“TIGER”号深水钻井船锚泊系统设计
2017-01-10程世明潘方豪殷俊俊
程世明 潘方豪 殷俊俊
(中国船舶及海洋工程设计研究院 上海200011)
“TIGER”号深水钻井船锚泊系统设计
程世明 潘方豪 殷俊俊
(中国船舶及海洋工程设计研究院 上海200011)
海洋深处是石油开发的宝藏,因此人们对深水钻井船的需求也日益增加。锚泊定位系统被许多钻井船所采用,是钻井船的重要组成部分。文章阐述“TIGER”号深水钻井船锚泊系统的设计过程,为同类型船锚泊系统的设计分析提供参考。
深水钻井船;锚泊定位系统
引 言
钻井船是具有传统船形的钻井装备,在船体舯部有月池开口用于钻井作业,具有可变载荷大和机动灵活的优点,广泛应用于深远海的油气勘探开发。钻井船在钻井作业时,需具备一定的定位能力,即在风、浪、流环境载荷的作用下保持一定范围内的水平位移,以免造成钻井隔水管的损坏。
目前,深水钻井船的定位方式包含锚泊定位和动力定位两种,其中动力定位的应用更为广泛。锚泊定位由于具备成本低廉且无环境污染的优势,从而得到较多应用。海洋钻井平台在发展过程中主要有传统的悬链线和张紧索系泊系统。“TIGER”号深水钻井船就采用悬链线锚泊定位方式。钻井船为船形装置,不同方向所受环境力差别很大,所以其布锚方式与平台装置不同,设计时应予以考虑。锚泊定位系统的确定主要取决于船型、环境条件(波高、周期、风速、流速、水深等)和作业要求,现介绍该船锚泊定位系统的设计。
1 锚泊系统设计
1.1 钻井船概况
“TIGER”号钻井船属紧凑型钻井船,采用前倾首柱、方尾和首楼型式,具备无限航区能力,采用柴电推进系统。该船在东南亚海域作业,设计作业水深914 m(3 000 ft),最大作业水深可扩展至1 524 m(5 000 ft)。“TIGER”号钻井船的主尺度如表1所示,总布置见图1。
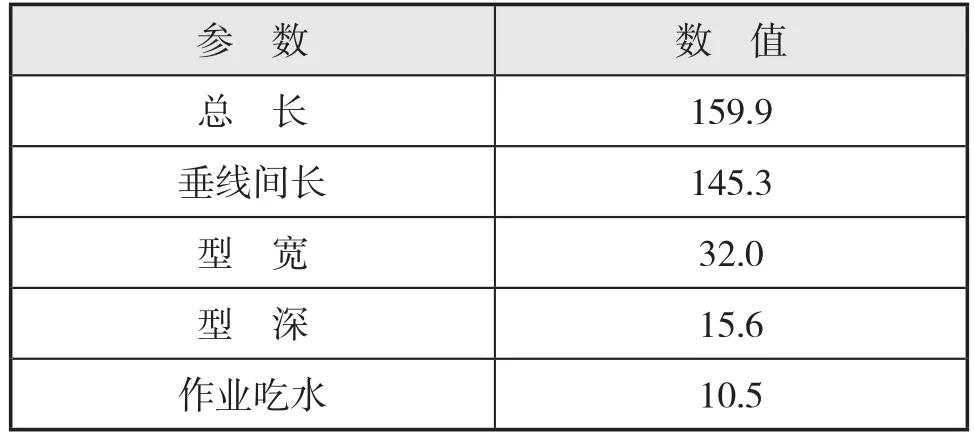
表1 “TIGER”号钻井船主尺度 m
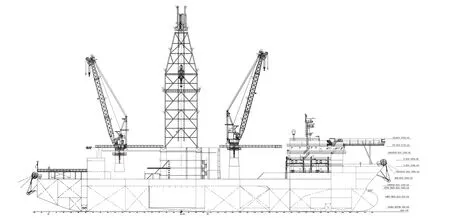
图1 “TIGER”号钻井船总布置概貌图
1.2 作业工况
在进行定位锚设计之前,必须确定钻井船的作业工况,此处作业工况即为钻井船作业时的环境条件。
“TIGER” 号钻井船作业于东南亚海域。东南亚海域的气候以季风为主,但是易出现台风。在每年11月到次年3月期间以东北方向季风为主,5月到10月以西南方向季风为主,且东北方向季风更为恶劣。因此在锚泊系统设计时,选取十年一遇的东北方向季风海况为作业工况。该船设计为出现台风时停止作业,所以仅选取一年一遇台风海况进行锚泊系统的校核,即为自存工况。作业工况和自存工况的风浪流条件见表2、表3。
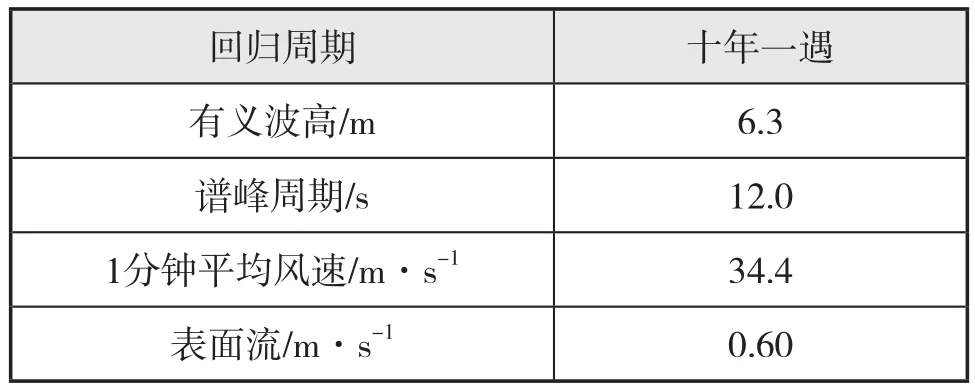
表2 东北方向季风海况(作业工况)
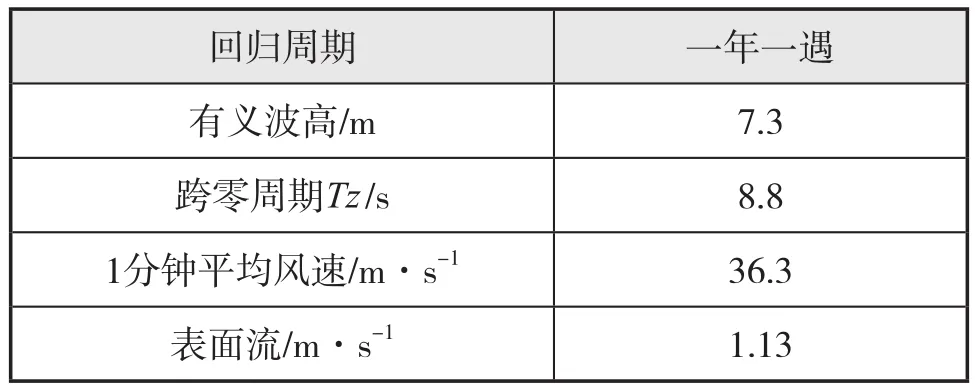
表3 一年一遇台风海况(自存工况)
1.3 锚泊形式
参考国外相似钻井船的锚泊系统以及相关工程经验,“TIGER” 号初步选用8点定位方式,如图2所示。锚索为钢丝绳+锚链组合系统,具体参数见表4。
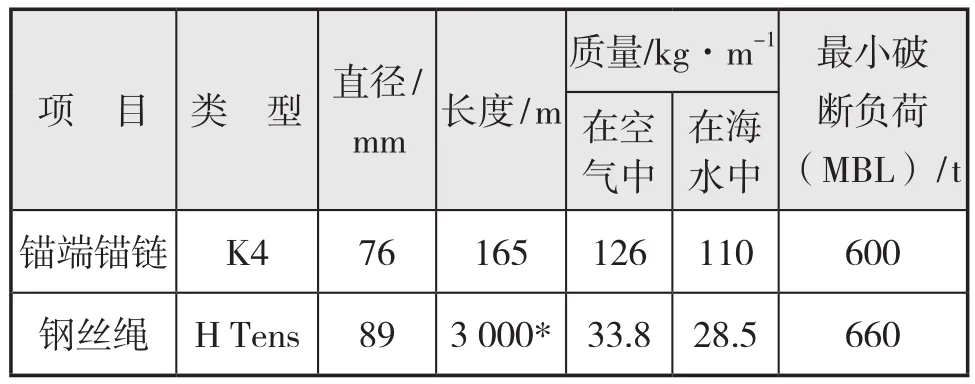
表4 缆-链锚索系统组成及参数
2 锚泊系统分析
本船锚泊系统根据ABS相关规范和美国石油学会API-RP-2SK进行设计。“TIGER”号在发生台风时撤离,该锚泊系统分别按照作业工况和自存工况进行分析,包含完整工况和单缆破断工况。
2.1 设计标准
装置偏移的限制要求是由立管等水下设备的限制条件确定的。极限张力以锚索最小破断强度(MBS)的百分率表示。ABS规范、API-RP-2SK用于不同工况、准静力分析方法的极限张力和等效安全系数以及拖曳埋置式锚的安全系数列于表5。
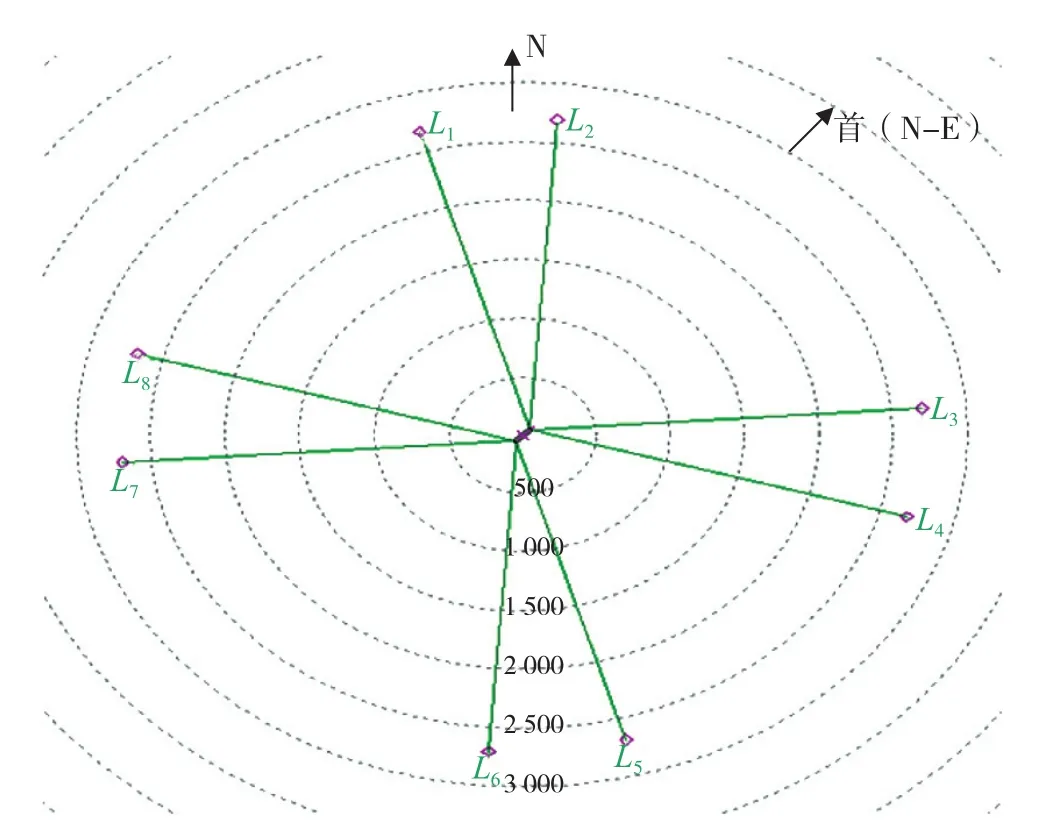
图2 “TIGER”号钻井船布锚示意图
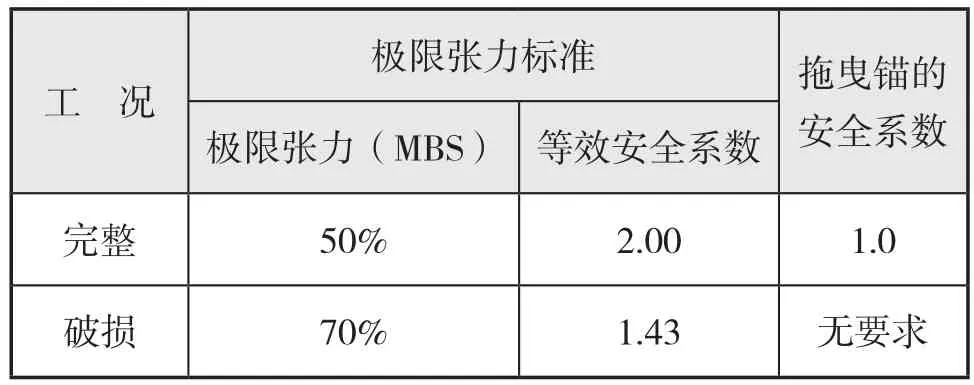
表5 极限张力和安全系数
2.2 锚泊系统分析结果
采用准静力分析法,经过分析软件计算,具体分析结果见表6以及下页表7。

表6 锚泊分析结果 —— 十年一遇季风条件(作业工况)

表7 锚泊分析结果 —— 一年一遇台风条件(自存工况)
表6、表7中的数据表明,作业工况和自存工况下环境载荷为NE、N-NE方向时锚索张力的安全系数及锚的载荷满足ABS/API-RP-2SK的要求。
3 锚泊系统配置和布置
根据定位分析确定“TIGER”号锚泊系统最终配置如下:
(1)锚:12 t Stevpris Mk6大抓力锚8只;
(3)锚绞车:双滚筒电动锚绞车4台;
除以上主要设备外,锚泊定位系统还包括立式绞盘、锚架、羊角滚轮导缆器和锚链管等辅件。
3.1 锚泊系统布置
“TIGER”号钻井船8点锚泊定位系统首尾各4点,首部与尾部布置类似,本文仅以尾部布置为主进行介绍。尾部锚泊设备布置于主甲板,4台导缆/链器依次排列于船尾,将锚索引向船外与锚连接。2台双滚筒电动锚绞车布置于尾部绞车舱。尾部锚泊系统具体布置见下页图3。
3.2 锚绞车
本船配备4台双滚筒电动锚绞车。该锚绞车容绳量为3 000 m(15层),支持负载为660 t。低速状态下,中间层(第8层)的拉力为180 t,只能收存钢丝绳,可在机旁操作或驾驶室控制,附属设施有锚索张力测量及指示仪、锚索抛出长度指示仪、锚索抛出速度指示仪等。该锚绞车的外形及各主要部件见下页图4。
3.3 导缆/链器
导缆/链器是将锚索从船内引出船外的导向装置。本船配置的导缆/链器允许89 mm钢丝绳和76 mm锚链通过,水平安装于甲板边缘。该导缆/链器的外形如图5所示。

图3 “TIGER”号钻井船尾部锚泊布置

图4 “TIGER”号钻井船双滚筒电动锚绞车

图5 “TIGER”号钻井船水平导缆/链器
4 结 论
深水钻井船采用锚泊定位方式有利有弊,但锚泊定位方式具有成本低廉、节能环保的优点,故在许多深水钻井船上仍然得到应用。本文以“TIGER”号钻井船为工程对象,阐述了锚泊定位系统设计分析过程,并给出锚泊系统在船上的具体布置。本文的研究结果可为相似深水钻井船或工程船的锚泊定位系统设计提供参考。
[1]ABS.Rules for Building and Classing Mobile Offshore Drilling Units [S].2012: 160-163.
[2]American Petroleum Institute.API RP 2SK[S].2005.
[3]严传续,钱宏,项军毅,等.铺管船锚泊定位系统优化设计研究[J].中国造船,2010(1):84-93.
[4]潘方豪.“LUCKY ANGEL”半潜驳的锚泊设计[J].船舶,2006(1):54-56.
[5]邱崚,唐军.300 000 DWT浮船坞的锚泊系统设计[J].船舶设计通讯,2010(增刊):75-90.
Design of anchor mooring system for deep-water drilling ship “TIGER”
CHENG Shi-ming PAN Fang-hao YIN Jun-jun
(Marine Design & Research Institute of China, Shanghai 200011, China)
The deep-water drilling ships become increasingly demanded because there is treasure of oil development in deep ocean.Anchor mooring positioning system has been used by many drilling ships as important components.This paper elaborates the design procedure of the anchor mooring positioning system for deep-water drilling ship “TIGER”, which can provide references for the design and analysis of the anchor mooring positioning system on the similar deep-water drilling ships.
deep-water drilling ship; anchor mooring positioning system
U664.4
A
1001-9855(2016)06-0081-06
2016-06-15;
2016-07-19
程世明(1989-),男,助理工程师,研究方向:船舶与海洋工程舾装设计与研究。潘方豪(1978-),男,研究员,研究方向:船舶与海洋工程舾装设计与研究。殷俊俊(1982-),男,工程师,研究方向:船舶与海洋工程舾装设计与研究。
10.19423/j.cnki.31-1561/u.2016.06.081