波器的权系数自身噪声对其稳态特性的影响;(4)次级通道参数的时变性。电声器件以及传感器的传递函数是不断变化的,次级声源与传感器的相对位置的变化以及系统结构的变化,都会导致次级通道传递函数发生变化。
1.3 次级通道辨识误差对控制系统的影响
取参考信号为单频率正弦信号,自适应滤波器的输出信号y(n)与误差信号e(n)之间的关系如下所示[6-7]:

式中ω0为输入信号的频率;φ为次级通道滤波器在频率 ω0的相移;是算法收敛步长;L为滤波器阶数。
因此,ANC系统的传递函数可以表示为:
若算法收敛速度足够慢,即μ→0会造成β→0,则次级通道的动态特性不需要考虑。假设则(z)可以完全由幅度β和相位φ来决定。式(2)可以改写成:

对二阶系统而言,可以由传递函数的极点位置判断出系统是否稳定。求解式(3)的极点可知,H(z)有共轭极点,半径是:

式(4)表明,因为 β恒大于0,只要满足 cosφ小于0的条件,系统的极点半径就会大于1,可见系统的稳定条件为:

即只有在次级通道辨识的相位误差绝对值在90°的范围内,控制系统才会收敛。对于参考信号为宽带噪声信号的情况结果一致。
式(5)给定了降噪系统保持稳定的理论条件,但是综合考虑收敛速度,相位能允许的辨识误差范围更加小,并且收敛步长与相位辨识误差之间存在反相关关系。以基于Fx-LMS算法的控制系统为例[8],证明如下:


理想情况下,能将式(7)变成:

式中 A=E[d(n)X(n)]、B=E[X(n)XT(n)]。
令 V(n)=W(n+1)-W(0),V'(n)=Q-1V(n)=QTV(n)(其中Q是自相关的正交矩阵,满足Q-1=QT),使用标量形式,于是第i个分量使得下面关系成立。

当n→∞时,要使得式(9)收敛,则:

于是,可得Fx-LMS收敛系数μ必须满足:

式中φ表示次级通道参数辨识的相位误差;λi表示参考输入信号的自相关矩阵之第i个特征值。式(11)表明:假设次级通道传递函数辨识的相位误差与幅度误差是 φ与则 Fx-LMS收敛系数 μ和成反比,和 cosφ成正比。文献[6]中证明相位误差在45°以下时对收敛步长影响不大,而当相位误差超过70°以后,将严重影响收敛步长的取值。这种情况下,系统不得不用一个很小的收敛步长来稳定控制算法,这严重降低了控制算法的收敛速度。
2 背景噪声的处理
目前,消除背景噪声一般采用同步测量法和分时测量法。分时测量操作简单,精度准确,可以运用到离线辨识背景噪声的处理过程中,但是需要解决背景噪声与待测信号频段相近或重合的问题。分时测量法是指在同一位置,在辨识系统投入运行前,使用传感器在t1时刻测得背景噪声信号,然后在t2时刻打开辨识系统,测得包含背景噪声在内的混合信号,对两种信号做频谱分析,两个时刻的频谱相减即可抵消背景噪声的影响。显然,这一方法必须保证在同一位置两次测量的背景噪声相同,即背景噪声属于时间平稳信号。
对变电站而言,其设备绝大多数时间运行在正常状态,所发噪声相对平稳,但是会掺杂突发短时的放电噪声和频段与待测信号重合或相近的噪声[9]。这类噪声不能简单滤波去除。
本文提出对背景噪声信号与待测声信号进行相关性分析,找出与待测信号与背景噪声信号频段重合部分,然后用分时测量法去除背景噪声的影响。互相关函数是描述两个信号x(t),y(t)在任意两个不同时刻t1、t2的取值之间的相关程度。两列信号x(t)和 y(t)的互相关函数的定义为:

式中T为计算相关性的时间长度;τ为两列信号间的时间间隔。当两列信号的频率相同时,设x(t)=a·sin(ωt+φ),y(t)=b sin(ωt+φ-θ),则互相关函数为:

可见,两列具有相同频率的周期信号的互相关函数也是周期信号,并且频率不变,保留了原信号的幅值和相位差,但是丢失了初相位。当两列单频信号的频率不相同时,得到的互相关函数为0,即两列单频信号来自不同的信号源。
式中m和n分别是信号x(t)和y(t)的组成频率的个数;k为两列信号中频率相同的频率个数;ωs为两列信号相同的频率成分;as和bs分别是相同频率成分的幅值。可见,多频混合信号的互相关函数也是混合频率信号,且只保留了两列信号中频率相同部分的频率、幅值和相位差信息;频率不相同的周期成分不会影响互相关函数的取值。因此,在得到两列信号的相关函数之后,对其进行傅里叶变换,就可以得到两列信号的相关的频率段。
因此,在相关性分析的基础上,可以区分出含有背景噪声的混合信号中与激励信号相关的频率成分,再利用分时测量法可除去频段不相关的背景噪声。
3 仿真实验
为模拟变电站次级通道辨识的实际运行情况,采用某110 kV变电站的实测噪声信号,将其作为背景噪声加入辨识过程。首先对实测的变电站噪声信号进行频谱分析[10-11]。频谱特性如图2所示。由图可见,变电站的噪声频率主要集中在100 Hz~500 Hz处。为避开背景噪声的集中频段,便于与背景噪声低频段分离,辨识所发的激励信号取1 400 Hz的正弦信号,幅值与变电站背景噪声幅值数量级一样,因为收敛步长与输入信号的功率成反比,因此此处的收敛步长取值较大u=10,采样频率fs=3 000 Hz,在自适应滤波器的输出信号中叠加背景噪声信号,使其进入到辨识过程中。

图2 变电站噪声信号频谱图Fig.2 Frequency spectrum of transformer noise signals
首先不进行背景噪声处理。辨识信号直接加在误差传感器的拾取信号中,得到的输入、输出波形以及辨识误差波形如图3所示。
由图3可知,辨识的误差信号有逐渐收敛到0的趋势,但是误差信号波动较大,而且次级通道的输出信号已经不再是正弦信号。其原因是在辨识过程中将误差传感器拾取的背景噪声信号当作是激励信号的一部分,使辨识的输出信号为实际激励信号与背景噪声信号的叠加信号,这种情况下的辨识的结果不能反映次级通道本身的特性,因此需要对声信号进行去除背景噪声的处理。
采用上节所述方法进行去噪处理,得到的还原结果图4~图6所示。
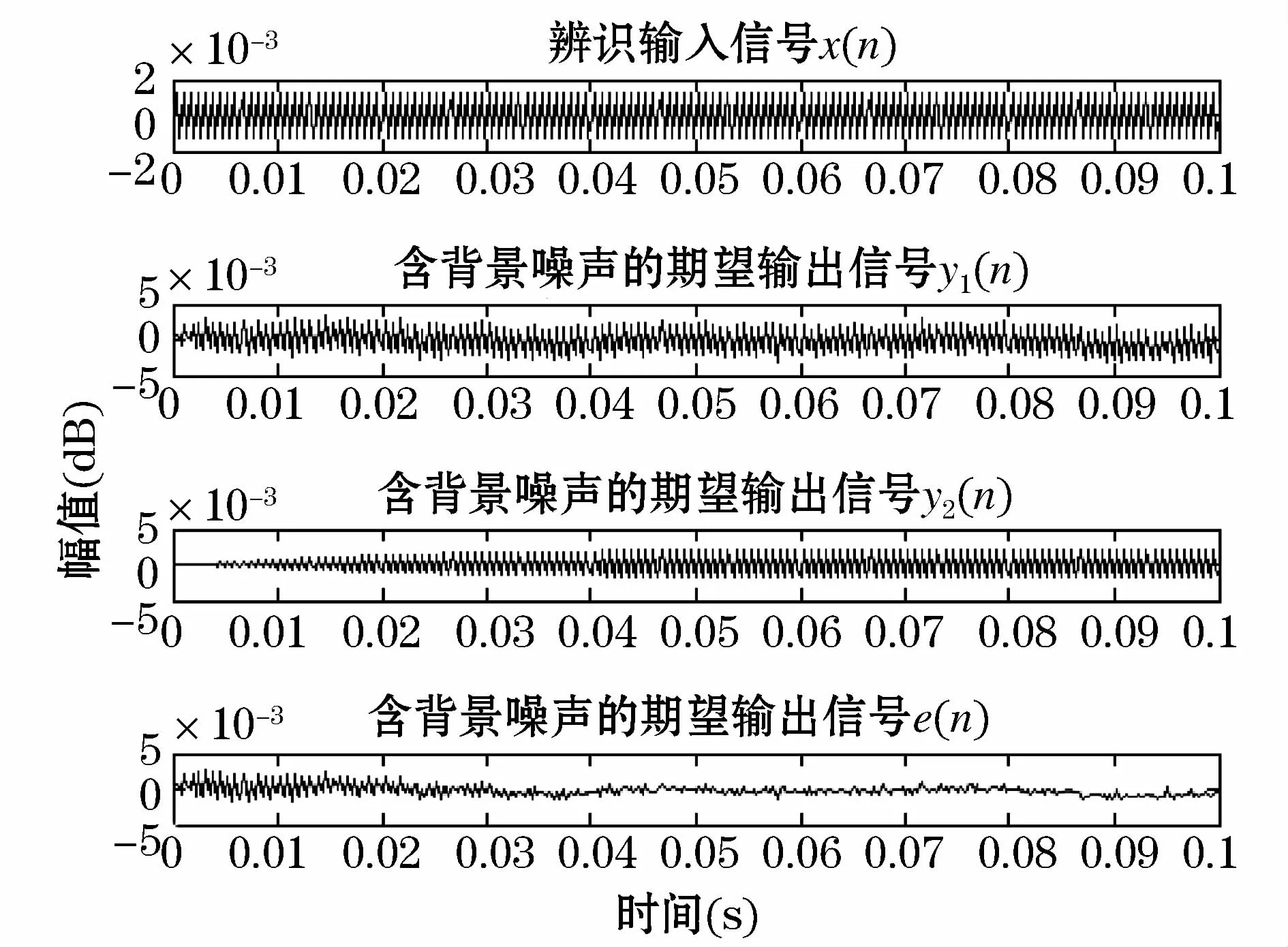
图3 含有背景噪声的仿真图Fig.3 Simulation diagram with background noise
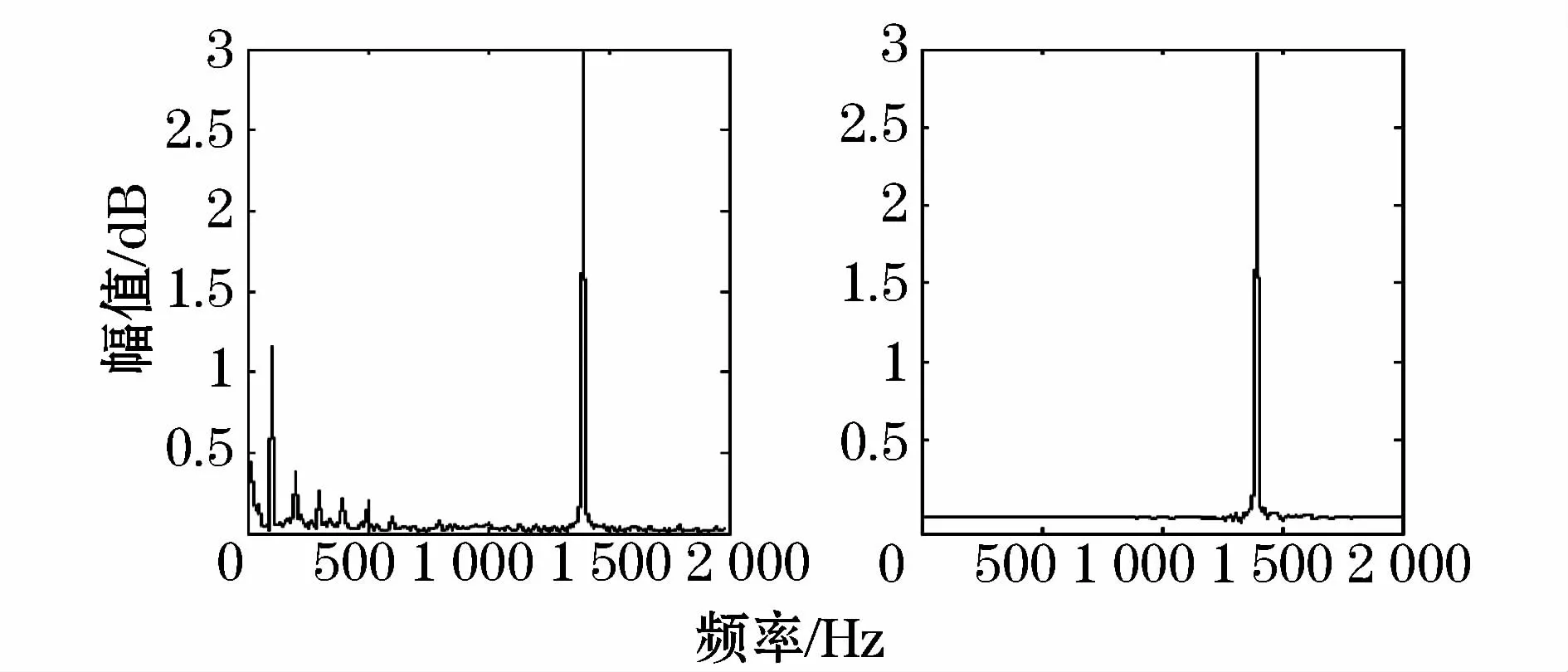
图4 去背景噪声信号处理图Fig.4 Spectrum ofmixed signals and after removing the background noise

图5 去除背景噪声后的仿真图Fig.5 Simulation diagram after removing background noise
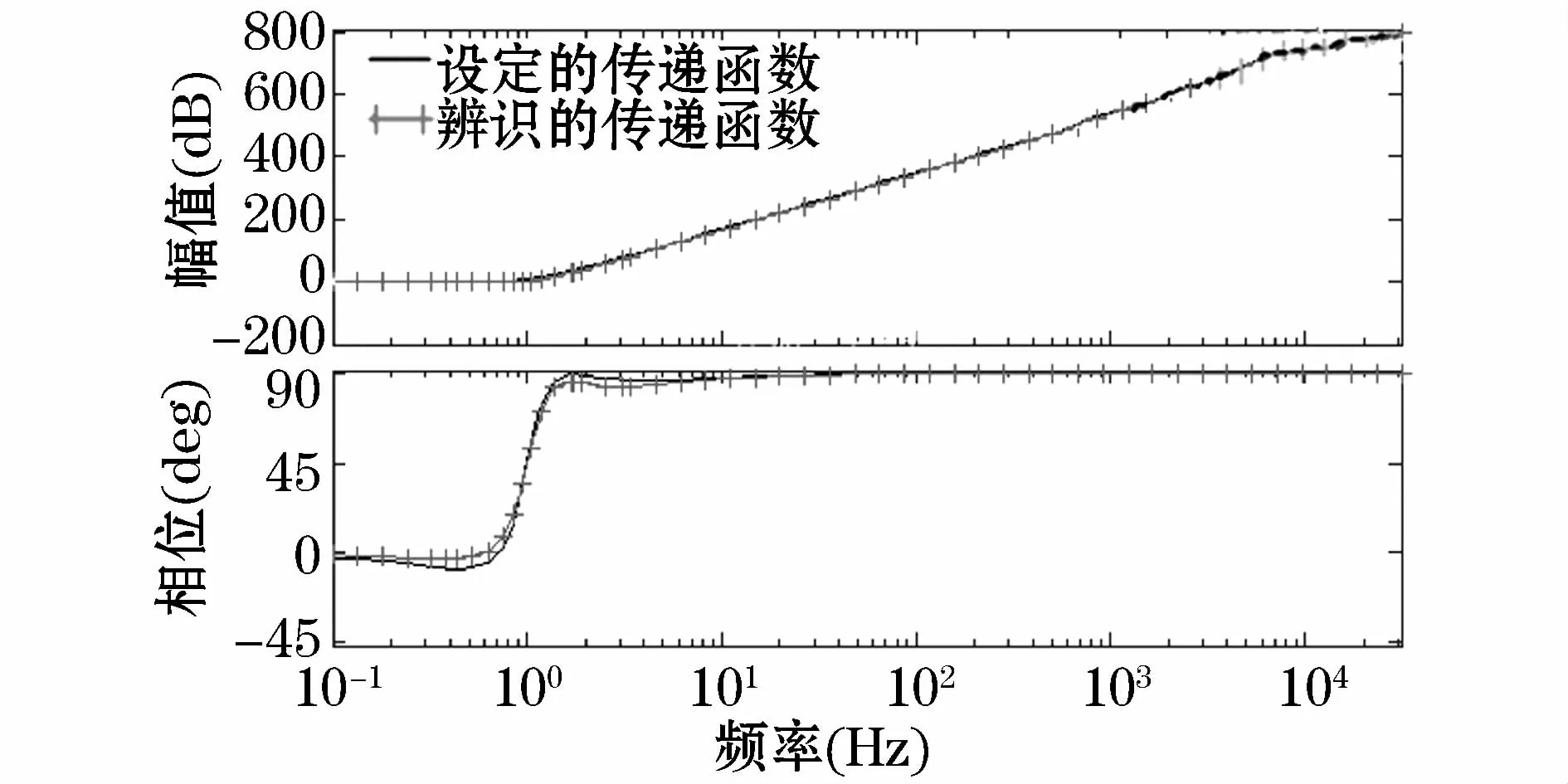
图6 次级通道传递函数设定值与辨识值特性图Fig.6 Frequency characteristics diagram of identification and setting of transfer function in secondary path
由图4可见,混合信号的频谱中,除了所发的1 400 Hz的激励信号外,还有很多其他频段的声信号,其中低频信号幅值较大,但是采用上节所述方法去噪后,其余频率的背景噪声已基本去除,从图5可以看出,还原出来的响应信号接近正弦信号,它与期望信号的误差信号的数量级在10-18,与信号本身幅值相差15个数量级左右,误差可以忽略不计,辨识误差信号在0.06 s左右可靠收敛。由图6可见,在1 Hz~104 Hz之间,辨识出的传递函数的频率特性与设定的传递函数的频率特性基本重合。
4 结束语
(1)总结归纳了次级通道辨识误差的四个来源,基于Fx-LMS算法分析辨识误差对控制系统收敛系数的影响。其收敛系数与次级通道传递函数相位误差的余弦成正比,与幅值误差成反比;
(2)根据电力变压器有源降噪系统实际运行工况下次级通道平稳的特点,在离线辨识的基础上,采用分时测量法与信号相关性分析相结合的方法抑制背景噪声的影响。仿真证明本文方法的有效性。