主副构架铰接的主动径向转向架曲线通过性能研究*
2017-01-04罗湘萍田师峤
罗湘萍 田师峤
(同济大学铁道与城市轨道交通研究院,201804,上海∥第一作者,副教授)
主副构架铰接的主动径向转向架曲线通过性能研究*
罗湘萍 田师峤
(同济大学铁道与城市轨道交通研究院,201804,上海∥第一作者,副教授)
开发了一种主副构架弹性铰接的新型城市轨道交通车辆转向架,其轮对定位采用不对称悬挂,主构架上轮对纵向定位刚度小,副构架上轮对纵向定位刚度大。此新型转向架具有主动径向功能:转向架正向通过曲线时,作动器动作使得副构架相对主构架产生弯折角,并带动其轮对处于径向位置,提高了曲线通过性能;转向架反向通过曲线时,利用主构架轮对自身的导向特性实现曲线通过。此种转向架的曲线通过性能大大提高,并同时兼顾了其直线运行稳定性。
城市轨道交通车辆; 主副构架; 柔性铰接装置; 不对称悬挂; 主动径向功能; 曲线通过性能
First-author′s address Institute of Railway and Urban Mass Transit,Tongji University,201804,Shanghai,China
城市轨道交通广泛运用的轨道车辆最小通过曲线半径为300 m,为兼顾车辆运行速度与车辆运营安全,仅优化悬挂参数已无法进一步提高转向架的曲线通过性能,也就无法降低最小通过曲线的半径值。因此,传统轨道交通车辆已不能适应城市轨道交通对运营效率及线路布置灵活性的要求。两者的矛盾日益尖锐。此矛盾的核心在于被动定位的转向架悬挂必须兼顾直线稳定性与曲线通过性能。
若要彻底解决此矛盾,使得转向架在具有较高蛇形临界速度的同时,亦具有较好的曲线通过能力,从而既能降低轮轨磨耗及转向架过曲线时的“啸叫”噪声,又能提高车辆运行速度,则需研究曲线通过时轮对径向辅助调整的方法,以实现转向架的径向功能。其中,主动径向技术是实现转向架径向功能的最有效方式。
1 主副构架铰接的新型转向架设计
1种主副构架铰接的新型转向架设计方案模型如图1所示。转向架与车体间的垂向载荷通过空气弹簧、柔性铰接装置传递;纵向及横向载荷通过中心牵引装置及横向止挡传递。可见,此新型转向架具有与传统转向架相同的二系承载形式。
主副构架通过柔性铰接装置一及二连接成一体,完成转向架承载及传递载荷的功能。主副构架间横向布置作动器以实现主动径向功能,同时也为主副构架间提供大横向刚度。
转向架的若干主要参数决定了其动力学性能,对车辆运行品质有着决定性影响。此新型转向架主要技术参数如表1所示 。
2 转向架通过曲线时几何行为分析
此转向架通过曲线作动器动作时,主副构架的几何动作行为如图2所示。
由图2可知,当转向架副构架在前时,作动器动作推动副构架,使得副构架相对主构架产生回转角。因柔性铰接装置一横向刚度较大,而柔性铰接装置二横向刚度较小,因此副构架的回转中心靠近柔性铰接装置一。同时,副构架轮对的纵向定位刚度很大,可忽略其与副构架间的位移,从而可认为轮对随着副构架回转,处于径向位置。当副构架轮对处于理论径向位置时,作动器的动作位移:
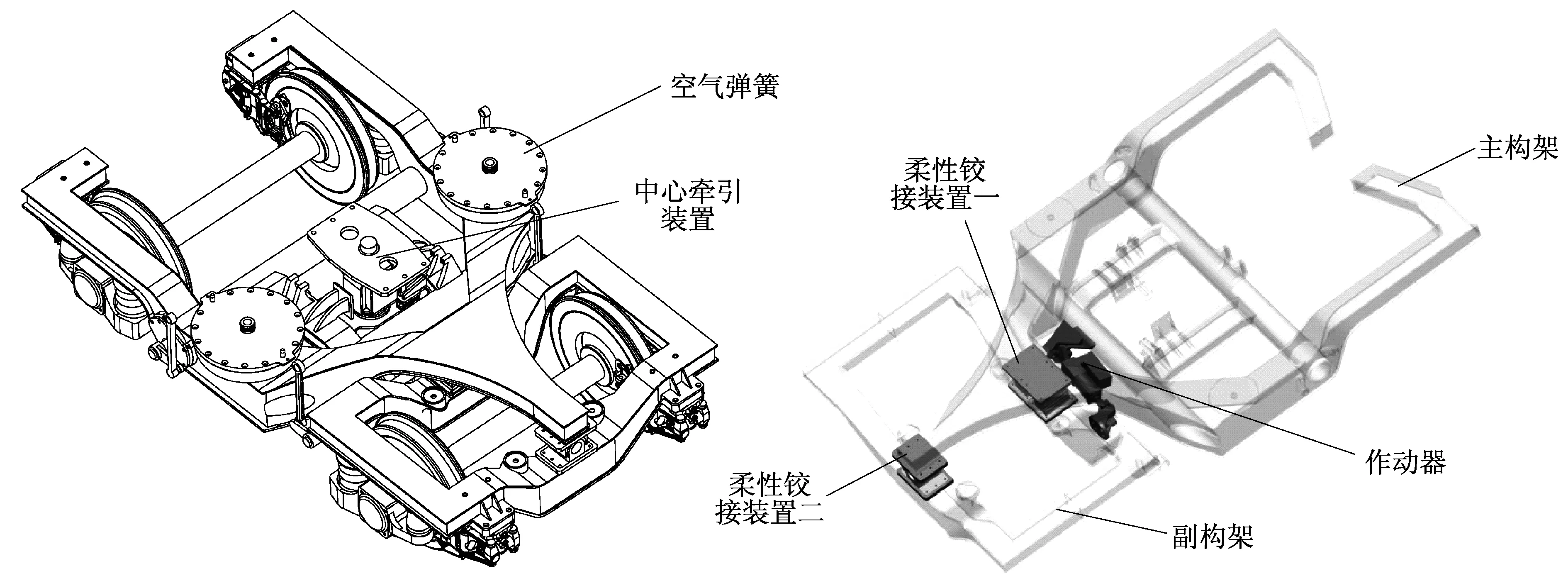
图1 主副构架铰接的新型转向架设计方案模型

设计参数数值转向架轴距/mm2500主构架轴箱纵向定位刚度/(MN/m)4轴重/t16副构架轴箱纵向定位刚度/(MN/m)20
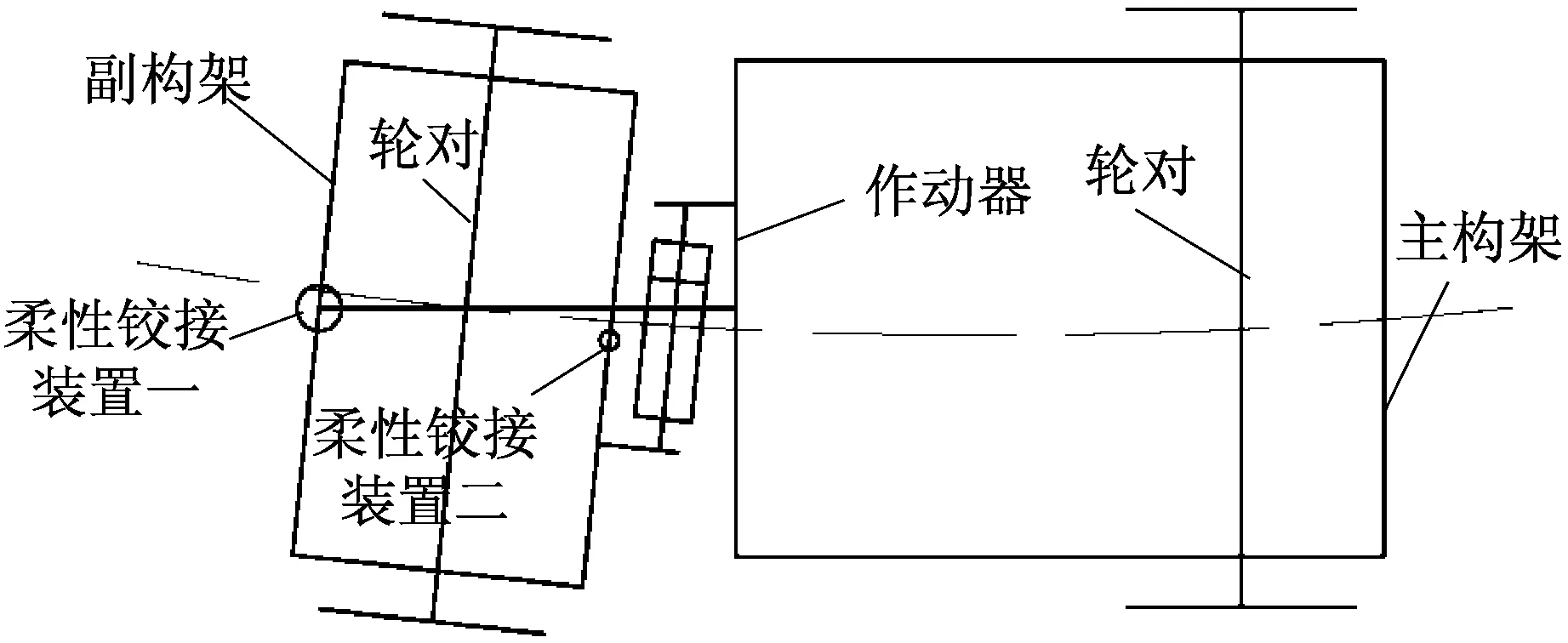
图2 转向架通过曲线时主副构架动作行为
(1)
式中:
d——作动器动作位移;
a——转向架轴距;
R——曲线半径;
Lx——作动器轴线与柔性铰接装置一的纵向间距。
当转向架主构架在前时,主构架因被柔性铰接装置及轴箱约束住了摇头行为,从而无法主动弯折,故只能利用主构架轮对自身的导向特性来实现曲线通过。
有研究表明,当前导向轮对的纵向刚度小,跟从轮对的刚度大时,转向架的曲线通过性能令人满意,且与前后轮对定位刚度都小的转向架相当,同时转向架稳定性高于前后轮对定位刚度都小的转向架[1]。因此,在保证转向架稳定性的前提下改善曲线通过性能是可行的[2]。
当转向架在直线上运行时,作动器在主副构架间提供了较大的横向刚度,与柔性铰接装置一同时约束住了副构架的摇头行为,使转向架具有相当的稳定性。
为了验证此设计方案的可行性,利用SIMPACK建立动力学模型,并对其动力学性能进行分析。
3 仿真模型建立
采用SIMPACK建立整车模型。1节车辆具有1个车体、2个新型转向架及2个作动器。其中,作动器采用只有1个轴向自由度的驱动铰接装置。其余悬挂元件与传统轨道车辆相同。
为实现主动径向功能,建立SIMULINK-SIMPACK联合仿真模型,先由SIMULINK生成作动器的动作位移,再利用SIMAT模块将动作位移输入至SIMPACK中,进而完成联合仿真。此仿真模型的流程框图如图3所示。
线路参数包括缓和曲线长度、圆曲线长度及圆曲线半径等。本次仿真模型中,缓和曲线长度为60 m,圆曲线长度为100 m,圆曲线半径为300 m,外轨超高120 mm,且车辆通过曲线时用足60 mm的欠超高。分析重点是此新型转向架的曲线通过性能及其稳定性。

图3 联合仿真流程框图
4 曲线通过性能与直线稳定性分析
4.1 车辆通过曲线时副构架在前
副构架在前时,副构架轮对为导向轮。为便于分析主动径向的效果,建立2个SIMPACK模型。两模型的区别仅在于作动器是否动作。仿真结果如图4~7所示。

图4 作动器动作位移图

图5 主副构架相对弯折角

图6 转向架各轮对横向力
由图4~7可知:
(1) 车辆通过曲线,当副构架在前时,作动器动作,副构架相对主构架的弯折角变大;前转向架作动器先动作,后转向架作动器后动作,且两者在空间上相差1个中心销距。
(2) 车辆通过曲线且当副构架在前时,作动器未动作时,轮对横向力最大值出现在缓圆点处;作动器动作后,各轮对横向力减小,尤其减小了在缓圆点处的轮对横向力。

图7 前后转向架导向轮冲角
(3) 车辆通过曲线且当副构架在前时,作动器动作,前后转向架导向轮的冲角大幅度减小,导向轮对处于径向位置。
转向架通过曲线时,各关键仿真数据记录见表2。由表2可见,车辆通过曲线,当副构架在前时,通过副构架主动弯折的动作模式来实现径向功能具有较好的径向效果,明显降低了轮对横向力及导向轮的冲角,这对降低轮轨磨耗、降低脱轨系数有积极意义。
4.2 车辆通过曲线时主构架在前
主构架在前时,主构架轮对为导向轮。因主构架无法实现主动弯折,所以只能利用主构架轮对自身的导向特性实现曲线通过。此时为提高车辆通过曲线时的性能,并兼顾车辆运行稳定性,推荐采用不对称悬挂设计[3],给主构架上轮对设置较小的纵向定位刚度。仿真结果如图8所示。

表2 转向架通过曲线时仿真数据记录表

图8 转向架各轮对横向力
由图8可知:
(1) 车辆通过曲线且当主构架在前时,若作动器不动作,则采用不对称悬挂具有优越性。此时主构架上轮对纵向定位较小,轮对横向力较低,尤其减小了在缓圆点处的横向力。
(2) 车辆通过曲线且当主构架在前时,若作动器动作,则副构架相对主构架产生弯折角,反而导致各轮对的横向力均增大,使曲线通过性能不增反降,甚至影响运行安全。
可见,车辆通过曲线且当主构架在前时,因主构架无法主动弯折,故作动器动作反而会带来不利影响。因此,只能采用不对称悬挂,通过优化主构架轮对的纵向定位刚度来改善曲线通过性能,同时兼顾转向架的运行稳定性。
4.3 车辆运行稳定性
采用不对称悬挂后,主构架轮对的纵向定位刚度较小。这在一定程度上会降低转向架的直线稳定性。因此,需要计算此时转向架的临界速度。此新型转向架在不同运行速度下,轮对横移量如图9所示。计算模型中轮对采用LMA磨耗型踏面,轨道采用R60轨。
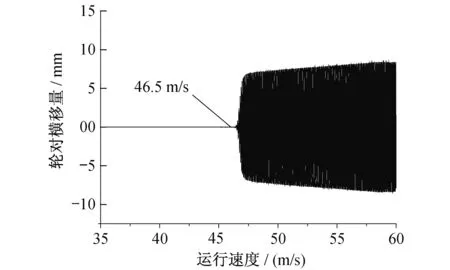
图9 转向架运行临界速度
由图9可知,此转向架的运行临界速度为46.5 m/s(约为167 km/h),满足现今轨道交通车辆80 km/h的运行速度要求。
5 结论
此新型转向架通过曲线时的各关键仿真数据记录见表3。
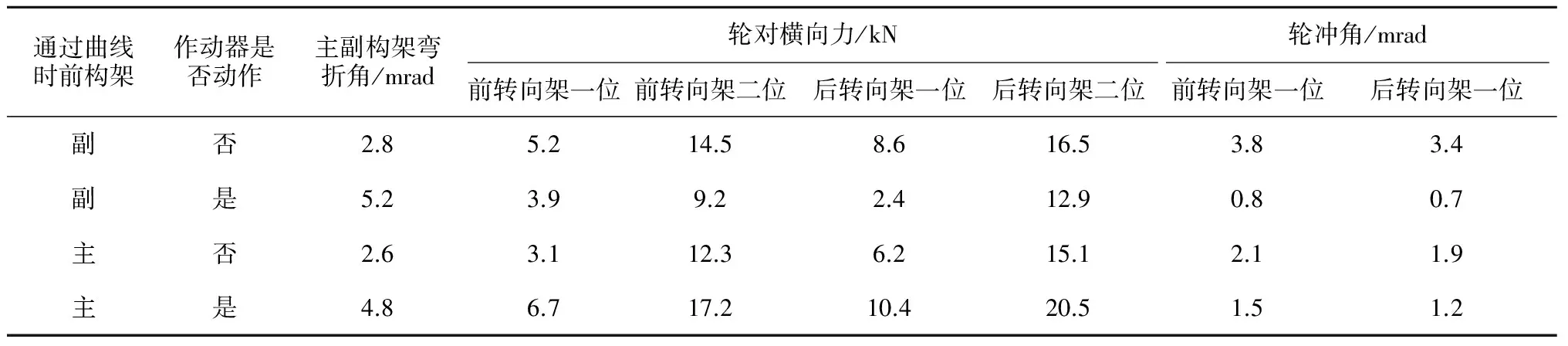
表3 新型转向架通过曲线时仿真数据记录表
结合表3及上述分析,可以得到如下结论:
(1) 针对转向架结构的不对称性,采用了不对称悬挂的设计。其中,副构架上轮对纵向定位刚度大,因此副构架在前通过曲线时,需通过副构架的主动弯折来带动轮对处于径向位置;主构架上轮对纵向定位刚度小,当转向架反向通过曲线时,可利用轮对自身的导向特性以较好的姿态通过曲线。此时作动器若动作,反而会恶化转向架的曲线通过性能,甚至影响安全。此种具有不对称悬挂设计的主动径向转向架,提高了车辆的曲线通过性能,同时也兼顾了转向架的直线稳定性,其临界速度可达167 km/h,满足城市轨道交通车辆对稳定性的要求。
(2) 为提高此新型转向架的实际运用价值,可以采用如下方案:车辆通过曲线时,若副构架在前,则主动径向调整机构动作;若主构架在前,则主动径向调整机构不动作。
[1] 沈钢,黎冠中.非对称半主动控制径向转向架的仿真研究及方案设计[J].铁道车辆,2002,40(3):13-16.
[2] 陈琦.采用非对称转向架的城轨车辆动力学研究[D].成都:西南交通大学,2008.
[3] 万芳.非对称悬挂转向架曲线通过性能[J].国外铁道车辆,1998,35(2):15-19.
Curving Performance of Active Radial Bogie with Main frame and Sub-frame
LUO Xiangping, TIAN Shiqiao
A new bogie of rail vehicle equipped with two frames coupled by a pair of flexible joints is designed, which adopts unsymmetrical primary suspensions,the longitudinal stiffness of wheel is set to be soft on the main frame,while the hard longitudinal stiffness is on the sub-frame.Active radial function is implemented on this new bogie, the angle around Z-axis between the main frame and sub-frame becomes larger with the performance of actuator when bogie moves forward through a curve, the action will lead the wheel on sub-frame to radial position,enhancing the curving performance.The steering characteristics of wheel itself on main frame is fully used when bogie moves backward through a curve.In conclusion,the curving performance of this new bogie is increased significantly and the stability is balanced as well.
rail transit vehicle; main frame and sub-frame; flexible joint; unsymmetrical suspension; active radial function; curving performance
* 国家科技支撑计划项目(2015BAG12B01-21)
U 270.331; U 260.11+3
10.16037/j.1007-869x.2016.12.001
2016-06-22)
