改进型滑模观测器的永磁同步电机无传感器控制策略
2016-12-23王悍枭刘凌吴华伟
王悍枭,刘凌,吴华伟
(1.湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,441053,湖北襄阳;2.西安交通大学电气工程学院,710049,西安)
改进型滑模观测器的永磁同步电机无传感器控制策略
王悍枭1,2,刘凌2,吴华伟1
(1.湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,441053,湖北襄阳;2.西安交通大学电气工程学院,710049,西安)
针对永磁同步电机(PMSM)实际运行时定子电阻和电感常发生随机变化的情况,提出了一种可进行永磁同步电机无传感器控制的定子电阻和电感在线辨识的改进型滑模观测器。为了削弱系统高频抖振,用近似饱和函数代替开关函数;基于Lyapunov稳定性理论,在保证观测器稳定性的同时,进行定子电阻和电感参数辨识,并将其反馈到观测器模型,实时修正观测器模型参数,从而提高估算精度;采用锁相环技术计算出转子位置和速度信息,将其反馈到电机控制系统。数值仿真结果表明,改进型滑模观测器能够快速、准确地跟踪转子位置,估算转子速度,且能辨识定子电阻和电感值并进行反馈,实现永磁同步电机无传感器控制。
永磁同步电机;滑模观测器;无传感器控制;近似饱和函数;参数辨识
永磁同步电机(permanent magnet synchronous motor,PMSM)具有结构简单、体积小、质量轻、损耗小、效率高、功率因数高等优点,在工业生产和民用生活中被广泛应用,比如工业上的数控机床、机器人,民用上的空调制冷系统、洗衣机的调速系统等。当前,永磁同步电机高性能控制中应用最成熟、最广泛的是矢量控制。PMSM矢量控制系统需要获取准确的电机转子位置和速度信息,常用途径是通过安装机械传感器(如光电编码器、旋转变压器等)来获取所需信息,但机械传感器占用空间大、安装复杂,同时还会大大增加成本。因此,永磁同步电机无传感器控制技术的发展就显得尤为必要。
无传感器控制技术是通过检测其他相关电信号估算电机转子位置和速度信息而省略机械传感器的技术。目前,常见的无传感器控制方法主要有高频信号注入法[1]、模型参考自适应(MRAS)估算法[2]、基于人工智能理论的估算法(如神经网络法)以及基于各种观测器的估算法(如滑模观测器(SMO)法、全阶/降阶状态观测器法)等。文献[1]中介绍了一种基于高频信号注入法的转速观测器,该方法应用于具有凸极效应的永磁同步电机中非常有效,但无法应用于普通的隐极式电机。文献[2]中介绍了基于MRAS理论的转速观测法,该方法可以准确地观测出电机的转速,但响应速度慢。文献[3-4]中介绍了一种基于滑模变结构建立的观测器,响应速度优于MRAS估算法,但滑模控制律中的开关函数具有不连续性,会造成系统存在抖振现象。文献[5-8]中分别采用饱和函数、sigmoid函数、双曲正切函数和边界层可变的正弦型饱和函数代替开关函数,都能抑制抖振,提高转子位置和速度的估算精度。文献[9]采用两级低通滤波器对反电动势进行滤波,但是滤波器的截止频率太高,滤波效果不明显,截止频率太低,反电动势存在大的相位滞后,所以需要对转子位置进行相位补偿。文献[10-14]分别采用分数阶滑模、高阶滑模和非奇异快速终端滑模的方法,虽然控制效果好,但是结构复杂,计算量大。
本文在传统滑模观测器的基础上,提出一种在线辨识永磁同步电机的定子电阻和电感参数的改进型滑模观测器。采用一种近似饱和函数代替开关函数,减弱系统高频抖振现象。基于电机动力学模型和Lyapunov稳定性定理,在保证观测器稳定性的同时,对定子电阻和电感进行在线辨识,并且对参数进行反馈。最后采用锁相环技术获得电机转子位置和速度信息。与分数阶滑模、高阶滑模和非奇异快速终端滑模相比,改进型滑模观测器结构简单,计算量小。经数值仿真结果验证,与传统滑模观测器相比,改进型观测器提高了转子位置和速度的估算精度,且能够进行定子电阻和电感参数在线辨识,参数辨识快速、准确,误差小、精度高。
1 永磁同步电机数学模型
永磁同步电机(表贴式)在两相静止坐标系下的数学模型可以描述为
(1)
(2)
式中:iα、iβ、uα、uβ、eα、eβ分别为α、β两相的定子电流、电压、反电动势;Rs为定子电阻;Ls为定子绕组等效电感;ψf为转子磁链;ωe为转子电角速度;θe为转子位置电角度。由式(2)推导出式(3),即求得永磁同步电机转子位置和速度
(3)
2 永磁同步电机无传感器滑模控制
2.1 滑模观测器的构建
PMSM传统滑模观测器的数学模型为
(4)
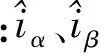
由式(4)减式(1)得到定子电流误差方程
(5)

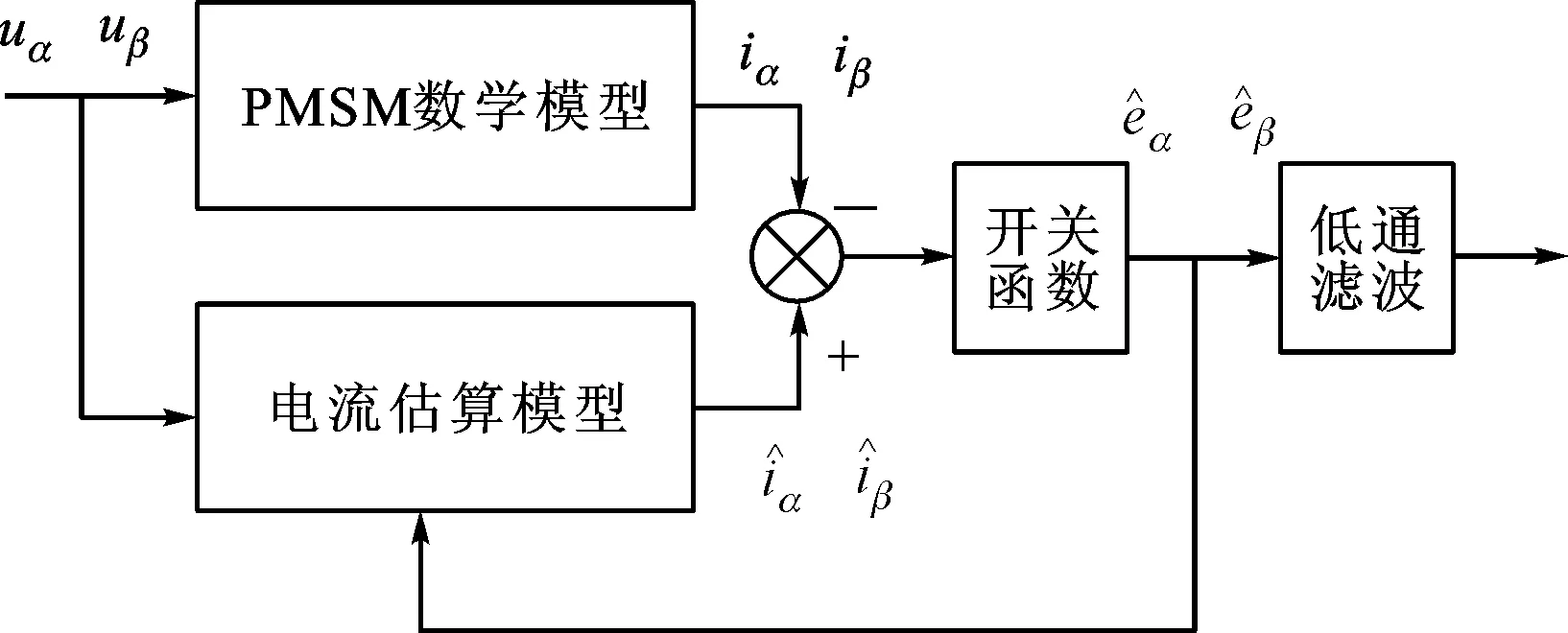
图1 传统滑模观测器结构图
2.2 定子参数辨识的稳定性分析
本文提出改进型滑模观测器对电机转子位置和速度信息进行估算,以减弱系统抖振,提高系统的动态性能,同时基于Lyapunov稳定性定理估算出定子电阻和电感值,并反馈给观测器模型,提高估算精度。
永磁同步电机在低速运行时,定子电阻会随温度升高而变化,而电机在高速运行时,定子电感也会发生变化,影响滑模观测器的估算精度。在进行转子位置和速度估算的同时,利用传统滑模观测器的输入输出变量对永磁同步电机的定子电阻和电感进行在线辨识,将辨识出来的参数值进行反馈,实时修正观测器的数学模型,可以使观测器估算精度更高。
(6)
由式(6)减式(1)可得
(7)

根据滑动模态的存在性条件,构造Lyapunov函数为
(8)

由于定子电阻和电感误差项的加入,所以系统滑动模态需满足下式
(9)
根据传统滑模观测器的稳定性分析可知
(10)
令式(9)中
(11)
(12)
则可得
(13)
(14)
根据系统的稳定性分析,采用定子电阻和电感在线辨识的滑模观测器与传统滑模观测器的稳定性条件一致。通过式(13)、(14)可以估算出定子电阻和电感值,将得到的定子参数实时值反馈给可调节模型,使模型的参数更加精确,从而提高滑模观测器的精度,估算出更准确的电机转子位置和速度信息。
为了减小由于传统滑模观测器中开关函数非线性产生的系统高频抖振,采用近似饱和函数代替开关函数。近似饱和函数下式所示
(15)
式中:ssat(s)为近似饱和函数;n取正奇数;δ为边界层。
由于在边界层内饱和函数是连续函数,因此可适当地削弱抖振。n越小切换速度越快,但抖振会变大,n越大切换速度变慢,但抖振减小,适当取值可以提高系统动态性能。特别是,当n=1时,该函数则是饱和函数。
采用定子参数在线辨识的永磁同步电机改进型滑模观测器结构如图2所示。
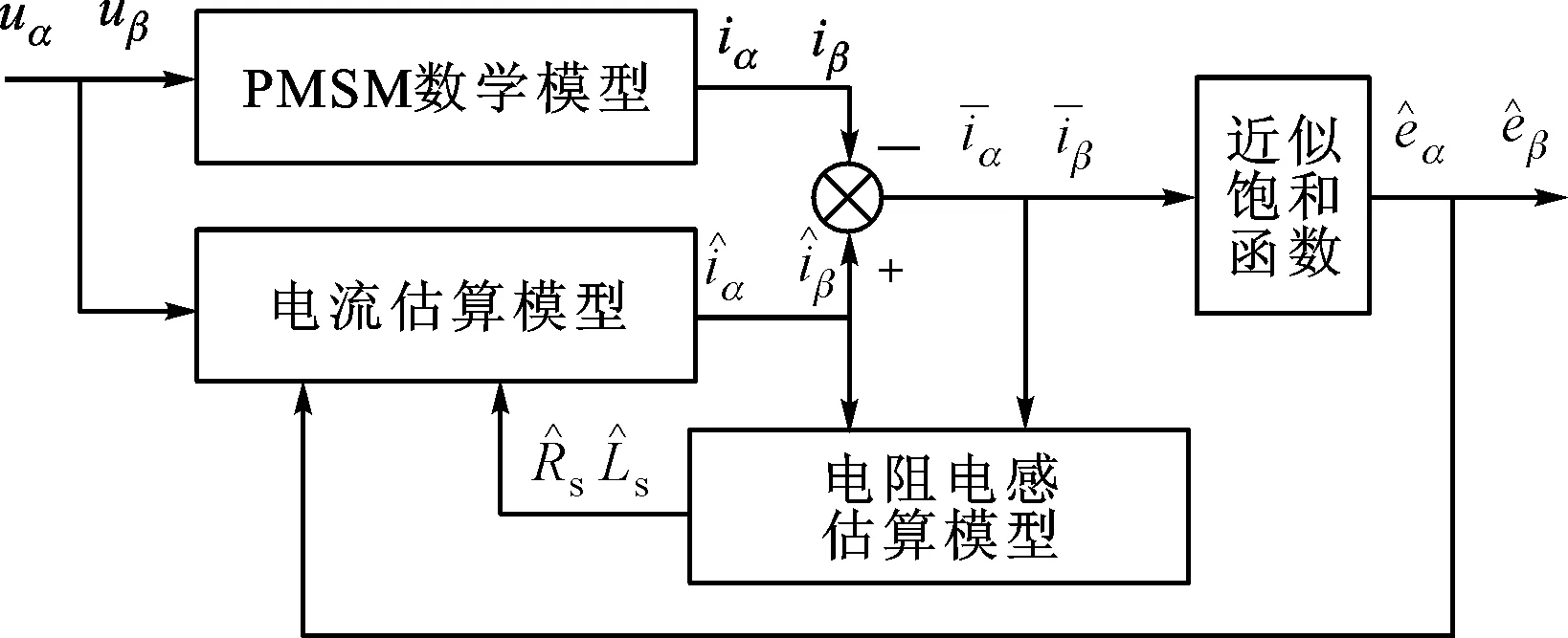
图2 采用定子参数在线辨识的改进型滑模观测器
2.3 采用锁相环的转子位置和速度估算
由于传统滑模观测器引入一阶低通滤波器来滤除反电动势中的高频信号,导致估算的反电动势存在大的相位滞后,因此需要对转子位置进行相位补偿。另外,由于式(3)中反正切函数的计算需要反复查表,导致在进行转子位置与速度的估算时,容易产生计算噪声,而且当转子角度为±π时,计算偏差大,因此本文采用锁相环(PLL)技术进行电机转子位置与速度估算。锁相环原理如图3所示。
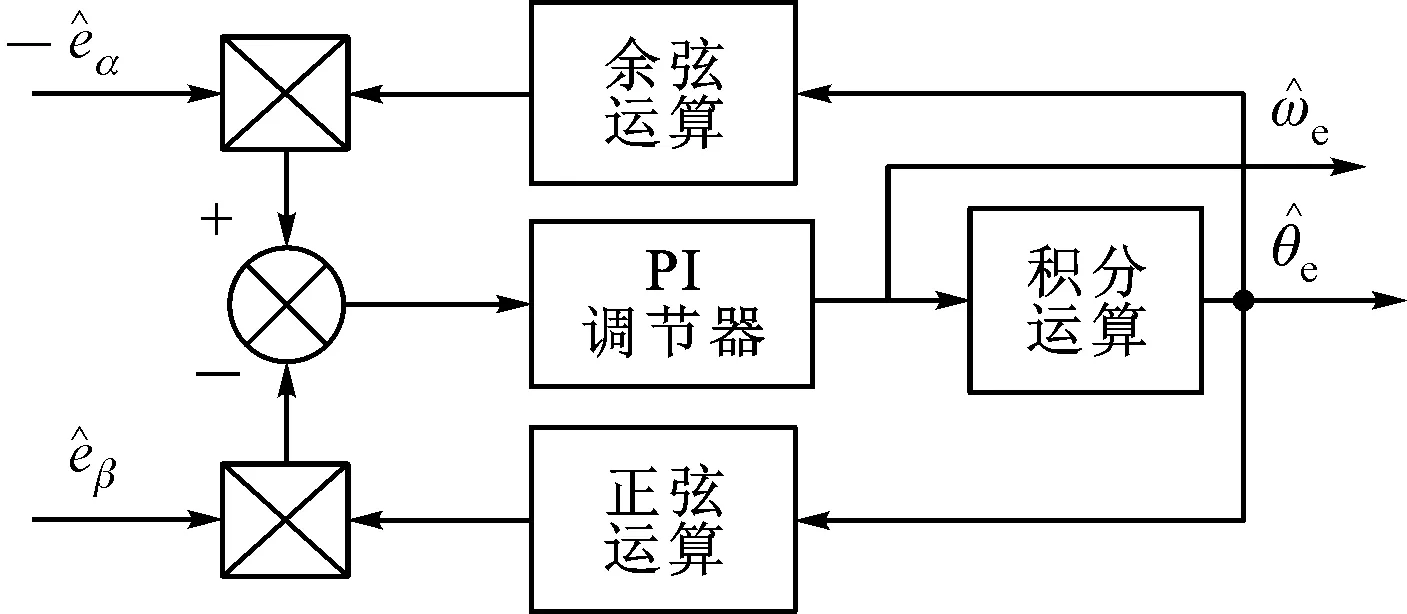
图3 锁相环原理图
锁相环具有良好的相位跟踪性能,可以省去传统滑模观测器中滤波器部分,而永磁同步电机转子位置和速度信息直接由PI调节器计算得到。
3 仿真结果与分析
基于MATLAB/Simulink平台建立永磁同步电机数值仿真模型,采用id=0的矢量控制策略,实现永磁同步电机的无传感器控制。仿真时采用阶跃函数进行转速设定,所采用的电机参数为:额定功率PN=3kW,额定电压UN=200V,额定电流IN=18A,额定转速nN=3 000r/min,定子电阻Rs=0.258Ω,定子电感Ls=0.827mH,转子磁链Ψf=0.005 7Wb,极对数p=5。
图4为永磁同步电机基于改进型滑模观测器的无传感器控制系统结构框图。
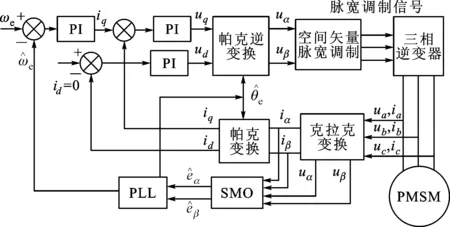
图4 改进型滑模观测器的永磁同步电机控制系统结构图
电机空载运行,初始转速设定为500r/min,采用传统滑模观测器的仿真结果如图5、图6所示,转速估算误差最大为±60r/min;转速稳定时,估算误差为±20r/min,与给定转速之间误差为±10r/min。由图7可见,传统滑模观测器估算的电机转子位置存在较大的滞后和误差。
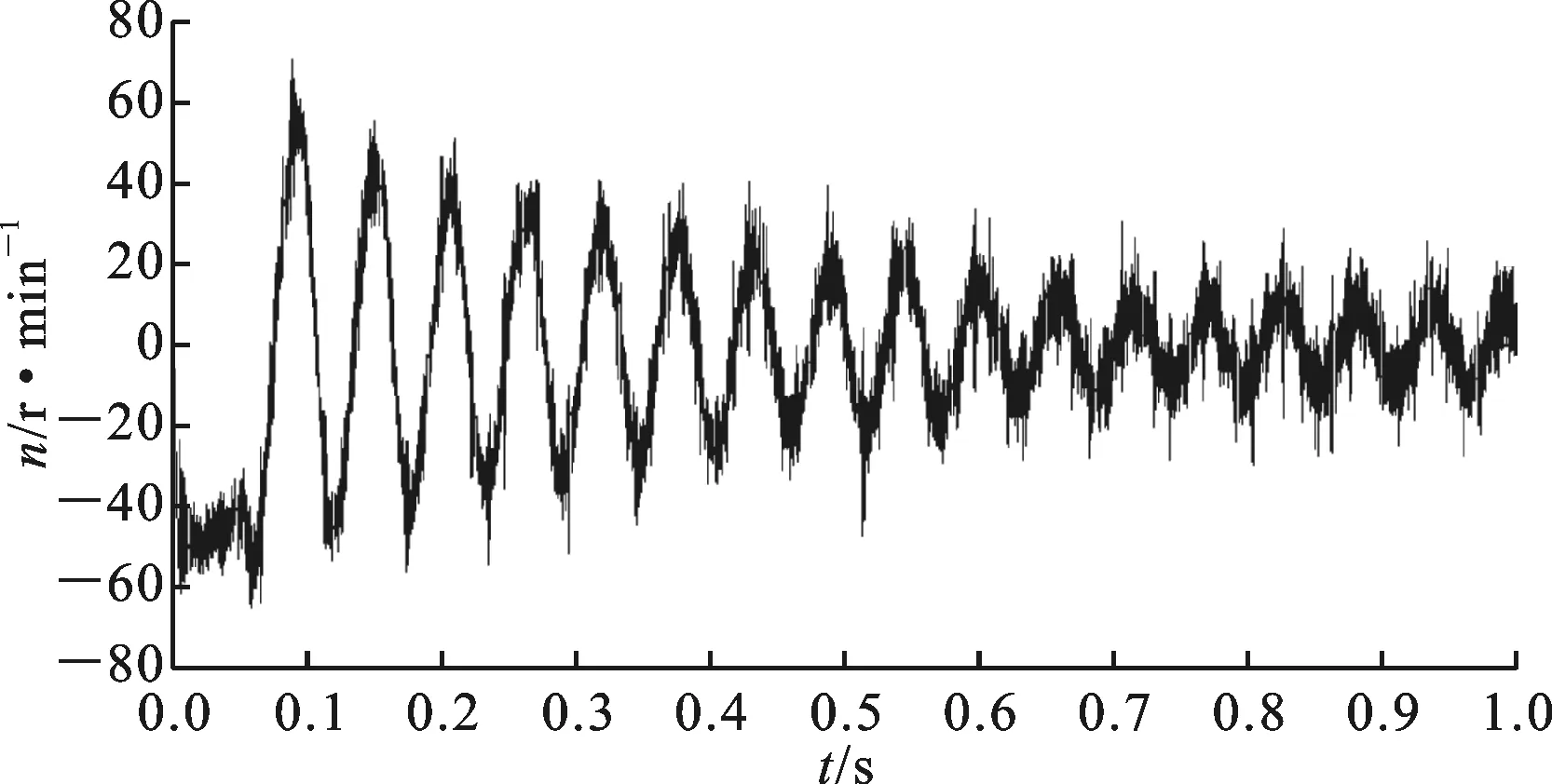
图5 传统滑模观测器的转速估算误差
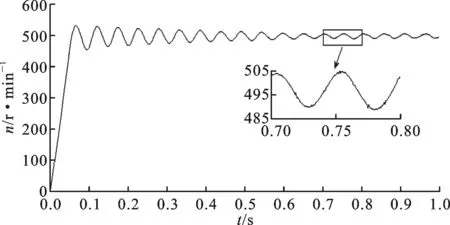
图6 传统滑模观测器的实际转速
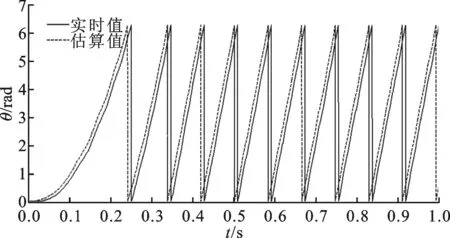
图7 传统滑模观测器的转子位置
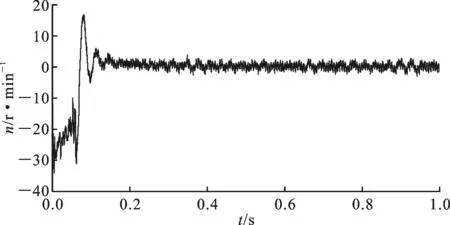
图8 改进型滑模观测器的转速估算误差
在相同的初始条件下,采用改进型滑模观测器的仿真结果如图8~图12所示,转速估算误差最大为±20r/min;转速稳定时,估算误差为±3r/min,与给定转速之间误差为±1r/min。由图10可见,采用改进型滑模观测器的转子位置信息基本无相位滞后和估算误差,估算精度高。如图11、图12所示,改进型滑模观测器定子电阻估算值为0.254Ω左右,误差为±0.004Ω。电感估算值为0.826mH,误差为0.001mH。
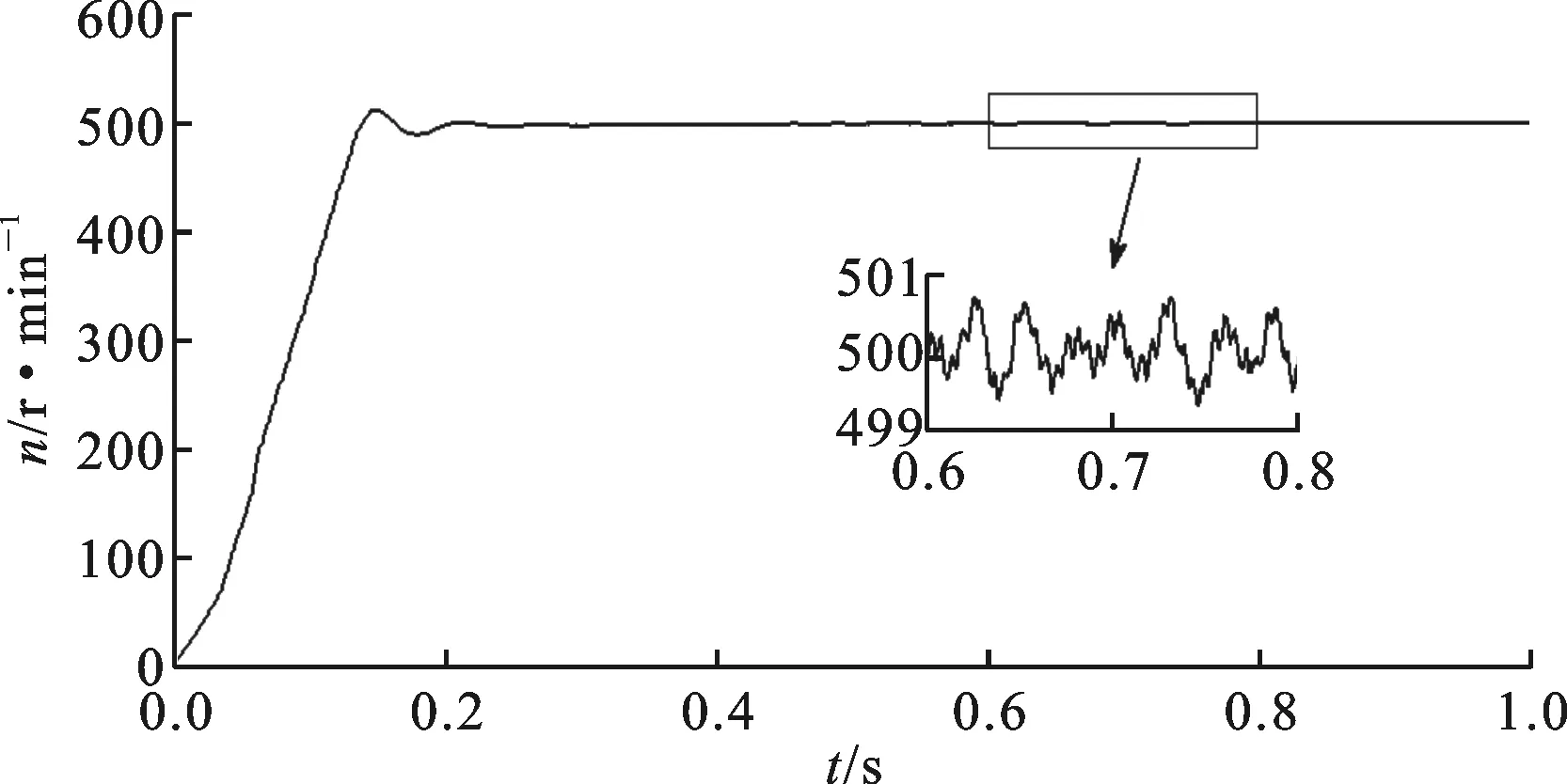
图9 改进型滑模观测器的实际转速
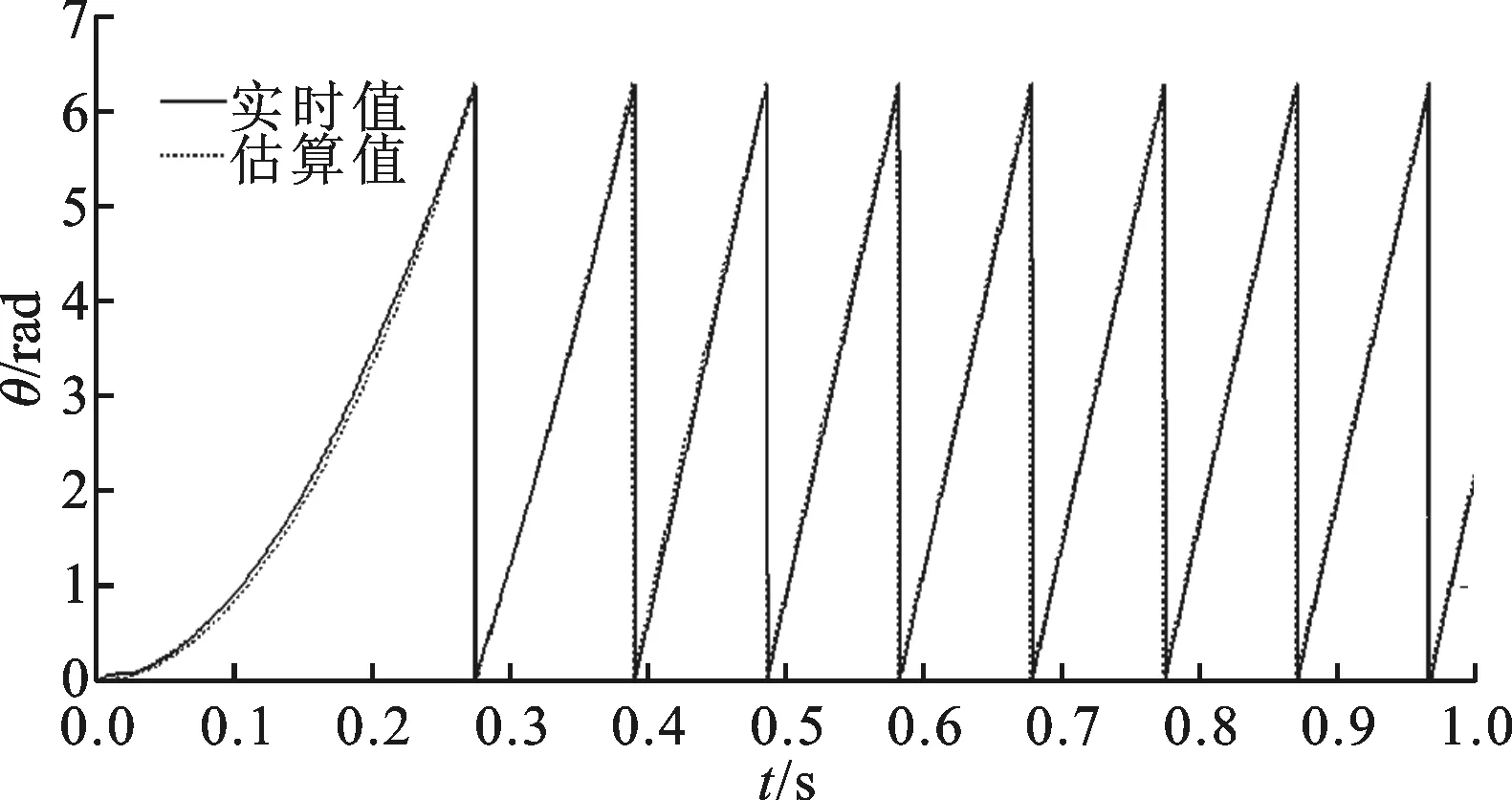
图10 改进型滑模观测器的转子位置
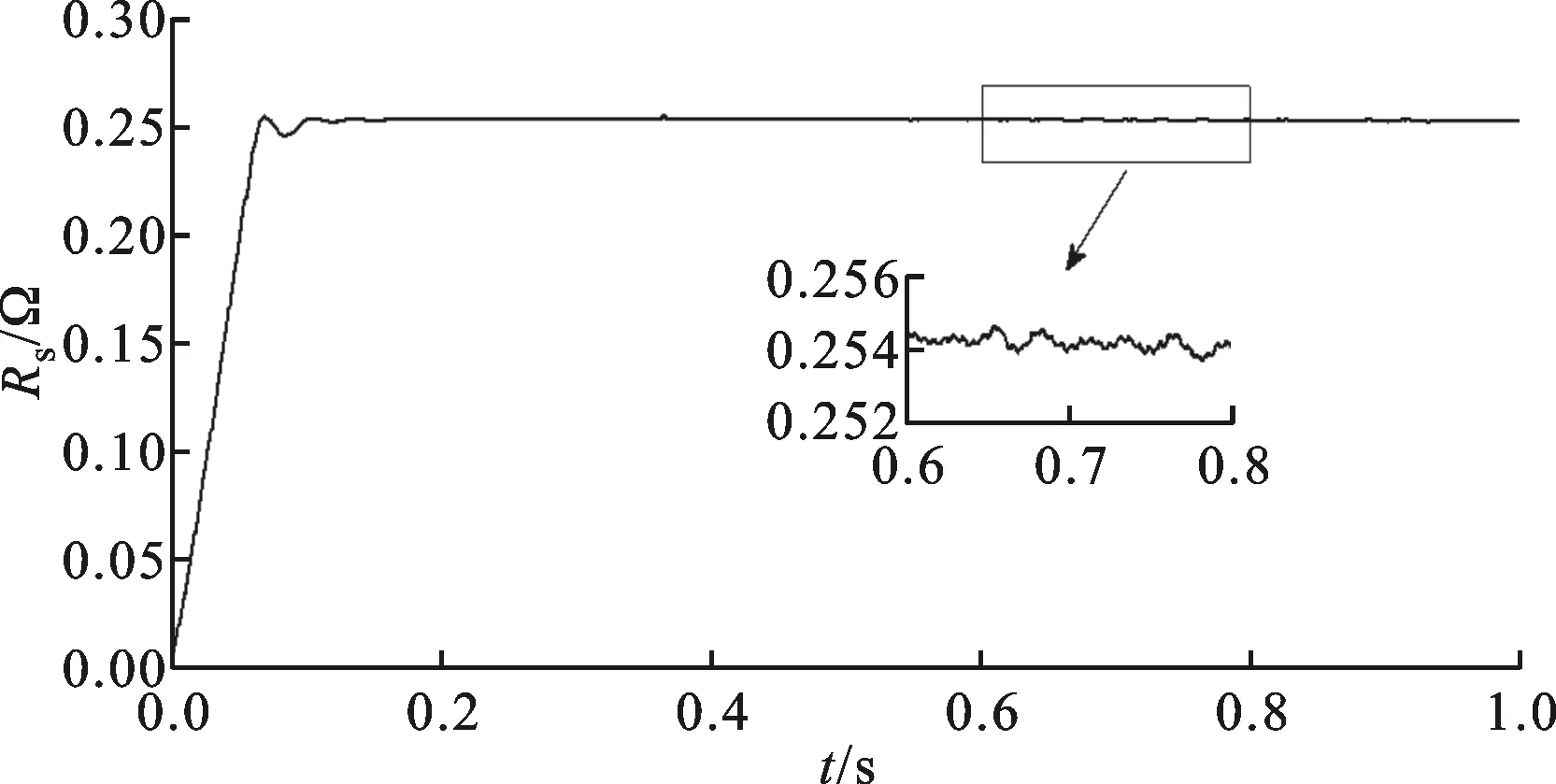
图11 改进型滑模观测器定子电阻参数辨识
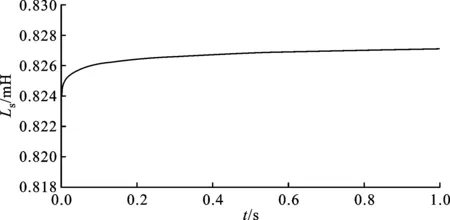
图12 改进型滑模观测器定子电感参数辨识
如图13所示,当定子电阻变为1.5Rs时,定子电阻估算值为0.385~0.388Ω,误差为±0.002Ω。电机稳定运行时,实际转速与给定转速之间的误差为±2r/min。当定子电感变为1.5Ls时,定子电感估算值为1.239mH,误差为0.001mH。电机稳定运行时,实际转速与给定转速之间的误差为±1r/min。如图14~图16所示,当定子电阻和定子电感同时变为1.5Rs和1.5Ls时,定子电阻估算误差值为±0.003Ω,定子电感估算误差值为0.001mH。电机稳定运行时,实际转速与给定转速之间的误差为±1r/min。可见,当系统存在参数摄动时,改进型滑模观测器仍然能够快速、准确地估算电机转子速度和定子电阻、电感参数,使电机正常稳定运行,具有较强的鲁棒性。
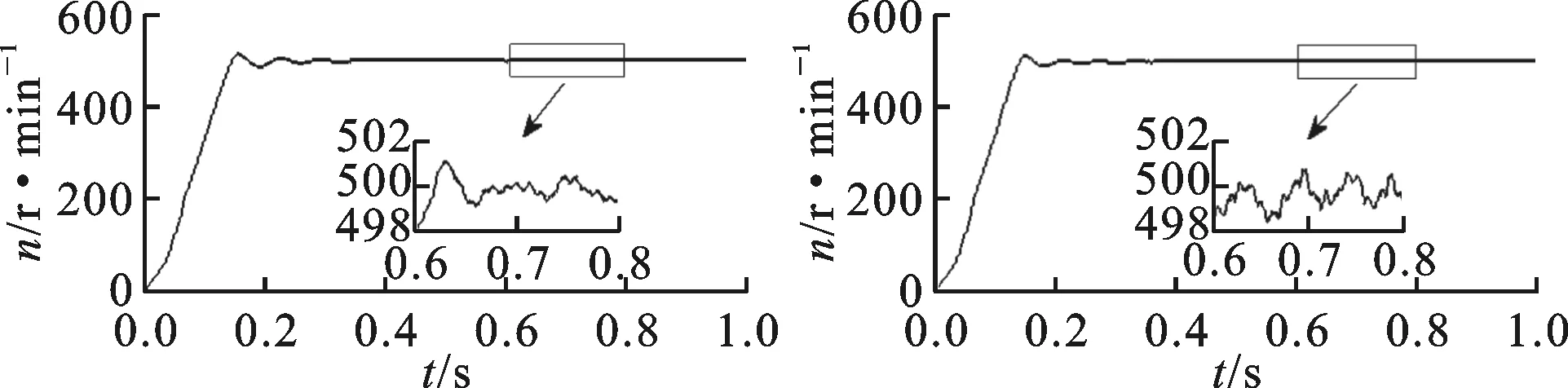
(a)1.5Rs时的电机转速(b)1.5Ls时的电机转速
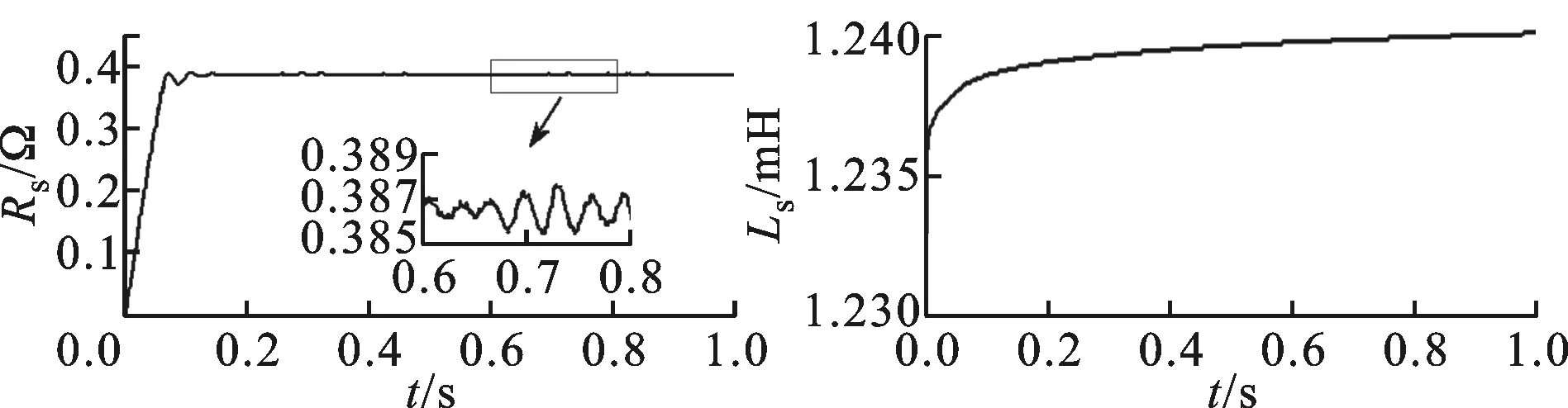
(c)1.5Rs时的电阻估算值 (d)1.5Ls时的电感估算值图13 定子参数单独变化时的电机转速及参数估算值
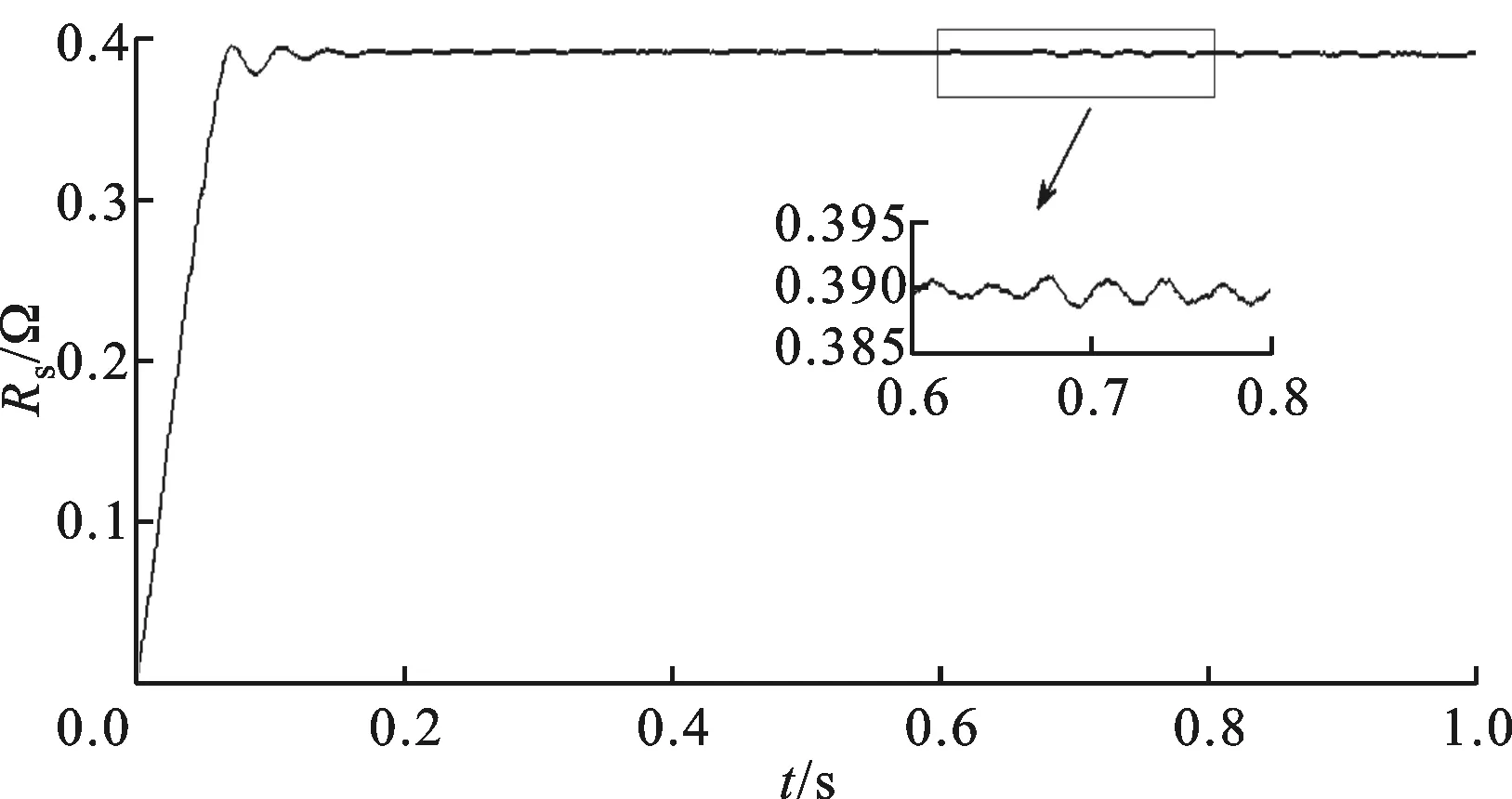
图15 定子电阻1.5Rs、电感1.5Ls时的定子电阻估算值
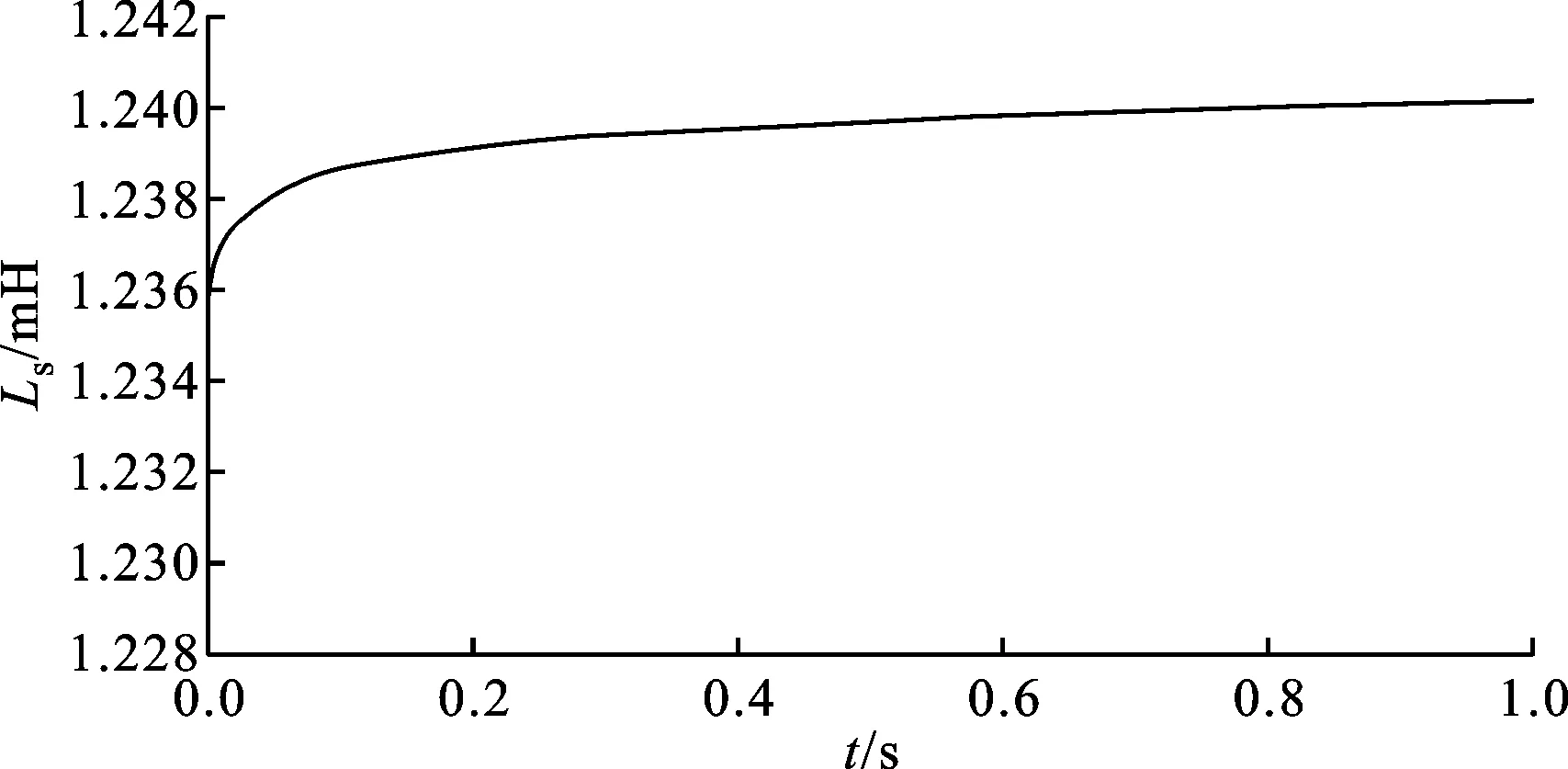
图16 定子电阻1.5Rs、电感1.5Ls时的定子电感估算值
4 结 论
用近似饱和函数代替永磁同步电机滑模观测器中的开关函数,并基于Lyapunov理论推导出定子电阻和电感估算方法,采用锁相环技术获得转子位置与转速的估算值,同时能够在线辨识电机的定子电阻和电感参数。数值仿真结果表明,改进型滑模观测器在不增加观测器模型复杂程度的同时,能够快速准确地在线辨识定子电阻和电感参数,并将其实时反馈到观测器模型中,提高永磁同步电机转子位置和速度的估算精度,且对于参数摄动具有较强的鲁棒性,系统稳定性能好,对于实际运行的永磁同步电机无传感器控制具有重要意义。
[1] 秦峰, 贺益康, 刘毅, 等. 两种高频信号注入法的无传感器运行研究 [J]. 中国电机工程学报, 2005, 25(5): 116-121. QIN Feng, HE Yikang, LIU Yi, et al. Comparative investigation of sensorless control with two high-frequency signal injection schemes [J]. Proceedings of the CSEE, 2005, 25(5): 116-121.
[2] 齐放, 邓智泉, 仇志坚, 等. 基于MRAS的永磁同步电机无速度传感器 [J]. 电工技术学报, 2007, 22(4): 53-58. QI Fang, DENG Zhiquan, QIU Zhijian, et al. Sensorless technology of permanent magnet synchronous motors based on MRAS [J]. Transactions of China Electrotechnical Society, 2007, 22(4): 53-58.
[3] LIAN K Y, CHIANG C H, TU H W. LMI-based sensorless control of permanent magnet synchronous motors [J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2769-2778.
[4] KIM H, SON J, LEE J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM [J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4069-4077.
[5] BARAMBONES O, ALKORTA P. Position control of the induction motor using an adaptive sliding mode controller and observers [J]. IEEE Transactions on Industrial Electronics, 2014, 61(12): 6556-6565.
[6] QIAO Zhaowei, SHI Tingna, WANG Yindong, et al. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor [J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 710-719.
[7] 刘艳莉, 张烨, 吕继考, 等. PMSM改进型滑模观测器无传感器参数辨识 [J]. 电力系统及其自动化学报, 2014, 26(4): 30-34. LIU Yanli, ZHANG Ye, LV Jikao, et al. Sensorless parameters identification of permanent magnet synchronous motor by employing hyperbolic tangent function [J]. Proceedings of the CSU-EPSA, 2014, 26(4): 30-34.
[8] 陆婋泉, 林鹤云, 冯奕, 等. 永磁同步电机无传感器控制的软开关滑模观测器 [J]. 电工技术学报, 2015, 30(2): 106-113. LU Xiaoquan, LIN Heyun, FENG Yi, et al. Soft switching sliding mode observer for PMSM sensorless control [J]. Transactions of China Electrotechnical Society, 2015, 30(2): 106-113.
[9] 丁文, 梁得亮, 罗战强. 两级滤波滑模观测器的永磁同步电机无位置传感器控制 [J]. 电机与控制学报, 2012, 16(11): 1-10. DING Wen, LIANG Deliang, LUO Zhanqiang. Position sensorless control of PMSM using sliding mode observer with two-stage filter [J]. Electric Machines and Control, 2012, 16(11): 1-10.
[10]LIU Ling, LIANG Deliang, LIU Chongxin, et al. Nonlinear state observer design for projective synchronization of fractional-order permanent magnet synchronous motor [J]. International Journal of Modern Physics: B, 2012, 26(30): 1250166-14.
[11]常雪剑, 彭博, 刘凌, 等. 新型非奇异终端滑模观测器的永磁同步电机无传感器控制 [J]. 西安交通大学学报, 2016, 50(1): 85-91. CHANG Xuejian, PENG Bo, LIU Ling, et al. A novel nonsingular terminal sliding mode observer for sensorless control of permanent ,magnet synchronous motor [J]. Journal of Xi’an Jiaotong University, 2016, 50(1): 85-91.
[12]LIU Ling, DING Wen, LIU Chongxin, et al. Hyperchaotic synchronization of fractional-order arbitrary dimensional dynamical systems via modified sliding mode control [J]. Nonlinear Dynamics, 2014, 76(4): 2059-2071.
[13]ZHAO L, HUANG J, LIU H, et al. Second-order sliding-mode observer with online parameter identification for sensorless induction motor drives [J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5280-5289.
[14]常雪剑, 刘凌, 崔荣鑫. 永磁同步电机非奇异快速终端可变边界层滑模控制 [J]. 西安交通大学学报, 2015, 49(6): 53-59. CHANG Xuejian, LIU Ling, CUI Rongxin. A nonsingular fast terminal sliding mode controller with varying boundary layers for permanent magnet synchronous motors [J]. Journal of Xi’an Jiaotong University, 2015, 49(6): 53-59.
(编辑 刘杨)
A Sensorless Permanent Magnet Synchronous Motor Control Strategy for Improved Sliding Mode Observers with Stator Parameters Identification
WANG Hanxiao1,2,LIU Ling2,WU Huawei1
(1. Hubei Key Laboratory of Power System Design and Test for Electrical Vehicle, Xiangyang, Hubei 430056, China;2. School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
An improved sliding mode observer (SMO) with the feature of identifying stator parameters in real time for permanent magnet synchronous motor(PMSM) control is proposed to address the case that the stator resistance and the inductance randomly change when a PMSM is running. An approximate saturation function is used as the switch function in the improved SMO control system to reduce the system chattering. The improved SMO estimates the stator resistance and inductance values by employing Lyapunov stability theorem on the premise of ensuring the stability of the observer and feedbacks them to the PMSM model to improve the estimation accuracy of rotor’s position and velocity. The rotor’s position and velocity information are estimated from the back electromotive force based on the principle of phase-locked loop. Simulation results show that the improved SMO quickly and accurately tracks the position and the velocity of a rotor, and has an attractive dynamic performance by estimating the resistance and inductance of the stator in real time and correcting the PMSM model.
permanent magnet synchronous motor; sliding mode control; sensorless control; approximate saturation function; parameters estimation
2016-01-20。 作者简介:王悍枭(1992—),男,硕士生;刘凌(通信作者),男,副教授,硕士生导师。 基金项目:国家自然科学基金资助项目(51307130);中央高校基本科研业务费专项资金资助项目;纯电动汽车动力系统设计与测试湖北省重点实验室开放基金资助项目(HBUASEV2015F002)。
时间:2016-04-03
10.7652/xjtuxb201606016
TM301
A
0253-987X(2016)06-0104-06
网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20160403.1819.002.html
