海洋工程船U型减摇水舱设计
2017-01-10尉志源仲伟东
尉志源 仲伟东
(中国船舶及海洋工程设计研究院 上海200011)
海洋工程船U型减摇水舱设计
尉志源 仲伟东
(中国船舶及海洋工程设计研究院 上海200011)
采用经验公式及设计经验相结合的方式研究U型减摇水舱在初期阶段设计的过程。首先对U型减摇水舱的工作机理、减摇水舱参数、固有周期进行分析,研究U型被动可控式减摇水舱的特点,然后对其适用船型、布置位置、设计约束条件、效果评价等方面进行研究,提出一种对被动可控式减摇水舱的设计流程,最后举例设计并验证目标船舶的减摇水舱设计。
海洋工程船;U型减摇舱;被动可控式;横摇固有周期;设计流程
引 言
海洋工程船在动力定位、系泊状态下作业时需要良好的耐波性,主要设计指标是将横摇角降至合理的范围。船舶由于自身的横摇阻尼较小,往往导致横摇较大,因此,设计专门的减摇装置是改善横摇性能的重要方法。
减摇装置可分为主动式和被动式两类。主动式减摇装置依靠本身的动力和控制系统使船舶产生稳定力矩以减少横摇;被动式减摇装置本身不具有动力,仅根据使船舶横摇的风浪扰动力矩的大小而起作用。
舭龙骨、减摇鳍、减摇水舱等装置是常见的船舶减摇装置。舭龙骨因结构简单、价格便宜以及良好的减摇效果(减摇20%~30%)等优势几乎为海工船必备。减摇鳍作为目前效果最好的减摇装置(减摇85%~90%),常用于航速较高的军船。
常规减摇鳍在船舶零航速下几乎没有效果,因此一般不用于海工船舶;非常规减摇鳍因造价过高,也不具有工程普遍适用性。减摇水舱由于其适用于系泊和定位零航速状态,并且价格适中、减摇效果良好(减摇30%~70%),因此普遍用于对船舶横摇有较高需求的海洋工程船[1]。
减摇水舱根据控制型式不同,主要分为以下三类:
(1)主动式减摇水舱。该型式借助水泵或压缩空气,根据横摇情况,将舱内水从一舷打到另外一舷。然而,该型式需要较大动力,才能在短时间内实现左右调拨舱内水,故目前工程很少采用。不过,笔者大胆预测,未来船舶动力充沛,对船舶横摇角要求极高,主动式水舱或将成为稳定船舶横摇的主要设施。
(2)被动式减摇水舱。该型式本身没有动力和控制系统,主要包括U形减摇水舱和自由液面减摇水舱两种。
(3)被动可控式减摇水舱。该型式通常在U型被动式减摇水舱的基础上,在两边舱顶部或是空气通道上安装气阀,利用控制气阀的开关来实现水舱内液体流动的控制,使水舱中的液体始终保持在船舶向上运动的一侧水舱内。[2]
在概念或方案设计时,通常需要总体专业确定减摇水舱的基本尺寸。本文研究的重点是如何能在缺少试验数据且计算软件不成熟的情况下,快速有效地确定设计方案。
1 U型减摇水舱工作机理
1.1 U型被动式减摇水舱工作机理
被动式减摇水舱是根据“双共振”的原理进行设计,即减摇水舱水流振荡的周期与船舶横摇运动的周期相等。在船舶谐摇时,波浪与船舶横摇之间以及船舶横摇和水舱内水流振荡之间发生双重共振现象,使水舱内水流振荡对船体产生的力矩与波浪对船体产生扰动力矩的相位相反,从而达到被动式减摇水舱的减摇效果。即:

式中:TB为波浪周期,s;Tθ为船舶横摇固有周期,s;Tw为减摇水舱内水的振荡周期,s。
图1为U型被动式减摇水舱的工作机理图。

图1 U型被动式减摇水舱原理及相位图
图1表明,被动式减摇水舱是利用滞后船舶横摇相位90°来达到减摇效果。该方法优点是不需要船舶内部动力,完全利用波浪能量,因此费用低且操作简单;缺点是不能针对各装载状态及时进行调节水舱水量,也不能应对不同海况条件下不断变化的船舶运动状态。因此当船舶自身横摇周期发生变化时,将导致被动式减摇水舱的横摇频率与船舶横摇的频率相差较大,减摇效果明显降低,甚至会使横摇加剧。
1.2 U型被动可控式减摇水舱工作机理
被动可控式减摇水舱仍然根据共振的原理进行设计,但通过增加气阀的设置,使减摇水舱一侧的水量始终保持较高水平。这样不仅能够应对经常变化的外部波浪条件,而且能够防止横摇加剧,提高可靠性。同时,气阀可以有效调节阻尼,使减摇水舱流速得到一定的控制。图2为U型被动可控式减摇水舱的工作机理图。
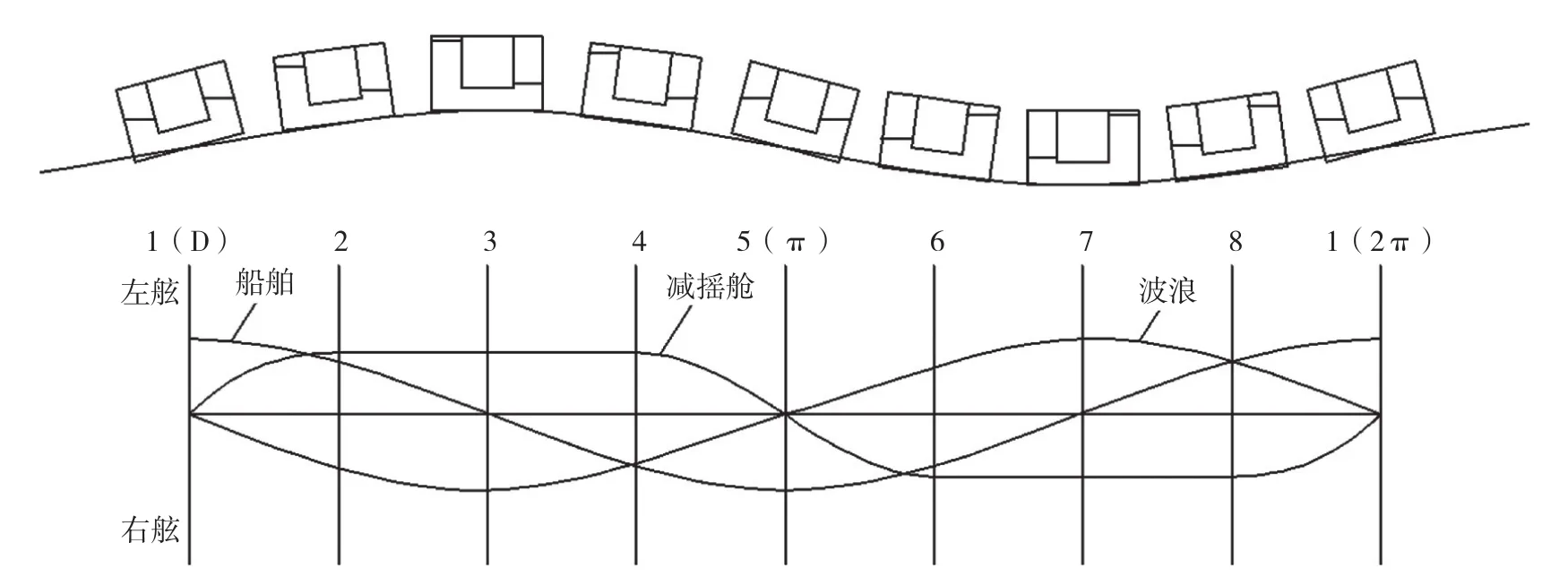
图2 U型被动可控式减摇水舱原理及相位图
图2表明:在相位2至相位4以及相位6至相位8时,减摇气阀处于关闭状态;在相位4至相位6时,减摇气阀处于打开状态。相位2至相位4段以及相位6至相位8段表明被动可控式减摇水舱内水的振荡波形被改变,延长了峰值覆盖范围,因此适用于更大范围的船舶横摇周期。
2 U型被动可控式减摇水舱设计
U型被动可控式减摇水舱设计主要遵循两个原则:一是U型减摇水舱的自摇周期与船舶横摇周期匹配;二是U型被动可控式减摇水舱内部的阻尼能保证减摇水舱在合适时间内左右流动,即在相位4至相位6段能够快速流动。阻尼太小,会使减摇舱内水流速度太快,并引发撞击顶部及晃荡所造成的结构风险;阻尼太大,会使减摇舱内水流速度过慢,从而不能最大程度体现减摇效果。U型减摇水舱阻尼大小主要受U型舱内通道尺寸与内部结构形式的影响,这往往需要反复试验才能获得准确数据。U型被动可控式减摇水舱更受限于气阀调节的能力,而该控制方法涉及控制系统设计,故在此不作深入论述。本文注重分析周期匹配性,研究如何在总体设计初期确定U型被动可控式减摇水舱的尺度。
2.1 横摇固有周期
被动式减摇水舱采用双共振的原理进行设计,选取水舱的固有周期与船舶横摇固有周期相等。U型被动可控式减摇水舱由于气阀的控制作用,其固有周期往往小于船舶。因此在设计U型减摇水舱的固有周期时,不能按照船舶固有横摇周期来设计,一般应选取接近船舶可以安全作业的海况进行设计,即服务处所海浪的平均周期。图3为 U型减摇水舱的典型横剖面图。

图3 U型减摇水舱典型横剖面图
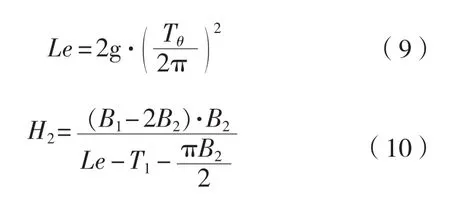
其固有周期可以用式(2)表示:

Le为水舱的特征长度,经验公式分为以下几种:
常用公式[3]:

罗布公式:

渡边公式:

交大经验公式[4]:

以上三种经验公式均表明U型减摇水舱的固有周期主要受到B2和H2的影响。三种经验公式计算结果相差不大,根据工程经验,本文取交大经验公式作为计算值。
2.2 设计原则
2.2.1 适用船型
U型减摇水舱适用于船宽较大、稳性有一定余量的工程船舶,一般对于为0.03~0.18的船舶较为适用,而对方形系数较小、线型为“V形”的船舶则不宜使用。[1]
2.2.2 水舱位置
U型减摇水舱在设计阶段时,首先需要确定减摇水舱在船舶的布置位置。横向位置上为得到最大的倾斜力矩,减摇水舱的总宽度一般与船宽相等,减摇水舱的边舱宽度一般与船舶舷侧的压载舱等宽。纵向位置上既要考虑平衡船舶的纵向浮态,又要避免产生过大的首摇,所以一般布置于船舯1/3舱段内较为适宜。在垂向位置上,随着垂直位置不断增加,由于舱内压载水的惯性作用,水舱的减摇效果不断提高,但考虑到对船舶重心的影响及布置受限,一般将水舱布置在船舶重心高度附近。本文考虑减摇水舱布置在船舶重心附近的计算案例。
2.2.3 约束条件
U型减摇水舱的水量一般不超过船舶4%排水量,在工程船上一般不超过5%。
为保证U型水舱的水不冲击舱顶部且不产生严重噪声,液位高度T1一般低于60%边舱高度H3,本文设计中取50%。
由于U型减摇水舱的自由液面影响,稳性高应该满足船舶规范的要求。
2.2.4 评价指标
U型减摇水舱的效果一般用特征数和减摇效果表示。
特征数[4]:

式中:φs为船舶在静水中U型减摇水舱从一舷移至另外一舷时的船舶静横倾角;φd为U型减摇水舱内水的惯性作用或其他影响(气阀控制)对船舶横倾角的影响,一般为φs的20%~30%,方向与φs相反。本文考虑被动可控式减摇水舱的气阀控制影响,该高度位置位于船舶重心以下,φd取20%φs,即:

φs的设计目标一般为3°~ 4°,φCH的设计目标一般为2°~ 3°,根据每条船的不同设计要求而取不同值。
减摇效果:工程上,减摇效果通常以船舶横摇角度幅值的相对减小值来表示,即:。其中φB为不计减摇效果的船舶横摇角(注意与供应商所采用的减摇效率进行区别)。本文以作为减摇效果的评估值。
2.3 设计过程
2.3.1 输入条件
设计U型减摇水舱时,目标船舶的基本参数往往已经初步确定。以假定某目标船为例,表1为该船参数输入。
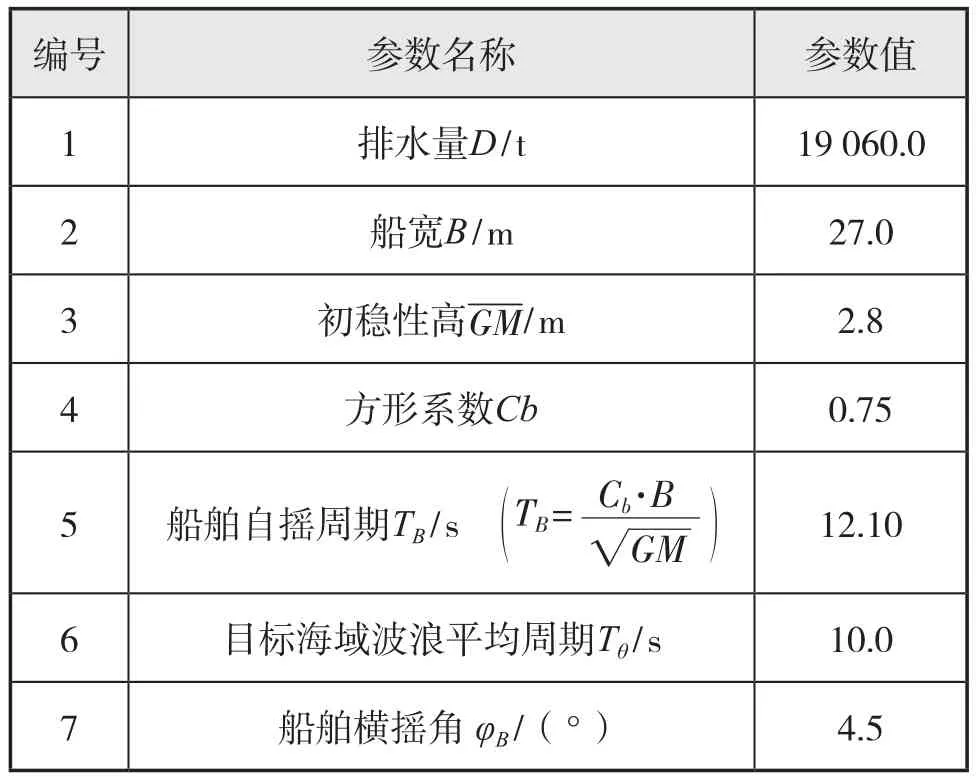
表1 船舶参数输入
根据本文2.2.2节的分析,一般U型减摇水舱的宽度B1与船宽B相等,U型减摇水舱的总高度H1和U型舱边舱宽度B2在设计初期基本确定。因此,U型舱总宽度B1、U型舱总高度H1、U型舱边舱宽度B2可作为输入条件,如表2所示。
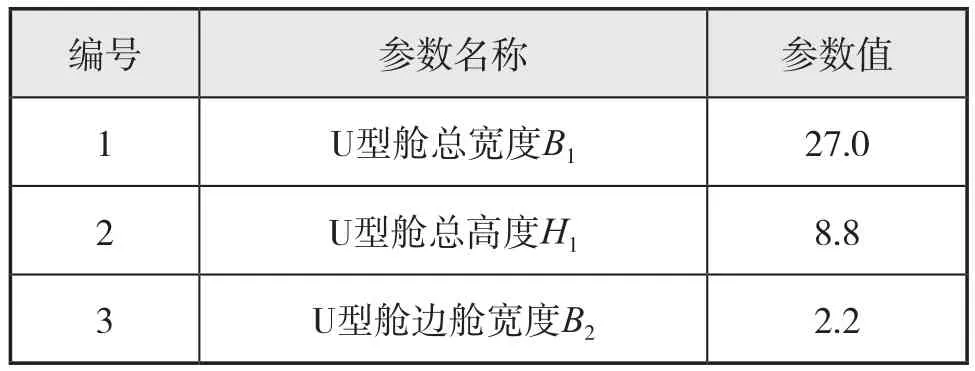
表2 U型被动可控式减摇水舱参数输入m
2.3.2 设计流程
第一步:
根据U型舱总高度H1,确定U型舱边舱液位高T1,本文取T1=H1×0.4。
第二步:
根据U型舱边舱宽度B2,目标海域波浪平均周期Tθ,确定U型舱底部通道高度H2。
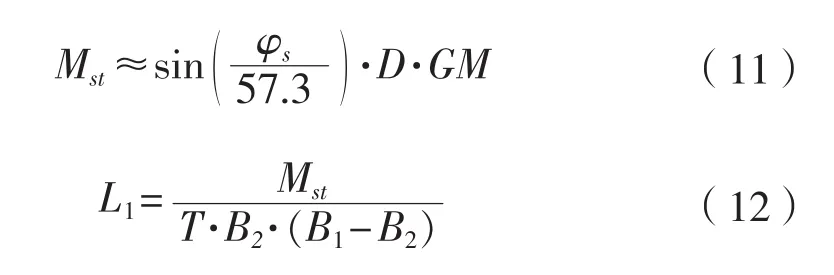
第三步:
根据目标最大静横倾角φs得到最大静横倾力矩Mst,确定U型舱总长度L1。本文取φB为2.5°、3°、3.5°和4°共四个值来进行分析判断。[3]
2.3.3 结果分析
根据表3分析结果,考虑U型底部通道受到纵向结构件的影响,约损失0.15 m,U型舱底部通道高度H2取整为1.4 m;再考虑减摇水舱内总装水量不宜过大,并按照肋位整数档及布置限制条件,故U型舱总长度L1取13.2 m。

表3 计算结果
2.4 设计验证
根据表4验证结果可知,该U型减摇水舱特征数为2.29°,减摇效果可达50.9%。U型被动可控式减摇水舱的固有周期与目标海域波浪平均周期较为接近,稳性高且满足设计要求。
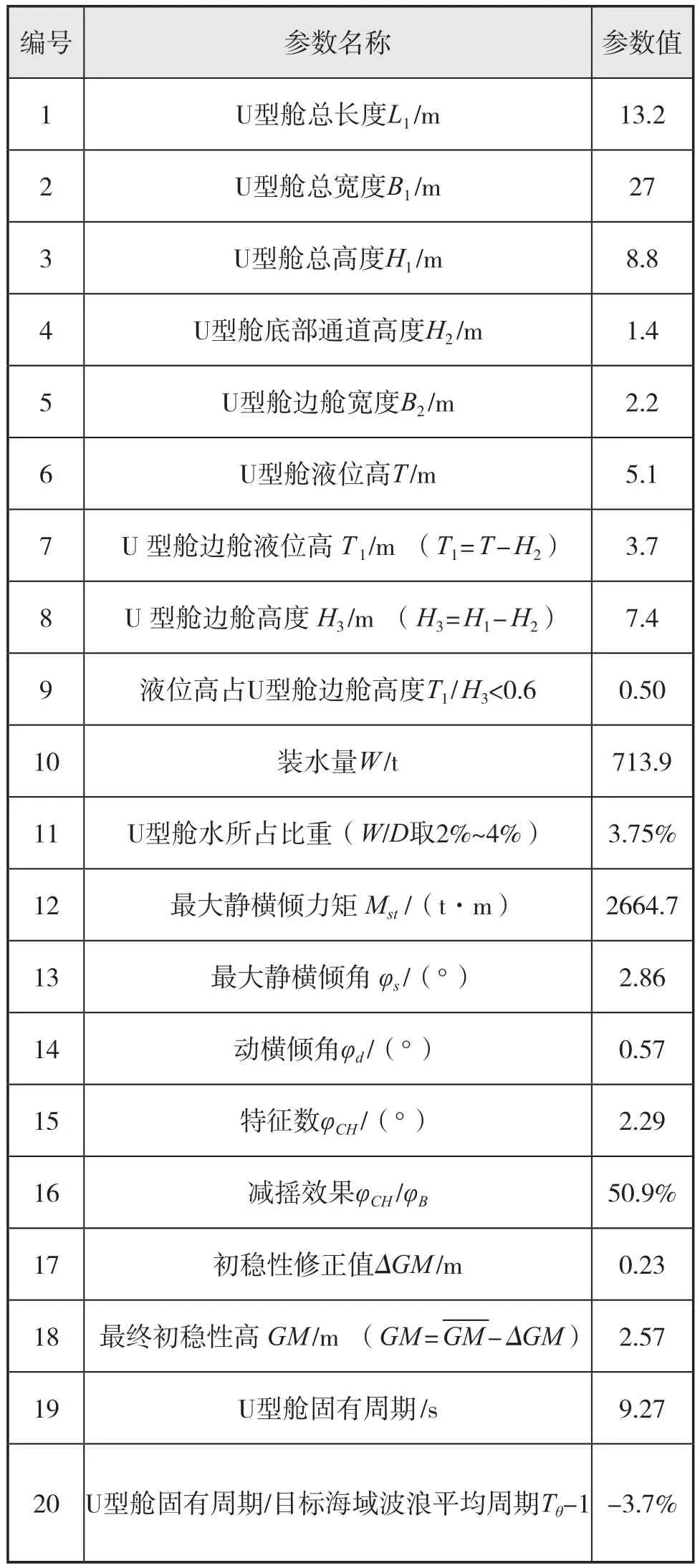
表4 U型减摇水舱参数验证
3 结 论
本文通过分析U型减摇水舱的工作机理(尤其是海洋工程船U型被动可控式减摇水舱的工作机理),根据固有周期的经验估算公式,得到一种在总体设计初期阶段时确定U型水舱的布置及参数的方法,以供设计者参考:
(1)U型减摇水舱的固有周期与U型舱的横剖面参数有关,与U型减摇水舱的总长无关,其中底部通道的高度及边舱的宽度影响较为敏感。
(2)由于U型舱底部通道较长、内部结构构件复杂,故不同方案的U型水舱阻尼均难以准确计算。动横倾角与阻尼也息息相关,目前最有效的方法是试验验证。
(3)U型减摇水舱在设计过程中,应注意结构纵向构件对底部通道的高度影响,设计中保留一定余量,同时应考虑U型横剖面型式在实际应用中存在多样性而带来的影响[5]。
(4)本文有些系数选择采用经验值,工程人员在参考时还应根据实际情况调整。
另外,本文对于部分问题论述较为粗浅,欢迎批评指正。
[1]孙伟.船舶U型减摇水舱控制系统设计及实验研究[D].哈尔滨:哈尔滨工程大学,2006.
[2]杨辉,宋金龙.船舶减摇方式介绍及发展趋势[J].江苏船舶,2007(4):10-12.
[3]吴秀恒,张乐文,王仁康.船舶操纵性与耐波性[M].北京:人民交通出版社,1988.
[4]杨宏,付敬亮.U型减摇水舱优化设计[J].中国水运,2012(11):165-166.
[5]Ooms J.The Use of Roll Stabilizer Fins at Zero Speed[R].Amsterdam:Quantum Controls BV,2002.
Design of U-shaped anti-rolling tank for offshore construction vessels
WEI Zhi-yuan ZHONG Wei-dong
(Marine Design & Research Institute of China, Shanghai 200011, China)
This paper investigates the initial design stage of the U-shaped anti-rolling tank by the empirical formula combined with the design experience.Firstly, the operation principle, anti-rolling parameter and natural period of the U-shaped anti-rolling tank are analyzed.Then, the suitable hull form, arrangement location, design constraint and effect evaluation are studied for the design process for a passively controlled anti-rolling tank.Finally, an anti-rolling tank of the target ship is designed for the validation.
offshore construction vessel (OCV); U-shaped anti-rolling tank; passively controlled; rolling natural period; design process
U661.32
A
1001-9855(2016)06-0006-06
2016-06-16;
2016-06-30
尉志源(1988-),男,工程师,研究方向:船舶总体设计。仲伟东(1979-),男,硕士,高级工程师,研究方向:船舶总体设计。
10.19423/j.cnki.31-1561/u.2016.06.006