一种基于行星齿轮箱复合运动的故障诊断指标
2017-01-10王科盛左明健
王 况, 王科盛, 左明健,2
(1. 电子科技大学 设备监控与健康管理研究所,成都 611731; 2.阿尔伯塔大学 机械工程系,埃德蒙顿,加拿大)
一种基于行星齿轮箱复合运动的故障诊断指标
王 况1, 王科盛1, 左明健1,2
(1. 电子科技大学 设备监控与健康管理研究所,成都 611731; 2.阿尔伯塔大学 机械工程系,埃德蒙顿,加拿大)
行星齿轮箱广泛应用于风力发电、航空、船舶等大型工程机械中,恶劣的工作环境使得其中的关键部件容易出现严重的磨损或疲劳断裂等故障。现有的故障诊断方法大多在时、频域中对信号进行处理,然而由于行星齿轮箱振动响应信号频率成分的复杂性和故障传递路径的时变特性,使得传统的针对定轴转动齿轮系统的故障诊断方法很难有效的对行星齿轮箱进行故障诊断;抓住行星齿轮系统复合运动的突出特征,结合故障振动传递路径的时变特性,提出了一种基于故障运动特征的潮汐频率特征指标对行星齿轮箱进行故障诊断。通过对行星齿轮箱太阳轮局部故障的振动数据分析,验证了潮汐频率指标的存在,分析了潮汐频率作为行星齿轮箱故障诊断指标的优势和前景。
行星齿轮箱;潮汐频率;故障诊断
行星齿轮传动系统由太阳轮、行星轮、行星架和齿圈组成,当考虑齿圈固定不动时,行星轮绕着自身转轴自转,同时还绕着太阳轮公转,并且和太阳轮、齿圈同时啮合,是典型的复合运动。因此,行星齿轮箱的振动响应比定轴齿轮箱更加复杂,相应的故障诊断过程也具有其独特的特点和难点[1]:由于自身机械结构的复杂性和各齿轮的复合运动特点,使得故障传递路径呈现时变特性并导致频率响应十分复杂、故障响应微弱。
目前,研究人员在不断探索有效的行星齿轮箱故障诊断方法,主要的研究手段集中在对其振动信号的时域、频域或时频域中的分析:如YIP[2]利用时域同步平均技术对行星齿轮箱时域振动信号进行处理,然后从处理后的数据中提取出健康指标来对行星齿轮箱进行故障诊断;MARK等[3]提出了一种简单的频域方法,减弱了传感器安装位置以及行星齿轮箱自身复杂的传递路径引起的振幅变化对故障诊断段的影响;雷亚国等[4]提出了一种新的自适应总体平均经验模式分解方法,并将该方法应用在行星齿轮箱故障诊断中,明显提高了行星齿轮箱的故障诊断能力。
由文献[5-9]可知,行星齿轮箱故障诊断的关键是识别出行星齿轮箱的各齿轮故障频率及其幅值变化。现有的可以用来对行星齿轮箱进行故障诊断的特征频率一般为啮合频率(啮合频率同时存在于各个行星轮与太阳轮之间,以及各个行星轮与齿圈之间)、行星架旋转频率、太阳轮旋转频率、太阳轮故障频率、行星轮故障频率、齿圈故障频率,这些频率由于行星轮系的复合运动特点,以及振动传递路径的时变特性,使得状态监测过程收集到的振动信号十分复杂,特别是当轮系中主要部件出现故障,动态变化着的行星轮系导致行星齿轮箱故障诊断的难度大大增加。与传统定轴齿轮箱相比较,造成行星齿轮箱监测数据难于分析的最大难点就是动态变化的行星轮系及其导具有时变特性的振动传递路径。因此,为了有效地实现行星齿轮箱系统的状态监测和故障诊断,十分有必要从行星齿轮箱运动特点入手,深入研究和探索具有行星齿轮箱特点的故障特征成分。
通过对行星齿轮箱运行动态过程中振动信号传递路径以及行星架通过效应的研究,提出了潮汐频率指标,它是一种基于行星齿轮箱故障运动特点的特征指标,考虑传递路径调幅和行星架的通过效应调幅共同作用而产生的频率成分。经对行星齿轮箱太阳轮局部故障实验信号的分析,验证了潮汐频率的存在并讨论了其在行星齿轮箱故障诊断中的能力。
1 行星齿轮箱振动分析
在行星齿轮箱工作过程中,当太阳轮或行星轮有故障时,数据采集传感器的位置与齿轮故障部位啮合点的相对位置随着系统的运转而不断发生着远近的变化。齿轮故障部位产生的啮合振动信号随着振动传递路径的远近而具有了时变特性,这是行星齿轮箱复杂复合运动的结果。因此,传感器收集到的振动信号会因为故障振动信号传递路径的变化而产生调幅作用,传递路径对行星齿轮箱的故障诊断会产生巨大的影响。
冯志鹏等分析了行星齿轮箱分布式故障下的振动信号的组成成分,并且讨论了行星轮的通过效应产生的振动信号调幅作用:当行星架旋转一周时,所有的行星轮各自将通过传感器安装位置一次,如果行星齿轮箱有N个行星轮,将对采集到的振动信号产生N次调幅作用,这种调幅作用会产生N倍于行星架转频的振动频率。
如果继续深入的讨论行星齿轮箱传递路径对振动信号的影响,行星齿轮箱的太阳轮或行星轮发生故障时,故障振动信号一般会经过3条传递路径到达传感器(见图1)。

图1 信号传递路径[6]
路径1:故障振动信号由啮合点产生经过行星轮直接传递到齿圈,然后由箱体传递至传感器;
路径2:故障振动信号由啮合点产生通过太阳轮传递至太阳轮轴和太阳轮轴支撑轴承,再通过箱体传递至传感器;
路径3:故障振动信号由啮合点产生通过行星轮传递至行星轮轴和行星轮支撑轴承,再通过行星架、行星架轴、行星架轴承和箱体传递至传感器。
其中,路径2、路径3相对于传感器的距离不会随着行星齿轮箱的旋转而变化,而路径1会对行星齿轮箱的振动信号产生调幅作用。并且经过该路径传递的振动信号没有经过轴承等零部件的振幅削弱作用,包含更清晰更直接的故障信息。因此,应该对该路径的振动信号进行深入的研究。
1.1 潮汐特征频率
以太阳轮局部故障为例,图2为路径1在行星齿轮箱运行的不同阶段故障位置的示意图。图中太阳轮上黑点处表示太阳轮该处发生了故障,见图2圈中位置处。
由路径1可知,当太阳轮的其中一个轮齿发生故障时,故障信号经由和故障点啮合的行星轮传递到齿圈,再传递到传感器上。考虑行星轮的公转特点,当太阳轮旋转到图2(a)所示位置时,故障点经过行星轮至传感器的距离最短,信号衰减最小,产生的振动信号最强;当太阳轮继续旋转,到达图2(b)所示位置时,传递路径的长度渐渐变长,信号衰减变大,产生的振动信号变弱;当太阳轮旋转到图2(c)所示位置时,故障位置与传感器距离最远,该种情况的传递路径最长,信号衰减最多,产生的振动信号最弱。不难发现,当太阳轮发生故障,行星轮围绕其公转时,不但会产生通过效应,而且还会产生故障啮合过程振动的振幅和相位的时变特性,这一时变特征是由于行星齿轮箱特殊的运动过程以及传感器位置与故障啮合点间时变的传递路径而引起的。这个振幅和相位的时变特征是太阳轮故障信号的根本属性之一,定轴齿轮传动没有这一特点,捕捉到这个时变特征将会成为太阳轮故障诊断的特有指标。

图2 路径1随时间的变化
行星齿轮箱在旋转的过程中,太阳轮和行星轮的位置由图2(a)经图2(b)到图2(c),最后再回到图2(a),不断的循环。因此,由该传递路径产生的故障调幅信号具有周期性。只有在太阳轮故障轮齿、行星轮、传感器位于一条直线上时,如图2(a)所示,该调幅振动信号才会出现最大。此时,故障啮合点与传感器位置以及传递路径同时达到了最近。值得注意的是,这个最明显的位置,需要太阳轮要达到此位置,必须旋转过正整数圈。而行星轮只需要其中一个在太阳轮旋转到图2(a)所示位置时到达最顶端就可以了。这个效应非常相似于潮汐的周期特性,必须等到地球(太阳轮)和月亮(行星轮)在一条直线上时才会潮汐最大,因此而产生了潮涨潮落,故此,本文将此种行星齿轮箱故障特征,命名为潮汐特征频率。值得注意的是,潮汐特征频率成分不是单纯由行星齿轮箱的结构特征所决定的,而是轮齿发生故障以后轮系复合运动的结果,因此,是一种区别于传统特征频率的新指标。
1.2 太阳轮局部故障潮汐特征频率
假设太阳轮旋转频率为
fn=n(t)/60
(1)
式中:n(t)为行星齿轮箱太阳轮转速,单位为r/min,该转速可随时间变化。
则行星架的旋转频率为
(2)
式中:Zs为太阳轮齿数,Zr为齿圈齿数。(本文只讨论齿圈固定的行星齿轮箱形式)
假设太阳轮旋转k1圈后,其中一个行星轮恰好到达最顶端,此时共有k2次行星轮经过了最顶端。根据太阳轮和行星架用的时间相同,可得
(3)
式中,N为行星轮个数。
整理得
(4)
k1、k2为符合条件的最小正整数。
由式(4)可以看出,在行星齿轮箱中,根据已知的太阳轮、齿圈齿数和行星轮个数,就可以求出采集到的故障信号最强时太阳轮旋转的圈数,进而得到行星齿轮箱太阳轮局部故障时潮汐特征频率。由于太阳轮旋转k1圈才出现一次潮汐现象,因此,潮汐频率为:
(5)
1.3 行星轮局部故障时潮汐特征频率
如果为行星轮局部故障,则只有当该故障行星轮运行到传感器所在位置并且故障齿正好和齿圈啮合时才会采集到振幅最大的信号。
假设当故障行星轮和齿圈啮合m次时,产生了一次潮汐现象,由于只有当行星轮故障齿与齿圈啮合时才会产生潮汐现象,m应为行星轮齿数Zp的正整数倍。
此时,行星架也应该旋转了正整数圈,即mfc/fm为正整数。
行星轮和齿圈啮合m次的时间
t=m/fm
(6)
则潮汐特征频率为
(7)
式中:fm为行星齿轮箱的啮合频率。
如果已知输入轴太阳轮的旋转频率,则啮合频率为
(8)
潮汐频率为
(9)
2 实验分析
2.1 实验说明

1.电机 2. 脉冲传感器 3. 行星齿轮箱 4. 加速度传感器5.直齿齿轮箱 6. 负载施加装置
本实验数据采集于电子科技大学设备监控与健康管理研究所动力传动故障诊断综合实验台(DDS),实验平台见图3,行星齿轮箱参数见表1。为了模拟行星齿轮箱太阳轮局部故障,在太阳轮其中一个轮齿上加工了一个半齿断齿,见图4。实验过程中,考虑采集到的振动信号的强弱以及传感器安装的难易,在行星齿轮箱的顶部安装了加速度传感器,采集行星齿轮箱的振动信号,见图3中“4”处;在驱动电机处安装了脉冲传感器,采集输入轴转速脉冲,见图3中“2”处。电机的转动频率设置为50 Hz,即太阳轮的转速为3 000 r/min,共运行2 s。行星齿轮箱的各个特征频率见表2。考虑到最大观测频率以及设备实际情况,将采样频率设为30 720 Hz,采集无故障齿时行星齿轮箱的信号和太阳轮有一个断齿时的振动信号。
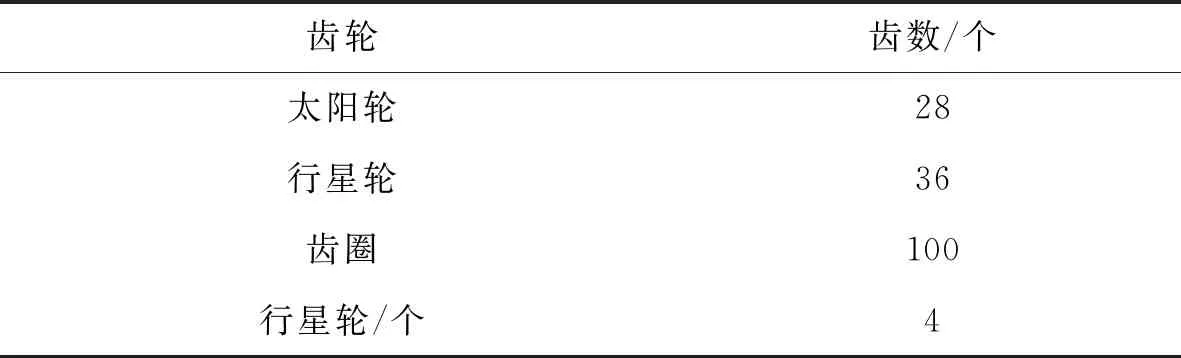
表1 行星齿轮箱参数
由式(4)可得:
因为k1、k2为符合条件的最小正整数,则k1=8,k2=25。
由式(5)可得

表2 行星齿轮箱特征频率

图4 断齿太阳轮
2.2 行星齿轮箱振动信号分析
图5为行星齿轮箱匀速运行过程中采集的时域振动信号,其中图5(a)为正常太阳轮运行过程,图5(b)为断齿太阳轮运行过程。对比图5(a)、图(b)可以发现,在图5(b)中明显出现了振幅调制的成分,并且调幅后产生了多种不同大小的振幅,这些调幅成分具有明显的周期性。
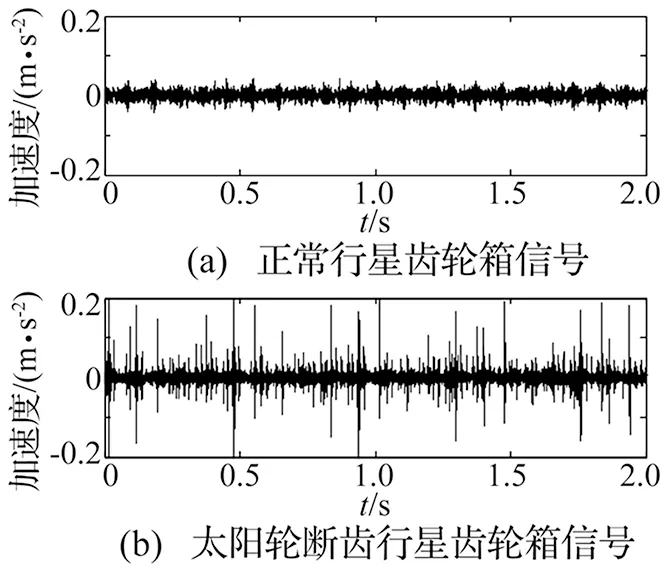
图5 行星齿轮箱时域振动信号
图6为行星齿轮箱匀速运行过程时域振动信号包络分析后的包络谱。在图6(b)中可以清晰的发现太阳轮旋转频率成分fH、太阳轮故障频率成分fX、行星架旋转频率成分fC以及潮汐频率等成分fL,并且还有很多边频带成分出现,这些成分和理论分析的成分十分吻合(见表2)。
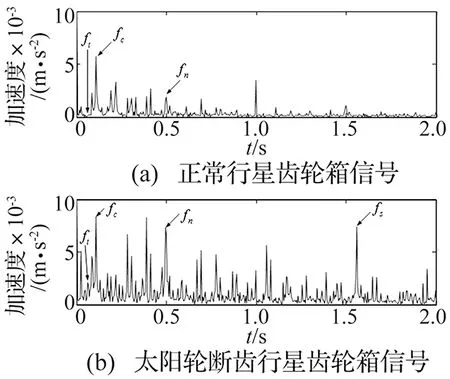
图6 行星齿轮箱时域振动信号包络谱
由图6(b)可以发现,潮汐频率成分并不明显,这是由于潮汐频率是故障点产生的振动经过复杂的传递路径后采集到振动,信号经过了衰减,会变得比较微弱。但是潮汐频率是行星齿轮箱故障动态运动变化的重要特征,是区别于以往的“静态”故障特征频率(例如太阳轮故障频率、啮合频率等)的“动态”显著指标,具有进一步深入研究的重要价值。因此对潮汐频率的提取放大还需要进一步的研究,使其更有效的应用于行星齿轮箱故障诊断。
对比图6(a)、图6(b)两图可以清楚地分析出图6(b)中太阳轮已经有了故障,特别需要指出的是在图6(a)中潮汐特征频率很不明显,难以分辨,而其它的特征频率均出现在无故障振动数据的包络谱中,如fC、fH。
图7为图6中0~60 Hz的频率成分放大图。为了清晰的说明各个频率成分,将各频率成分标号并分析列入表3。

图7 太阳断齿故障包络谱Fig.7 Envelope spectrum of the chipped sun gear

表3 断齿太阳轮包络谱中各频率成分
通过分析,表3中各个频率全部是由太阳轮故障频率、行星架旋转频率、潮汐频率和太阳轮旋转频率及其倍频组成,频率成分十分复杂,然而也说明行星齿轮箱中的调幅作用全部是由于太阳轮、行星架旋转、太阳轮故障以及潮汐现象引起的调制。图6和图7的分析表明,潮汐频率在实验信号中是确实存在的,并且潮汐特征频率是由于传递路径变化而产生的一种行星齿轮箱特有的故障特征频率。但是,从图6和图7也注意到,潮汐特征频率的幅值并不高,分析其原因主要是由于潮汐特征频率不是行星齿轮箱机械结构所确定的特征频率,而是一种由于行星轮系复合运动传递路径的远近变化而产生的一种振动信号调幅现象,这种振动调幅现象的振幅与传递路径的阻尼特性息息相关,而且会随着局部故障的产生而产生,是一种与故障同时发生和发展变化的故障特征频率。
对于早期故障,潮汐频率同样具有分辨能力。如图8所示,为行星齿轮箱太阳轮有齿根裂纹时的振动加速度信号的包络谱,该裂纹深度为1 mm。对比图8和图6(b)可以发现,在齿根裂纹下的故障特征频率fs处的幅值(0.002 072 m/s2)要远远小于断齿故障(0.007 367 m/s2),相对降低了71.13%,而潮汐频率ft在两种故障下的幅值(0.001 171 m/s2、0.002 127 m/s2)相差不大,相对降低了43.48%,说明潮汐频率在微弱故障的情况下同样具有很好的指示作用。但是,潮汐频率的幅值与其他成分相比相对较低,还需要进一步提取、放大、跟踪的深入研究,这也是针对潮汐频率研究的下一步工作,以便充分发挥潮汐频率在早期故障诊断中的作用。

图8 太阳轮齿根裂纹故障包络谱
在局部故障振动较小时(微弱故障),这种故障对振动调幅的影响也减弱,如图8所示。无故障实验太阳轮没有故障,但由于实验中的行星齿轮箱不是绝对完美的,并且齿轮的啮合振动信号随着振动传递路径的远近也具有时变特性,潮汐频率也存在,但是振幅很小,如图6(a)中的潮汐频率成分,几乎分辨不出来。当局部故障振动较明显时(断齿),潮汐特征频率出现在频谱里。因此,故障的特点也决定了潮汐频率的特点。通过上述的实验,可以看出潮汐特征频率作为行星齿轮系复合运动的产物可以用来对行星齿轮箱进行故障诊断,与故障的特点和故障的程度紧密相关,对深入认识行星齿轮箱故障的发生、发展过程可以提供重要的参考价值。
3 结 论
传统的行星齿轮箱故障诊断主要以其物理结构来确定故障诊断指标,如啮合频率、故障频率等特征频率。本文从行星齿轮箱运动特点出发,提出了一种潮汐频率诊断指标,从传统的物理结构特征指标提升到动态运动过程,对深入认识行星齿轮箱故障动态行为机理提供了理论基础。
同时,通过对行星齿轮箱太阳轮局部故障实验信号的分析,表明潮汐频率与行星齿轮箱太阳轮故障特征频率、行星架特征频率、太阳轮旋转频率等相互作用,出现比较复杂的调频现象,潮汐特征频率作为行星齿轮箱的一个特有的特征频率,可以用来对行星齿轮箱进行故障诊断。
此外,通过本文的工作,作者也发现潮汐特征频率是与故障本身的特性、行星轮的复合运动以及故障传递路径的物理特性紧密相关。在复合运动和传递路径的物理特性基本确定的情况下,可以通过潮汐频率成分的分析指示故障振动的特点,从而确定故障的形式和发展程度。作者也将进一步针对故障特点与潮汐频率成分的关联关系进行深入的研究,以期建立更为有效的、具有行星齿轮箱独特特点的故障诊断方法。
[ 1 ] LEI Y, LIN J, ZUO M J, et al. Condition monitoring and fault diagnosis of planetary gearboxes: A review[J]. Measurement,2014, 48: 292-305.
[ 2 ] YIP L. Analysis and modeling of planetary gearbox vibration data for early faultdetection[D]. University of Toronto, 2011.
[ 3 ] MARK W D, LEE H, PATRICK R, et al. A simple frequency-domain algorithm for early detection of damaged gearteeth[J]. Mechanical Systems and Signal Processing,2010, 24(8): 2807-2823.
[ 4 ] 雷亚国,孔德同,李乃鹏,等. 自适应总体平均经验模式分解及其在行星齿轮箱故障检测中的应用[J]. 机械工程学报,2014(3): 64-70. LEI Yaguo, KONG Detong, LI Naipeng, et al. Adaptive ensemble empirical mode decomposition and its application to fault detection of planetary gearboxes [J]. Chinese Journal of Mechanical Engineering, 2014(3):64-70.
[ 5 ] 冯志鹏,褚福磊. 行星齿轮箱齿轮分布式故障振动频谱特征[J]. 中国电机工程学报,2013,33(2): 118-125. FENG Zhipeng, CHU Fulei. Vibration spectral characteristics of distributed gear fault of planetary gearboxes [J]. Proceedings of the CSEE, 2013,33(2):118-125.
[ 6 ] FENG Zhipeng, ZUO M J. Vibration signal models for fault diagnosis of planetary gearboxes. [J] Journal of Sound and Vibration, 2012, 331:4919-4939.
[ 7 ] 冯志鹏,赵镭镭,褚福磊. 行星齿轮箱故障诊断的幅值解调分析方法[J]. 中国电机工程学报,2013,33(8): 107-111. FENG Zhipeng, ZHAO Leilei, CHU Fulei. Amplitude demodulation analysis for fault diagnosis of planetary gearboxes [J]. Proceedings of the CSEE, 2013,33(8):107-111.
[ 8 ] 冯志鹏,褚福磊. 行星齿轮箱故障诊断的扭转振动信号分析方法[J]. 中国电机工程学报,2013,33(14): 101-106. FENG Zhipeng, CHU Fulei. Torsional vibration signal analysis method for fault diagnosis of planetary gearboxes [J]. Proceedings of the CSEE,2013,33(14):101-106.
[ 9 ] 冯志鹏,褚福磊. 行星齿轮箱故障诊断的频率解调分析方法[J]. 中国电机工程学报,2013,33(11): 112-117. FENG Zhipeng, CHU Fulei. Frequency demodulation analysis method for fault diagnosis of planetary gearboxes [J]. Proceedings of the CSEE, 2013,33(11):112-117.
A fault diagnosis index based on complex movement of planetary gearbox
WANG Kuang1, WANG Kesheng1, ZUO Mingjian1,2
(1.Research Institute of Equipment Monitoring and Health Management, University of Electronic Science and Technology of China, Chengdu 611731, China;2. Department of Mechanical Engineering, University of Alberta, Edmonton, Canada)
Planetary gearboxes are widely used in wind turbine, aerospace, marine and other large engineering machines. Harsh operation conditions frequently cause faults, such as, pitting and fatigue crack to occur in planetary gearboxes. Most reported fault diagnosis methods deal with vibration signals in time domain or frequency domain. But the general signal processing methods are not effective for planetary gearboxes due to the complexity of vibration signals and combined motions of planetary gears. Based on the motion analysis of a sun gear and a planet gear and the time-varying fearures of fault vibration transmission paths, a new characteristic frequency named tidal frequency was proposed as a unique fault diagnosis index for planetary gear system’s fault diagnostics. Through test signal analysis of a planetary gearbox with a localized fault on its sun gear, it was shown that there exists the tide frequency and the proposed method is effective for planetary gearbox fault diagnosis.
planetary gear box; tide frequency; fault diagnosis
国家自然科学基金项目(51305067;51375078;SAST201311)
2015-08-03 修改稿收到日期:2015-10-22
王况 男,硕士,1990年生
王科盛 男,博士,副教授,1978年生
TH17
