液压挖掘机并联混合节能动力系统多目标优化控制策略
2016-12-23崔宁秦四成赵丁选
崔宁,秦四成,赵丁选
(1.吉林大学机械科学与工程学院,130022,长春;2.珠海城市职业技术学院机电工程学院,519000,广东珠海)
液压挖掘机并联混合节能动力系统多目标优化控制策略
崔宁1,2,秦四成1,赵丁选1
(1.吉林大学机械科学与工程学院,130022,长春;2.珠海城市职业技术学院机电工程学院,519000,广东珠海)
针对采用电容蓄能进行能量回收的并联式液压挖掘机混合动力系统提高能量效率和降低转矩变化幅度的问题,提出了一种基于实时优化力矩分配的新型多目标优化控制策略。根据负载特性将由电动机/发电机与柴油机构成的混合动力装置的工况分为高负载和低负载两个采用不同目标转速的工作区,通过曲线拟合对定转速下转矩与能量效率特性关系进行建模,构建以转矩为变量的目标函数,并通过惩罚函数对转矩变化幅度进行限制,提高系统的能量效率并降低转矩变化对系统机械结构的损害。采用仿真程序和模拟实验平台分别进行了实验,以验证该策略的效果。实验结果表明:与固定比例转矩策略相比,系统的最大转矩变化幅度降低了37.9%,总体能量损耗和燃油损耗分别降低了8.74%和8.9%。采用该控制策略后,系统在提供相近的功率输出特性的情况下,其总体的能量消耗、燃油消耗和转矩特性均得到了改善。
能量效率;并联式混合动力;液压挖掘机;控制策略
随着世界范围内工业技术的发展,能源短缺和环境污染问题日趋严重,基于多种能源的混合动力技术的研发是当前工业领域的热点。由电机和发动机共同构成的混合动力系统已成功运用在汽车上[1-4],在工程机械领域也已进行了多年的研究[5]。
挖掘机是工程机械中比较有代表性的一类。由于挖掘机动力系统负载变化比较频繁、波动比较大,发动机大多数时间在非高效区内工作,燃料的利用率低下,排放质量较差,因此改善发动机的燃油效率是混和动力系统的核心问题。并联式混合动力系统是当前挖掘机混合动力系统研究的热点。这类系统采用通过电机的发电和助力的方式来调节发动机工况,使发动机尽可能在高效区工作,从而提高燃油经济性和排放性能[6]。此外电动机可工作于电动或发电状态,减少了系统的动力总成;发动机与电动机的并联驱动也降低了这两大动力总成的功率[7-8]。
控制策略是混合动力系统的核心技术,主要有基于规则的和基于优化的两种类型。基于优化的方法能够得到最优或近似最优的控制效果,是当前的研究热点[9-10]。舒红对一种混联型混合动力系统运行工况进行了分析。基于发动机、电机和蓄电池的效率图,建立了混联型混合动力汽车充电工况和放电工况的系统效率模型。放电工况以系统放电效率最大为优化目标,充电工况根据蓄电池荷电状态不同,分别以系统充电效率最大、系统充电效率与充电功率乘积最大为优化目标,对混合动力系统能量管理策略进行了优化研究[11]。张博等应用PSAT前向仿真软件及矩阵分割全局优化算法,对并联式Plug-in混合动力汽车在不同电能消耗续驶里程下的能量管理策略进行了优化设计研究[12]。
当前混合动力挖掘机的能量管理策略多为基于系统能耗将转矩和转速调节在最佳工作区间[9],但这种策略往往对电机的效率考虑的不够充分,结合电机特性的效率优化是控制器设计的重要目标。另外,转矩的变化幅度是一个尚未充分考虑的目标,由于疲劳特性等的影响,该目标将对系统的使用寿命和可靠性造成较大影响。本文针对液压挖掘机混合动力系统的工作特性,提出了一种基于实时优化的新型算法,以实现上述目标。
1 系统描述
本文所用的并联式混合动力液压挖掘机节能系统结构如图1所示。在动力结构上,采用了在一般挖掘机系统中通用的双泵供油的方式。为了实现能量回收,在主泵上安装了一个采用柴油机与电动/发电机并联驱动液压泵的混合动力装置,并通过一个包含能量回收功能的动力源驱动电动/发电机。该动力源由变换器/逆变器、超级电容及蓄电池等共同构成。混合动力装置的机械能通过分动箱直接驱动主泵带动液压系统做功。电动/发电机可在柴油机的带动下处于发电状态,并经过变换器/逆变器将这一部分能量存储到超级电容中,超级电容处于充电状态,并可将电能储存在电池中,也可使电动/发电机处于电动状态,与柴油机一起驱动主泵。主泵为液压柱塞泵,其排量的调节通过对倾角液压缸的位移进行控制来实现。
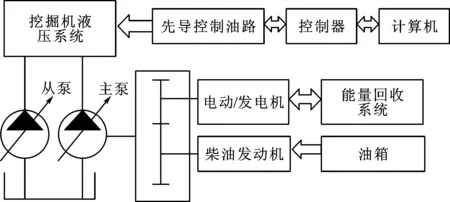
图1 并联式液压挖掘机混合动力系统
2 控制算法
2.1 实时优化控制策略
本文提出的实时优化控制策略如图2所示。操作者发出的控制指令通过挖掘机系统的逆模型转化为动力系统需要的输出,在经过负载工作区判断后,获得泵斜盘的期望角度和泵的期望转速及期望转矩。系统通过斜盘倾角回路和混合动力系统回路实现对泵的控制。期望转矩经优化分配后,可获得柴油机的期望转矩Tcd、电机的期望转矩Tdd或发电机的期望转矩Tgd,以这2个期望转矩和泵的期望转速转矩为优化变量设计控制器来完成对电机与柴油机的控制。
2.2 基于力矩分配的能量效率优化
系统各动力组成部分的能量效率的提高是节能的关键,因此本文优化控制的核心便是优化目标函数的设计。为了实现节能的目标,需要让系统做的有用功达到最大,因此设定下面的目标函数
J=min(kcPcd)2+(kdPdd)2+(kgPdg)2+
(ktcΔTtc)2+(ktdΔTtd)2+(ktgΔTtg)2
(1)

(a)控制总图
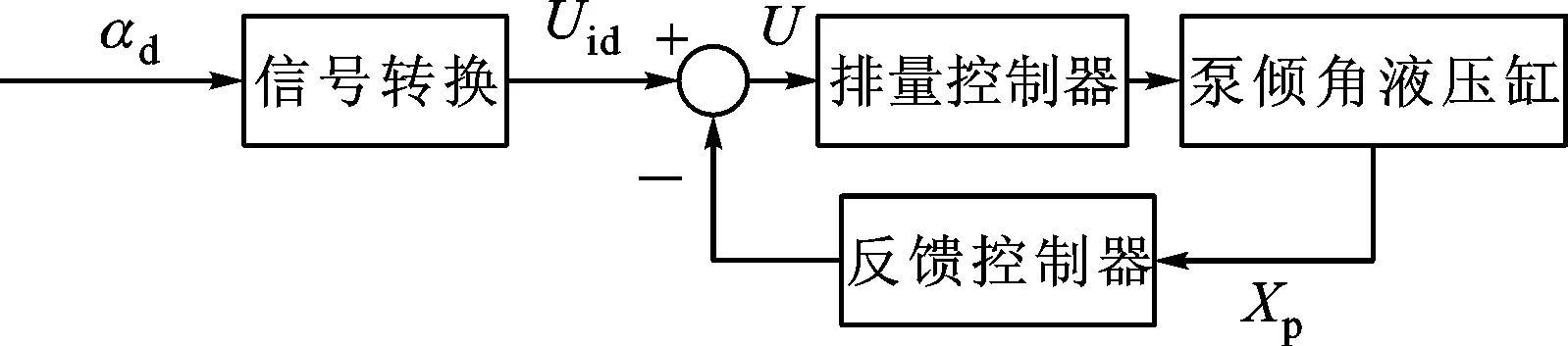
(b)泵倾角控制器
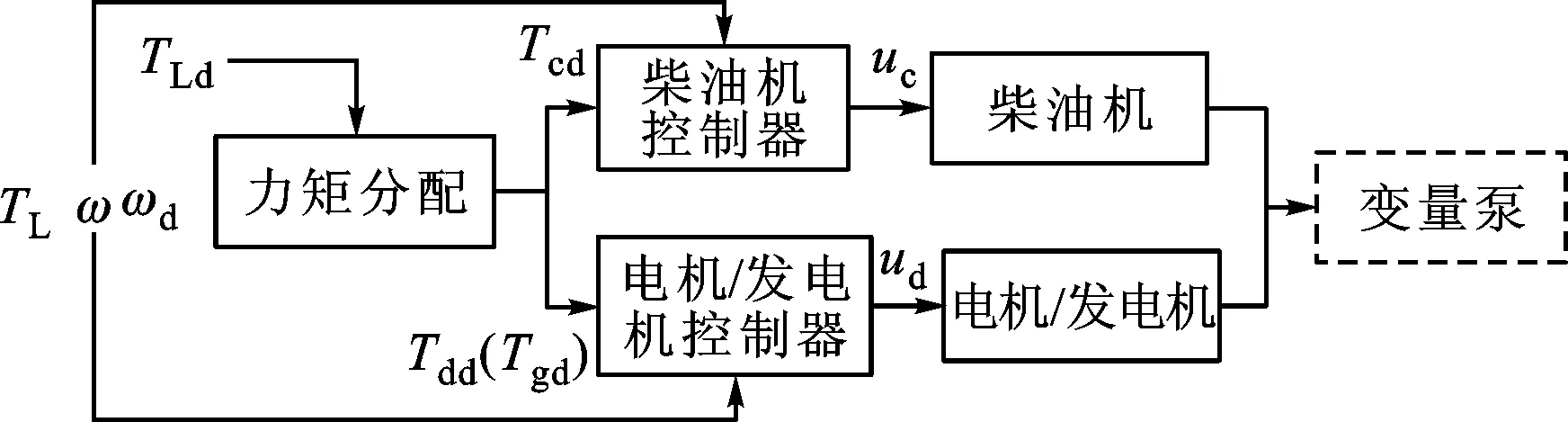
(c)混合动力系统回路图2 实时优化控制策略
式中:k(kc,kd,kg)为加权系数;Pcd为柴油机消耗能量与最高效率状态下消耗能量的差值;Pdd为电机消耗能量与最高效率状态下消耗能量的差值;Pdg为发电机实际发电量与最高效率状态下发电量的差值。由于电机和发电机为一体,因此kd和kg必有一个为0。ΔT(ΔTc,ΔTd,ΔTg)为转矩变化幅度的绝对值。kt(ktc,ktd,ktg)为惩罚函数式的加权系数,在ΔT较小时为0,在ΔT超过一定幅度时以一定斜率增大,ktd和ktg必有一个为0。
函数J代表了系统柴油机和电机所耗费的无用功能量之和。该函数的意义是使系统在维持既定的功率输出的前提下,令系统的无用功总量达到最小,间接令系统能量效率达到最高。为了维持既定的功率输出,系统需令混合动力系统的功率输出与负载功率相等,即满足负载功率约束
Pl=Pc+Pd-Pg
(2)
由于电动机/发电机与柴油机角速度相同,该约束可转化为
Tl=Tc+Td-Tg
(3)
式中:Tl为负载转矩;Tc、Td、Tg分别为柴油机、电动机与发电机的转矩。
在角速度ω一定的前提下,柴油机的最高效率点时的功率Pcm为一个与转矩Tc相关的函数
Pcm=Fc(Tc,ω)
(4)
损耗能量为
Pcd=Pcm-Pciηci
(5)
式中:Pci为柴油机的输入功率;ηci为柴油机的能量效率参数,如下文所述,在转速一定的条件下,可以拟合为柴油机转矩Tc的函数。类似地,电机处于电动机和发电机状态在角速度ω时的损耗能量为
Pdd=Pdm-Pdiηdi
Pdg=Pdm-Pdiηdi
(6)
得到针对柴油机、电动机和发电机的优化策略
J=minF(T,ω,ΔT)
stc.Tl=Tcd+Tdd-Tgd
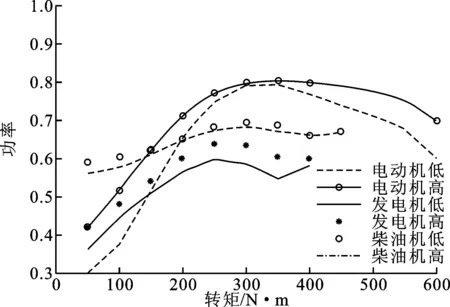
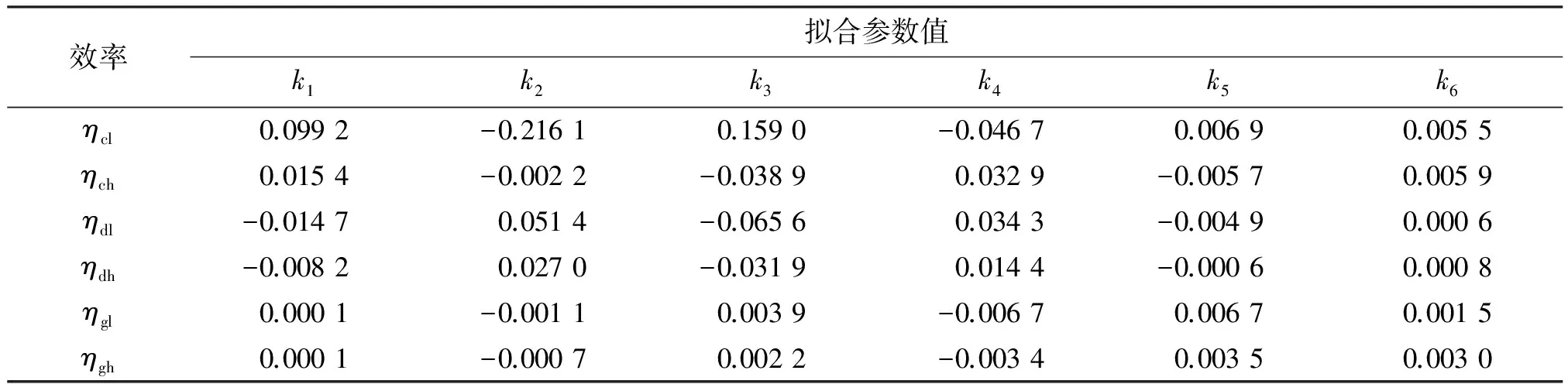
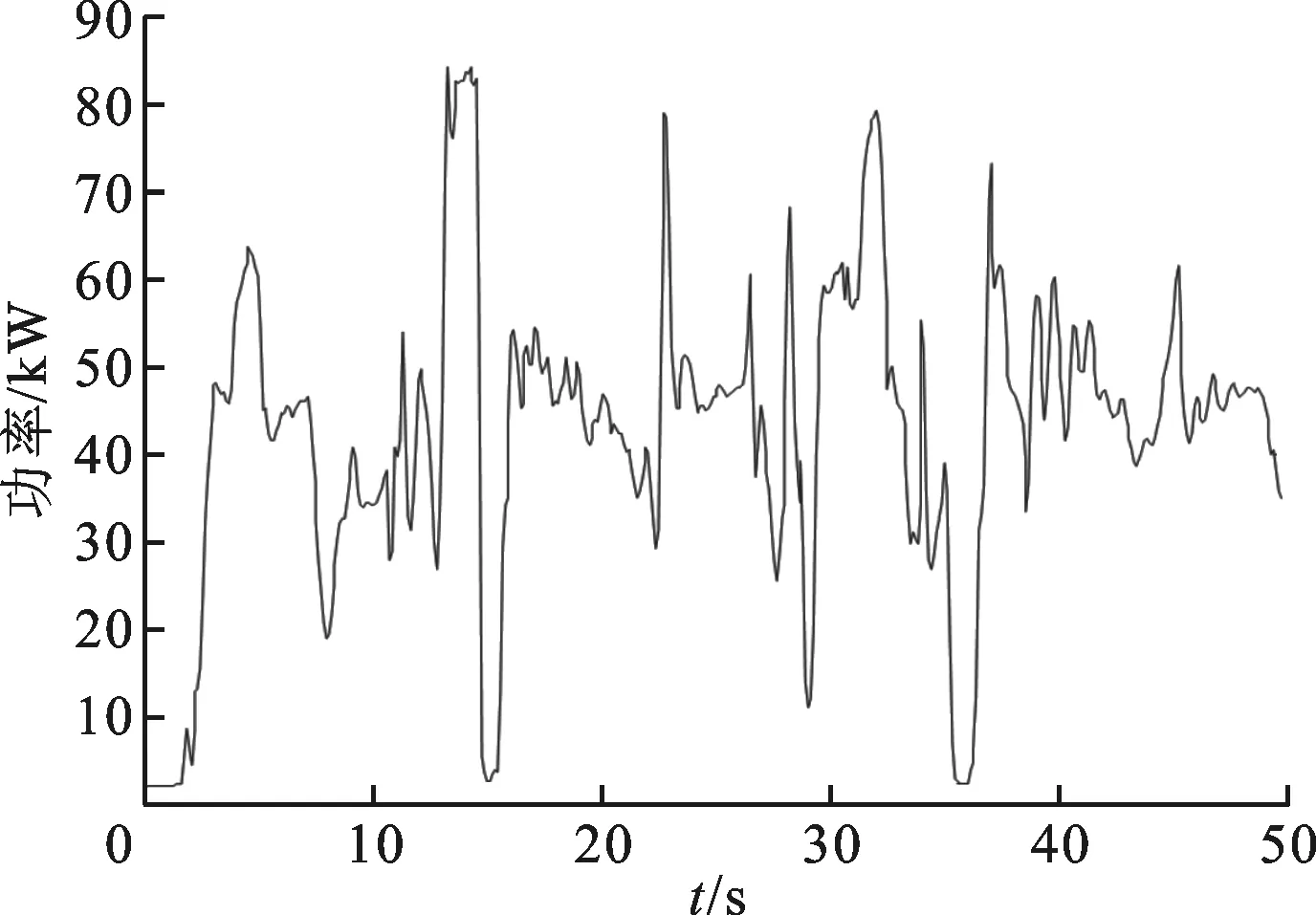
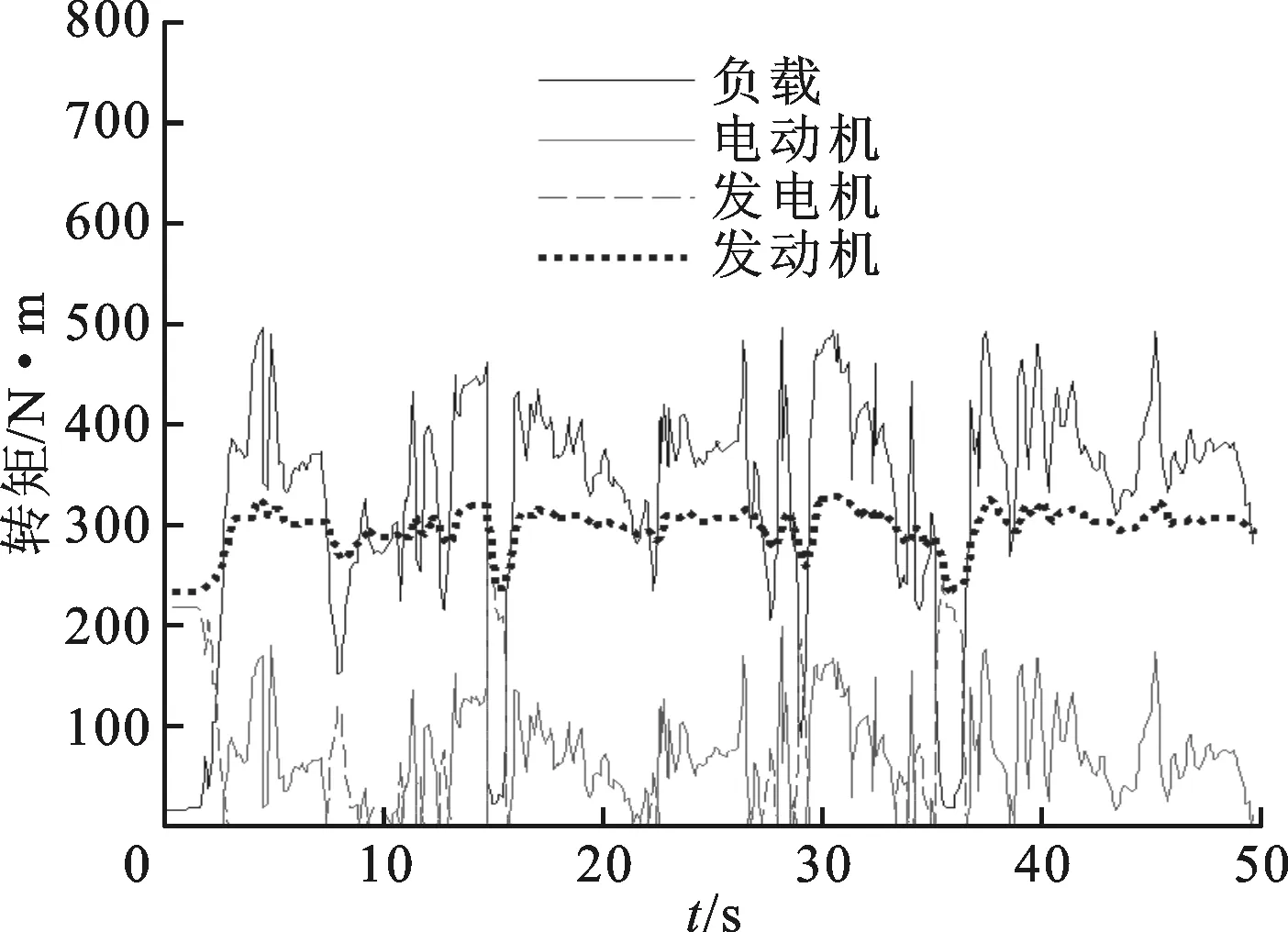
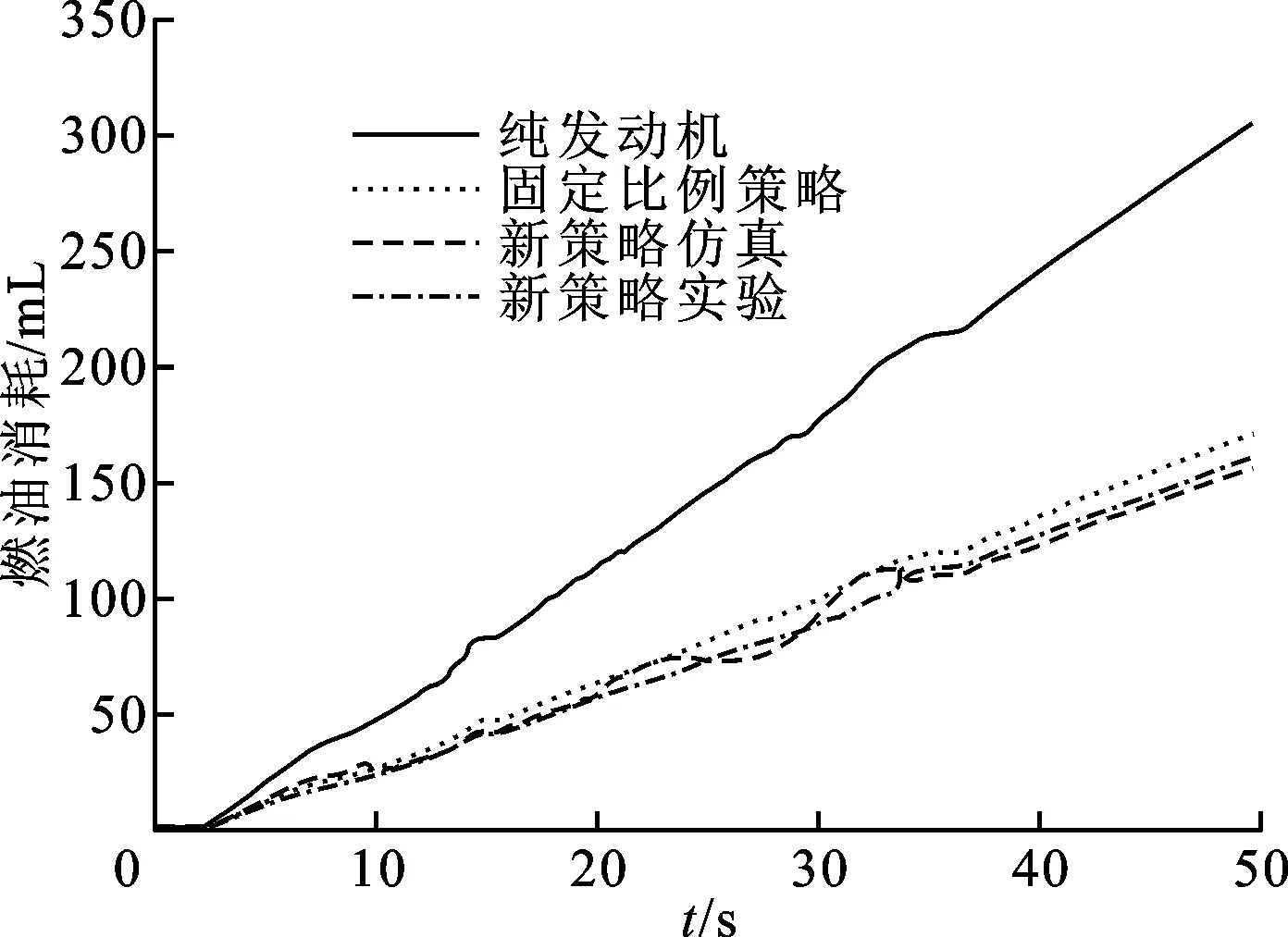
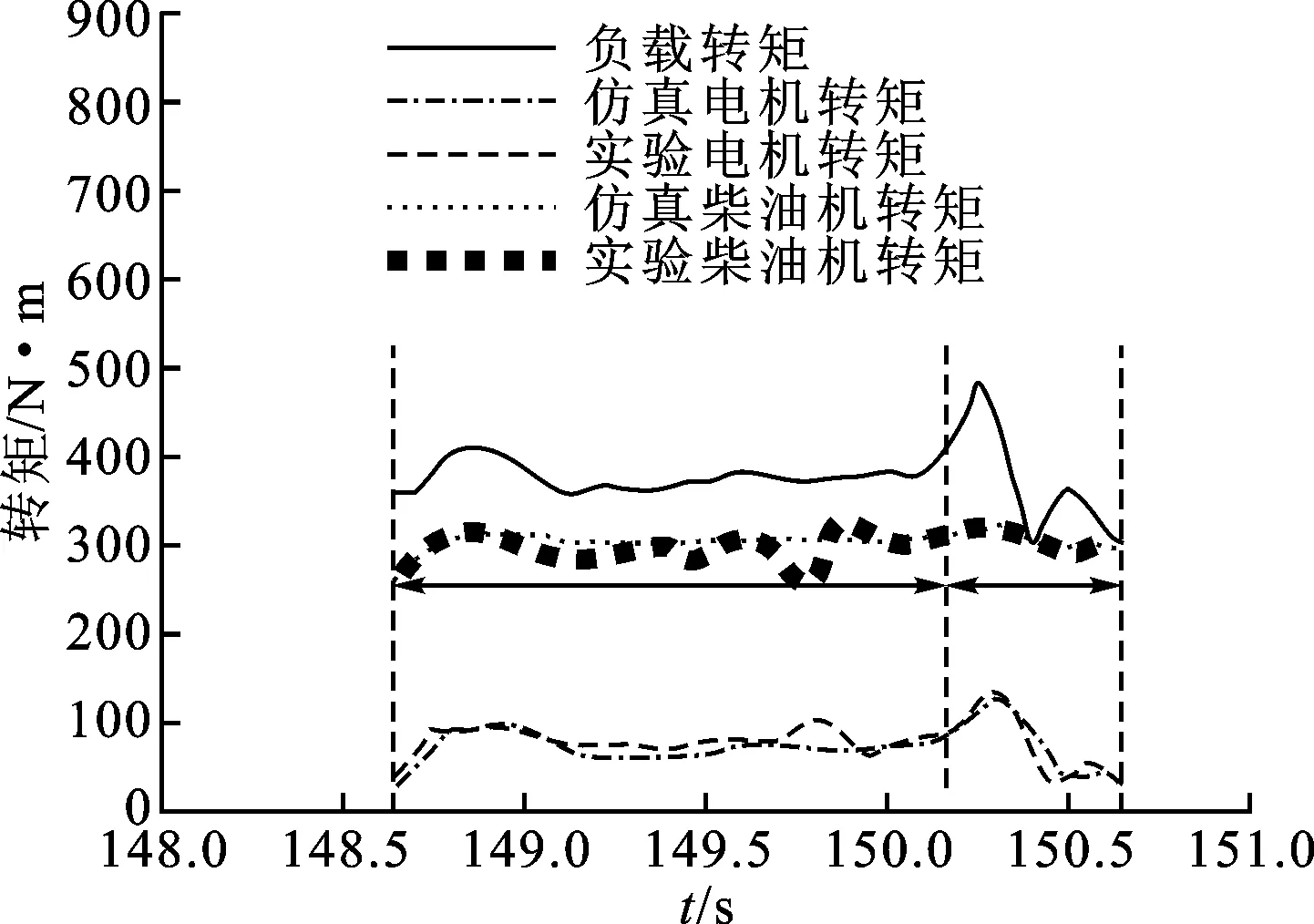
Tcmin Tdmin Tgmin ΔT<Δ (7) 其中,F(T,ω,ΔT)=(kcPcd)2+(kdPdd)2+(kgPdg)2+(ktcΔTtc)2+(ktdΔTtd)2+(ktgΔTtg)2,T(Tcd,Tdd,Tgd)为柴油机、电动机与发电机的期望转矩。由于Pcd、Pdd、Pdg等变量均可表示为转矩的函数,该函数事实上是通过调节转矩来实现对能量效率的优化,Δ(Δc,Δd,Δg)为转矩变化幅度阈值。 本文算法的优越性在于采用了实时优化函数的方法来设定期望转矩。除实现本文的目标外,还可针对油耗比、经济性等多种目标需求进行调整。如参照电池电量,可设定充电与发电的切换系数的取值范围,结合燃油价格和电价格通过调节系数获得最优的价格比等[13]。 2.3 算法实现 图3 柴油机油耗特性曲线 本文需根据柴油机及电机的特性,依照前文所述的算法,对控制策略进行有针对性的调整。图3所示为本系统所用的柴油机典型工况下的油耗特性曲线。通过对该图进行分析,可得到如下条件:柴油机在转速为1 200~1 800 r/min、转矩为250~400 N·m的范围内,是高效率工作区。转速为1 300 r/min、转矩为270 N·m,转速为1 700 r/min、转矩为350 N·m分别是两个高效率的工作点,接近最高的效率,同时这两个点相距足够远,可提供不同的功率输出。因此,依照这两个转速分别设置高功率工作模式和低功率工作模式。 为了获取最优转矩,可以通过多项式曲线拟合的方式获得在这两个转速下的柴油机的工作效率与力矩之间的特性。使用类似的方法,分别构建了1 200和1 800 r/min情况下,电机处于发电机状态和电动机状态时转矩与效率的关系特性曲线。如图4所示分别为转速在1 200和1 800 r/min情况下,柴油机、发电机及电机的转矩与效率的关系特性曲线,拟合公式为 η=k1τ5+k2τ4+k3τ3+k4τ2+k5τ+k6 (8) 式中:η为效率;τ为转矩;k1~k6为多项式系数。表1给出了转矩与效率的关系特性曲线中的参数。其中:ηcl、ηdl、ηgl分别为柴油机、电动机和发电机在转速为1 200 r/min下的效率;ηch、ηdh、ηgh分别为柴油机、电动机和发电机在转速为1 800 r/min下的效率。 图4 转矩与效率的关系特性曲线 本算法的目标函数为一个二次型函数,经微分后结合转矩约束可化为一个高次多项式,求取其为0时的根,并结合转矩范围约束和最高效率点位置可获得最优解或边界次优解。负载转矩Tl的调节可通过调节柱塞泵的斜盘倾角实现。 表1 效率转矩特性拟合参数值 电动机/发电机本身为一个无刷直流电机,本文采用文献[14]中的直接转矩(direct torque control, DTC)控制器来对其进行控制。柴油机的控制由一种简单而高效的PID控制器来实现 (9) 式中:ui为控制输出;ωi和αi分别为实际的角速度和其积分;下标d代表期望值;kPi、kIi、kDi为PID控制器系数。 3.1 实验设备 为了对算法的结果进行验证,运用MATLAB/simulink程序搭建了实验程序。该程序在考虑初始条件和边界条件下建立包含柴油机、电动/发电机及泵等系统的仿真模型,并可将实际功率需求加载到模型中,对同一工况进行多次的重复仿真实验。图5为用于实验的负载模拟系统。该系统包含了由电动/发电机、柴油机和能量回收系统构成的混合动力系统,并采用PWM对电比例溢流阀进行控制,实现负载压力的模拟。通过工控机将在实体车上采集到的各种工况下不同执行机构的作业负载读入生成流量和压力曲线,将其输入仿真程序和实验平台,即可实现工况模拟和复现,并在近似的工况下进行控制策略的比较实验。 图5 模拟实验系统 3.2 实验过程及结果 为了考察新策略的效果,以某7 t挖掘机(柴油机额定功率160 kW)为原型。使用纯柴油机、固定比例转矩策略(柴油机与电动/发电机转矩分别为总转矩的70%和30%)与多目标优化策略进行对比实验。 图6 系统50 s内的功率需求 (a)仿真实验转矩的优化结果 (b)模拟实验转矩的优化结果 (c)总体能量的消耗 (d)燃油消耗图7 50 s仿真实验的结果 图6为在典型工况下,系统50 s内的实际需求功率载荷谱曲线,图7为系统50 s内的仿真实验结果。图7a和图7b分别为仿真及实验中的转矩分配的结果,由图可知,由于使用了多目标优化控制策略,柴油机的转矩被很好地控制在了高效的转矩区域,并且在工作过程中也在一定程度上兼顾了电动机/发电机系统的工作效率。最大的转矩变化出现在约35 s处。固定比例转矩策略中,柴油机转矩幅度为61.7 N·m/s,发电机为26.5 N·m/s,而此时柴油机最大幅度为29.4 N·m/s,发电机最大幅度为38.3 N·m/s,最大转矩变化幅度降低了37.9%,可见新算法不仅降低了转矩的变化幅度,同时也考虑了电机响应速度较快的特性,并且两个机械系统的转矩变化较为均衡。图7c为能量损耗结果,图7d为燃油消耗结果,由图可见,使用混合动力系统的能耗比使用纯柴油机的能耗有所降低,而使用多目标优化的控制策略后,系统的能耗得到了更大的降低,同时也降低了燃油的损耗。与固定比例转矩策略相比,新策略的总体能量损耗降低了8.74%,燃油损耗降低了8.9%。相对来说,模拟实验中的转矩结果存在一定干扰及延迟,因此效果略逊于仿真实验结果。 图8 转矩变化结果 图8为150 s左右出现的较为典型的转矩变化结果。在图8a处,通过对电机和柴油机的转矩分别调节,使二者均衡变化,避免了转矩变化过快;在图8b处,目标转矩变化超出了阈值,因此只令电机和柴油机的转矩以阈值上限变化。这虽然使系统动力学性能有所降低,但对机械系统起到了较好的保护作用,同时考虑泵的特性,这种剧烈变化一般只在刚性碰撞等特殊状况下发生,此时泵的输出变化在事实上对系统的性能影响较小。 以采用电容蓄能进行能量回收的并联式液压挖掘机混合动力系统为研究对象,提出了一种基于转矩分配的多目标优化策略,提高系统的能量效率并降低转矩变化幅度以保护机械结构。基于Matlab/simulink的仿真平台和包含负载模拟系统的模拟实验平台进行本文所提策略与固定比例转矩策略的对比实验,实验结果表明: (1)通过对混合动力系统柴油机和电动机/发电机的转矩进行优化控制,不仅可实现各部分能量效率及总体能量效率的提高,还可以改善系统的转矩变化特性,以保护机械结构,提高机械系统可靠性。 (2)使用了新策略的系统与使用固定比例转矩控制策略的系统相比,其转矩变化幅度、总体能量消耗和燃油消耗均得到了改善。 (3)改变优化目标函数中的加权系数和约束,可以针对不同的工况和工作需求对上述目标进行适当调整。 [1] STELSON K A. Saving the world’s energy with fluid power [C]∥Proceedings of the 8th JFPS International Symposium on Fluid Power, 2011: 1-7. [2] BORHAN H, VAHIDI A, PHILLIPS A M, et al. MPC based energy management of a power-split hybrid electric vehicle [J]. IEEE Transactions on Control Systems Technology, 2012, 20(3): 593-603. [3] OPILA D F, WANG X, MCGEE R, et al. An energy management controller to optimally trade off fuel economy and drivability for hybrid vehicles [J]. IEEE Transactions on Control Systems Technology, 2012, 20(6): 1490-1505. [4] 于安才, 姜继海. 液压混合动力挖掘机回转装置控制方式的研究 [J]. 西安交通大学学报, 2011, 45(7): 30-33. YU Ancai, JIANG Jihai. Control strategy for hydraulic hybrid excavator slewing [J]. Journal of Xi’an Jiaotong University, 2011, 45(7): 30-33. [5] 谭兆钧, 韩嘉骅, 姚进. 混合动力装载机变频泵控转向液压系统的鲁棒控制器设计 [J]. 四川大学学报: 工程科学版, 2013, 45(S1): 177-182. TAN Zhaojun, HAN Jiahua, YAO Jin. Robust controller design for variable frequency pump-control steering hydraulic system of hybrid wheel loader [J]. Journal of Sichuan University: Engineering Science Edition, 2013, 45(S1): 177-182. [6] WANG L, BOOK W J, HUGGINS J D. Application of singular perturbation theory to hydraulic pump controlled systems [J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(2): 251-259. [7] HO T H, AHN K K. Speed control of a hydraulic pressure coupling drive using an adaptive fuzzy sliding-mode control [J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(5): 976-986. [8] LIU J, PENG H. Modeling and control of a power split Hybrid vehicle [J]. IEEE Transactions on Control Systems Technology, 2008, 16(6): 1242-1251. [9] 肖清, 王庆丰, 张彦廷. 液压挖掘机电容蓄能式并联混合动力系统结构及控制策略研究 [J]. 中国机械工程, 2008, 19(5): 625-629. XIAO Qing, WANG Qingfeng, ZHANG Yanting. Research on structure and control strategy of parallel hybrid system applied to hydraulic excavator using capacitor as accumulator [J]. China Mechanical Engineering, 2008, 19(5): 625-629. [10]王磊. 一种混联式混合动力客车能量管理及模式切换协调控制研究 [D]. 上海: 上海交通大学. 2013: 11-12. [11]舒红, 刘文杰, 袁景敏, 等. 混联型混合动力汽车能量管理策略优化 [J]. 农业机械学报, 2009, 40(3): 31-35. SHU Hong, LIU Wenjie, YUAN Jingmin, et al. Optimization of energy management strategy for a parallel series HEV [J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(3): 31-35. [12]张博, 李君, 高莹, 等. Plugin混合动力汽车能量管理策略优化设计 [J]. 农业机械学报, 2009, 40(9): 20-25. ZHANG Bo, LI Jun, GAO Ying, et al. Optimization of plugin hybrid electric vehicle energy management control strategy [J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(9): 20-25. [13]秦大同, 叶心, 胡明辉, 等. ISG型中度混合动力汽车驱动工况控制策略优化 [J]. 机械工程学报, 2010, 46(12): 86-92. QIN Datong, YE Xin, HU Minghui, et al. Optimization of control strategy for medium hybrid electric vehicle with ISG at drive condition [J]. Journal of Mechanical Engineering, 2010, 46(12): 86-92. [14]杨建飞. 永磁同步电机直接转矩控制系统若干关键问题研究 [D]. 南京: 南京航空航天大学, 2011: 20-25. (编辑 武红江) A Multi-Object Optimal Control Strategy for a Parallel Hybrid Power System in Hydraulic Excavators CUI Ning1,2,QIN Sicheng1,ZHAO Dingxuan1 (1. College of Mechanical Science and Engineering, Jilin University, Changchun 130022, China;2. School of Mechanical and Electrical Engineering, Zhuhai City Polytechnic, Zhuhai, Guangdong 519000, China) A novel optimal torque control allocation strategy for the control of the power system that consists of the DC motor/generator and the diesel engine is proposed to improve the energy efficiency and to decrease the torque amplitude of variation for a parallel hybrid power system with an energy regenerator by capacitor for hydraulic excavator. Two work areas with different rotate speeds are built based on load forces. Curve fitting is used to model the character between the torque and the energy efficiency, and a penalty function is built to decrease torque range, then multi-object optimal cost functions are put forward. Experiments are performed by simulation program on a simulated experiment platform. The results and a comparison with the constant torque strategy show that the proposed strategy decreases the torque amplitude of variation by 37.9%, the whole energy by 8.74%, and the fuel consumption by 8.9%. It can be concluded that the new strategy improves the energy consumption, the fuel consumption and the impact on mechanics system caused by torque range. energy efficiency; parallel hybrid system; hydraulic excavator; control strategy 2016-01-12。 作者简介:崔宁(1973—),男,博士生;赵丁选(通信作者),男,教授,博士生导师。 基金项目:国家高技术研究发展计划资助项目(2009AA044403)。 时间:2016-04-15 10.7652/xjtuxb201606018 TP137.51 A 0253-987X(2016)06-0116-06 网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20160415.1612.012.html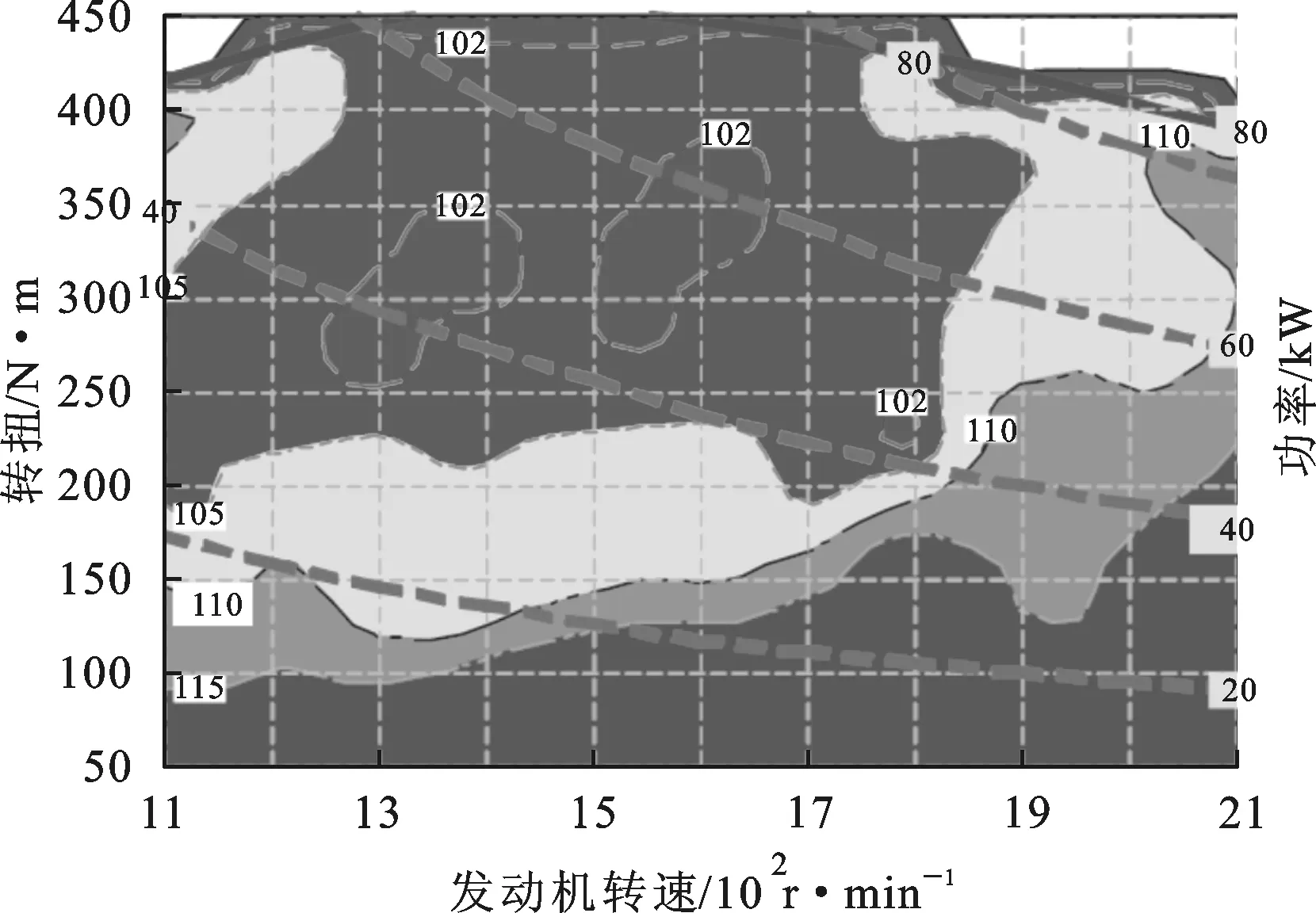
3 实 验



4 结 论