基于正交变换与置信域的量测方差估计与权重设置算法
2016-12-27卢志刚田莎莎
卢志刚 田莎莎,2 邵 奇,3 吴 杰
(1.燕山大学电力电子节能及传动控制河北省重点实验室 秦皇岛 066004 2.国网沧州供电公司 沧州 061000 3.国网天津市电力公司物资公司 天津 300304)
基于正交变换与置信域的量测方差估计与权重设置算法
卢志刚1田莎莎1,2邵 奇1,3吴 杰1
(1.燕山大学电力电子节能及传动控制河北省重点实验室 秦皇岛 066004 2.国网沧州供电公司 沧州 061000 3.国网天津市电力公司物资公司 天津 300304)
在状态估计实际应用中,量测方差获取和权重设置存在一定的困难。伴随状态估计运算量越来越繁重,现有量测方差估计算法的收敛性无法得到保证。为此提出了一种基于正交变换与置信域的量测方差估计和权重设置算法。利用正交变换降低迭代系数矩阵条件数,提高量测方差估计的数值稳定性;根据正交变换的化简结果,结合拉格朗日乘子法,建立新的量测方差估计模型;对于迭代过程的中间数据,采用置信域作为目标函数的约束,确保每次估计结果落在置信区间内;最后,通过IEEE 14/30/118标准系统算例证明了该算法的有效性。
状态估计 正交变换 置信域 量测方差 权重 收敛性
0 引言
状态估计是能量管理系统的重要组成部分并得到广泛应用。但是在实际中仍然存在值得研究的问题,例如状态估计的合格率与精度[1]。
电力系统利用最小二乘法对冗余量测量拟合得到状态量的最优估计值。由监测设备采集并经由通信系统到达状态估计器的量测量存在不同程度的误差。对于量测量精度不相等的问题,可以通过加权来提高估计的准确性[2-5]。根据最小二乘原理,权重取量测方差的倒数。权重与量测方差不仅是保证估计精度的重要前提,还是不良数据辨识与抗差状态估计[6]的基础参数,应重视并合理设置这两个参数。
文献[7]探讨了确定权重的原则,指出数值稳定性与估计准确性需要同时兼顾。具体的设置方法目前主要有组合参数法[4,8]、量测分类设置法[9]和样本估计法[10-12]。第一种方法应用较早,主要利用仪表精度、转换误差等设备参数组合设置权重。该方法没有考虑通信噪声的影响,也没有考虑装置逐年老化产生的误差偏移。即便如此,作为远端的状态估计维护人员也很难获取在现场运行的装置精度参数。第二种方法将量测分为注入、支路等类型,综合层次分析等模糊评价方法确定权重。第三种方法通过量测残差与误差的数学模型对样本数据计算得到量测方差和权重。文献[10,11]根据残差灵敏度矩阵搭建残差与误差模型。但残差灵敏度矩阵不满秩限制了该法的应用。在此基础上,文献[12]简化了残差与误差的数学模型,建立了自适应权重更新算法,即迭代重加权量测方差估计算法(Iterative Re-weighted Measurement Variance Estimation,IRMVE)。状态估计求解运用牛顿法及正则方程组(Normal Equations)法。牛顿法容易发生数值病态问题,现场运行有时会发生不收敛现象[13]。IRMVE法迭代计算量大,不收敛现象较为严重,限制了应用范围。
针对状态估计数值病态问题,等式约束法[14,15]、正交变换法[16-19]、置信域法[20-22]等给出了解决方案。等式约束法针对电力系统零注入节点较多的情况,将虚拟量测处理成等式约束,主要克服了虚拟量测权重系数设置过大导致的数值问题。正交变换法直接降低迭代过程中系数矩阵的条件数,显著提高数值稳定性。而置信域法将状态空间处理成不等式约束,在置信域内,可使二次模型更好地适应非线性目标函数,是提高状态估计收敛性的重要手段。
本文首先研究现有量测方差算法,针对收敛性以及数学模型不满秩等问题做出了改进。在采用正交变换提高迭代数值稳定性的同时,推导出新的误差方差计算模型,并利用状态置信域保障单次迭代计算结果的可信性。最后通过IEEE 14/30/118节点标准系统算例进行验证。
1 迭代重加权算法
该算法主要由以下3个步骤构成:
1)确定量测样本总数,量测样本通过相同时段不同时刻的量测数据构成。对每个时刻样本数据进行状态估计获得单个时刻样本的量测残差,量测模型为
z=h(x)+v
(1)
式中,z、v分别为m阶的量测向量与量测误差向量;状态向量x含有n=2N-1个元素;N为系统的节点数。利用加权最小二乘原理,目标函数为
J(Δx)=[Δz-HΔx]TW[Δz-HΔx]
(2)
建立正则方程组求解
Δx=(HTWH)-1HTWΔz
(3)
当全部样本都经过状态估计的计算获得了量测残差,则称之为实现了一次“全计算”。
2)计算量测方差。运用加权残差与加权误差方程
rw=Swvw
(4)
Sw=I-W1/2H(HTWH)-1HTW1/2
(5)
式中,rw、 vw、 Sw分别为m维加权残差向量、m维加权误差向量和m阶的加权残差灵敏度矩阵。式(4)建立起残差与误差的关系。然而,加权残差灵敏度矩阵Sw的秩为m-n, 不能够用求逆的方法求解式(4)。这给求量测方差带来一定的困难。对此有简化的误差协方差的模型[10]如式(6)所示。
Cov(r)=SRvST=SRv
(6)
式中,Rv=E[vvT]; Cov(r)的对角元素Rii与Rv的对角元素Rvii可通过S对角元Sii建立如下关系:
Rii=SiiRvii
(7)
残差灵敏度矩阵对角元Sii在理论上是非负数,但是在数值计算过程中,该对角元如果越来越小,会发生“变号”形成负值,导致计算结果迅速变坏。
3)根据新的权系数矩阵,判断是否收敛。若收敛,则停止输出最终的量测方差和权系数。若不收敛,则回到步骤1),重复上述过程,直到收敛为止。这就是迭代重加权量测方差估计算法(IRMVE)。

IRMVE运算并不稳定,不收敛情况会在前几次全计算中出现。直接原因在于权系数的差异会随全计算次数增多而扩大,同时残差灵敏度对角元发生“变号”。根本原因在于正则方程组法本身容易发生数值病态,这限制了IRMVE向更大规模节点系统应用。
2 基于正交变换与置信域的量测方差估计与权重设置方法
2.1 目标函数的处理
针对正则方程组法给状态估计带来的数值问题,正交变换法能够使迭代过程中的系数矩阵的条件数降低,从根本上提高数值稳定性。简要分析正交变换原理,其形式为
(8)
Givens法是一种重要的正交变换方法。Givens法通过挖掘雅克比矩阵的稀疏条件,可以显著提高正交变换的速度。IEEE 118节点系统单次状态估计能够控制到几十ms范围内[16]。
IRMVE需要数以千次甚至万次的迭代运算,中间结果不可能一一输出用以辨识其准确性。对此,可以给出状态的某个值得信赖的区域作为约束,从而建立全局收敛的状态估计模型,保证计算结果能够分布在可信区域内。并且,可以将正交变换与置信域相结合。
首先给出某一状态初值,在迭代过程中,如果状态增量满足二次准则
(9)
式中,q(·)为二次准则目标函数;J(·)为原目标函数;δ为状态增量的步长;ρ为置信域半径。通过将步长因子参数化,使式(9)变为等式约束问题。
(10)
忽略式(10)的二次项,并应用拉格朗日乘子法,得到[21]
(11)
考虑正则方程组式(3),有
(HTR-1H+μkI)δ(μk)=HTR-1[z-h(xk)]
(12)
将式(12)进一步分解为
(13)
(14)

2.2 量测方差计算模型
本文引入正交变换,一方面是为了提高数值稳定性;另一方面,借正交变换对残差灵敏度矩阵进行化简,给出更明确的量测方差计算模型。
将式(11)代入式(4),推导过程如下:
得到
(15)
式中,On为n阶全零方阵;Im-n为m-n阶单位阵。用QT左乘式(15)两边得
(16)

(17)
整理得
(18)
(19)

(20)
基础量测误差可以看做是一组确定的值。根据假设:量测已经通过剔除显著粗差,粗差水平并不高。从而建立如下求解量测方差模型。
(21)
根据拉格朗日乘子法得到目标函数
(22)
式中,λ为m-n阶系数向量。
可得到极值条件
(23)
每个样本按照正交变换与置信域法进行状态估计,利用上述模型计算误差,通过多样本误差获得量测方差,进而得到各个量测的权系数,计算方法如下:
(24)
(25)
式中,i为量测量序号;K为样本总数。考虑到K个样本误差自由度为K, 所以式(24)除数为K而非K-1。 样本个数并非越多越好,当样本个数达到一定程度时,计算精度就不再提高。为提高计算效率,应该合理设置样本容量。最终得到了基于正交变换与置信域的量测方差估计算法(Orthogonal Transformation and Trust Region based Measurement Variance Estimation,OTTRMVE)。
2.3 OTTRMVE算法流程
准备工作:确定最小样本容量值K。 利用同一格式存储相应个数的电力系统运行数据与网络结构参数。
1)利用已知信息初始化方差矩阵和权系数矩阵W。 如果方差及权系数未知,则将权系数统一为1。输入其他初始化参数。
2)时刻计数器k=1, 全计算次数计数器t=1。
3)根据式(14)的正交变换与置信域法状态估计,对当前样本数据进行计算。判断状态估计是否收敛,收敛则跳转至步骤4);不收敛继续步骤3)。如果状态估计迭代次数达到上限,则结束。
4)记录k时刻的量测残差。判断时刻计数器k是否小于样本容量值。若小于,则计数器k++, 返回至步骤3);如果等于,跳转至步骤5)。
5)根据式(24)、式(25)计算全计算次数t水平下的权系数。如果t=1, 则t++, 并返回至步骤3);如果t>1, 判断权系数是否收敛。如果收敛则结束,并输出权系数与误差方差向量;如果不收敛,则跳转至步骤6)。
6)判断t是否到达上限。如果小于上限,则t++, 返回步骤3);如果达到上限,则结束。流程如图1所示。

图1 OTTRMVE算法流程Fig.1 The flowchart of the OTTRMVE algorithm
3 算例仿真
3.1 仿真环境与算例设置
仿真软件为Java(Eclipse),虚拟机(JVM)最大内存512M。计算机为双核2.0GHz便携式计算机。本文采用IEEE 14/30/118节点三个标准系统算例,各个系统基本的信息见表1。
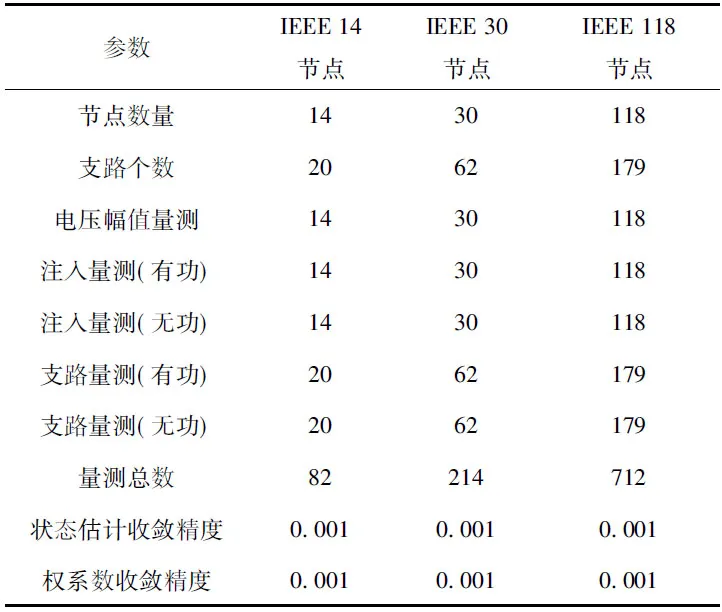
表1 测试系统与量测配置信息Tab.1 Test systems and measurement configurations
采用“全量测”的配置方式,即已知所有电压幅值、注入有功无功、支路一端的有功无功。这主要是避免对杠杆量测与关键量测问题的讨论。样本量测数据模拟负荷变化缓慢情况下时间上足够接近的系统运行数据。量测编号为IEEE默认编号。
3.2 IEEE 14节点系统
量测标准差设置如下:电压幅值:0.004,除母线3、8(0.080)与母线5、9(0.001);注入功率:0.01,除母线4(0.05)与母线7、10(0.001);支路功率:0.008,除支路3、5、9(0.1)与支路10(0.001)。OTTRMVE与IRMVE法收敛对比如图2、图3所示。
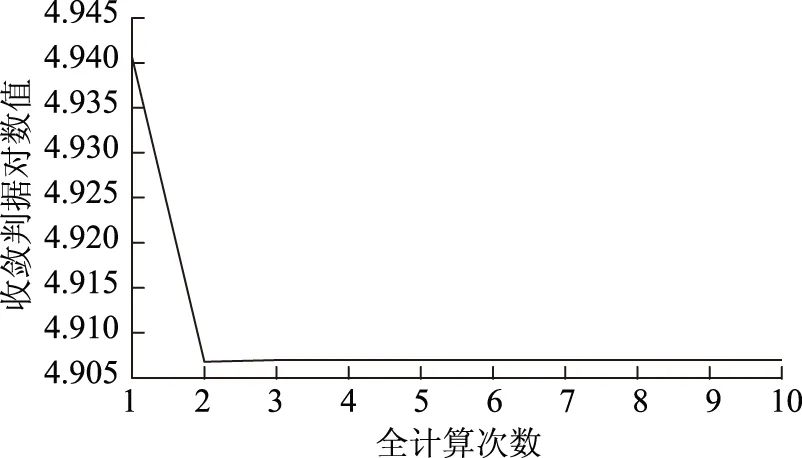
图2 IEEE 14节点OTTRMVE收敛判据变化Fig.2 The convergence criterion variation of OTTRMVE for IEEE 14-bus system
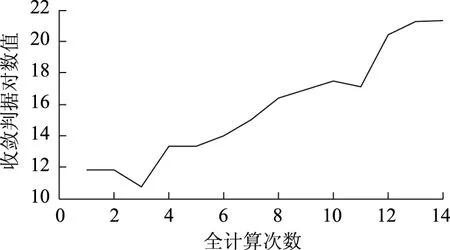
图3 IEEE 14节点IRMVE收敛判据变化Fig.3 The convergence criterion variation of IRMVE for IEEE 14-bus system
对于相同的收敛精度,当全计算次数达到第3次时,OTTRMVE法即收敛,收敛判据不再发生变化,而IRMVE法则呈现出发散趋势。值得指出的是,这样的收敛精度是较为宽松的,特别是对电压幅值标幺值而言。
IEEE 14节点OTTRMVE法数值估计精度如图4所示。量测误差标准差真值设置的部分突变点,可以反映OTTRMVE法对于突变值的计算精度。从图4可以看出,OTTRMVE法能够较为准确地反映误差方差的突变。OTTRMVE法保证每一步状态估计的结果收敛到状态置信域当中。在突变幅度较大的情况下仍能较好地反映误差方差的变化。
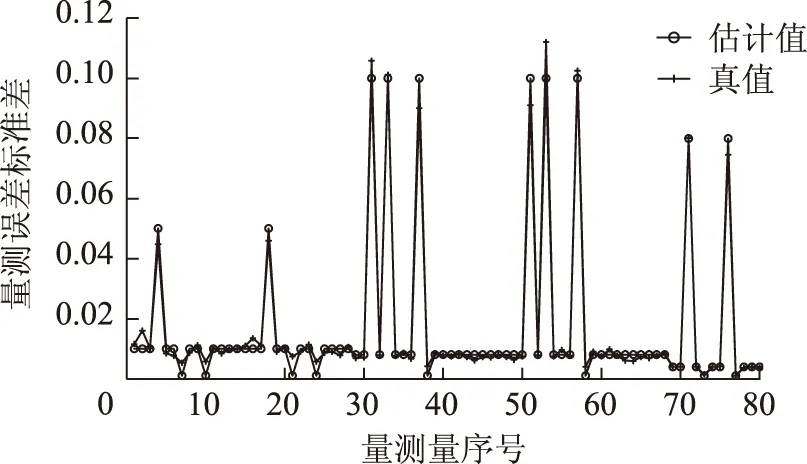
图4 IEEE 14节点OTTRMVE法估计精度Fig.4 The estimation accuracy of OTTRMVE for IEEE 14 -bus system
由表2可见,随着样本数量的增加,OTTRMVE法估计值的相对误差方差呈现出先减小而后增大的趋势。根据前文分析,并非样本数量越多估计精度越高。对于一定的估计精度要求,样本数量存在一个最小值。由表2可知,该值为100左右。合理规划样本个数,可以有效缩短估计时间,提高效率。

表2 IEEE 14节点系统OTTRMVE试验结果Tab.2 Test results of OTTRMVE for IEEE 14-bus system
3.3 IEEE 30节点系统
IEEE 30节点系统量测规模明显增大,系数矩阵规模达到214维。用以考察中等维度水平下OTTRMVE法的计算精度,如图5所示。

图5 IEEE 30节点OTTRMVE法估计精度Fig.5 The estimation accuracy of OTTRMVE for IEEE 30-bus system
量测标准差真值设置按照注入有功、注入无功、支路有功、支路无功、电压幅值排序。每一类量测的标准差真值设置彼此不同。事实上,量测序号可以任意排序,这对估计结果没有影响。从图5可以看出,绝大部分误差标准差估计值与真值相吻合,结果精度令人满意。
3.4 IEEE 118节点系统
IEEE 118节点系统雅克比矩阵阶数为712,状态估计迭代计算量显著增加,用以考察较高维度水平下IRMVE与OTTRMVE法的收敛性能。IRMVE和OTTRMVE全计算结果见表3。

表3 IEEE 118节点系统方差估计结果对比Tab.3 The comparison of variance estimate results for IEEE 118-bus system
全计算第3次OTTRMVE法收敛,而IRMVE法弹出错误并结束。从表3看出,截止到前3次全计算,两种方法耗时大致相同,OTTRMVE稍快一些。这是因为系统节点数目越多,雅克比矩阵稀疏程度越高。与小系统相比,大系统更能发挥Givens正交变换法的效率优势。
尽管最大全计算次数是10次,但是IRMVE法第3次权系数就已不收敛,而OTTRMVE法在第3次收敛。
OTTRMVE法的最大最小方差在合理区间,其最大最小方差之比要远小于IRMVE法。IRMVE的“最小方差”是一个负值,这是残差灵敏度矩阵对角元出现负值造成的,与表3所示负值相对应的残差灵敏度矩阵对角元为-3.29×10-7。负值是IRMVE数值不稳定的一个显著现象。与之形成对比的是,OTTRMVE法始终未出现负值,显示良好的稳定性。
4 结论
本文针对现有方差估计算法在收敛性上存在的问题,提出了基于正交变换与置信域的量测方差估计与权重设置算法。该方法采用正交变换法提高单步迭代的数值稳定性。通过化简残差灵敏度矩阵,得到一种新的量测误差计算模型。同时,将置信域作为目标函数的约束条件可确保计算结果在合理区间。仿真结果证明了该算法对于大规模量测系统仍然具有较快的处理速度,可以为状态估计初始化权重以及确定量测方差提供一种解决思路。下一步将对杠杆量测与关键量测对算法的影响进行研究。
[1] 顾锦汶.对有关标准中关于状态估计的一些不同意见[J].电力系统自动化,2014,38(2):134-135. Gu Jinwen.Disagreements discussion on state estimation in related standards[J].Automation of Electric Power Systems,2014,38(2):134-135.
[2] Schweppe F C,Wildes J.Power system static-state estimation,part I:exact model[J].IEEE Transactions on Power Apparatus and Systems,1970,89(1):120-125.
[3] Robert E L,William F T.State estimation in power systems,part I:theory and feasibility[J].IEEE Transactions on Power Apparatus and Systems,1970,89(3):345-352.
[4] 于尔铿.电力系统状态估计[M].北京:水利电力出版社,1985:54-60.
[5] Abur A,Expósito A G.Power system state estimation,theory and implementation[M].New York:Marcel Dekker,2004:20-58.
[6] 李静,罗雅迪,赵昆,等.考虑大规模风电接入的快速抗差状态估计研究[J].电力系统保护与控制.2014,42(22):113-118. Li Jing,Luo Yadi,Zhao Kun,et al.Research of fast and robust state estimation considering large-scale wind power intergration[J].Power System Protection and Control,2014,42(22):113-118.
[7] 李碧君,薛禹胜,顾锦汶,等.状态估计中选取量测权值的新原则[J].电力系统自动化,2000,24(8):10-14. Li Bijun,Xue Yusheng,Gu Jinwen,et al.A new criterion of determining measurement weights in power system state estimation[J].Automation of Electric Power Systems,2000,24(8):10-14.
[8] Vanslyck L S,Allemong J J.Operating experience with the AEP state estimator[J].IEEE Transactions on Power Systems,1988,3(2):521-526.
[9] 黄知超,谢霞,王斌.结合模糊综合评判与决策的电力系统状态估计[J].电力系统保护与控制,2015,43(7):65-69. Huang Zhichao,Xie Xia,Wang Bin.Power system state estimation combined with fuzzy comprehensive evaluation and decision-making[J].Power System Protection and Control,2015,43(7):65-69.
[10]刘广一,于尔铿,夏祖治.量测系统误差方差的估计与修正[J].中国电机工程学报,1990,10(6):31-39. Liu Guangyi,Yu Erkeng,Xia Zuzhi.Estimation and update of measurement system error variance[J].Proceedings of the CSEE,1990,10(6):31-39.
[11]Liu Guangyi,Yu Erkeng,Song Y H.Noval algorithms to estimate and adaptively update measurement error variance using power system state estimation results[J].Electric Power Systems Research,1998,47:57-64.
[12]Shan Zhong,Ali A.Auto tuning of measurement weights in WLS state estimation[J].IEEE Transactions on Power System,2004,19(4):2006-2013.
[13]郑伟业,吴文传,张伯明,等.基于内点法的交直流混联系统抗差状态估计[J].电力系统保护与控制,2014,42(21):1-7. Zheng Weiye,Wu Wenchuan,Zhang Boming,et al.Robust state estimatior for AC/DC hybrid power system based on an interior point method[J].Power System Protection and Control,2014,42(21):1-7.
[14]郭烨,张伯明,吴文传,等.直角坐标下含零注入约束的电力系统状态估计修正牛顿法[J].中国电机工程学报,2012,32(19):96-100. Guo Ye,Zhang Boming,Wu Wenchuan,et al.Power system state estimation solution with zero injection constraints using modified Newton method[J].Proceedings of the CSEE,2012,32(19):96-100.
[15]郭烨,吴文传,张伯明,等.极坐标下含零注入约束的电力系统状态估计的修正牛顿法与快速解耦估计[J].中国电机工程学报,2012,32(22):113-117. Guo Ye,Wu Wenchuan,Zhang Boming,et al.Power system state estimation solution with zero injection constraints using modified Newton method and fast decoupled method in polar coordinate[J].Proceedings of the CSEE,2012,32(22):113-117.
[16]Pandian A,Parthasarathy K,Soman S A.Towards faster givens rotations based power system state estimator[J].IEEE Transactions on Power Systems,1999,14(3):837-843.
[17]Pires R C,Costa A S,Mili L.Iteratively reweighted least-squares state estimation trough givens rotations[J].IEEE Transactions on Power Systems,1999,14(4):1499-1506.
[18]杜正春,牛振勇,方万良.基于分块QR分解的一种状态估计算法[J].中国电机工程学报,2003,23(8):51-55. Du Zhengchun,Niu Zhenyong,Fang Wanliang.A block QR based power system state estimation algorithm[J].Proceedings of the CSEE,2003,23(8):51-55.
[19]郭瑞鹏,邵学俭,韩祯祥.基于分块吉文斯旋转的电力系统状态估计[J].中国电机工程学报,2006,26(12):26-31. Guo Ruipeng,Shao Xuejian,Han Zhenxiang.A blocked Givens rotations based algorithm for power system state estimation[J].Proceedings of the CSEE,2006,26(12):26-31.
[20]Costa A S,Salgado R,Haas P.Globally convergent state estimation based on Givens rotations[J].IEEE Transactions on Power Systems,2014,29(5):2381-2390.
[21]Pajic S,Clements K A.Power system state estimation via globally convergent methods[J].IEEE Transactions on Power Systems,2005,20(4):1683-1689.
[22]Sousa A A,Torres G L,Caizares C A.Robust optimal power flow solution using trust region and interior-point methods[J].IEEE Transactions on Power Systems,2011,26(2):487-499.
Measurement Variance Estimation and Weights Configuration Algorithm Based on Orthogonal Transformation and Trust Region
Lu Zhigang1Tian Shasha1,2Shao Qi1,3Wu Jie1
(1.Hebei Key Lab of Power Electronics for Energy Conservation and Motor Drive Yanshan University Qinhuangdao 066004 China 2.State Grid Cangzhou Electric Power Supply Company Cangzhou 061000 China 3.State Grid Tianjin Procurement Company Tianjin 300304 China)
In the practical applications of state estimation,it is difficult to obtain the measurement variances and set the weights of measurements.With the computation of state estimation getting harder,the convergence of the existing measurement variance estimation algorithm can not be guaranteed.To solve this problem,an algorithm based on orthogonal transformation and trust region to estimate measurement variance and set weight is proposed in this paper.The numerical stability of measurement variance estimation is improved by the orthogonal transformation method,which can reduce the condition number of the coefficient matrix at each iteration.According to the reduced results of orthogonal transformation,combining with Lagrange multipliers method,a new measurement variance estimation model is established.The trust region is considered as the constraint of the objective function to ensure that each estimation result data is in a confidence interval.The simulation results of the IEEE 14 bus system,IEEE 30 bus system and IEEE 118 bus system show the effectiveness of the proposed algorithm.
State estimation,orthogonal transformation,trust region,measurement variance,weight,convergence
国家自然科学基金(61374098)、教育部高等学校博士学科点专项科研基金(20131333110017)和河北省研究生创新项目(00302-6370032)资助。
2015-06-15 改稿日期2016-04-27
TM734
卢志刚 男,1963年生,教授,博士生导师,研究方向为电力系统经济运行分析与控制。
E-mail:Zhglu@ysu.edu.cn(通信作者)
田莎莎 女,1989年生,硕士研究生,研究方向为电力系统状态估计。
E-mail:tianshasha0317@163.com