城市轨道交通车辆与信号主要接口问题分析
2017-01-04何玉琴
何玉琴 张 潜
(南京地铁建设有限责任公司,210017,南京∥第一作者,高级工程师)
城市轨道交通车辆与信号主要接口问题分析
何玉琴 张 潜
(南京地铁建设有限责任公司,210017,南京∥第一作者,高级工程师)
总结了近10多年来南京地铁建设过程中出现过的安装接口问题和车辆与信号接口问题,梳理了需要在设计阶段注意的接口事项,提出了解决途径和建议。
城市轨道交通; 车辆; 信号; 接口
Author′s address Nanjing Metro Construction Co.,Ltd.,210017,Nanjing,China
南京地铁自2000年开工建设以来,出现了不少车辆与信号接口问题。接口问题解决不当会影响列车的功能或性能,甚至会影响列车的正常运行。本文将10多年来南京地铁建设中遇到的车辆与信号接口问题加以梳理。这些接口事项在设计阶段就需要重点关注,并在设计阶段通过充分沟通协商来解决、尽量避免在调试阶段甚至在运营阶段才出现问题。
1 安装接口问题
南京地铁1号线车辆出现过底架天线支架开裂、天线支架刚度不够及雷达安装位置不恰当等机械类问题。机械方面的问题通常在车辆运行一段时间才能暴露。新项目的天线支架不仅要做有限元计算,还要进行疲劳试验,以确保天线支架有足够的强度、刚度及使用寿命。
支架刚度容易被忽视。一旦支架刚度不够则在运行过程中会产生支架变形,从而导致天线开裂。
安装雷达时需注意避免将雷达的工作面靠近轮对,以免轮对甩出的雨水污染雷达工作面。
2 车辆与信号接口问题
2.1 驾驶模式定义
在车辆设计阶段,应将司机控制器(简为“司控器”)的驾驶模式定义及划分详细告知信号系统设计方,并提交不同驾驶模式下的司控器触点闭合表。地铁车辆司控器通常有模式选择开关+司机操作手柄(DCH)和方式方向手柄+DCH两种型式。驾驶模式包括列车自动运行(ATO)、手动驾驶(CM)、限速向前(RMF)、洗车(WM)、关断(OFF)、限速向后(RMR)等。每个驾驶模式均包含方向信号。RMF、WM和RMR模式包含车辆的限速控制指令,使车辆根据司控器的驾驶模式进行限速控制。其中,RMF模式限速25 km/h,WM模式限速3 km/h,RMR模式限速10 km/h。这些限速不受信号系统的限速控制。信号系统限制模式下限速25 km/h,可以与车辆的RMF模式整合在一起。DCH仅提供方向信号。其他驾驶模式需要通过按钮或开关来切换。
ATO模式下DCH是否机械联锁也要提前告知信号系统设计方。若有机械联锁,则ATO模式下DCH无法操作,司机不能干预ATO驾驶;若无机械联锁,则车辆需要进行电气联锁设置,即在ATO模式和自动折返模式下,来自ATO的牵引和制动指令是有效的,来自DCH的指令需屏蔽。司控器通常有快速制动档位,对于来自司控器的快速制动指令是否有效应由车辆与信号专业设计商定。
2.2 无人自动折返时序定义
列车折返可分为ATO模式下的无人自动折返、ATP(列车自动防护)监督下的人工折返模式及限制人工折返模式、非限制人工折返模式。最复杂的折返模式是ATO驾驶模式无人自动折返。此模式下,信号系统应在设计阶段将折返时序提供给车辆专业,并详细说明在不同的时序下车辆应执行什么指令;车辆专业设计人员应根据信号系统的时序要求绘制出相应的继电器、开关或按钮的工作状态,并和信号系统专业设计人员进行确认,确保在理论上自动折返功能能够实现;最终,须在首列列车信号系统调试时进行验证。
不同信号系统的无人自动折返控制逻辑不同。有的要求列车在转换轨执行列车换向/换端命令,列车执行“前进”指令;有的则要求在站台执行换向/换端命令,列车执行“后退”指令。
不同的控制逻辑对车辆的要求不同,要求执行“后退”指令的信号系统通常要求车辆换端时不能断开高速断路器,若高速断路器(简称“高断”)断开,由于重新闭合高断时牵引主回路中的充电回路充电需要时间,将会影响折返效率。
南京机场线首列列车在试车线上测试无人折返功能。按照无人折返的操作步骤进行测试时,车载信号主机(VOBC)发出牵引受阻告警,施加紧急制动,系统未能正常进入无人折返运行状态。无人折返的操作步骤如下:
(1) 列车位于终点站,需要折返;
(2) 将两个驾驶室模式选择开关(MSS)都置于关断位置;
(3) 司机激活无人折返请求(DMR)按钮至少0.5 s;
(4) VOBC获得所有的门关闭并锁闭状态;
(5) ①司机拔掉钥匙,并且没有驾驶室被激活,VOBC 施加紧急制动;②VOBC输出无人折返模式使能(DME)信号,VOBC 进入“DTB”(无人折返)模式,VOBC输出缓解紧急制动请求;③VOBC开始无人折返模式,输出牵引信号,自动控制列车进入折返轨。
经过分析,找出了折返失败的原因:在无人折返的第(5)步的①项,当司机拔钥匙,且VOBC施加紧急制动后,车辆的牵引系统断开了高断。一旦高断断开,缓解EB 后,需要10 s左右车辆才能执行正常的牵引指令。所以当无人折返操作进入第(3)步的③项、VOBC 进入“DTB”模式输出缓解紧急制动的请求、并输出牵引电流给牵引系统时,牵引系统无法立即执ATO 牵引力输出(要等10 s左右);在此时间内,VOBC 的牵引受阻保护功能(VOBC保护牵引系统的一种功能,即VOBC 输出牵引电流9 s后,如果车辆运行距离少于1 m,则判定为牵引受阻,VOBC自动施加紧急制动)起作用,无人折返操作失败。
可从两个方面着手解决:一是车辆修改设计,在非蘑菇按钮触发的紧急制动中不断开高断;二是信号系统延迟牵引受阻保护功能的触发,但可能会影响折返效率,120 s内难以完成无人折返功能。
2.3 列车完整性要求
信号系统需要车辆提供列车完整性信号。列车完整性信号通常通过车端跨接电缆的方式提供,也有的通过触点式车钩连接器的方式提供。由于触点式车钩连接器在运行中不断承受压力和拉力,很可能会出现触点抖动现象。而且会极易被信号系统采集到(信号系统的扫描周期为几十毫秒)。一旦信号系统采集到抖动信号,就会认为列车完整性被破坏,进而触发紧急制动。
车辆专业对于列车的完整性,已做了充分考虑。一旦列车意外脱钩,就会气路断开,并立即很快触发紧急制动。有的项目还设计了“双重保险”:在车钩连接面上设有触点或行程开关,一旦气路断开,触点就会断开,从而触发紧急制动。但用于车辆紧急制动回路的触点式车钩连接器触点抖动不会导致列车触发紧急制动,因为触点抖动时间不足以让紧急制动继电器失电动作,列车的完整性不会受到影响。故建议列车完整性信号采取跨接电缆方式传输。
2.4 最高限速值的确定
信号系统的最高限速取决于线路限速。最高运行速度为80 km/h的线路实际可能只有约75 km/h。这是因为:虽然按土建专业的限速是80 km/h,但信号系统有安全防护距离,故最高运行速度会低于土建限速。运营方应在初步设计阶段对线路设计单位提出土建限速为85~90 km/h的要求,以保证实际最高运营速度能达到80 km/h。
车辆有超速保护。作为最后一级限速保护,车辆的限速要高于信号,且不能干预信号系统的速度控制。车辆运行最高速度的限值需要车辆及信号系统共同商定。
2.5 信号冗余时的控制策略
不同的信号系统在ATP发生冗余故障时的控制策略各不相同,有的会输出紧急制动指令,有的不能输出有效控制指令,故车辆须按照其要求保持冗余前的控制指令或优化控制指令。
如信号系统在ATP冗余故障时输出紧急制动指令,则车辆根据信号系统的要求自动恢复运行,而不必停下来后重新起动。为此,车辆需要在设计阶段结合信号系统发出的指令(如旁路零速、紧制复位及紧制缓解等)搭建好冗余切换成功后紧急制动自动缓解、牵引恢复的电路。
如信号系统在ATP冗余时不能输出有效控制指令,也通常会要求车辆在ATP切换过程中保持冗余前的控制指令。ATP 正常切换时间为500 ms左右,且故障应该导向安全。建议如果列车在冗余前处于牵引状态,则冗余过程中会改为惰行状态;如果列车在冗余前处于制动状态,则冗余过程中列车会保持制动状态;如果列车在冗余前是惰行状态,则冗余过程中列车保持惰行状态。ATP 冗余故障瞬间,若列车在折返线及试车线线路终点区段,则司机需谨慎观察,以免发生安全事故。
2.6 自动报站
列车车载广播设有自动报站功能。在自动报站模式下,列车应能根据位置信息和车站代码自动进行广播。自动报站所需的位置信息和车站代码来源于信号系统。信号系统应将位置信息、车站代码及开门侧等信息提供给车辆,且不应设置限制条件。
只要信号系统设备正常工作,司机既可以在ATO模式下,也可以在手动驾驶模式下选择自动报站模式。有些线路的信号系统只允许车辆在ATO模式下使用自动报站功能,但列车在停站时其系统又必须切换到人工驾驶模式,从而导致自动报站功能无法使用,给司机带来了不必要的麻烦。
除此之外,信号系统需在设计阶段将详细的车站代码定义提供给车辆,有的信号系统设有虚拟站台,应一并提供给车辆,以便于准确报站。
需要注意的是,为了提高服务质量,在自动报站模式下,信号系统应在起点站发车前提供目的地和下一站代码。在此之前客室内显示器及目的地显示器均显示“××地铁欢迎您”或其他字样,并将动态地图显示黑屏,以免引起乘客误会。
2.7 车门控制
在信号控制模式下,在不同的城市DCH激活后会有不同的处理。有的城市的DCH激活时列车尚在站台区域且列车速度低于5 km/h则触发紧急制动,如列车速度高于5 km/h则列车运行到下一站。有的城市全程监控,任何时候激活DCH都会触发紧急制动。为此,有的城市专门研究制定了相应规范。
由于乘客遇到特殊情况激活DCH后,若列车触发紧急制动停在区间也无法解决问题,反而会延误事情的处理。因此,区间运行的列车不应触发紧急制动停车,而应继续运行到下一站再停车开门。
若列车在区间内停车且无法起动,则乘客激活DCH后可由司机在延时时间内决定是否允许乘客手动打开车门;如果司机在延时时间内未进行操作,则乘客可手动打开车门;若司机在延时时间内进行操作,则车门不可以被乘客手动打开。若列车控制电路失电,则DCH激活后应能手动打开车门。
信号系统对于车门的监控是必要的,但不一定以监控DCH为目标。因此,DCH激活后车门应仅仅是解锁,且在列车运行中乘客并不能手动打开车门,只有在零速条件下车门才能被打开。
建议车门设置“关到位”限位开关,信号系统监控该开关,一旦“关到位”限位开关离开“门关好”位置,信号系统应立即触发紧急制动。
还有一种特殊情况:当列车停靠在站台且车门打开状态下,如果主控车载信号主机死机时,则信号系统会要求车门保持原来状态,而门使能信号会丢失。如车辆设计阶段已考虑要求,则增加零速列车线并搭建满足其要求的逻辑控制电路,否则车门只能执行关闭指令。
2.8 湿轨切线方向的紧急制动减速度(GEBR)值
信号系统要求车辆提供湿轨条件下的GEBR值以作为信号设计安全防护距离的输入值之一。
空气制动属于黏着制动,即利用车轮与轨面之间的黏着力进行制动。车辆减速度与黏着系数之间的关系为:
(1)
式中:
ae——列车等效瞬时减速度;
μ——粘着系数;
g——重力加速度;
η——防滑效率,通常大于85%。
当车辆发生滑行时,车辆本身防滑系统会进行防滑保护,以防止轮对擦伤。
(2)
可见,ae与μ线性比例关系。
轨道黏着条件受到雨雪、雾霾、霜露等环境条件以及轨面洁净程度等因素影响。同时,与平直道相比,在下坡工况下,车辆产生相同的减速度所需要的轨道粘着系数更大。车辆实际能够达到的减速度与轨道黏着条件密切相关,属于客观物理特性。在湿轨条件下,轮轨黏着条件难以保证,通常提供给信号系统一辆车的制动失效时的GEBR值,或者提供特定条件下GEBR值。(如南京机场线的GEBR值为0.85 m/s2,紧急制动所需黏着系数为0.14。)车辆同时要将制动过程(含响应时间)告知信号方。车辆从收到制动命令到建立10%压力和继电器响应时间(即空走时间)t10是固定的,无论制动起始速度是多少,t10都是相同的。车辆提供给信号系统的GEBR值要扣除t10。列车制动等效时间计算曲线见图1。
图1中,
式中:
t10——空走时间;
te——等效响应时间;
t90——响应时间;
v0——初速度;
s3——制动距离。
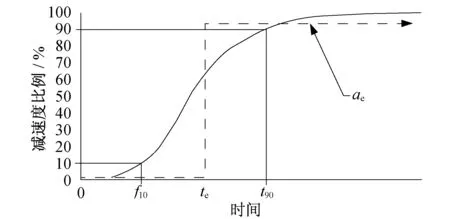
图1 列车制动等效时间计算曲线
车辆提供的GEBR都是在特定条件下的数值。这在设计联络阶段要详细说明。
2.9 滑行控制
车辆具有滑行保护功能。在制动过程中一旦检测到轮对滑行,车辆会根据打滑严重程度降低制动力,以免轮对擦伤。在严重滑行时会将制动力降到零。车辆滑行保护控制是为了更好地利用最大黏着力,有效控制制动距离。在ATO模式下,由于车辆滑行保护时的制动力会降低,故短时间内达不到信号系统所要求的减速度。信号系统若因此要求加大减速度将会导致车辆滑行加剧,难以恢复到正常状态。故信号系统在设计阶段要慎重考虑车辆滑行时的控制策略,根据车辆发送的滑行信号进行控制。
在设计阶段用户要关注信号供应商对车辆滑行期间的控制策略,要防止在ATO模式下因滑行而引发紧急制动。尤其在高架和地面线路上,由于这种线路在不良天气下易出现打滑现象,故信号系统应在设计阶段充分考虑安全可靠的控制策略,否则会出现区间紧急制动或站台区域紧急制动冲标,进而影响正常运营。虽然有的信号系统有“雨天”模式,且会在“雨天”模式下采用较小的制动力以降低滑行几率,但如果控制策略不合理,依然会出现紧急制动,甚至在区间内发生紧急制动。
车载信号系统的测速方法通常采用双速度传感器或速度传感器加雷达的方式。由于列车运行距离通过测速来计算,故当列车发生严重滑行时速度传感器测速误差会比较大,计算距离和实际运行的距离误差会比较大。这样,信号系统地面应答器在核对列车位置时会无法确认列车位置,从而触发紧急制动。若采用速度传感器加雷达的方式,则由于雷达测速方式不受滑行影响,测速比较准确,不容易产生较大的误差。故建议信号系统采用速度传感器加雷达的测速方式。
2.10 紧急制动旁路在ATP监控下的使用
根据多年的运营经验,有些车辆故障会引发紧急制动,但大多数情况下牵引系统和制动系统并无故障,是可用的,且通过旁路紧急制动回路可以让列车依靠自身动力回库,避免救援。
从运营的角度来说,在ATP 功能正常的情况下,紧急制动旁路应在ATP 监控下使用(在制动旁路电路增加ATC 紧急制动触点)。这样便于司机监控速度,使行车更安全。
信号系统供应商认为紧急制动旁路时应切除信号系统;因为车辆故障状态下无法判断制动性能是否正常,也无法判断能否保障列车所需的安全制动距离。为此,用户和供应商要充分沟通、互相理解。
在南京地铁项目中,首先,经过协商,由用户向信号系统供应商提供紧急制动旁路装置使用规定;然后,由信号系统供应商进行安全评估;最后,供应商同意了用户的需求。而南京地铁车辆设计方在设计控制电路时就将此功能加入了控制电路。
[1] 郝海龙,何庆复,柳拥军.无人驾驶地铁轻轨列车中的轮轨粘着问题[J].铁道机车车辆,2005,25(3):32-35.
[2] CENELEC Internal Regulations.Railway applications-Braking-Mass transit brake system Part 1:Performance requirements:EN 13452-1 [S].Brussels:CEN,2003.
Analysis of Key Issues on Interfaces between Subway Vehicle and Signaling System
HE Yuqin, ZHANG Qian
The main problems related to interfaces between vehicle and signaling system during the subway construction in Nanjing City in the past 10 years are summarized,key points in the design phase of subway interfaces are emphasized,solutions and suggestions are proposed.
urban rail transit; vehicle; signaling; interface
U231.7
10.16037/j.1007-869x.2016.12.027
2016-07-25)
