考虑粘性的三体船非线性横摇预报研究
2017-01-10张艺瀚蔡新功
张艺瀚 王 平 蔡新功
(中国船舶及海洋工程设计研究院 上海200011)
考虑粘性的三体船非线性横摇预报研究
张艺瀚 王 平 蔡新功
(中国船舶及海洋工程设计研究院 上海200011)
三体船主体与侧体之间的流动干扰以及舭龙骨等附体造成的漩涡分离,使其在波浪中运动时的横摇非线性效应更加强烈而复杂。应用CFD方法模拟某典型三体船在静水中的衰减和强迫横摇运动,得到非线性横摇阻尼并分析其变化规律。应用等效线性化原理修正并求解基于三维线性势流理论建立的横摇运动方程。研究结果与模型试验比较后得出,采用粘性流CFD方法并结合三维势流理论可较准确地预报三体船的非线性横摇阻尼和波浪中的横摇运动。
三体船;非线性横摇;三维势流理论;粘流理论;计算流体动力学
引 言
三体船是一种新型的水面平台,水下部分由主体和两个侧体共三个细长船体组成,两个侧体通过连接桥与中体连接成一体。三体船的船型特点使其具有良好的稳性、阻力和耐波性等性能。横摇运动性能是耐波性研究中的重点,对船舶的适居性、使用性、安全性等都有重要的影响。目前,国内外单体船的横摇运动预报主要包括二维切片法、三维频域法、三维时域法等,其中对于非线性横摇一直是难以完善的问题[1]。
目前,三体船的横摇运动主要依靠船模试验,国内外针对三体船的横摇运动的理论预报研究较少。Zhang J W研究了三体船非线性横摇阻尼的处理方法,通过试验和经验公式两种方法计算非线性横摇阻尼[2],并对横摇阻尼的非线性成分进行了系统分析[3]。李培勇等通过三体船模型的静水横摇试验和规则波中的横摇运动试验,得到侧体横向位置以及舭龙骨的存在对三体船横摇运动的影响[4-5]。对于横摇运动的非线性计算方法,基于段文洋(Duan Wenyang)在二维半理论时域格林函数上的研究[6],项久洋[7]运用三维时域Rankine源方法研究船型要素对三体船耐波性的影响,李辉等[8]研究基于等效线性原理的横摇阻尼势流计算法,针对不同船型指出非线性横摇阻尼经验公式的适用性。
然而,这些理论预报结果无法准确考虑三体船非线性效应及流体粘性影响,与试验值存在一定差距。
CFD方法可以在横摇阻尼中有效考虑流体粘性的影响,Yu Yi Hsiang等[9]对四个不同的船体剖面进行自由横摇衰减和强迫横摇运动模拟,给出不同剖面不同横摇幅值下的横摇力矩时历和横摇阻尼系数,黄昊等[10]对系列60船型进行强迫横摇数值模拟,提出通过强迫横摇得到横摇阻尼系数的方法,朱仁传等[11-12]也应用CFD方法进行单体船的横摇运动数值计算,但针对三体船的三维CFD横摇数值计算,目前仍没有深入研究。
本文提出势流理论结合粘性修正的方法,应用CFD方法计算三体船的非线性横摇阻尼,修正三维势流理论建立的横摇运动方程中,试图求解三体船在波浪中的横摇运动响应。
1 CFD法求解静水非线性横摇阻尼
1.1 计算模型建立
应用GAMBIT前处理工具建立三体船三维非结构网格模型,在FLUENT平台应用UDF编程的动网格技术和滑移网格技术模拟静水横摇衰减运动和固定频率下强迫横摇运动,计算采用有限体积法建立离散控制方程,应用VOF多相流模型,湍流模式采用标准k-ω模式。计算模型和计算域网格见图1和图2。

图1 三体船计算模型

图2 三体船计算网格
1.2 强迫横摇运动模拟
横摇强迫运动指强迫计算模型以一定的频率和幅值进行横摇运动,分析横摇阻尼系数和频率以及它们与幅值之间的关系。目前国内外对于三体船型的二维剖面强迫横摇运动研究较多,本文采用三维计算模型可以真实反映三体船横摇阻尼中侧体与主体干扰以及舭龙骨等附体产生的非线性部分。
采用滑移网格的方法,在模拟过程中不仅不需要进行网格重画,而且可以有较大的时间步长,大大提高计算精度和效率。横摇强迫运动采用UDF工具进行编程,使用FLUENT自带的DEFINE_CG_ MOTION宏进行定义,模拟横摇运动见式(1):


图3 强迫横摇运动动画捕捉
其中1.57 rad/s频率下得到的横摇力矩曲线如图4所示。可见,随着摇幅和频率的增加,横摇阻尼力矩逐渐增加,与文献中的单体船具有相似规律。

图4w=1.57 rad/s频率下的横摇力矩时历曲线
根据上述横摇力矩曲线可得到线性化横摇阻尼系数:

当横摇角度为0°,将横摇角速度最大时的瞬时横摇力矩代入式(2)便可求出线性阻尼力矩,无因次化后得到:

此线性阻尼系数可视为已考虑了漩涡阻尼、流体粘性等非线性因素的等效线性化阻尼。计算模型的无因次阻尼系数见表1。可见,横摇阻尼系数随着波幅和频率的增加而增大。
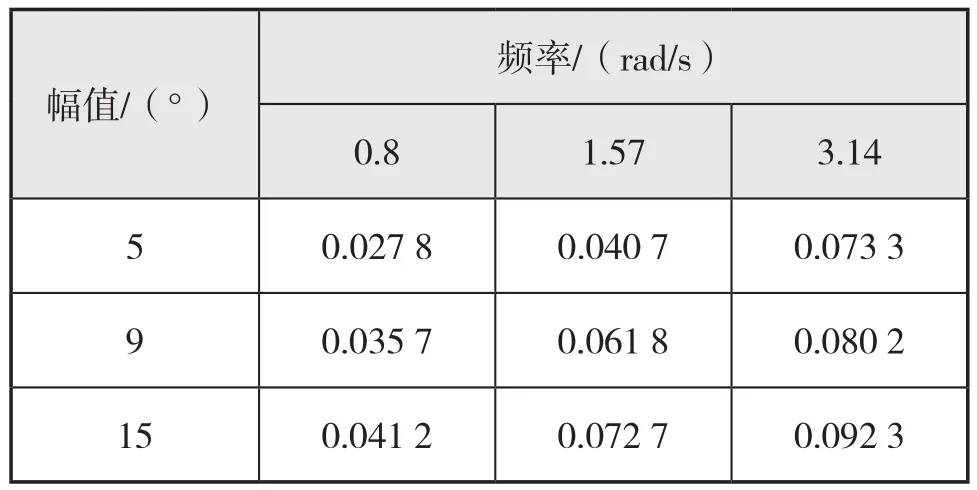
表1 三体船三维模型无因次横摇阻尼系数
1.3 横摇衰减运动模拟
船舶的静水横摇衰减试验通常用于测定线性和平方横摇阻尼系数,CFD方法可有效模拟三体船的静水横摇试验,得到衰减曲线。
以上述计算模型为例,计算零航速下初始横摇角为5°、9°和15°时的横摇衰减运动,结果如图5所示。

图5 不同初始角下的横摇衰减曲线
可见,不同初始角下的横摇固有周期略有差距,初始角越大、衰减幅度越大,体现了大幅横摇下的横摇的非线性效应。
基于Fround[13]及Haddara[14]等人的研究和目前普遍采用的形式,本文对阻尼力矩采用的是线性项加平方项的关系,因此其对应关系如下:

式中:a、b为衰减系数;A、B为阻尼力矩系数;分别为横摇角速度、衰减曲线相邻两振幅平均值、衰减曲线相邻两振幅之差。
根据衰减曲线得到横摇角的消灭曲线并通过最小二乘法拟合得到衰减系数,由式(5)得到横摇阻尼力矩系数(见表2)。
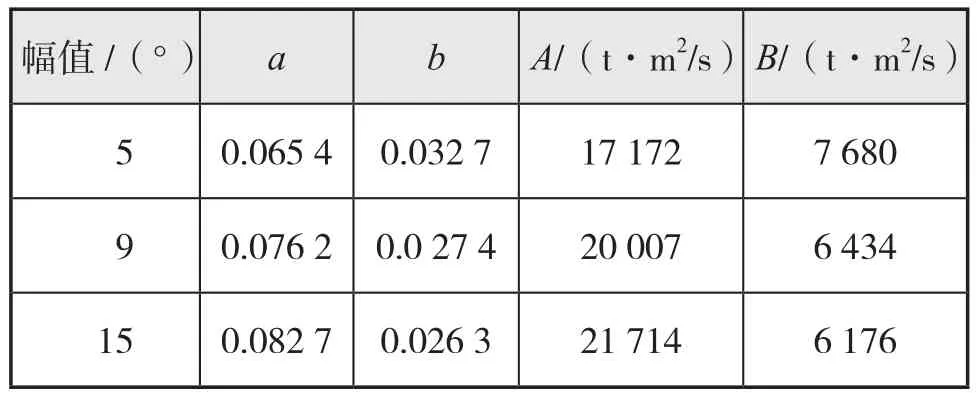
表2 横摇阻尼
可见,随着初始角度的增加,消灭系数a逐渐增加,而系数b呈减少的趋势,符合理论计算规律[15]。

式中:D为船的质量;h为船的横稳心高;为船自由横摇的近似固有圆频率。
1.4 横摇阻尼比较分析
通过强迫横摇运动结果可直接计算三体船在特定频率和特定摇幅下的线性化横摇阻尼,近似船舶在规则波中横摇时的非线性横摇阻尼。表3、表4为CFD计算值与试验值的比较,其中试验值采用衰减试验得到的线性和平方阻尼,利用等效线性化方法[15]得到横摇阻尼。可见,CFD方法与试验值较为接近,误差在5%以内。

表3 零航速下强迫运动9°横摇阻尼系数比较

表4 10 kn航速下强迫运动9°横摇阻尼系数比较
CFD横摇衰减运动模拟了船模水池静水横摇试验,可实现横摇线性阻尼和平方阻尼的求解,表5—表7为CFD计算值与船模静水横摇衰减试验结果的比较。可见,随着航速的增加,横摇阻尼系数增加,且非线性横摇阻尼的比例减少,数值计算结果与试验值较为接近,误差在5%以内。CFD方法可以在没有条件进行水池船模试验时,在一定工程误差范围内预报三体船的横摇阻尼。

表5 零航速衰减运动横摇阻尼系数比较

表6 10 kn航速衰减运动横摇阻尼系数比较

表7 18 kn航速衰减运动横摇阻尼系数比较
2 波浪中横摇运动预报
三维线性势流理论是预报船舶在波浪中运动的重要方法。针对三体船型,势流理论建立的横摇运动方程无法准确考虑片体主体流动干扰、附体漩涡分离等横摇非线性因素,而直接求解非线性横摇运动方程在数学上较为困难。本文在三体船的非线性横摇阻尼求解的基础上,提出采用势流理论结合CFD粘性修正的方法近似求解非线性横摇运动方程,获得不同航速规则波中的横摇运动响应。
2.1 线性运动方程
根据三维势流理论,船舶在波浪中的运动总方程为:


水动力系数由式(8)求解:

2.2 非线性横摇修正
式(6)中,横摇线性阻尼系数为B44,其可通过式(8)求得。考虑非线性横摇阻尼后,采用线性加平方阻尼力矩形式:

将上式直接代入运动方程后的非线性微分方程求解困难,本文采用等效线性化原理得到线性化横摇阻尼力矩。

计算关键在于线性阻尼系数A和平方阻尼系数B。本文提出粘流结合势流的方法,即采用CFD数值模拟得到线性和平方阻尼系数,等价线性化后计入横摇运动方程中,取代原来的线性横摇阻尼系数B44,这样既包含兴波阻尼,又包含摩擦阻尼、漩涡阻尼及流体干扰等非线性因素,在线性横摇运动方程中体现非线性横摇阻尼力矩的影响。另外,本文在横摇方程求解时同时考虑恢复力矩的非线性,将非线性项展开,略去高阶项得到线性化的恢复力矩系数。
2.3 实例计算与分析
根据上述势流和粘流相结合的方法,针对上述三体实船计算其在规则波中的横摇运动响应。应用三次样条曲线建立三维面元水动力计算模型,如图6所示。

图6 目标三体船水动力计算模型
CFD计算结果与试验值、线性势流理论值及船模衰减试验修正值进行比较,其中船模衰减试验修正值是指采用船模衰减试验得到的横摇阻尼系数代替数值计算结果进行横摇运动方程的非线性修正。
在横浪90°和斜浪下,计算三体船在0 kn、10 kn、18 kn下的横摇运动频响函数见图7。其中规则波参数为:单位波幅、浪向角90°、斜浪45°、波浪圆频率0.1~2.0 rad/s。

图7 横摇频域响应
从横浪和斜浪规则波横摇运动的预报情况来看,横摇阻尼系数对响应幅值影响较大。采用本文势流粘流组合方法得到的非线性横摇阻尼修正势流理论横摇方程的方法得到的结果与试验值符合较好,并与通过船模试验获得阻尼系数修正方法结果较为接近。另外,如果不对线性横摇阻尼进行非线性修正,则得到的响应幅值普遍高于试验值。
横摇幅值在波浪周期接近船舶横摇固有周期时达到峰值,符合理论规律。横浪中的预报值高于斜浪中预报值,且随着航速增加,横摇阻尼增大,横摇峰值逐渐减少,线性结果与非线性修正后结果之间的差距也在减少。这说明零速横摇时非线性因素成分较大,随着航速增加,线性阻尼占主导因素。
3 结 论
(1)三体船型较为特殊,横摇阻尼的求解必须综合考虑主体与侧体的流体干扰、漩涡产生和分离以及附体阻尼等现象引起的粘流非线性效应,而CFD数值模拟方法可较准确求解三体船的横摇运动,并考虑上述非线性。其中,强迫运动可以模拟三体船在固定频率和摇幅下的横摇运动,三维衰减运动可以模拟静水横摇运动,从而得到非线性横摇阻尼系数。
(2)本文提出的势流粘流组合方法可以较准确地预报三体船在规则波中横摇运动,既体现了势流理论在求解方程的优势,又能考虑非线性效应,比单纯的三维势流理论和切片理论更加精确,因此可作为三体船在波浪中横摇运动预报方法在工程中广泛应用。另外,横摇阻尼的非线性修正对纵摇、垂荡等预报不会产生影响,也适合基于势流理论的六自由度运动预报。
[ 1 ]刘宇辰,任毅,蔡新功,等.三体船横摇运动试验研究[J].船舶,2011(2):20-23.
[ 2 ]Zhang J W.Roll damping characteristics of a trimaran displacement ship[J].International Shipbuilding Progress.1999,448:445-472.
[ 3 ]Zhang J W.Investigation into roll damping of trimaran ships[J].NARG Report, 1996,1026: 225-276.
[ 4 ]李培勇,裘泳铭,顾敏童,等.超细长三体船耐波性试验研究[J].海洋工程,2002(4):1-10.
[ 5 ]李培勇,冯铁城,裘泳铭.三体船横摇运动[J].中国造船,2003(1): 24-30.
[ 6 ]Duan Wenyang, Hudson D A, Price W G.Theoretical prediction of the motions of fast displacement vessels in long-crested head seas[C]//The 3rd International Conference for High Performance Marine Vehicles,Shanghai, China, 2000: 116-122.
[ 7 ]项久洋.船型要素对三体船耐波性和波浪载荷影响的数值计算[D].武汉:武汉理工大学,2008:25-45.
[ 8 ]李辉,张艺瀚,任慧龙.非线性横摇阻尼对波浪扭矩和运动的统一修正[J].哈尔滨工程大学学报,2013(7):1-6.
[ 9 ]Yu Yi Hsiang, Spyros A Kinnas.Prediction of hydrodynamic performance for various ship-shaped hulls under excessive roll motions using an unsteady Navier-Stokes solver[C]//Proceedings of the 18th IOPEC, Vancouver BC,Canada, 2008: 265-286.
[10]黄昊,郭海强,朱仁传,等.粘流中船舶横摇阻尼计算[J].船舶力学,2008(4):568-573.
[11]朱仁传,杨春蕾,缪国平,等.粘性流中三维船体横摇运动数值模拟及阻尼计算[C]//第十一界全国水动力学学术会议暨第二十四届全国水动力学研讨会周培源诞辰110周年纪念大会文集(下册).中国,2012:903-912.
[12]朱仁传,郭海强,缪国平,等.一种基于CFD理论船舶附加质量与阻尼的计算方法[J].上海交通大学学报,2009(2):198-203.
[13]Froude J E.Remarks on Mr Scott-Russell's paper on rollin[M].The Papers of William Froude.1955: 112-118.
[14]Haddara M R, Bennett P A.A Study of the angle dependence of roll damping moment[J].Ocean Engineering,1989(4):26-32.
[15]李积德.船舶耐波性[M].第2版.哈尔滨:哈尔滨工程大学出版社,1991:1-3.
[16]戴仰山,沈进威,宋竞正.船舶波浪载荷[M].第1版.北京:国防工业出版社,2007:1-4.
Nonlinear rolling prediction for trimaran ships considering viscous effect
ZHANG Yi-han WANG Ping CAI Xin-gong
(Marine Design & Research Institute of China, Shanghai 200011, China)
The nonlinear effect is more intense and complex for the trimaran rolling in waves due to the disturbance between the main hull and side hulls, and the vortex shedding that is caused by the appendages as bilge keels.The roll decay and forced rolling in the calm water for a typical trimaran are simulated by CFD methods.The nonlinear roll damping is then obtained for the analysis of the roll damping rule.The trimaran rolling equation which is constructed by the three-dimensional (3D) potential flow theory is modified and solved by applying the equalization linearised theory.By comparison with the model test, the results show that the nonlinear roll damping and rolling in waves can be accurately predicted through the viscous flow CFD method combined with 3D potential flow theory by comparison with the model test results.
trimaran; nonlinear rolling; 3D potential flow theory; viscous flow theory; CFD(computation fluid dynamics)
U661.32
A
1001-9855(2016)06-0012-07
2015-09-09;
2016-07-27
张艺瀚(1987-),男,工程师,研究方向:舰船总体设计。王 平(1965-),男,研究员,研究方向:舰船总体设计。蔡新功(1974-),男,研究员,研究方向:舰船总体设计。
10.19423/j.cnki.31-1561/u.2016.06.012