基于牵连补偿算法的喷管摆动控制系统设计①
2017-01-05李信元夏云峰赵建辉
赵 亮,李信元,郝 俸,张 科,夏云峰,赵建辉
(1.中国航天科技集团公司四院四十一所,西安 710025;2.西北工业大学,西安 710072;3.中国航天科技集团公司四院401所,西安 710025;4.空军西安飞行学院,西安 710306)
基于牵连补偿算法的喷管摆动控制系统设计①
赵 亮1,2,李信元1,郝 俸3,张 科2,夏云峰1,赵建辉4
(1.中国航天科技集团公司四院四十一所,西安 710025;2.西北工业大学,西安 710072;3.中国航天科技集团公司四院401所,西安 710025;4.空军西安飞行学院,西安 710306)
为了消除驱动喷管摆动的2个作动器间的牵连效应,确保控制指令精确,利用旋转矩阵原理,计算喷管摆动时2路作动器的伸长量,进一步设计出用于前摆心深潜入式喷管的摆动控制系统。试验结果显示,4°单摆时牵连摆角占最大摆角比值较大(7.15%),补偿计算后最大牵连摆角仅为0.002°,从而验证了该方法能通过消除牵连效应提高全轴摆动喷管的控制精度。
牵连补偿;摆动喷管;控制系统
0 引言
推力向量控制技术是通过改变火箭发动机或其他动力装置产生的燃气流方向来控制导弹的飞行方向和姿态角[1]。固体火箭飞行姿态是由伺服控制系统控制喷管的摆动而改变火箭推力方向达到的[2-3]。对于大机动、高速战术导弹常采用的前摆心深潜入结构形式的全轴摆动喷管,研究喷管摆动的控制对推力向量控制的精度尤为重要。
全轴摆动喷管实现摆动的驱动装置是2路互成90°夹角作动器的伺服机构,通常当一个方向伺服作动器运动时,另一个方向作动器由于存在机械限制,使喷管除了主要向摆动作动器活塞杆方向运动之外,也将在另一个作动器方向产生移动,这就是牵连效应[4-5]。伺服机构的控制方案分为理想状态和非理想状态,理想状态是2路作动器不发生牵连,每路作动器伸缩时正负摆角对称,否则为非理想状态,对于战略导弹常采用的后摆心结构形式的喷管,作动器的牵连作用影响作用比较小,一般情况下可忽略[6]。而对于某战术型号上采用的前摆心深潜入式的喷管,由于喷管尺寸、结构等方面的限制,在推力向量控制过程中不能忽略2个方向的上相互牵连,为提高控制精度,需要考虑牵连效应对喷管摆动的影响,把非设计状态控制在一定范围内,文献[7]利用ADAMS软件建立轴对称推力矢量控制伺服机构的虚拟样机来分析牵连干扰和正负摆角不对称,优化了伺服机构的布局;工程上也常利用摆角反馈信号对指令控制信号进行补偿修正,但由于伺服机构及摆角传感器的响应速度等限制,控制很难达到实时补偿。
本文首先利用牵连补偿算法,对俯仰和偏航2个方向上的作动器的控制指令进行了补偿计算,并基于此算法设计出适用于前摆心深潜入式喷管摆动试验的控制系统,试验结果显示,利用此算法建立的控制系统能够改善推力向量控制精度。
1 系统组成及原理
1.1 硬件组成
图1为系统的构成原理框图,测控软件中内嵌牵连补偿算法,对指令信号和采集信号进行牵连补偿计算;模拟信号输出模块和信号调理模块按指令信号控制作动器动作;作动器接受指令信号控制作动器伸长,驱动喷管摆动,利用传感器将信号传递至信号调理模块;模拟信号采集模块将传感器的伸长量反馈至测控计算机,通过系统牵连补偿算法逆运算,将伸长量转化为喷管摆动角度数据。

图1 牵连摆动控制系统硬件原理图Fig.1 Hardware schematic diagram for coupled swing control system
1.2 算法原理
1.2.1 喷管空间坐标系定义
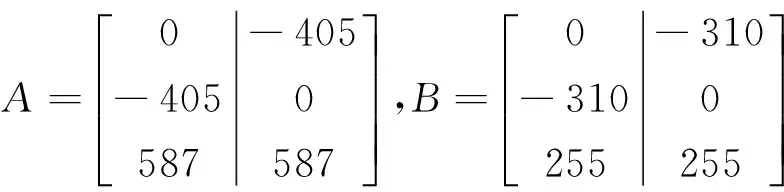
图2为喷管伺服作动器安装示意图。在此坐标系中,以喷管设计摆心O为原点建立静坐标系,Oz为喷管的设计轴线,Ox、Oy为安装作动器的方位轴,A1B1、A2B2分别安装2路作动器,其对面S1、S2处各安装1个线位移传感器,测量喷管摆动时两方向的位移量。A1、A2分别为2路作动器1、2的下支耳安装孔中心(喷管出口方向为下方),B1、B2为作动器1、2的上支耳安装孔中心,A、B点的坐标可分别表示为
加摆动指令后,为了得到A1B1、A2B22路作动器伸长量,首先需要利用旋转矩阵[8]进行坐标变换。坐标变换仅仅改变矢量方向,而不改变矢量的大小,通过矩阵的坐标变换,可得到俯仰和偏航方向作动器的伸长量,作动器的长度变化,在测量中反映在对面线位移传感器的S1、S2长度变化上。
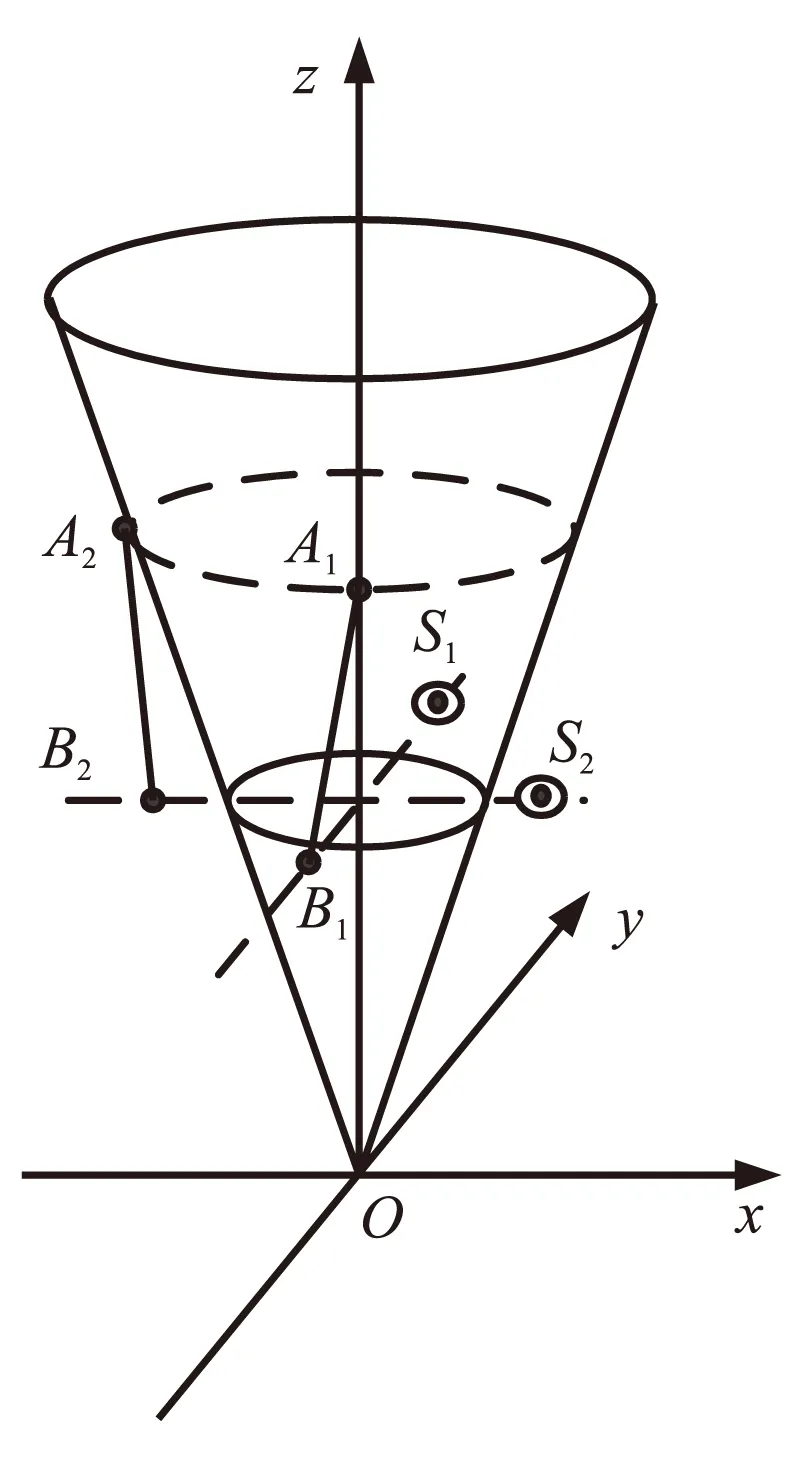
图2 摆动喷管的空间坐标系Fig.2 Space coordinate system for movable nozzle
传感器S1、S2的初始长度分别为
(1)
(2)
关于右手笛卡尔坐标系的x-、y-轴的旋转分别叫做俯仰、偏航旋转,这些旋转被表达为围绕一个轴的旋转,定义喷管俯仰和偏航方向上的姿态输出角分别为q1、q2。Ax、Ay为作动器A1B1、A2B2的摆角,作为输入指令由软件口输入,按控制系统定义,Ax、Ay和q1、q2的转换关系为
(3)
(4)
1.2.2 空间坐标系变换
绕x-轴的主动旋转定义为
绕y-轴的主动旋转为
令
R=RyRx
(5)
进行坐标变换
(6)
坐标A经过坐标变换之后的坐标为G,求得G与B之间的长度即可求得线位移传感器此时长度。
1.2.3 计算伸长量
此时线位移传感器S1的长度可以表示为
(7)
同理,线位移传感器S2的长度可以表示为
(8)
发出摆角指令Ax、Ay后,传感器的长度发生变化。首先通过转换关系可得到俯仰、偏航角度,进而通过M、N、L10、L20的表达式得线位移传感器S1的位移量:
传感器S2的位移量:
1.2.4 牵连补偿逆运算
为了将传感器的位移信号转化为喷管摆角数据,需要利用牵连补偿算法的逆运算和迭代算法,算法如下:令Δq为迭代角增量,Δq=10-6,q10、q20为2个方向角度的初始值,将q1=q10+Δq,q2=q20带入式(3)~式(8),计算得到M1、N1;将q1=q10,q2=q20+Δq,分别计算得到M2、N2。
分别求2个方向的位移量的偏导:
喷管位于零位状态时L10=L20=l0。
令ΔQ1、ΔQ2为每次进行迭代时2个方向的角度变化量,则有以下方程:
可解得
同时将迭代次数置为n=n+1,此时,q1=q10+ΔQ1,q2=q20+ΔQ2。
其中
当作动器满足条件: max{[M-(l0+Δla)],[N-(l0+Δlb)]}<ε(ε是迭代精度,取为10-6)或者n≥30时,跳出循环,如不满足上述2个条件则置:
重新进行迭代求解过程。算法流程图如图3所示。
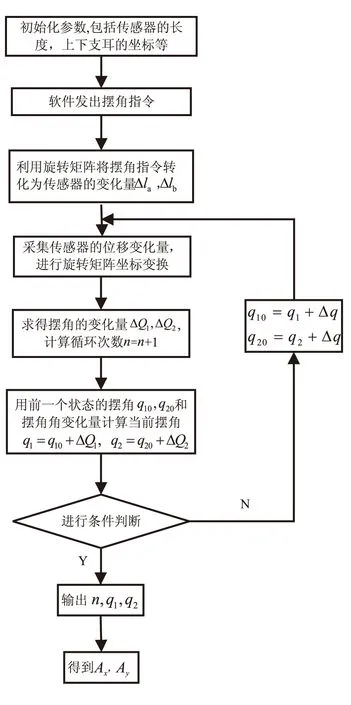
图3 牵连补偿算法流程图Fig.3 Flow chart for coupled compensation algorithm
2 试验研究
摆动控制指令的参数为:频率f=0.2 Hz进行5.66°异向合成摆动和4°单向摆动各1周。坐标值A、B的值分别为
通过算法计算可得到的线位移传感器S1、S2变化规律如图4所示。为了对比,图5给出了不计牵连作用的传感器伸长量的变化曲线。
加入不同的控制指令后,由线位移传感器S1、S2测得的数据经过处理可得到喷管摆角曲线,如图6所示,其中实线为含牵连补偿作用的摆角变化曲线,虚线为不计牵连作用的摆角变化曲线。不计牵连作用时,最大单摆角度3.871°,异相合成5.48°;加入牵连补偿算法后,实际最大单摆角度3.938°,异相合成5.59°。
表1列出了2种情况下分别绕x和y轴单摆的最大摆角和最大合成角度对比。
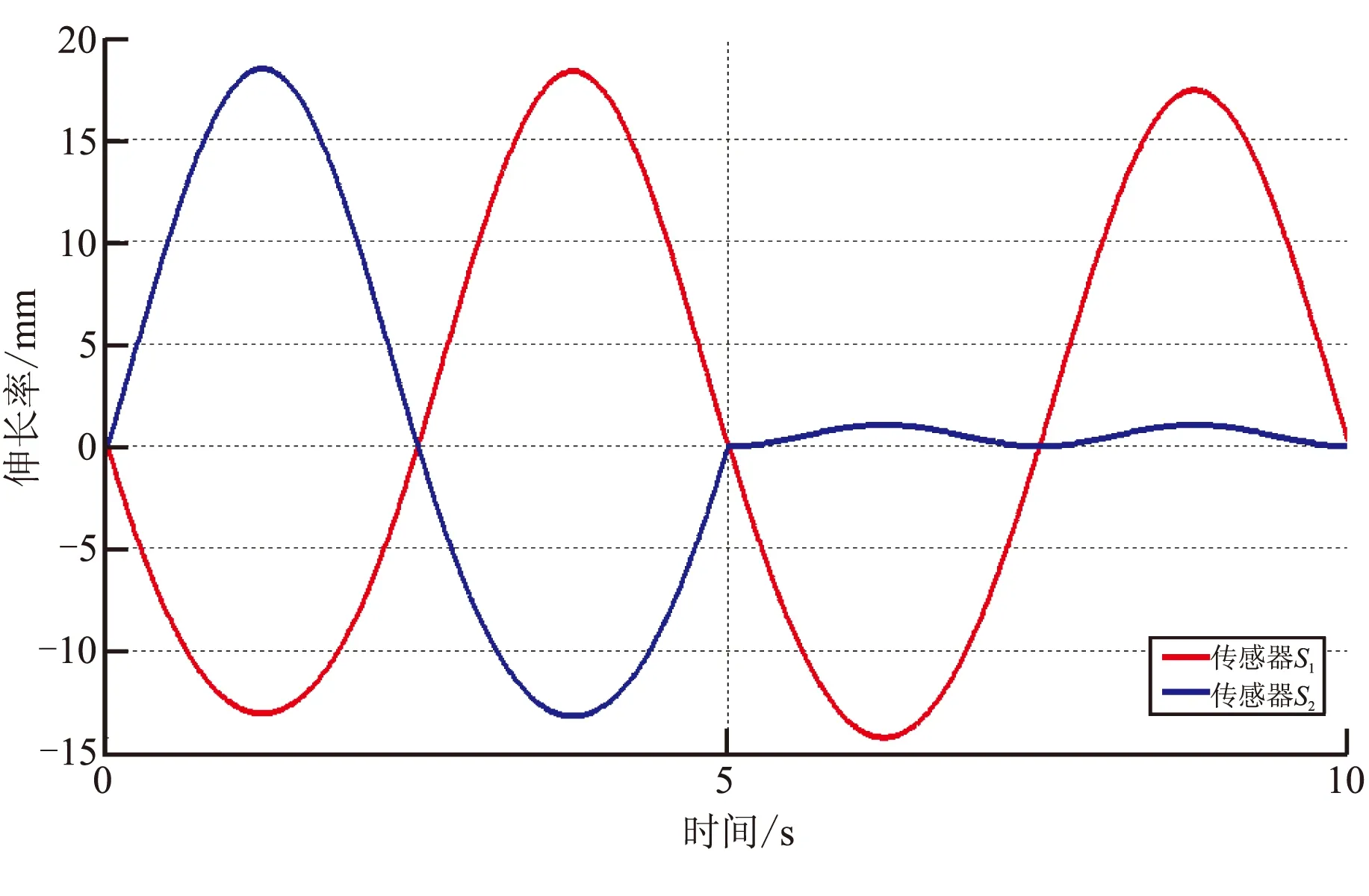
图4 传感器伸长量变化曲线Fig.4 Elongation change curve of sensors

图5 不计牵连时传感器伸长量变化曲线Fig.5 Elongation change curve of sensors when coupling is neglected

图6 摆角曲线对比Fig.6 Comparison of swing angle change curve
从图4和图5的单摆控制指令对比可看出,一路作动器伸长驱动喷管摆动时,互成90°方向的作动器的牵连补偿作用。由图6和表1可见,在指令为4°单摆、不计牵连时,Sx方向上喷管最大摆角为3.871,Sy方向的牵连最大摆角为0.277°,占最大摆角的7.15%;由表1可计算出异向合成的误差减小了1.94%,单向摆动的误差减小了1.5%。
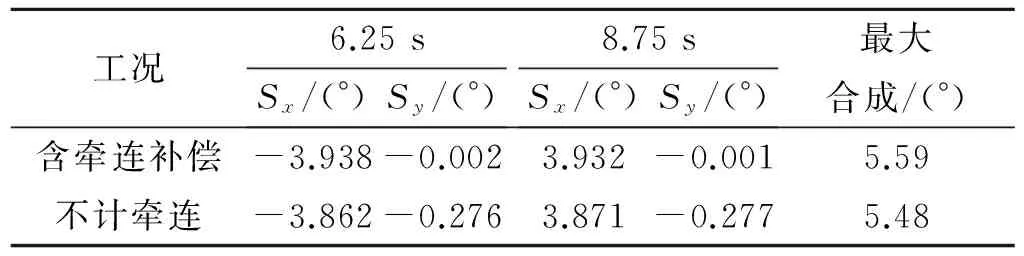
表1 最大单摆和最大合成角度对比Table 1 Comparison of the maximum angle of one-way swing and compound swing
3 结论
(1)前摆心深潜入式喷管的2路作动器之间牵连效应较明显,文中试验所得牵连摆角占最大摆角比值较大(7.15%)。因此,有必要对牵连回路的作动器进行补偿。
(2)利用旋转矩阵算法建立的推力向量控制模型可精确计算出前摆心深潜入式喷管2路作动器的伸长量。采用含牵连补偿算法的方法所得单摆最大摆角和异向合成摆角与真实指令之间的误差比不计牵连时的误差小;而且由表格可看出,利用本文所提出的方法得到的最大牵连摆角仅为0.002°,从而验证了此方法通过消除牵连作用提高推力向量控制的精度。
[1] 朱学平,祁鹏,张晓峰,等.摆动喷管控制导弹鲁棒飞行控制系统设计 [J].固体火箭技术,2013,36(4):427-436.
[2] 陈刚,白效慧,陈晨.珠承喷管压痕影响因素及控制的实验研究[J].固体火箭技术,2012,35(5):619-622.
[3] 毛羽国.柔性喷管动态光电实时测量设备的技术实施[J].光电工程,1999,26(2):9-13.
[4] 郑勇斌.摆动喷管控制精度相关问题讨论[J].现代防御技术,2007,35(3):54-57.
[5] Wassom S R,Faupel L C,Perley T.Integrated aerofin/thrust vector control for tactical missiles[J].Journal of Propulsion and Power,1991,7(3):374-381.
[6] 仲瑞昌.喷管全轴摆动时牵连运动和摆角不对称分析计算[J].固体火箭技术,1996,19(3):1-5.
[7] 李志臣,朱文海.基于虚拟样机技术的轴对称推力矢量控制伺服机构设计[J].现代防御技术,2005,33(6):37-42.
[8] Arfken G.Mathematical methods for physicists,3rd ed.[M].Orlando,FL:Academic Press,1985.
(编辑:吕耀辉)
Design of control system for movable nozzle based on coupled compensation algorithm
ZHAO Liang1,2,LI Xin-yuan1,HAO Feng3,ZHANG Ke2,XIA Yun-feng1,ZHAO Jian-hui4
(1.The 41st Institute of 4th Academy of Aerospace Science and Technology Corporation,Xi’an 710025,China;2.Northwestern Polytechnical University,Xi’an 710072,China;3.The 401st Institute of 4th Academy of Aerospace Science and Technology Corporation,Xi’an 710025,China;4.PLA Air Force Xi’an Flight Academy,Xi’an 710306,China)
In order to eliminate the coupling effects between two actuators driving the nozzle swings, as well as to ensure the precision of control command,the elongation of the two actuators was calculated when the nozzle swung based on the principle of rotation matrix.Further the swing control system for deeply submerged nozzle with front pivot point was designed.The experiment results show when angle of one-way swing reaches 4 degrees, the large ratio(7.15%)between the coupled angle and maximum swing angle exists,the maximum coupled angle is 0.002 degrees only using compensation calculation,and the control precision of the omni-axial movable nozzle through eliminating the coupling effects can be improved greatly by the method proposed in this paper.
coupled compensation;movable nozzle;control system
2016-01-21;
2016-03-07。
赵亮(1987—),男,博士生,研究方向为导航、制导与控制。E-mail:zhaoliangbuct@126.com
V435
A
1006-2793(2016)06-0755-04
10.7673/j.issn.1006-2793.2016.06.004
