利用分形理论的3T1R混联机构型综合
2016-12-23葛姝翌曹毅丁泽华刘凯丁锐
葛姝翌,曹毅,丁泽华,刘凯,丁锐
(1.江南大学机械工程学院,214122,江苏无锡;2.上海交通大学系统控制与信息处理教育部重点实验室,200240,上海;3.上海交通大学机械系统与振动国家重点实验室,200240,上海;4.江南大学江苏省食品先进制造装备技术重点实验室,214122,江苏无锡)
利用分形理论的3T1R混联机构型综合
葛姝翌1,4,曹毅1,2,3,4,丁泽华1,4,刘凯1,4,丁锐1,4
(1.江南大学机械工程学院,214122,江苏无锡;2.上海交通大学系统控制与信息处理教育部重点实验室,200240,上海;3.上海交通大学机械系统与振动国家重点实验室,200240,上海;4.江南大学江苏省食品先进制造装备技术重点实验室,214122,江苏无锡)
为综合得到三移动一转动(3T1R)混联机构,利用分形理论和机构拓扑图,提出了一种全新有效的混联机构型综合方法,主要思想是将混联构型转化为连杆机构,机构拓扑图作为连杆机构的主体,运动副作为杆件的组成元素。根据分形理论,对机构拓扑图进行有序分形,并通过输出位移子集的排列组合和适配运动副,实现了混联机构构型的多样化。提出了可用于求解复杂机构拓扑图的多路径输出的路径法则,并且规定了用于推导运动副位移子集的串并联计算方法。根据机构拓扑图和分形方式,将混联机构按有、无横向支链分为2种类型。建立了分形与混联机构的关系模型,在数理逻辑关系上使机构设计与分形理论得到了统一。采用Matlab编程的形式综合出了3T1R四自由度混联机构,实现了其中一个混联机构的构型设计,并验证了构型设计方法的正确性。
混联机构;构型综合;分形理论;三移动一转动
混联机器人由于其兼具串联机器人工作空间大、易于控制和并联机器人结构稳定、刚性好、累积误差小、动态性能好、精度高的优点,并能避免单纯串、并联机器人所带来的问题,从而得到了国内外的广泛关注,成为机构学研究的一个重要方向。目前主要有4种机构型综合研究方法,即:基于螺旋理论的约束综合法[1-3];基于李代数的型综合方法[4-5];基于自由度的列举综合方法[6];运动综合方法[7]。许多学者在混联机构的构型理论方面做了大量有意义的工作[8-15],得到了许多新型混联机构。不难发现,以上混联机构的型综合主要关注于支链的设计方法,但支链的布局较为单一,比较适用于纵向多支链开环机构。
然而,上述理论一般不适用于具有多路径横向非典型性的混联机构的构型设计和型综合。机构拓扑创新是机械发明最具挑战性和发明性的核心内容,因此对于混联机构,尤其是具有多路径横向非典型性的混联机构构型设计和综合方法的研究,不仅具有重要的理论意义,还具有广泛的应用前景。
本文基于分形理论和机构拓扑图,提出了一种系统、简洁的混联机器人构型综合理论和设计方法,通过建立混联机构与分形的关系模型并归纳出混联机构构型综合的具体步骤,综合出了具有三移动一转动(3T1R)运动特征的混联机构,最后通过实例验证了其可行性。
1 分形理论和机构拓扑图
1.1 分形理论的基本概念
美国数学家Mandelbrot首次提出了分形几何理论[16]。分形有2个定义:①如果一个集合在欧式空间中的豪斯多夫分形维数D严格大于其拓扑维数DT,则该集合为分形集,简称为分形;②组成部分以某种方式与整体相似的形体称为分形。
分形理论定义中的2个变量D和DT的含义是:它们都对欧氏空间中的每一个集合R赋予一个实数,且将此实数定义为该集合的维数,其中DT是较为直观的拓扑维数。2个维数无需相等,其中DT必须是整数,它们需要满足Szpilrajn不等式
D≥DT
(1)
将分形理论应用于机械领域,可发挥其简单客观分析事物的优势,不仅能够直观地表示机构性能,同时也可以简化工程问题,减少工作量。
1.2 机构拓扑图
机构拓扑图由静平台、动平台和支链构成。静平台即为机架,动平台为机构末端输出平台,支链由运动副组建而成。
机构拓扑图是混联机构的主体构造,其中心思想是:①将混联机构简化为连杆机构;②确定机构的拓扑布局;③进行路径与支链的结构设计,从而实现混联机构的整体构型设计。
为快速有效地生成不同的机构拓扑图,将分形理论引入到机构拓扑图中,衍生出链分形、平台分形、链台分形3种分形方式[17],如图1所示。
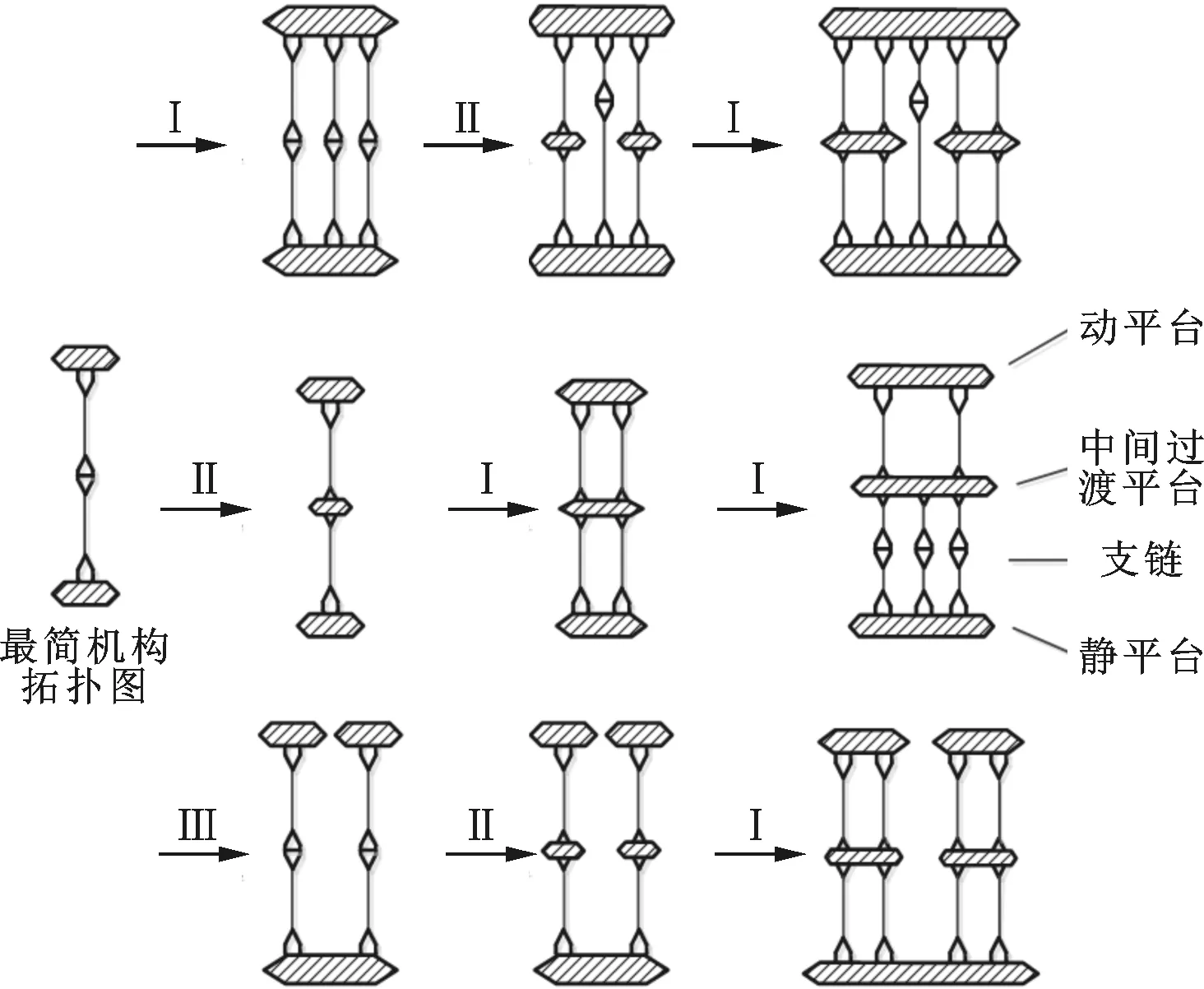
Ⅰ:链分形;Ⅱ:平台分形;Ⅲ:链台分形图1 机构拓扑图分形途径
1.3 分形方式的具体分析
1.3.1 链分形的定义 如果通过1个或多个运动副连接2个平台,则称该运动副的组合为支链。链分形是对支链进行的分形(如图1中Ⅰ所示),可以细分为纵向链分形和横向链分形。
1.3.2 平台分形的定义 平台分形(如图1中Ⅱ所示)是在已有支链的基础上添加过渡平台。需注意,拓扑机构必须在已有支链的位置进行平台分形。
1.3.3 链台分形的定义 链台分形(如图1中Ⅲ所示)是指在任意平台上同时分形出1个支链和1个输出动平台的分形方式,新生成的输出动平台不与机构的输出动平台有任何联动关系,即该拓扑机构具有多输出动平台。
必须指出,链分形和平台分形输出的拓扑结构是闭环输出结构,即输出平台有且仅有1个,而链台分形输出的拓扑结构是开环输出结构,即输出动平台数量大于1,适合多点协同工作环境。本文主要考虑前者,因此,链台分形未在文中进行详细描述。
2 机构的运动特征和运算法则的描述
从机构拓扑图转化为混联机构构型的过程是:第一步,由机构拓扑图分析得到拓扑路径;第二步,由拓扑路径分解得到机构支链;最后,通过已知支链末端输出特征适配运动副。
2.1 路径及路径法则
2.1.1 路径的概念 由上述3个步骤可知,路径是混联机构构型设计的核心元件,故而路径的设计及运算法则具有重要意义。
按照一定的排列方式,路径由连接各个平台的支链组合而成,其中路径始于静平台,终于动平台。每条路径所含支链间的关系定义为串联关系,各路径之间定义为并联关系。通过此番定义,即可将动平台的输出位移子集转化为各个支链来进行交集和并集的计算
(2)
式中:Bij为第j条路径中第i个支链末端的输出位移子集;Rj为路径的输出位移子集;P为机构末端动平台的输出位移子集;I为第j条路径的支链总数;J为路径总数;#为串联运算符,&为并联运算符,其具体运算将在第2.2.2小节中进一步描述。需要补充的是,当机构拓扑图中存在公用平台或横向支链时,同一支链可以作为不同路径的组成元素。
2.1.2 路径法则 在机构动平台末端输出位移子集已知的情况下,基于机构拓扑图得到全部符合要求的路径及其支链配置的过程称为路径法则。由于情况复杂,故细分为以下2种情况进行说明。
(1)一般机构拓扑图。如果机构拓扑图中存在公用平台,则支链可以被重复利用从而组建不同的路径,如图2所示。
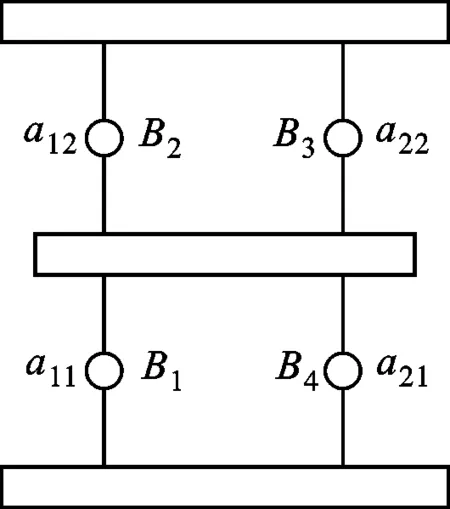
图2 一般机构拓扑图
通用路径总数的计算公式为
(3)
式中:n为公共平台数量;ai1为在第i公共平台中位于下位的支链的数量;ai2为在第i公共平台中位于上位的支链的数量。
(2)存在横向支链的机构拓扑图。对于图3所示的机构拓扑图,不难发现各路径中存在公用支链的状况,其复杂程度远远高于第一种情况。
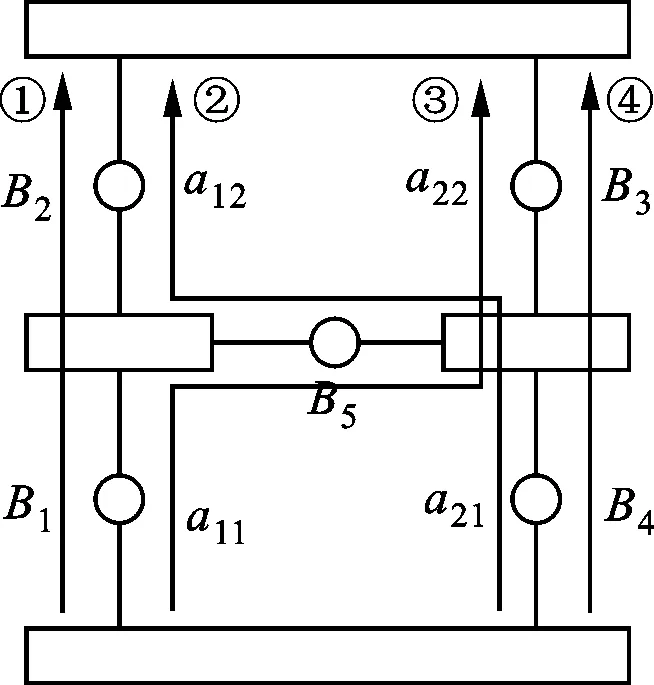
图3 存在横向支链的拓扑图
由图3可知,从静平台到动平台共有4条路径,分别是B1B2、B1B5B3、B3B4、B4B5B2,则路径的数量为
J=(a11a12)+(a11a22)+(a12a21)+(a12a22)
(4)
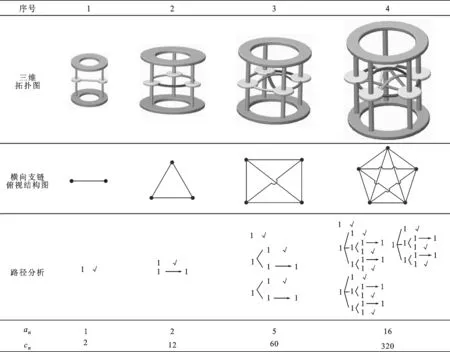
图3是存在横向支链的机构拓扑图中最简单的一种形式,即只存在一个横向链分形,且机构满足设计要求。若进行多次横向链分形,且每2个过渡平台都能相互连接,将是横向链分形最复杂的情况,同时也是运用路径法则判断的最复杂的情况。逐一分析每个机构拓扑图,形成表1,并可从表1中归纳出路径数量。
由于机构拓扑图路径情况复杂,因此添加2个变量用于推导路径。
(1)点到点的路径数量an,是指由某一过渡平台出发到达另一过渡平台所经过的路径的数量。由表1可以得出an的关系式
(5)
(2)累计增加路径数量cn,是指与将机构拓扑中的横向支链去除后的机构拓扑图的路径数量相对比所增加的路径数量。可以推导出
cn=n(n+1)an
(6)
通过分析可知,复杂机构拓扑图的路径求解过程可以分为2部分:①求解去除横向支链剩下的一般机构拓扑图的路径数量;②求解与一般拓扑图相对比所增加的路径数量,即累计增加路径数量cn。两者相加即可得到带横向支链的机构拓扑图的路径数量。
表1 横向支链路径法则归纳
2.2 支链及串并联计算法则
2.2.1 支链与分形的关联 平台分形和支链间存在密不可分的关系,主要体现在:机构拓扑图的重要组成部分之一就是支链;链分形也是分形过程中的基础分形方式之一。具体关系如图4所示。

图4 平台分形与支链的关系
图4中的链分形情况较复杂,由横向链分形和纵向链分形构成。支链及路径与链分形的关系如图5所示。

图5 链分形与支链的关系
2.2.2 串并联计算法则 从构型的角度,机构由路径并联而成,路径由支链串联而成;从数理逻辑的角度,各路径输出位移子集求交集生成机构末端输出位移子集,各支链的输出位移子集求并集生成对应支链的输出位移子集。为定义串并联计算法则,引入2个新的运算符号——串联运算符号#和并联运算符号&,并给出运算规则式(7)。由于运动副方位关系中存在非正则关系,故在计算中不引入方位关系。
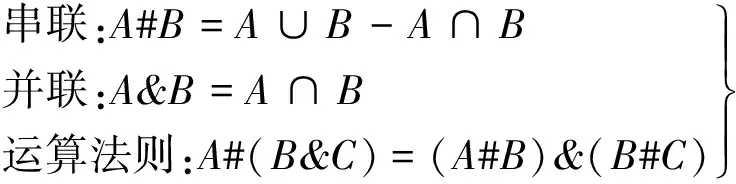
(7)
式中:A、B为输出位移子集;∪为求并运算符;∩为求交运算符。
2.3 运动副的表达
运动副是组成支链的基本元素,因此运动副的描述对于混联机构设计具有重要意义。本文提出8位二进制码的表达方式,不仅可使运动副的表达方式简单明了,并且能清楚地描述运动副的种类及其与基坐标轴的位置关系、相邻运动副轴线的方位关系以及平台和支链间的连接关系。同时,由于采用二进制代码的表达方式,所以后续可以进行数字化设计。
2.3.1 运动副的表达形式 依据运动副的类别和位置关系,单一运动副选用8位有效二进制代码中的5位进行表达,具体如表2所示。

表2 单一运动副的二进制表示方法
单一运动副划分为6种情况,如图6所示。
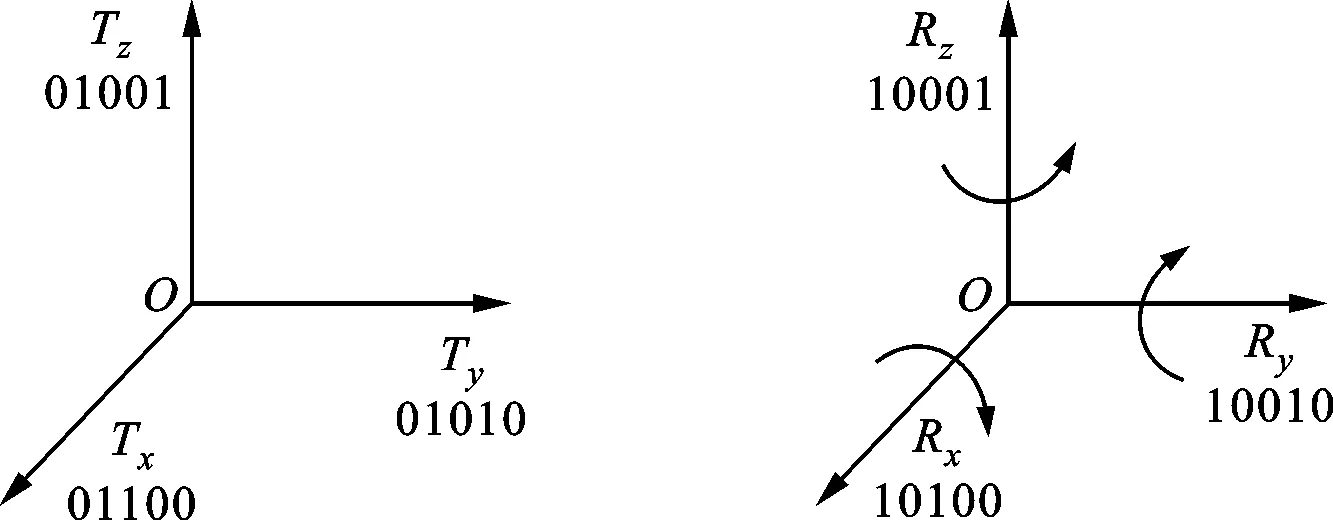
图6 运动副的描述
表2可划分为前、后2部分,表征不同的含义。
(1)P0.4和P0.3为运动副类别位,若P0.3=1,表示运动副为移动副,若P0.4=1,则表示运动副为转动副,但二者不能同时为1。
(2)P0.2、P0.1和P0.0分别为运动副轴线的方向位,方向位的矢量方向与基坐标轴方向一致。例如,若P0.0=1,则表示运动副的轴线与基坐标的z轴平行。P0.1、P0.2可依此类推,且方向位最多只能有1位为1。
2.3.2 相邻运动副间轴线的方位关系 单一运动副中的方向位只能表示相邻运动副间轴线的部分方位关系。为全面表征各运动副之间的方位关系,本文补充3位二进制码以进一步描述相邻运动副间的方位关系,见表3。

表3 运动副方位关系的表达方法
因此,代表单一运动副的5位二进制代码和代表相邻运动副方位关系的3位二进制代码,合成了运动副8位二进制代码的表达方式。需要指出的是,大多数方位关系均具有传递性,例如平行、同轴等。具有传递性的方位关系为正则方位关系,其余为非正则方位关系[18]。
3 3T1R混联机构的构型综合
3.1 混联机构构型综合依据
基于机构的拓扑结构来适配运动副并判定适配运动副的布局是否符合设计要求的过程,称为混联机构的构型设计。根据机构拓扑图和分形类别,混联机构可划分成2类:第一类混联机构的机构拓扑图中存在横向支链,如图7所示;第二类混联机构的机构拓扑图无横向支链,如图8所示。

图7 第一类混联机构 图8 第二类混联机构
从集合的角度来分析,混联机构是通过路径按照一定的准则并联而成的,路径的组成元素是支链;支链是由运动副通过自由度分配合成的,其组成关系依据式(2),运算法则依据式(7)。
式(2)表明:混联机构的构型综合是对于选定的拓扑机构依据串并联计算法则,首先确定路径,其次确定支链,最后选取运动副,并判定其正确性的过程。
由上述分析可知,混联机构以机构拓扑图为基础,而机构拓扑图的构造以分形理论为核心。当机构拓扑图确定之后,路径、支链亦随之确定,再根据机构输出位移子集确定运动副的自由度分配。根据上述关联内容,建立如下分形与混联机构的关系模型
(8)
式中:Fdof为机构自由度数;Bi为第i个支链上的驱动运动副数(i=1,2,…,aa);N为分形次数;ap为被动支链数;aa为主动支链数;L为链分形次数;P为平台分形次数;Pmin为最短支链的平台分形次数。
基于分形理论的混联机构构型方法的特点是:
(1)以最短路径为中心对机构拓扑图进行展开,其他路径是最短路径输出位移子集的父集,因此不存在瞬时性;
(2)由于机构拓扑图是混联机构构型设计的基础,而拓扑图可以通过分形理论实现其多样性,因此该构型设计方法可以实现混联机构设计的多样化;
(3)可实现支链的替代化设计,通过单元代换原理,将满足条件的机构代入到支链中,完成支链所要求的期望动作,但需注意所代入的机构中包含的支链数小于所设计的混联机构的支链数。
3.2 混联机构构型综合步骤
根据上述设计方法,得到如下混联机构构型综合步骤:
(1)根据给定的机构末端输出位移子集,确定最简拓扑图的链分形、平台分形的次数,并绘制机构拓扑图;
(2)运用路径法则分析该机构拓扑图的输出位移子集计算公式和路径数量,并确定最短路径所在的位置;
(3)根据步骤(2)中的计算公式,并参考各支链的串并联关系,采用Matlab编程或者列举的方式获得满足条件的路径自由度和支链的输出位移子集,完成适配运动副的过程;
(4)通过式(7)计算上述支链、路径的输出位移子集,得出机构末端的输出位移子集,并与预计输出位移子集进行对比,如果一致,则证明该设计方法可行;
(5)获得混联机构构型,绘制三维图像。
为了更加清晰直观地表现具体的构型综合设计步骤,绘制了流程图,见图9。
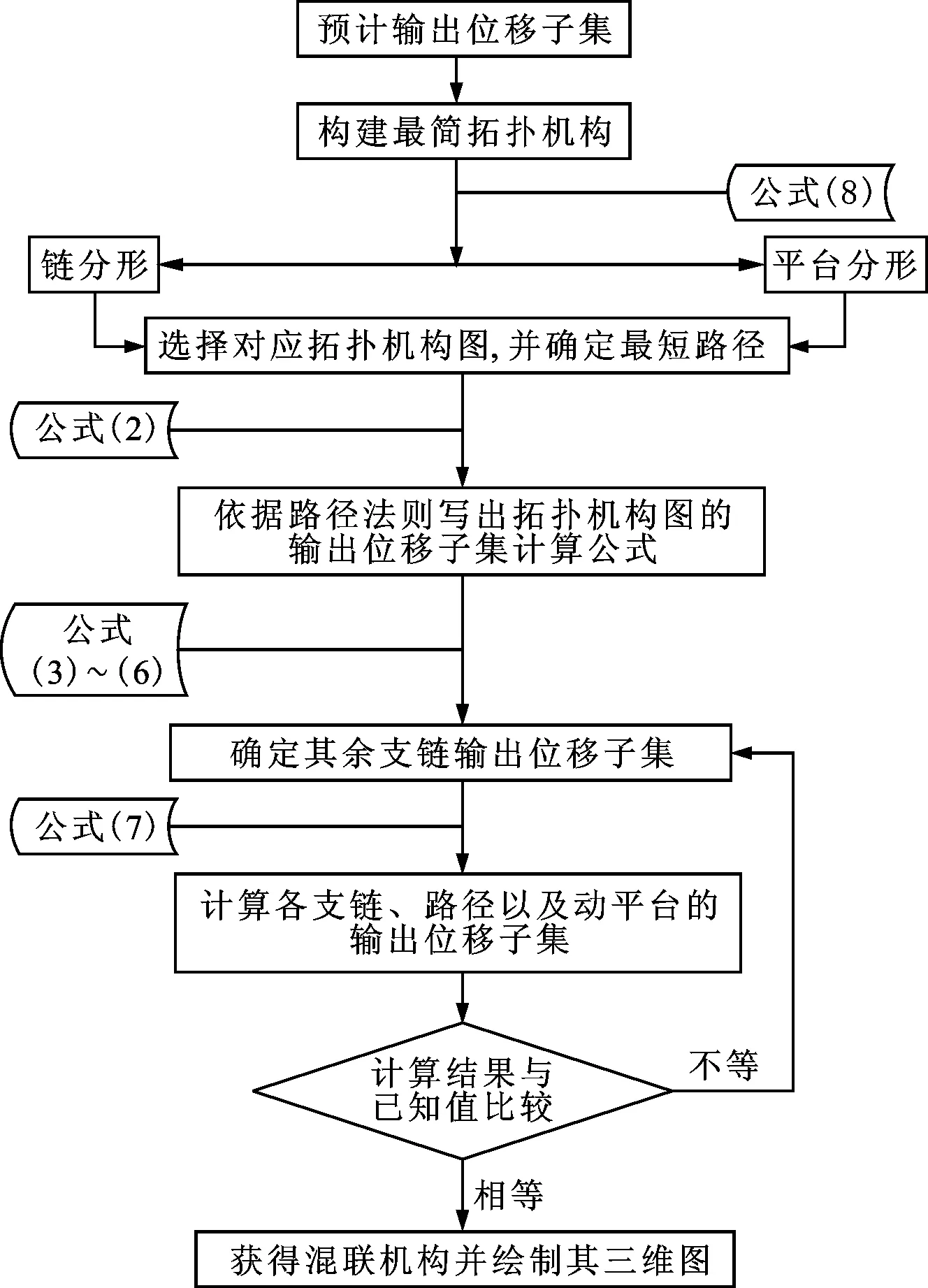
图9 混联机构构型综合流程图
3.3 3T1R混联机构的构型综合
由于分形可以得到大量机构拓扑图,因此本文的构型综合针对的是以已选定的拓扑机构图为基础的混联机构的构型综合,如图10所示。

图10 选定机构拓扑图
基于3.1和3.2节中的综合方法和步骤,对3T1R混联机构进行构型综合。通过路径法则式(2)的分析,可知路径共有4条
{B1B2,B1B3,B3B4,B2B4}
(9)
取B1B2为最短路径,定义B1支链的输出位移子集为T(U)T(V)T(W),B2支链的输出位移子集为R(U)。对其他路径的自由度进行分析,可知除最短路径以外的路径的特征集合为具有3T1R特征或者3T1R父集特征的集合
{3T1R,3T2R,3T3R}
(10)
对式(10)进行排列组合,并挑选符合构型条件的组合,可得到除最短路径之外所有路径的组成形式。由于路径可以共用同一支链且支链B1B2的各自输出已知,因此只需研究支链B3B4的输出即可。
一般选取最短路径上的支链作为安装驱动的位置,即B1B2为主动支链,剩余支链为被动支链。为简化表达,令路径B1B2为E、B1B3为F、B3B4为G、B2B4为H,要求各支链满足
(11)
依据式(11)求解支链B3、B4的输出位移子集工作量较大,故采取Matlab编程的方法获得较全面的结果。设计的程序如下:
1.clc;
2.clear all;
3.B1=[TxTyTz];
4.B2=[Rx];
5.A2=setdiff(E,B1);
6.A4=setdiff(F,B2);
7.a=length(Bi);
8.fori=0:a
9.S=nchoosek(B1,i);
10. [m1,n1]=size(S);
11. forj=1:m1
12.A1=S(j,:);
13.B3=union(A1,A2)
14.b=length(B2);
15. fork=0:b
16.S1=nchoosek(B2,k);
17. [m2,n2]=size(S1);
18. forl=1:m2
19.A5=S1(l,:);
20.B4=union(A5,A4)
21. end
22. end
23. end
24. end
从运算结果中随机选取一组数据,即可得到所有支链的输出位移子集,再按照图11的机构拓扑简图构造出输出为3T1R的混联机构构型。
值得注意的是,虽然上述构型综合方法针对的是图10中的机构拓扑图,但是本文提出的混联机构构型综合方法同样适用于其他自由度的混联机构构型综合。
4 机构构型验证及分析
4.1 混联机构末端运动输出分析方法
为验证上述综合出的3T1R四自由度混联机构的正确性,在此提出一种混联机构末端运动输出分析方法,其基本步骤是:
(1)分析混联机构的构型,将其抽象为机构拓扑图和支链的叠加体;
(2)将支链拆分为运动副,并基于2.3节中的内容,将运动副转换为二进制代码的表现形式;
(3)运用式(7)对支链中的运动副以串联运算方式推导出各支链的输出位移子集;
(4)运用路径法则分析步骤(2)中所得的机构拓扑图,得到各路径分支,并在此基础上通过数理逻辑关系得到各路径的输出位移子集;
(5)通过路径的并联运算方式得到混联机构动平台的输出位移子集,即整个混联机构的末端运动特征。
4.2 机构自由度分析
从式(11)所得的结果中选取一组数据做进一步设计,从而得到该混联机构各支链的输出位移子集,如表4所示。
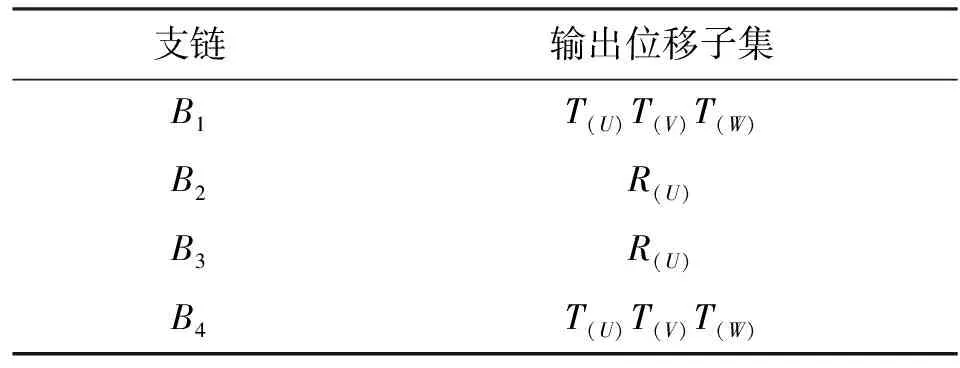
表4 支链的输出位移子集
根据选择的机构拓扑图和适配的运动副绘制混联机构,如图11所示。

图11 输出3T1R的混联机构
为确保图11所示混联机构输出结果的正确性,需进行验证,即核算各支链的输出位移子集,并求取机构末端输出位移子集与预期结果进行对比。计算过程如下
B1=B4=T(U)T(Y)T(W)=

(12)
(13)
由式(7)和式(12)、式(13),可推导出各路径的输出位移子集
B1#B2=B1#B3=B4#B2=B4#B3=
R(V)T(U)T(W)#R(U)=

(14)
由式(14)可得机构末端动平台的输出位移子集
P=(B1#B2)&(B1#B3)&(B2#B4)&

R(U)T(U)T(V)T(W)
综上所述,动平台的输出位移子集与B1B2路径的输出位移子集相同,并与已知输出相同,表明设计所得机构的输出结果正确,从而验证了上述混联机构构型设计方法的正确性。
5 结 论
为综合得到3T1R混联机构,基于分形理论和机构拓扑图,提出了一种混联机构构型综合方法,主要思想是:将混联构型转化为连杆机构,将机构拓扑图作为连杆机构的主体,并将运动副作为杆件的组成元素。
(1)根据分形理论对机构拓扑图进行有序分形,并通过输出位移子集的排列组合和适配运动副,从而实现了混联机构构型的多样化。
(2)提出了可用于求解复杂机构拓扑图的多路径输出的路径法则,并给出了用于推导运动副位移子集的串并联计算方法。
(3)根据机构拓扑图和分形方式,将混联机构分为2类。建立分形与混联机构的关系模型,在数理逻辑关系上使机构设计与分形理论得到了统一。
(4)采用Matlab编程的形式综合出了3T1R四自由度混联机构,实现了其中一种混联机构的构型设计,并验证了构型设计方法的正确性。
[1] KONG Xianwen, GOSSELIN C M. Type synthesis of 3T1R 4-DoF parallel manipulators based on screw theory [J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 181-190.
[2] 赵铁石, 黄真. 一种新型四自由度并联平台机构及其位置分析 [J]. 机械科学与技术, 2000, 19(6): 927-929. ZHAO Tieshi, HUANG Zhen. A novel spatial four-DOF parallel mechanism and its position analysis [J]. Mechanical Science and Technology, 2000, 19(6): 927-929.
[3] FANG H, FANG Y, GUO S. Structure synthesis of 4-DOF parallel robot mechanisms based on screw theory [J]. Chinese Journal of Mechanical Engineering, 2004, 17(4): 486-489.
[4] HERVE J M. The Lie group of rigid body displacements, a fundamental tool for mechanism design [J]. Mechanism and Machine Theory, 1999, 34(5): 719-730.
[5] MENG J, LIU G, LI Z. A geometric theory for analysis and synthesis of sub-6 DoF parallel manipulators [J]. IEEE Transactions on Robotics, 2007, 23(4): 625-649.
[6] SIMONI R, CARBONI A P, MARTINS D. Enumeration of parallel manipulators [J]. Robotica, 2009, 27(3): 589-597.
[7] 杨廷力, 金琼, 刘安心, 等. 基于单开链单元的三平移并联机器人机构型综合及其分类 [J]. 机械工程学报, 2002, 38(8): 31-37. YANG Yanli, JIN Qiong, LIU Anxin, et al. Structural synthesis and classification of the 3DOF translational parallel robot mechanisms based on the units of single-opened-chain [J]. Journal of Mechanical Engineering, 2002, 38(8): 31-37.
[8] 郭盛, 方跃法. 可实现空间取放作业的4自由度并联机器人机构综合 [J]. 机器人, 2007, 29(5): 417-422. GUO Sheng, FANG Yuefa. Structural synthesis for 4-DOF parallel manipulators with spatial taking and putting functions [J]. Robot, 2007, 29(05): 417-422.
[9] SHEN Huiping, YANG Tingli, MA Lvzhong. Synthesis and structure analysis of kinematic structures of 6-DoF parallel robotic mechanisms [J]. Mechanism and Machine Theory, 2005, 40(10): 1164-1180.
[10]沈惠平, 赵海彬, 邓嘉鸣, 等. 基于自由度分配和方位特征集的混联机器人机型设计方法及应用 [J]. 机械工程学报, 2011, 47(23): 56-64. SHEN Huiping, ZHAO Haibin, DENG Jiaming, et al. Type design method and the application for hybrid robot based on freedom distribution and position and orientation characteristic set [J]. Journal of Mechanical Engineering, 2011, 47(23): 56-64.
[11]GAO Feng, LI Wei-min, ZHAO Xian-chao, et al. New kinematic structures for 2-, 3-, 4-, and 5-DOF parallel manipulator designs [J]. Mechanism and Machine Theory, 2002, 37(11): 1395-1411.
[12]GAO Feng, PENG Bin-bin, LI Wei-min, et al. Design of a novel 5DOF parallel kinematic machine tool based on workspace [J]. Robotica, 2005, 23(1): 35-43.
[13]KONG X, GOSSELIN C M. Type synthesis of 3DoF spherical parallel manipulators based on screw theory [J]. Journal of Mechanical Design, 2004, 126(1): 523-531.
[14]KONG X, GOSSELIN C M. Type synthesis of 3-DoF translational parallel manipulators based on screw theory [J]. Journal of Mechanical Design, 2004, 126(1): 83-92.
[15]KONG X, GOSSELIN C M. Type synthesis of 5-DoF parallel manipulators based on screw theory [J]. Journal of Robotic Systems, 2005, 22(10): 535-547.
[16]MANDELBROT B. How long is the coast of Britain? statistical self-similarity and fractional dimension [J]. Science, 1967, 155(3775): 636-638.
[17]曾强. 具有串并混联形式与变自由度特性的空间多环机构的拓扑设计方法 [D]. 北京: 北京交通大学, 2012.
[18]廖明, 刘安心, 沈惠平, 等. 面向计算机辅助分析的并联机构符号描述方法 [J]. 农业机械学报, 2015, 46(7): 310-317. LIAO Ming, LIU Anxin, SHEN Huiping, et al. Symbolic description of parallel mechanism for computer aided analysis [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 310-317.
[本刊相关文献链接]
周奇才,吴青龙,熊肖磊,等.桁架结构拓扑及截面尺寸优化设计方法.2016,50(9):1-9.[doi:10.7652/xjtuxb201609001]
孟凡刚,巫世晶,贾俊峰,等.考虑间隙的弹塑性断路器弹簧操动机构动力学特性研究.2016,50(7):75-82.[doi:10.7652/xjtuxb201607012]
秦友蕾,曹毅,陈海,等.两移动三转动完全解耦混联机器人机构型综合.2016,50(1):92-100.[doi:10.7652/xjtuxb2016 01015]
王安麟,孟庆华,李文嘉,等.液力变矩器机构变量交互作用研究.2015,49(9):1-7.[doi:10.7652/xjtuxb201509001]
杨德伟,冯祖仁,张翔.新型三臂巡线机器人机构设计及运动分析.2012,46(9):43-48.[doi:10.7652/xjtuxb201209009]
谢嘉,赵升吨,梁锦涛,等.压力机杆系优化求解的变量循序组合响应面法.2012,46(5):57-62.[doi:10.7652/xjtuxb2012 05010]
(编辑 葛赵青)
Type Synthesis of 3T1R Hybrid Mechanisms Based on Fractal Theory
GE Shuyi1,4,CAO Yi1,2,3,4,DING Zehua1,4,LIU Kai1,4,DING Rui1,4
(1. School of Mechanical Engineering, Jiangnan University, Wuxi, Jiangsu 214122, China; 2. Key Laboratory of System Control and Information Processing, Shanghai Jiaotong University, Shanghai 200240, China; 3. State Key Laboratory of Mechanical System and Vibration, Shanghai Jiaotong University, Shanghai 200240, China; 4. Jiangsu Key Laboratory of Advanced Food Manufacturing Equipment and Technology, Jiangnan University, Wuxi, Jiangsu 214122, China)
To obtain the type synthesis of three-translational and one-rotational (3T1R) hybrid mechanisms, an efficient synthesis methodology is proposed based on fractal theory and topological graph. The major concept of this method is to transform the hybrid mechanism into linkage mechanism, whose main frame is determined by topological graph and whose links are composed of the assignment of kinematic pairs. Fractal theory is applied to the topological graph, and the permutation and combination of output displacement set and selecting suitable kinematic pairs are conducted to achieve the configuration diversity of hybrid mechanisms. The route rule for dealing with the topological graph is proposed, and the calculation rule of union-intersection-preserving for deriving the kinematic pair’s output is presented. According to fractal theory and topological graph, the hybrid mechanism is classified into two types. Thereafter, a relationship model of hybrid mechanism and fractal theory is established, so the mechanical design and fractal theory are unified in mathematics and logic. Matlab is utilized in type synthesis of 3T1R hybrid mechanism, and one of the configurations is achieved, demonstrating the validity of the proposed methodology.
hybrid mechanism; type synthesis; fractal theory; 3T1R
2016-03-25。 作者简介:葛姝翌(1992—),女,硕士生;曹毅(通信作者),男,副教授。 基金项目:国家自然科学基金资助项目(50905075,51505190);江苏省“六大人才高峰”行动计划资助项目(ZBZZ-012);系统控制与信息处理教育部重点实验室开放课题资助项目(scip201506);机械系统与振动国家重点实验室开放课题资助项目(MSV201407)。
时间:2016-09-23
10.7652/xjtuxb201611012
TH112
A
0253-987X(2016)11-0075-08
网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20160923.1549.004.html
