基于STM32的直流无刷电机正弦波控制系统
2016-12-23张佳伟徐文成
郑 宏,张佳伟,徐文成
(江苏大学电气信息工程学院,江苏镇江212013)
基于STM32的直流无刷电机正弦波控制系统
郑 宏*,张佳伟,徐文成
(江苏大学电气信息工程学院,江苏镇江212013)
将SVPWM正弦波控制技术应用于BLDCM的驱动控制,利用STM32芯片丰富的片上资源搭建控制系统,提出了逆变电路中上下桥臂功率管MOSFET的硬件驱动方案,对转子位置状态和电流闭环PI控制进行研究,详细分析了SVPWM波的生成方法,并对该控制系统的软件实现过程进行了具体阐述。通过软件仿真和实验平台性能测试,综合验证了控制方案的稳定性和可靠性。
无刷直流电动机;正弦波驱动;空间矢量脉宽调制
无刷直流电动机BLDCM(Brushless DC Motor)既保留了有刷直流电机调速范围宽、启动转矩大、运行效率高等直流电机的特性,同时也避免了有刷直流电机的电刷和换向器的结构缺陷。随着无刷电机使用越来越普遍,其控制技术飞速发展[1],就BLDCM的电子换相控制的模式而言,主要有方波和正弦波驱动两种。本文提出的正弦波空间矢量控制模式[2]具有运行平滑、转矩波动低、噪音小等优势,此模式也成为永磁同步电机(PMSM)驱动领域的研究热门。
1 系统的总体设计方案
直流无刷电机控制系统硬件原理图如图1所示。
整个系统主要是由 STM32(MCU)、逆变电路、驱动电路、检测电路和BLDCM等组成,文中SVPWM控制系统通过霍尔位置传感器获取电机转子位置信号,再对信号进行A/D转换等处理,计算电机转速和位置进行PI调节,同时输出对应的换相逻辑PWM信号,驱动电路根据PWM指令控制逆变电路功率管得导通顺序和时间,实现对电机的调速控制。
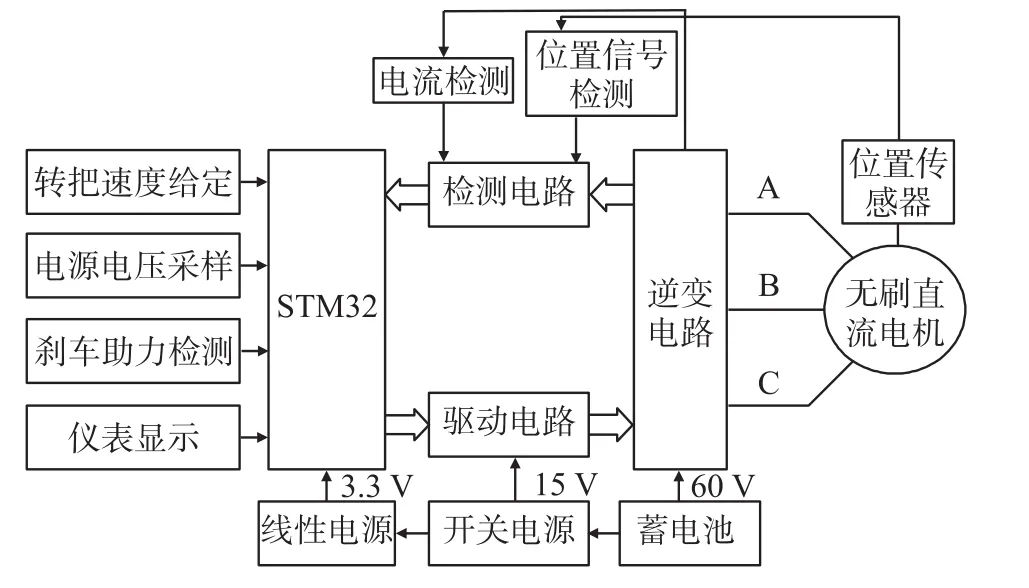
图1 总体设计方案框图
2 系统驱动电路硬件设计
逆变电路是硬件电路的主要部分,本文的MOSFET驱动电路[3]由分立元件设计构成,与专用集成驱动芯片相比,不但节约了成本,也方便维修,非常适用于电动车控制器。本文设计的分立元件驱动电路如图2所示。
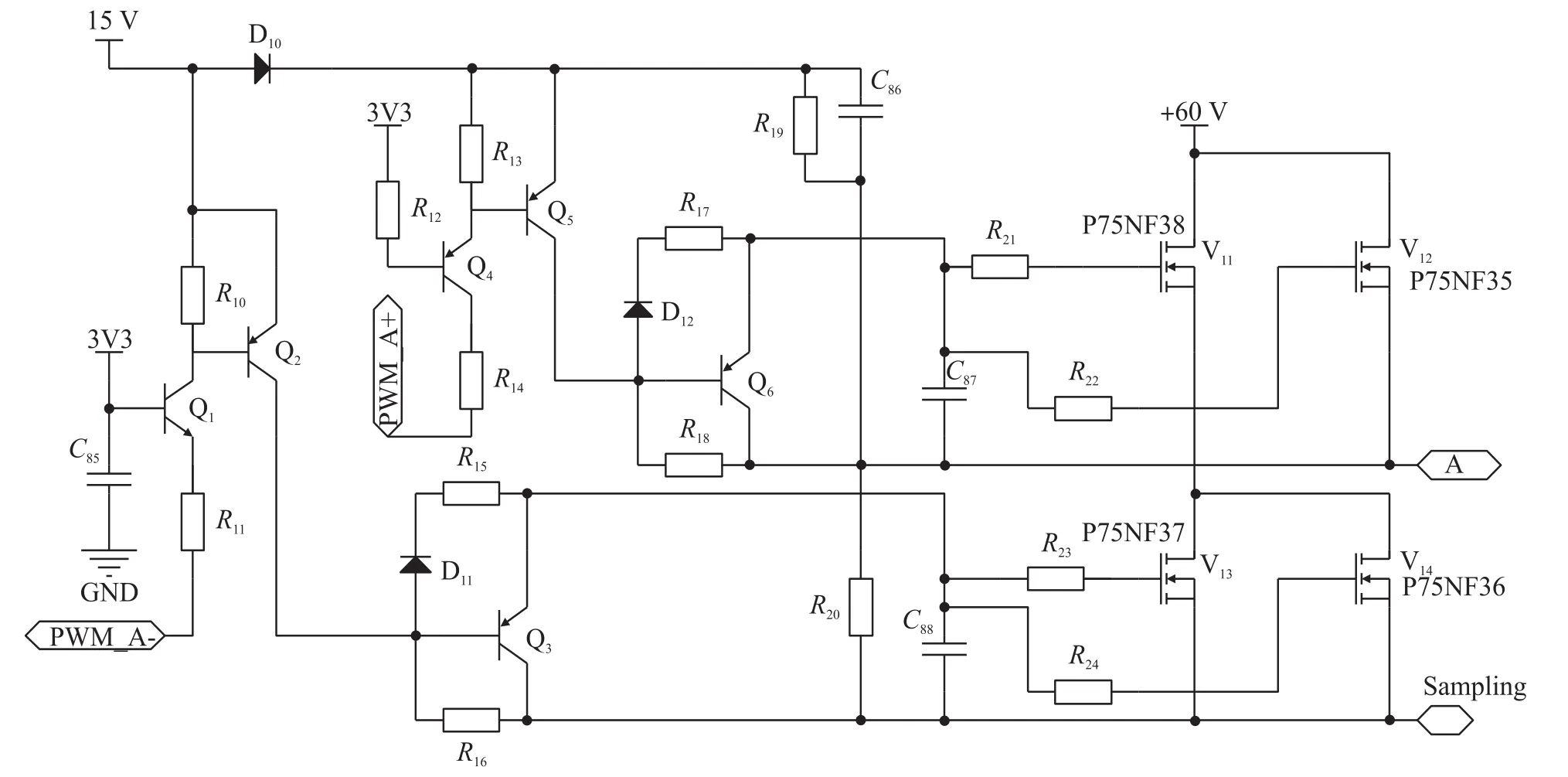
图2 主逆变电路功率管驱动电路图
MOSFET驱动电路分为上桥臂驱动和下桥臂驱动两个对称的部分,以A相电路为例,分别由PWM A+和PWM A-信号控制上下管栅极电压。驱动电路由电源电路提供的15 V供电,上桥臂的MOSFET漏极接主电源正极,源极接电机A相绕组,同时下桥臂MOSFET的漏极也接在A相绕组上,下桥臂的MOSFET源极接康铜采样电阻。上、下桥臂驱动电路不能共用15 V电源,这是由于电机运行时,相绕组平均电压会升高,而上桥臂MOSFET的源极和相绕组连接,于是源极电压就被抬高。要保证MOS⁃FET栅源极之间的电压差稳定在10 V~15 V不变,则要保证能够同时升高栅极电压。其中自举电路实现上桥臂MOSFET栅极电压升高。
3 系统软件设计及仿真研究
3.1 软件整体结构图
控制系统的软件部分[4]主要分为初始化子程序、主程序以及各个中断子程序等,控制系统软件部分整体结构如图3所示。
复位后首先对系统进行初始化,然后初始化寄存器和相关变量,初始化子程序部分主要包括一些开机自检事件如电源检测、PWM的输出、MOSFET的检测等,进入系统主程序,主程序主要处理一些实时性要求不高的任务,而实时性要求较高的任务,如转子位置信号检测、电流采样、和PWM信号产生等需要在中断子程序中执行,中断程序的任务分配是根据系统中各项指标对实时性要求高低来确定的。

图3 系统软件整体结构图
3.2 SVPWM子程序设计
根据前面章节的分析,基于SVPWM控制系统工作原理:首先将控制调速指令信号送至端口,然后将调速指令实时解算;电机转子位置信号采集后传输至端口,然后将采集所得转子位置信号进行计算处理以便获得当前转子位置角,经过调制后,根据控制算法给出的换相逻辑,使SVPWM模块产生5段式PWM波[5],控制驱动电路完成对逆变电路中MOSFET的开通关断控制,从而实现电机的调速运行。SVPWM调制程序流程如图4所示。
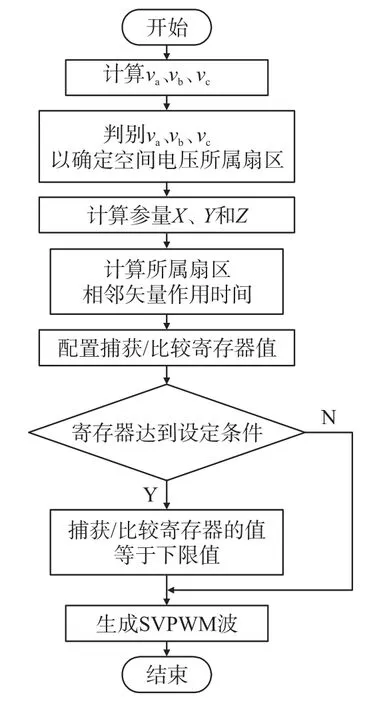
图4 SVPWM调制程序流程图
3.3 电机SVPWM控制系统仿真研究
本文在Matlab/Simulink环境中建立模型,此模型是基于id=0的永磁无刷直流电机SVPWM控制系统,并对此进行了仿真。根据上述系统理论分析,主要搭建的模块有:反电势波形为梯形波的永磁同步电机(无刷直流电机)的本体模块、电流坐标变换模块、转速环和电流环PI调节模块、电压坐标变换模块、SVPWM模块和逆变电路模块等。系统整体仿真模型如图5所示。
3.3.1 电机本体模块
电机本体仿真模块如图6所示。在整个控制系统的仿真模型中,电机模块的主要作用是计算电机的电路和机械参数,包括电磁转矩、相电流及反电动势等。仿真时可以利用仿真工具中的永磁同步电机模块,在设置参数时将磁场设置为梯形波,将电机模型按照 BLDCM的原理[6]运行。

图5 仿真模型整体框图

图6 电机本体仿真模块
3.3.2 SVPWM模型
根据电压空间矢量控制基本原理,搭建SVPWM仿真模型,其中包括的子模型有:X、Y和Z的计算、时间T1、T2的确定、扇区判别等,SVPWM模块总模型如图7所示,扇区判别模型如图8所示,时间X、Y和Z计算模型如图9所示。
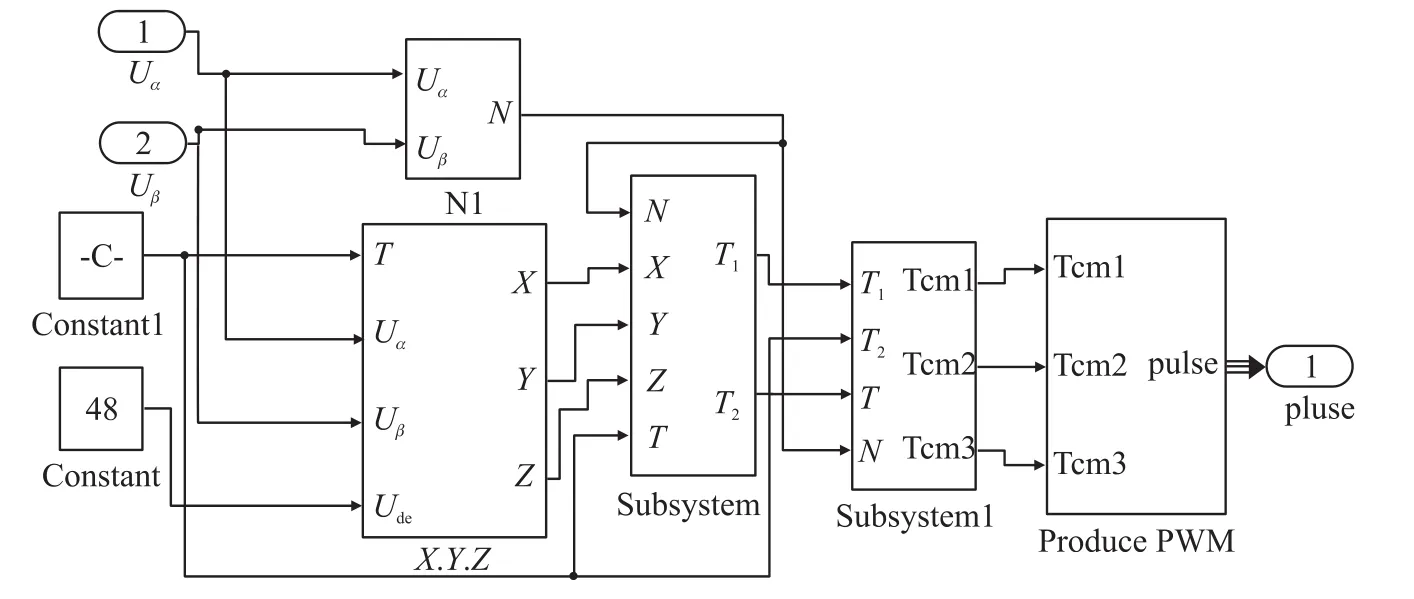
图7 SVPWM总模型
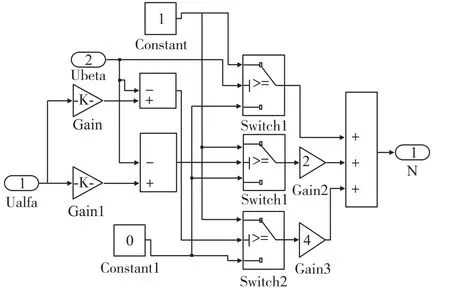
图8 扇区判别模型
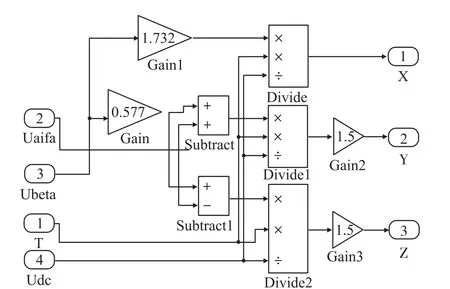
图9 时间X、Y和Z计算模型
3.3.3 仿真结果分析
通过对矢量控制系统的仿真[7],得到转矩、转速响应波形如图10所示。可以看出转矩脉动小,速度响应灵敏、运行稳定且波动小。三相相电流的波形是相位互差为120°的近似正弦波,如图11所示。通过对坐标变换分解所得电流分量id和对iq波形的监测,可知:根据id=0控制策略,励磁电流分量id在0附近变化;转矩电流分量iq呈周期性变化趋势,与数学模型中的转矩方程以及转矩波形相一致,如图12所示。
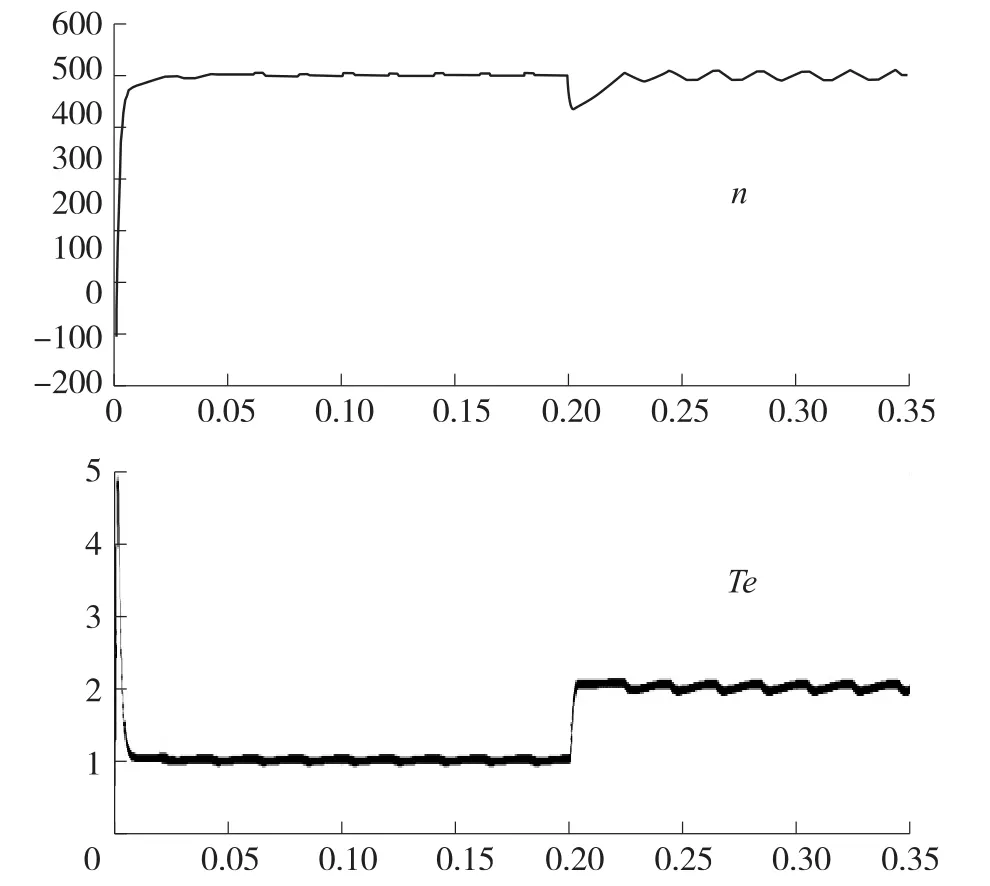
图10 SVPWM控制方式转矩和转速响应波形

图11 三相相电流波形
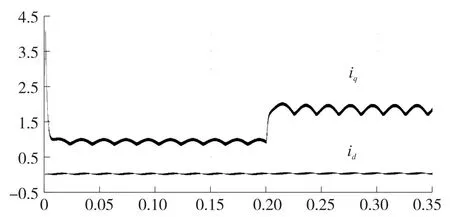
图12 id和iq波形
结合图10~图12可以看出,采用SVPWM控制永磁无刷直流电机,电机运行平稳、转矩波动更小、系统的动态性能更好。
4 系统实验结果与分析
4.1 实验平台以及设备
搭建的试验平台所用到主要设备和器件包括:本文设计的电机控制器,轮毂式永磁无刷直流电机、ST-LINK型仿真器、计算机、示波器、电机带载测试系统等,其中,图13为测试试验平台,图13所示为采用SVPWM控制技术的BLDCM控制器实物图。

图13 试验平台
4.2 实验波形分析
图14是电机稳态运行时,基于SVPWM控制下的三相电流波形,为标准正弦波,三相电流互差120°与之前理论分析以及仿真结果一致。

图14 基于SVPWM控制的三相电流波形
4.3 实验性能测试
通过测功平台[8]对本文中的永磁无刷直流电机SVPWM控制系统性能进行性能测试。其中,试验样机连接电动车用轮毂式永磁无刷直流电机在测功平台上运行一段时间的负载特性曲线如图15所示。
表1是电机负载特性曲线图中的几个最值点的参数,最值点包括:最高效率点、最大转矩点及最大输出功率点。所测参数是测功机提供的基本参数:电压、电流、转矩、输入功率、输出功率、转速和效率。
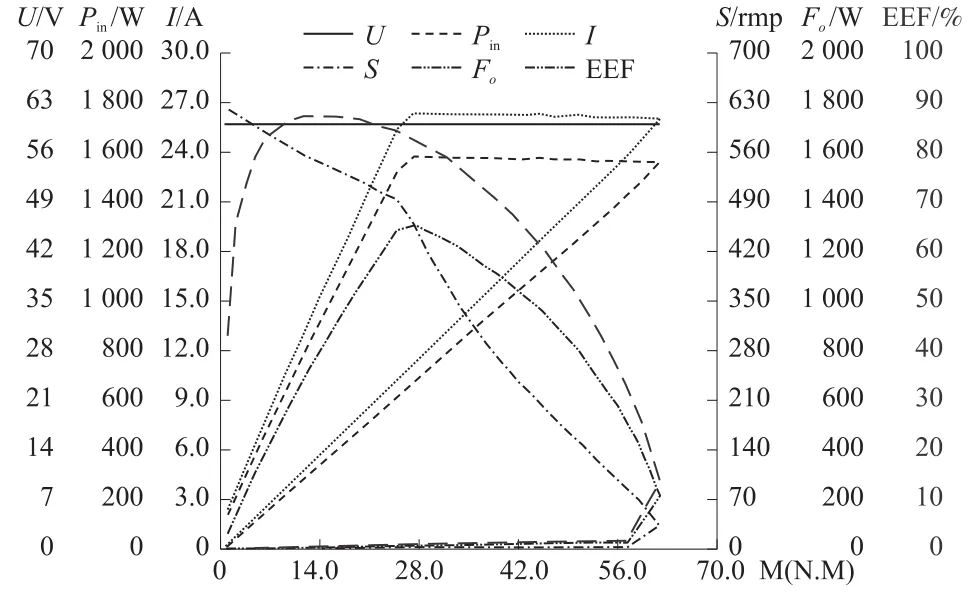
图15 电机负载特性曲线图

表1 电机负载特性曲线中几个最值点参数
测试前测功机设置为:1 s后开始加负载,加载量为2(N·m)/s。实验过程为将电机从静止状态迅速升至最高转速,测功机不断加载,随着负载越来越大,转速不断降低,直至降至0时,停止测试。
由图15可以看出,电机最高转速可达到600 rot/min,当电机相电流在10 A~25 A之间,系统效率达到85%以上,说明此时是电机运行最佳状态。在实际测试过程中,可以观察出系统运行相对平稳,而且噪声较低。由于设定限流值为26 A,负载继续增大,电流保持稳定。系统能够输出的最大负载转矩约为62 N·m,表明了该电机控制系统有很强的带载能力。
5 结语
试验测试过程中,将电机运行速度从静止拉至全速时,系统运行相对平稳,且噪声低;即使在运行速度降至较低的情况下,系统仍保持相对平稳的运行,电机各特性曲线连续平滑。这些数据表明在永磁无刷直流电机控制系统应用SVPWM控制技术的可行性,而且充分体现了其在使用过程中所具有的优越的动、静态性能,电机噪音低、转矩波动小、运行平稳。
[1]程抒一,施光林.基于SOC单片机C8051F022的直流电机伺服系统[J].传感技术学报,2005,18(1):146-149.
[2]肖纳川,周力,肖铎.基于模糊PID算法的电动车电机控制器研究[J].电源技术,2015(1):144-146.
[3]程凯,孙凤超.MOSFET驱动电路类型的研究与测试[J].今日电子,2013(5):52-54.
[4]孟彦京,高筱筱,李林涛,等.基于STM32的软起动器程序设计[J].电子器件,2013,36(5):685-689.
[5]戴鹏,吴斌,苏良成,等.基于新型svpwm的npc/h桥五电平逆变器共模电压抑制策略研究[J].电机与控制学报,2015(2).
[6]Xiong X,Sun Y X,Zhu H Q,et al.Research on Drive and Control System of Bearingless Brushless DC Motor for Satellite Flywheel[C]//Applied Mechanics and Materials,2015,703:339-342.
[7]高延荣,舒志兵,耿宏涛.基于Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真[J].机床与液压,2008,36(7):296-299.
[8]徐萍萍,宋建国,王雁峰,等.电力测功机动态测试平台系统[J].北京工业大学学报,2007,33(6):582-586.
郑 宏(1965-),男,汉族,福建武夷山人,江苏大学电气信息工程学院教授,博士,硕士生导师,主要研究方向为大功率电力电子变换器、智能电网及分布式发电与储能技术,zhenghong0511@sina.com;

张佳伟(1990-),男,汉族,江苏南通人,江苏大学电气信息工程学院硕士研究生,主要研究方向为无刷直流电机控制,290396691@qq.com。
Sine Wave Brushless DC Motor Control System Based on STM32
ZHENG Hong*,ZHANG Jiawei,XU Wencheng
(School of Electronic Information and Electrical Engineering,Jiangsu University,Zhenjiang Jiangsu 212013,China)
SVPWM control technology is applied to BLDCM drive control,the sine wave motor control system based on STM32,the hardware part concentrates on the inverter circuit with MOSFET driver,and the relevant research of rotor state and closed-loop current PI control.It illustrates the programming of the control system.After software sim⁃ulation and tests on experiment platform,the feasibility of integrated approach could be verified.
BLDCM;sin-wave current driving;SVPWM;STM32
STM32
A
1005-9490(2016)06-1521-06
8320
10.3969/j.issn.1005-9490.2016.06.046
2015-09-24 修改日期:2015-10-20