空化对电磁计程仪传感器的影响
2017-01-10张宁
张 宁
(海军驻上海地区舰艇设计研究军代表室 上海200011)
空化对电磁计程仪传感器的影响
张 宁
(海军驻上海地区舰艇设计研究军代表室 上海200011)
以某型出口国外13米级高速艇为研究对象,具体分析一例电磁计程仪在高速情况下引起的失捕现象。首先介绍电磁计程仪传感器的工作原理,对船体断阶处容易产生空泡及其危害进行理论分析,接着对传感器安装处进行压力分布仿真分析。最后得出结论:在满足一定船速和水温的条件下,换能器突出船底产生气泡将导致电磁计程仪无法测速。
空化;电磁计程仪;高速艇;船舶流体力学
引 言
某13米级高速艇目前在安装使用的计程仪为电磁式计程仪。该艇在0~30 kn(1 kn=0.514 m/s)航速行驶时,测速精度在允许误差范围内;当艇速高于30 kn后,电磁计程仪测速误差开始偏大;当艇速达到50 kn时,电磁计程仪测速却显示当前艇速为1~2 kn。分析后认为,致使电磁计程仪产生上述测速偏差的原因是在高速工况下所产生的空化现象。下面对分析过程进行阐述。
1 电磁计程仪传感器工作原理
传感器是电磁计程仪的一个敏感元件,将非电量的船舶速度变换为与航速成正比的电信号。电磁计程仪的传感器分为平面式和导杆式两种,工作原理完全相同,即根据法拉第电磁感应定律,将船舶相对于水的运动速度转换为感应电动势,从而产生航速信号。[1]13米级高速艇采用的是平面式传感器,其结构原理如下页图1所示。
倒“山”字形铁芯的中间柱上绕有励磁绕组,沿船舶横向安装在船底板开孔处。传感器的底部表面是环氧树脂及防腐涂层,在涂层表面上装有一对距离为L的不锈钢制成的电极a、b,用来检测感应电动势,电极之间及周围用非导磁性绝缘材料填封,防止移动。当励磁绕组通入交流电时,便产生交变磁场,磁力线从铁芯的中间柱出发,经过船底海水介质和铁芯两侧边柱形成回路(如图1中虚线所示)。
当船舶航行时,水流即以船舶航速V相反的方向流过船底,因海水是导电的,两电极之间的海水流动可以看成无数根沿船舶横向排列的导体作平行移动,并切割传感器的磁力线,于是在两个电极a、b之间便产生感应电动势Eg。Eg与船速V成正比,只要测得Eg就可求出船速V。[1]
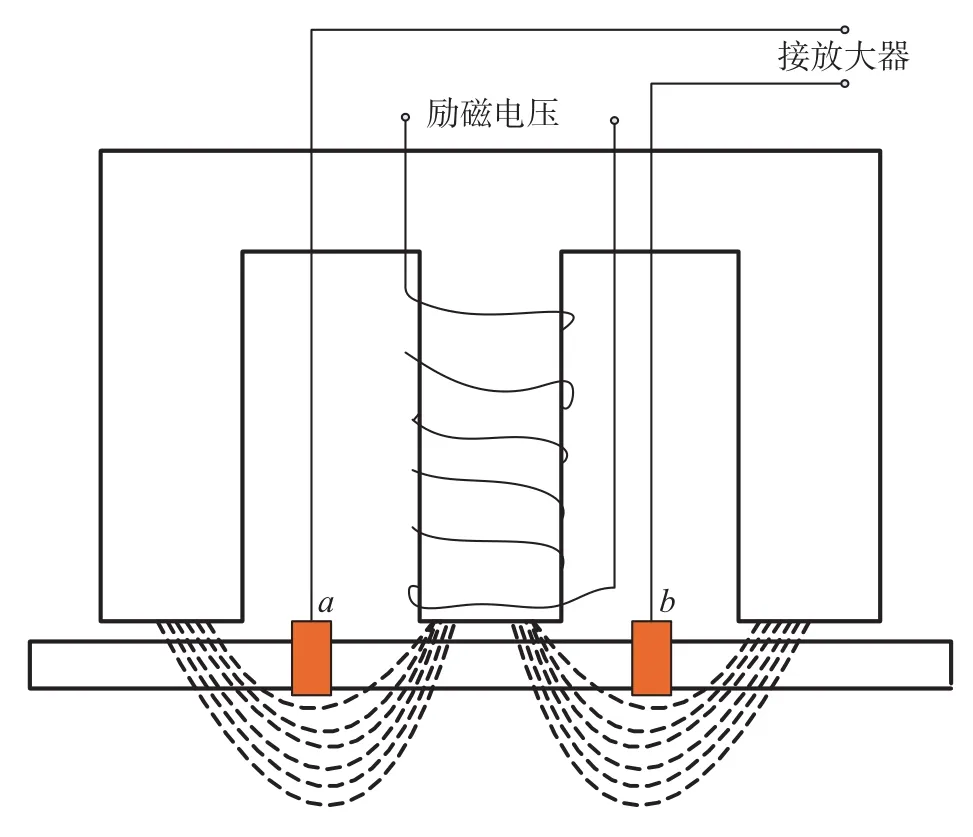
图1 平面式传感器结构原理图
2 船体断阶处产生空泡的理论分析
13米级高速艇在高速滑行状态时,质量主要依靠艇底水动力产生的升力来支持,这时高速艇吃水与浸湿长度都显著减小,且浸湿面积的减小与速度的平方成反比。[2]
为提高滑行效率,沿艇底的纵向有两处断阶,由于存在断阶,艇底的肋骨断面出现不连续的阶梯形状,水流流经断阶时离开艇底,在断阶后形成空穴,经过一定距离后再与第二阶艇底接触。这使艇底在断阶前后形成两个滑行面,每个滑行面的长度较短,即有较大的展弦比,从而提高滑行面的效率。此外,由于断阶可使浸湿表面积减小,因此可进一步降低滑行状态下的静水阻力。
但是由于船底板的突然阶梯弯折,使水流至断阶处边界层分离,当艇速较高时会在断阶处形成漩涡,如图2所示。

图2 13米级高速艇断阶示意图
漩涡中心的压力非常低,并且随着航速的增加,漩涡中心的压力会随之降低,当压力降低至水的汽化压力时,水中的空气微核开始迅速膨胀,形成空泡,便产生空化现象。断阶除产生空化现象外,由于空泡在低压区形成,随水流进入高压区以后,在高压区溃灭。空泡在艇底高压区溃灭时会产生高速微射流射向艇底板,对艇底板及接触式计程仪的平面传感器产生侵蚀现象。[3]
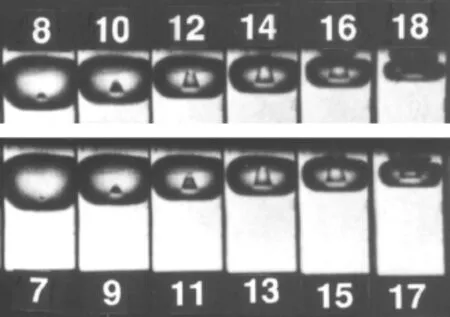
图3 空泡溃灭时的微射流的形成过程
图3所示为Tomita和Shima在1990年用高速摄像机拍摄的空泡在固壁附近溃灭时的一组著名照片,展示了空泡溃灭的整个过程。每张照片的拍摄间隔为2 μs,照片的上部为固壁;空泡溃灭时还会产生很大的冲击波,使周围流场压力骤然增大,甚至高达数百大气压。
螺旋桨在水下高速旋转时,桨叶上的水流速度越大、压力也就越低,当压力低于水的汽化压力时,空泡便产生。图4展示了空泡溃灭对螺旋桨的桨叶的侵蚀。同理,断阶产生的空泡对传感器表面的侵蚀现象也是存在的,长期高速航行使突出艇体的平面传感器不平整,最终会影响计程仪的测速精度。

图4 空泡溃灭对螺旋桨叶面的侵蚀
3 传感器安装处压力分布仿真分析
13米级高速艇上所使用的平面式传感器,其下底面高出艇底板3 mm,如图5所示。
虽然仅有3 mm的高度差,但在艇高速行驶时,如20 m/s甚至更高速度,此高度差足以改变传感器周围水流场的特性,并导致电磁式计程仪无法测速。
下面针对此问题进行Fluent仿真,并进行分析[4]。
传感器的长度选用100 mm,取左边阶梯处为坐标0点,右边为来流方向。图6显示的是传感器安装处的网格模型,这是网格模型放大之后的显示效果。

图5 传感器安装示意图
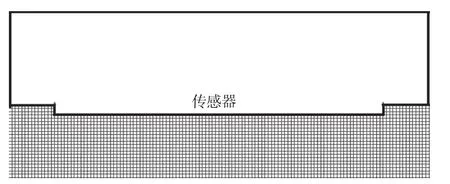
图6 传感器安装处的网格模型
将修改后的13米级高速艇网格模型导入Fluent中进行仿真,设置来流速度为20 m/s,水的汽化压力为2 367.9 Pa。对仿真结果进行后处理,得到如图7所示的空泡云图。
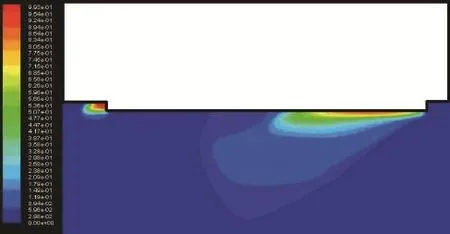
图7 传感器安装处的空泡云图
从图7明显可见,由于电磁计程仪传感器的下底面高出艇底板3 mm,导致传感器在来流方向的一边,即图6中显示的右边阶梯处出现空化现象,其原因是传感器安装处突出船底板,导致传感器下底面的流体流速增加,根据伯努利方程[5]可知:随着流速增加,传感器下底面的压力便会降低;当压力降低至水的气化压力2 367.9 Pa时,空化现象便会产生。传感器下底面的压力分布曲线如图8所示。
表1是水的气化压力值。在某一水温条件下低于对应的气化压力时,水便发生气化现象,不同温度对应于不同的气化压力。由图8可见,传感器下底面的压力值在来流方向的一边最低,最低值从表2查出为2 173,低于仿真时设置的水的气化压力2 367.9,因此空化现象一定会发生。

图8 传感器下底面的压力分布曲线
表2为传感器下底面的部分压力数值,第一列为位置量,起始零点在左边阶梯处,右边阶梯处坐标为100 mm,传感器来流方向与增长方向相反,第二列为每个位置点所对应的压力值。

表1 水的气化压力值
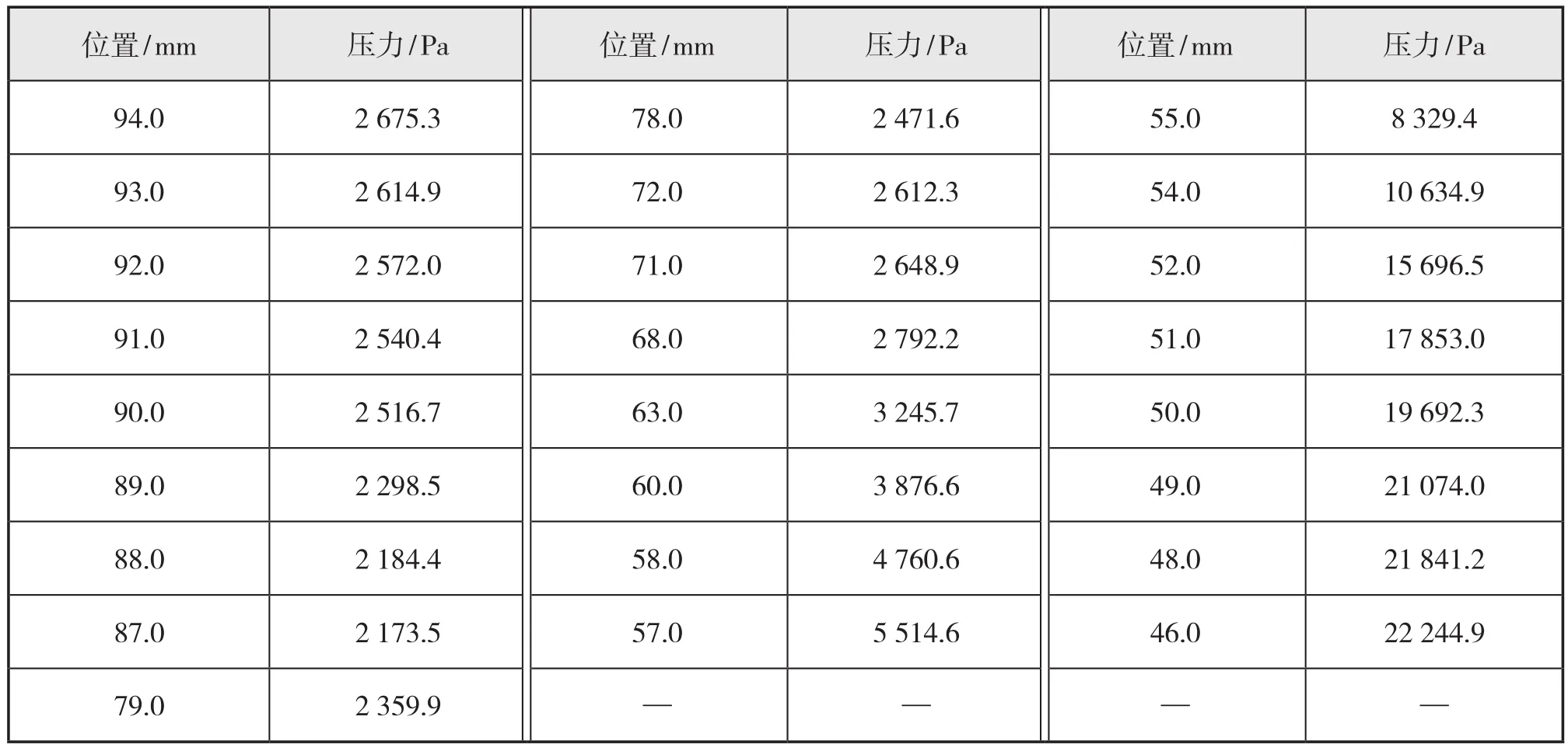
表2 传感器下底面的部分压力值
仿真中设置的来流速度为20 m/s,水的气化压力为2 367.9 Pa,13米级高速艇的理论最高航速远高于20 m/s。随着航速的增高,如从20 m/s向上增高,电磁计程仪传感器安装处的空化现象会更加剧烈。同时,从表1可知,随着水温增高,水的气化压力也随之增高,从而加剧空化现象。
空化现象分为三个阶段:气泡状空泡、片状空泡和全空泡,见图9。

图9 空泡发展图
随着空化现象的加剧,电磁计程仪传感器的下底面会依次经历气泡状空泡、片状空泡,直至全空泡。
4 结 论
空泡即气泡,其内部为空气和水蒸气,无法切割磁力线,所以电磁计程仪传感器周围的空泡增多会严重影响海水切割磁力线,并影响测速精度。当传感器下底面为全空泡时,空泡腔会包围传感器下底面,当两个电极处于空泡腔内部时,电极被气体包围而无法导电,直接导致电磁计程仪无法测速。从理论分析和计算机仿真结果来看,船底的各类断阶在船舶设计中是必须要考虑的问题。断阶产生空泡的两个必要条件是水温和船速,高水温和过快的船速更容易产生空泡,导致安装于船底的水声设备无法工作。另外,船体各类构件长期在空泡中工作,产生的侵蚀也是不容忽视的问题。以上对换能器突出船体3 mm的分析不仅适用于水声设备的换能器,也适用于各种突出和凸进船体的各种构件如碰垫、首侧推等。
对于中低速航行的排水型船来说,计程仪一般安装在自船首柱起船长的1/3到1/2 处,以保证该船在最小吃水和最大摇摆时传感器不会露出水面。但高速艇在高速航行时,由于吃水浅、有断阶和尾倾导致其艇底的流场特性与低速时有很大的不同。首先,如上文分析,断阶产生的空化现象使安装在艇体中部的计程仪测速误差较大;其次,高速艇首部流场复杂,水流速度和压力变化与艇速不是线性关系,计程仪无法修正,所以安装在首部也有较大的测速误差;另外,由于螺旋桨和机舱在尾部,计程仪较难布置,所以很少在船尾安装计程仪。高速艇(包括气垫船等船型)较好的解决方式是使用无线多普勒计程仪,传感器安装在水线以上,从而解决了接触式计程仪受水流场影响较大的问题。
[1]中国船舶工业总公司.船舶设计手册:电气分册[M].北京:国防工业出版社,1997:597-602.
[2]董祖舜.快艇动力学[M].武汉:华中理工大学出版社,1991:43-45.
[3]张宁.不同种类计程仪在高速船上运用效果分析[J].船舶,2014(6):86-87.
[4]常欣.Fluent船舶流体力学仿真计算工程应用基础[M].哈尔滨工程大学出版社,2011:14-75.
[5]夏国泽.船舶流体力学[M].武汉:华中科技大学出版社,2003:45-50.
Inf uence of cavitation on electromagnetic log sensor
ZHANG Ning
(Naval Representative Off ce of Warship Design & Research, Shanghai 200011,China)
Taking example by a 13 m high-speed vessel exported abroad, this paper analyzes a case of electromagnetic log signal missing under the high speed condition.It introduces the working principle of the electromagnetic log sensor, and theoretically analyzes the cavitation at the ship stepped bottom and its hindrance.Then it numerically simulates the pressure distribution of the installation site of the sensor.It finally concludes that the cavitation will be caused by the transducer standing outside the hull bottom at a certain ship speed and water temperature, thus leading the electromagnetic log unable to measure velocities.
cavitation; electromagnetic log; high-speed vessel; ship flow mechanics
U666.152
A
1001-9855(2016)06-0076-05
2016-04-22;
2016-05-13
张 宁(1968-),男,硕士,高级工程师,研究方向:舰船设计审查。
10.19423/j.cnki.31-1561/u.2016.06.076