一种利用磁流体液流变效应的在线动平衡方法
2016-12-22张西宁尤亚男王奔
张西宁,尤亚男,王奔
(西安交通大学机械制造系统工程国家重点实验室,710049,西安)
一种利用磁流体液流变效应的在线动平衡方法
张西宁,尤亚男,王奔
(西安交通大学机械制造系统工程国家重点实验室,710049,西安)
针对现有在线动平衡方法存在的缺陷,提出了一种新的基于磁流体流变效应的在线动平衡方法。从理论上分析和阐明了局部磁场作用下磁流体由于内部压力变化导致产生质量偏心的原理,利用线激光投影测量法,对不同磁场条件下的磁流体表面进行实验测试。对所得磁流体三维形貌图分析可知,在局部磁场作用方向上,磁流体质量偏心程度随磁感应强度的增加而增加,验证了利用磁流体流变效应实现动平衡的可行性。为实现对任意大小和方向失衡量的校正,设计了平衡容器及3个互成120°的共轭C型电磁铁,通过构建电磁铁有限元模型,对给定电流下电磁铁周围磁感应强度进行了分析。实验中利用电磁铁线圈电流变化实现在线动平衡,实验结果表明,磁流体流变效应产生的质量偏心可用于转子失衡校正,一次校正后不平衡量下降率达65.14%。实验验证了提出的动平衡方法的有效性。
转子;在线动平衡;磁流体;电磁铁
机床是机械制造业的基础设备[1],也是一个国家工业水平的重要标志。主轴失衡振动是机床工作中的常见问题,微小的主轴失衡量都会产生很大的振动,影响加工件的精度和表面质量[2]。为了降低主轴工作过程的失衡振动,保证加工精度,提高工作效率,在不停机情况下校正主轴的失衡已成为机床主轴平衡技术的发展趋势[3-5]。
现有的在线动平衡方法可以分为气体式、机械式、电磁式和注液式等类型[6]。尽管以上在线动平衡方法在实际应用中取得了较好效果,但仍然存在一些缺陷。气体式在线动平衡装置密封性要求高、结构复杂、成本高,且由于气体介质轻,使得平衡校正量有限。机械式在线动平衡装置结构复杂,零部件较多,配重块在高速下难以准确定位,如2014年浙江大学顾超华等设计的多通道投钢珠机械式平衡头需要钢珠导向板、隔离板等16种零部件,且导向板等形状不规则,存在设计加工困难的问题[7]。电磁式的同样也存在结构复杂,零部件多,设计、制造和安装困难等问题,如2012年西安交通大学马石磊等设计的新型电磁动平衡装置,由加工有凸台的转轴和多个鼠笼状铁心等组成,转轴和铁心在旋转中同轴度难以保证[8]。又如2013年西安交通大学樊红卫等研制的电磁配重型在线自动平衡头需要配重盘、磁性盘等11种零部件,结构较为复杂[9]。注液式在线动平衡装置在注排液过程中容易导致平衡介质雾化,易引起环境污染或金属锈蚀。上述几种在线动平衡装置普遍存在结构复杂、组件多、精度要求高、成本高等问题。
磁流体作为一种可控流体,具有优良的电磁学和机械流变属性[7-8]。本文通过对磁流体流变效应引起的质量分布变化的分析,提出了一种基于磁流体液流变效应的在线动平衡方法。该方法利用磁流体液流变效应产生的偏心质量补偿转子的失衡量,可望用于实现机床主轴的在线动平衡。
1 磁流体动平衡原理
磁流体是由直径为纳米量级的磁性固体颗粒、基载液以及界面活性剂3者混合而成的一种稳定的胶状液体[9]。磁流变效应是磁流体的重要特性,在无外加磁场时,磁流体呈现出牛顿流体的性质;在有外加磁场时,磁流体会瞬间产生磁流变效应,黏度增加,呈现出非牛顿流体的Bingham塑性体的行为[10-11]。当剪切应力小于其屈服应力时,磁流体做类似固体的运动;当剪切应力超过其屈服应力时,磁流体做黏性流动。发生流变后磁流体中的磁性固体颗粒呈现各向异性,颗粒沿磁场方向形成链条分布结构,这种链条分布结构使磁流体的导热系数、黏度发生变化。当磁场消失后,磁流体会瞬间恢复到原始的状态[12]。
磁流体流变效应除了改变磁流体的物理性能外,还会引起磁流体表面形貌和质量分布的变化[13-15]。图1给出了在局部磁场作用下,磁流体的质量分布在垂直方向上发生变化的情况。假设密封在圆形容器中的磁流体随容器以一定的速度匀速旋转,在离心力的作用下,磁流体液将沿容器内壁均匀分布,如图2a所示。
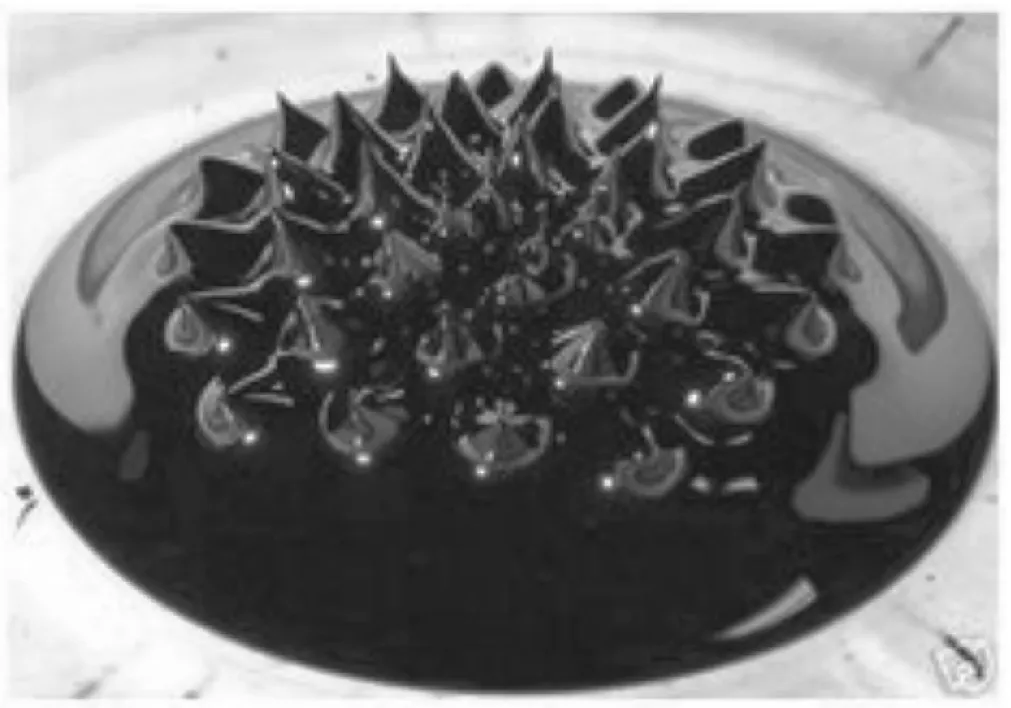
图1 磁场作用下磁流体液形貌变化图
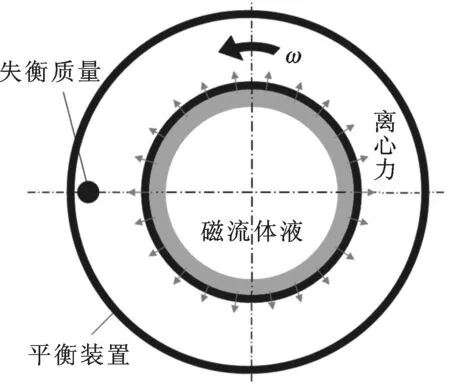
(a)无局部磁场
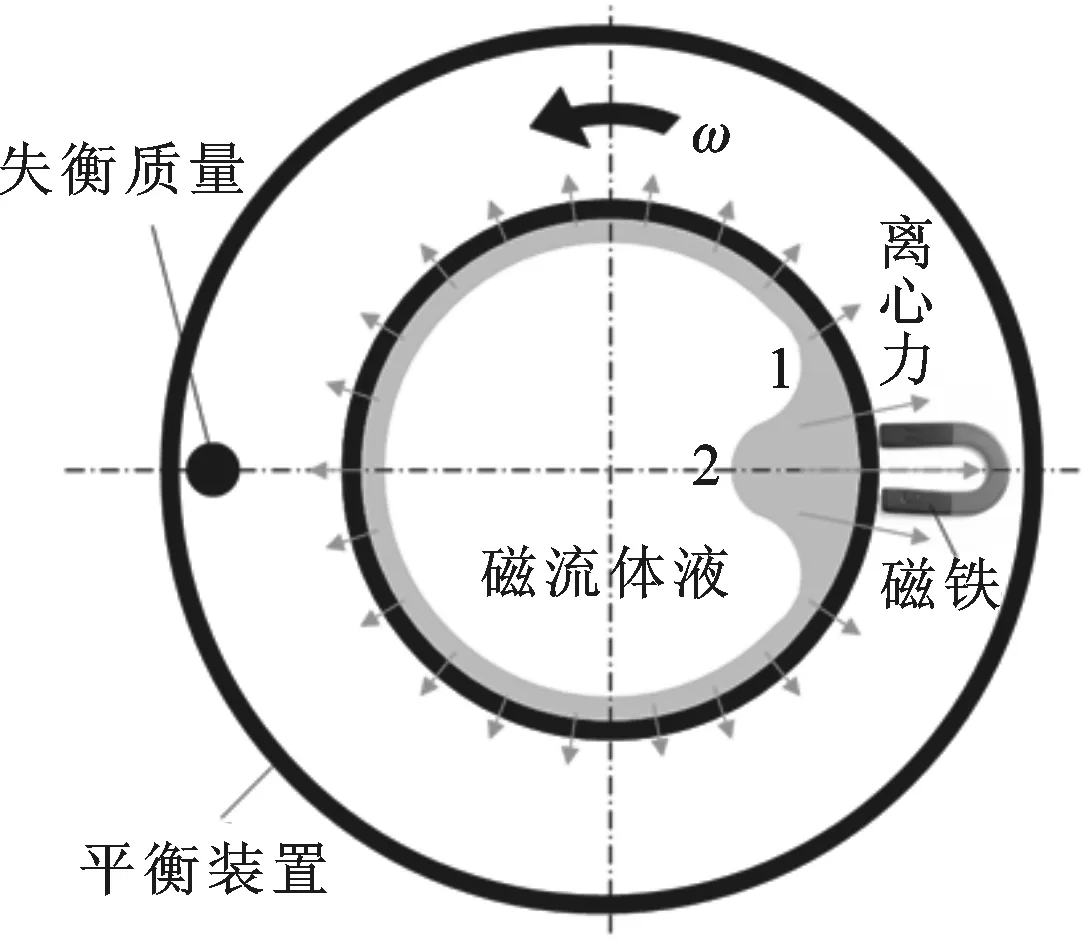
(b)有局部磁场图2 磁流体动平衡原理图
当发生流变效应后,在旋转离心力、重力以及流变效应产生的磁压力共同作用下,磁流体分布形貌相对容器保持不变。根据等温流动以及流场温度远低于Curie温度条件下的Bernoulli方程[16],可得到如下铁磁流体动力学方程
(1)
式中:p为压力;ρf为磁流体密度;V为流动速度;μ0为真空磁导率;M为磁化强度;H为磁场强度;C为常数。
由铁磁流体动力学方程可得到,静止情况下,无磁场的铁磁流体表面点1和有水平向磁场的铁磁流体表面点2处压力的关系式如下
(2)
式中:p1、p2为点1、点2处的压力;h1、h2为点1、点2处的磁流体平面高度。
(3)
边界条件中pa为外界大气压,Mn为法向磁化强度。
式(3)表明,在外加水平向磁场作用下磁流体表面会克服重力沿垂直方向上升。因此,式(3)从理论上说明了在局部磁场作用下磁流体表面形貌会发生变化,从而使磁流体的质量分布发生变化。图2b中的磁流体由于在水平面内施加了局部径向磁场,磁流体的质量分布会沿径向向中心偏移。当容器处于旋转运动时,在离心力作用下其他位置的磁流体会及时补充到磁场作用处直到压力平衡为止,从而形成一定大小的平衡校正质量。因此,借助磁流体流变效应产生的偏心质量,可实现对相反方向上失衡质量的校正。
为实现对任意大小和方位失衡量的校正,必须使旋转容器中磁流体的流变效应能够产生确定大小和方位的校正质量。为了产生合适的校正质量,需要改变电磁铁的磁场强度,即通过调整电磁铁线圈的电流来实现。为了实现在确定方位上产生所需大小的校正质量,结构上采用了3个120°间隔分布的电磁铁,将校正质量分解到与之相对的两个120°间隔方向的电磁铁上,通过控制这两个电磁铁线圈电流的大小和比例来产生合适大小和方位的校正量。同时,为避免由于电磁铁补偿质量和所需补偿质量方向大于90°而产生的质量抵消,另一相电磁铁不提供补偿质量,电流置0。图3给出了实现某一失衡质量校正的原理。假设转子左侧面存在失衡质量,将校正量分解至方位差大于60°的两个电磁铁方向,同时对这两相电磁铁通电,另一相电磁铁电流置0。根据三角形正弦定理
(4)
由总校正量可以计算出A、B两相电磁铁分别需要提供的校正量。

图3 失衡量矢量分解图
2 磁流体流变后质量分布变化实验
利用磁流体液在线动平衡的基础是磁流体液发生流变后引起的质量分布变化。为了验证在磁场作用下磁流体流变产生的质量分布变化,设计并进行了不同磁场下磁流体形貌和质量分布的实验。测量方案如图4所示,将磁流体盛放在载物台,永磁体固定在载物台正下方,相机固定于载物台正上方。使用线激光投影测量法,将激光以一定角度照射在加载过磁场的磁流体表面,每次会依据其形貌出现一束激光投影条纹。
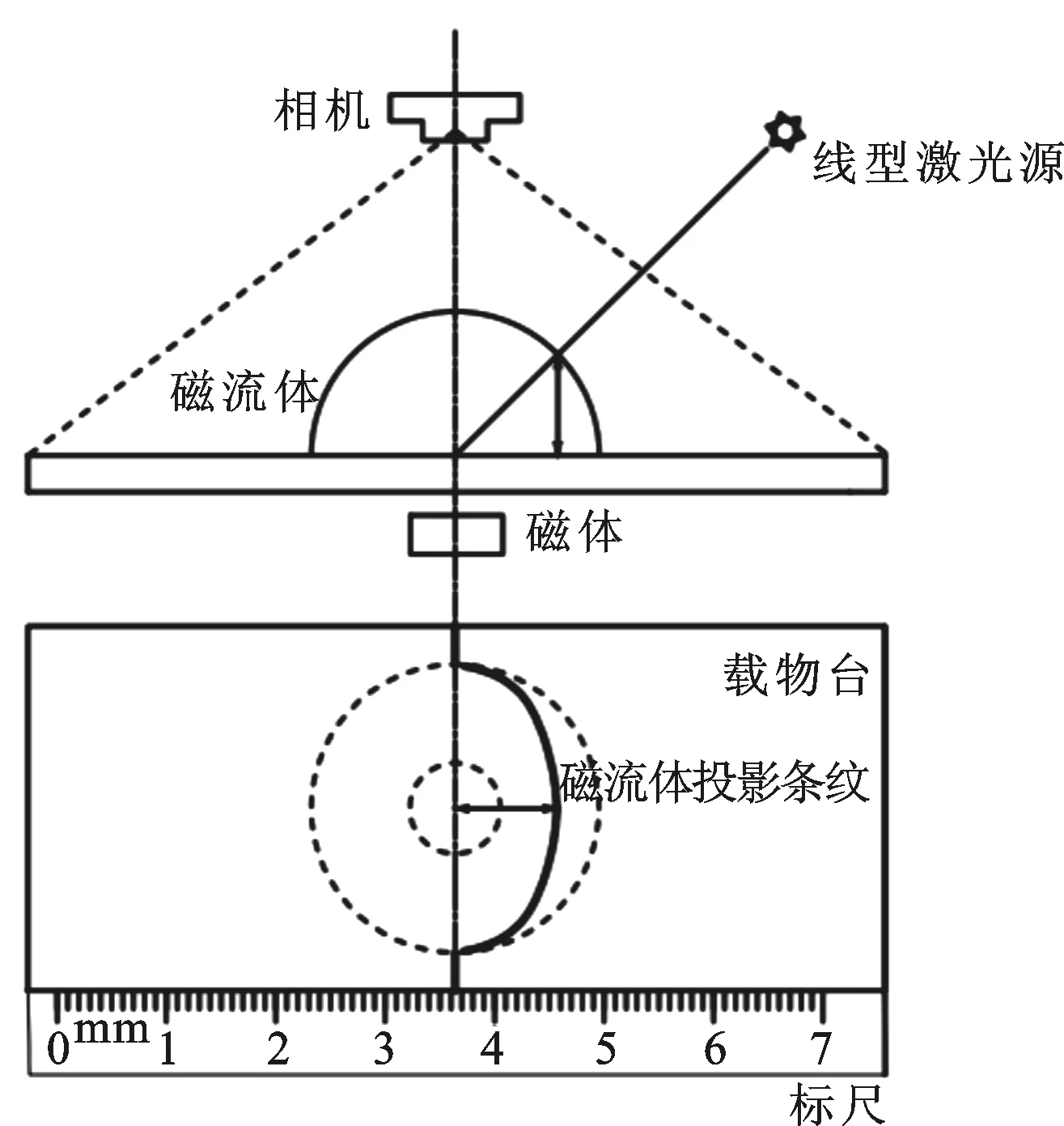
图4 线激光投影测量法示意图
采用相机拍照记录激光投影条纹。将载物台沿某一特定方向移动2 mm,拍照后再次移动,直至测量形貌的条纹变为水平且不再变化时停止,所得条纹图像如图5所示。为了方便提取测试图像中的信息,采用Matlab平台进行处理,经过图像读取、红色分量提取、曲线汇总拟合、去杂质和光滑处理之后,可以得到磁流体总体三维形貌。

图5 条纹图像示例

(a)1块磁铁

(b)2块磁铁
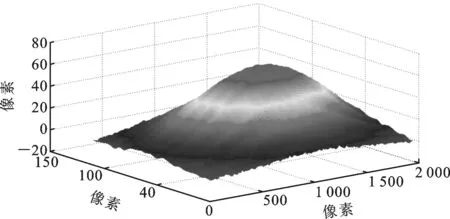
(c)3块磁铁图6 不同磁场作用下的磁流体三维形貌图
实验中为探究磁流体形貌变化与磁感应强度(中心点处)的关系,设定了3种不同的磁感应强度,如表1所示,并通过对测试数据、图像等分析处理,分别得出3种磁感应强度下磁流体的三维形貌变化。由图6可以看出磁流体流变后的形貌随磁场强度变化情况,磁流体形貌的高度随磁场强度的增加而增加,即磁流体沿高度方向上的质量分布、质心随磁场强度的增加而增加。因此,实验验证了通过改变磁场强度能够改变磁流体的质量分布,同时也表明了采用磁流体的流变效应使磁流体产生偏心质量,进而实现动平衡是可行的。
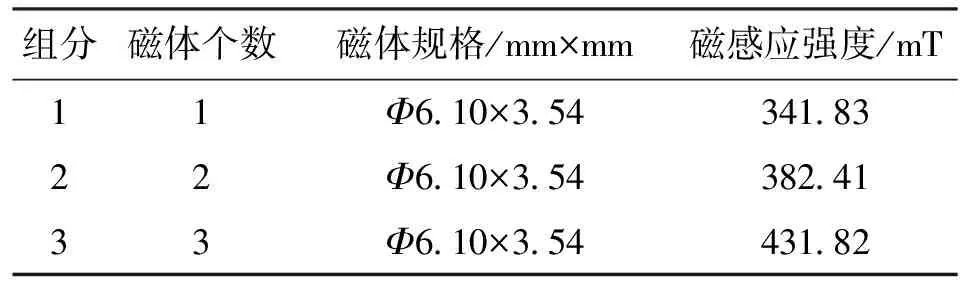
表1 实验条件列表
3 实验中的电磁铁设计及仿真分析
本文提出的在线动平衡方法是将磁流体和电磁铁密封于旋转容器,利用磁流体在磁场作用产生的偏心质量校正转子的失衡。因此,实验中提供可变磁场的电磁铁设计和分析尤为重要。在动平衡过程中,电磁铁密封安装在旋转容器内部,与其同步旋转,应具有体积小、质量轻、散热性好的特性。本文自主设计了如图7所示的共轭C型电磁铁,采用DT4纯铁材料,保证电磁铁在通电时可在容腔的外侧壁产生磁场,两端气隙开口沿着径向处于较远端,可以更大程度上发挥对磁流体的控制功能。

(a)铁芯设计图

(b)三维建模图图7 共轭C型电磁铁三维模型
电磁铁磁感应强度分布求解通常采用磁路和磁场两种方法。磁路方法简单易行,计算工作量小,但计算精度低,无法满足现代设计的需求;磁场的方法计算复杂,可利用有限元软件ANSYS对电磁铁进行三维磁场分析,能达到很高的计算精度。由于本电磁铁结构具有对称性,从降低计算量角度出发,在磁路仿真过程中,沿对称轴对结构的1/4部分进行重构。设定线圈匝数为600圈,励磁电流为1.5 A,根据图8可以看出电磁铁内部磁路情况以及在气隙位置的磁感应强度分布,发现在电磁铁铁芯结构传递过程中,拐角处磁感应强度出现了峰值,随着距离励磁线圈越远,其磁感应强度也出现了下降趋势。在气隙处,磁场由磁性介质进入空气,磁力线出现发散现象,图9分析了气隙处磁感应强度的变化情况,最大磁感应强度达到264 mT。
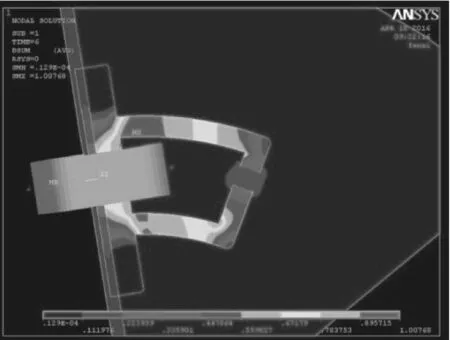
图8 电磁铁内部及气隙磁感应强度分析
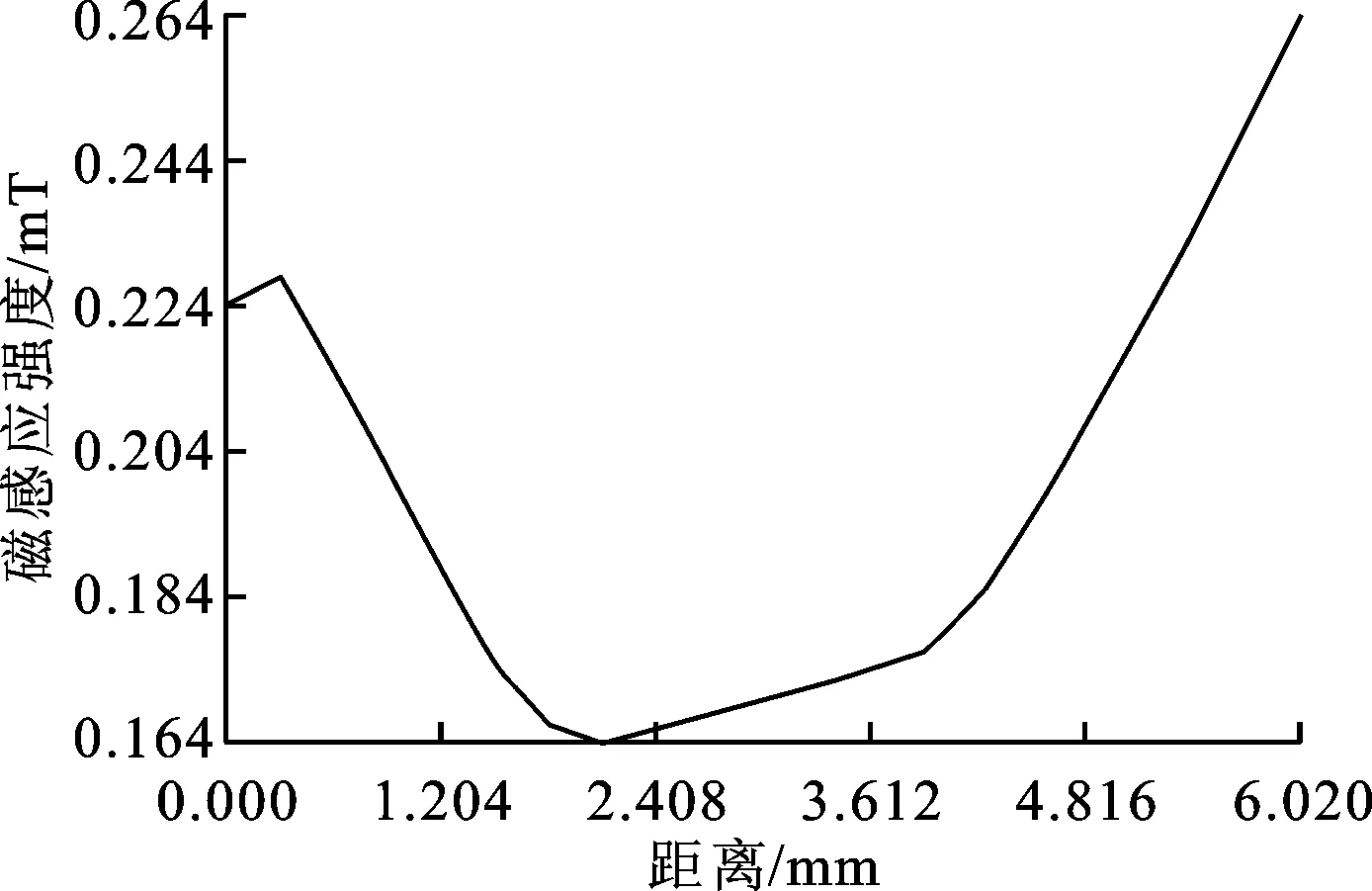
图9 气隙中磁感应强度的变化
4 磁流体在线动平衡实验
动平衡实验系统以上海申克公司生产的HV2-30型立式动平衡机为主进行构建。立式动平衡机的作用一是为装有磁流体和电磁铁的平衡容器提供旋转的驱动,二是显示实验平衡装置当前的失衡质量。平衡装置包含平衡主体盘、电磁铁、磁流体、端面盖板和导电滑环5部分,将磁流体和电磁铁置于平衡主体盘内部,平衡主体盘安装于动平衡机转动平台上,使用端面盖板进行密封,导电滑环用于避免旋转过程中可能产生的导线缠绕现象。实验中的电磁铁线圈电流由直流电源提供。
4.1 初始失衡量的测定
实验转速设定为230 r/min,利用动平衡机测量系统初始不平衡量为1.07 g,角度为32°。校正量与其大小相等,方向相反。根据三角形正弦定理将校正量分解到A、B两相电磁铁,质量分别为1.24 g和0.58 g,如图10所示。
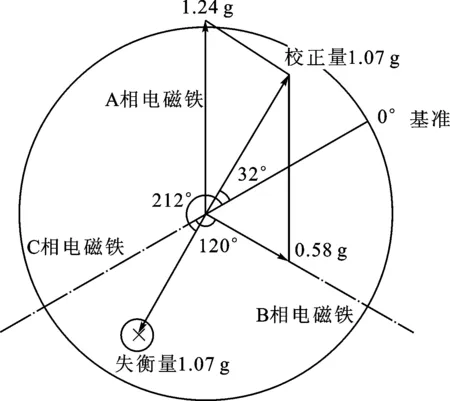
图10 初始失衡量矢量分解图
4.2 电磁铁通电后失衡量的测定
实验首先分别测定了在230 r/min下A、B相电磁铁单独通电时所产生的校正质量。然后由实验数据分别得到A、B两相电磁铁通电电流与校正质量间的关系。再根据A、B两相电磁铁应提供的校正质量1.24 g和0.58 g,分别调整A、B两相电磁铁上施加的电流大小,并从平衡机上读取剩余不平衡量。当转速为230 r/min、给A相和B相电磁铁电流分别施加电流0.2 A和0.15 A时,得到残余不平衡质量为0.373 g,角度为298°。施加电流后不平衡质量的校正率为65.14%。实验结果验证了基于磁流体流变效应的动平衡方法的效果。
5 结 论
本文提出了一种基于磁流体流变效应的在线动平衡方法,从理论上分析了磁流体在局部磁场作用下质量分布发生变化,从而产生质量偏移的原理。采用线激光投影测量法获得了不同大小磁场作用下磁流体表面的三维形貌图,得到了磁流体在磁场作用方向上的质量偏心程度随磁场强度增加而递增的规律,从实验上验证了采用磁流体进行动平衡的可行性。设计了平衡容器及3个互成120°的电磁铁,实现对任意大小和方向失衡量的校正。同现有的机械式和电磁式平衡头相比,本文设计的平衡装置结构简单,仅需要平衡主体盘、电磁铁等5个零部件,同时电磁铁内置于主体盘内部,磁场和转轴同轴度得到保证,并且不存在气体式和注液式平衡装置的气体泄漏和液体雾化问题。ANSYS仿真分析得到的最大磁感应强度可达264 mT,满足了设计要求。动平衡实验结果表明,磁流体流变效应产生的质量偏心可用于转子失衡校正,一次校正后不平衡量下降率达65.14%,验证了基于磁流体流变效应的在线动平衡方法的效果。
[1] BORT C M G, LEONESIO M, BOSETTI P. A model-based adaptive controller for chatter mitigation and productivity enhancement in CNC milling machines [J]. Robotics and Computer-Integrated Manufacturing, 2016, 40: 34-43.
[2] ZHANG S, CAI Y. A new double-face online dynamic balance device and its control system for high speed machine tool spindle [J]. Journal of Vibration and Control, 2016, 22(4): 1037-1048.
[3] 张玉光. 动平衡测试技术研究 [D]. 长沙: 国防科学技术大学, 2006: 7-15.
[4] 章云, 梅雪松. 高速主轴动平衡及其在线控制技术研究 [J]. 机械工程学报, 2014, 50(11): 79. ZHANG Yun, MEI Xuesong. Study of online balancing control technique for high-speed spindles [J]. Journal of Mechanical Engineering, 2014, 50(11): 79.
[5] 章云, 梅雪松, 胡振邦, 等. 注液式高速切削主轴动平衡装置设计及其性能研究 [J]. 西安交通大学学报, 2013, 47(3): 13-17, 23. ZHANG Yun, MEI Xuesong, HU Zhenbang, et al. Design and performance analysis of hydrojet-typed balancing device for high-speed machine tool spindle [J]. Journal of Xi’an Jiaotong University, 2013, 47(3): 13-17, 23.
[6] 李长河, 原所先, 修世超, 等. 超高速磨削中的砂轮自动平衡技术 [J]. 新技术新工艺, 2004(5): 29-31. LI Changhe, YUAN Suoxian, XIU Shichao, et al. Automatic balancing technology of grinding wheel in super-high speed grinding [J]. New Technology & New Process, 2004(5): 29-31.
[7] 王瑞金, 王常斌. 磁流体技术的工业应用 [J]. 力学与实践, 2004, 26(6): 8-13. WANG Ruijin, WANG Changbin. The industrial applications of the magnetic fluid technique [J]. Mechanics and Engineering, 2004, 26(6): 8-13.
[8] 徐梦洁, 李醒飞, 吴腾飞, 等. 磁流体动力学陀螺仪的结构设计与实验研究 [J]. 仪器仪表学报, 2015, 36(2): 394-400. XU Mengjie, LI Xingfei, WU Tengfei, et al. Structure design and experiment study for MHD gyroscope [J]. Chinese Journal of Scientific Instrument, 2015, 36(2): 394-400.
[9] 史修江, 王优强. 不同载液磁流体热弹流润滑性能对比 [J]. 机械工程学报, 2013, 49(3): 106-110. SHI Xiujiang, WANG Youqiang. Thermal elastohydrodynamic lubrication property contrast studies of different carrier fluid ferrofluid [J]. Journal of Mechanical Engineering, 2013, 49(3): 106-110.
[10]AHMED G M S, REDDY P R, SEETHARAMAIAH N. Experimental investigation of magneto rheological damping effect on surface roughness of work piece during end milling process [J]. International Journal of Precision Engineering and Manufacturing, 2012, 13(6): 835-844.
[11]ASHOUR O, ROGERS C A, KORDONSKY W. Magnetorheological fluids: materials, characterization, and devices [J]. Journal of Intelligent Material Systems and Structures, 1996, 7(2): 123-130.
[12]KAVLICOGLU N C, KAVLICOGLU B M, LIU Y, et al. Response time and performance of a high-torque magneto-rheological fluid limited slip differential clutch [J]. Smart Materials & Structures, 2007, 16(1): 149-159.
[13]NAKAMOTO K, ADACHI K, SHIRASE K. Proposal of real-time balancing mechanism using magnetic fluid for machine tool spindle [J]. Journal of the Japan Society for Precision Engineering, 2007, 75(4): 387-390.
[14]NAKAMOTO K, HORII S, ADACHI K, et al. Real-time balancing mechanism using magnetic fluid for a machine tool spindle proposal of real-time balancing mechanism and verification based on test spindle [J]. Journal of the Japan Society of Precision Engineering, 2009, 75(4): 509-513.
[15]NAKAMOTO K, MITSUHASHI S, NAKATSUJI H, et al. Real-time balancing mechanism using magnetic fluid for a machine tool spindle (2nd report) development of a machine tool spindle to verify real-time balancing mechanism [J]. Journal of the Japan Society of Precision Engineering, 2010, 76(11): 1271-1275.
[16]池长青, 王之珊, 赵丕智. 铁磁流体力学 [M]. 北京: 北京航空航天大学出版社, 1993: 172-174, 280.
(编辑 杜秀杰)
An Online Dynamic Balancing Method with Magnetic Fluid Magneto-Rheological Effect
ZHANG Xining,YOU Yanan,WANG Ben
(State Key Laboratory for Manufacturing System Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
Focusing on the defects of the existing online dynamic balancing methods, a new online dynamic balancing method with magneto-rheological effect of magnetic fluid is proposed. The principle of eccentric mass generation due to the change of internal pressure of magnetic fluid under local magnetic field is theoretically analyzed and expounded. The surface topographical images of magnetic fluid are obtained with line laser projection measurement method. It is found that the degree of eccentric mass increases with magnetic induction in the direction of the local magnetic field, thus the practicability of dynamic balancing with magneto-rheological effect is verified. The structure of balancing container and three conjugated C-type electromagnets with 120° each other are designed to implement the correction of unbalance with any arbitrary magnitude and angle. Constructing a finite element model of the designed electromagnet, the magnetic induction intensity of electromagnet is analyzed under given current condition. In the experiment, on-line dynamic balancing is accomplished by utilizing current change of the electromagnet coil. The result of balancing experiment shows that eccentric mass generation due to magneto-rheological effect of magnetic fluid can be employed to correct the rotor unbalance, and the unbalance is decreased by 65.14% after once correction. The performance of the proposed method is also verified.
rotor; online dynamic balance; magnetic fluid; electromagnet
2016-06-08。 作者简介:张西宁(1965—),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(51275379);国家自然科学基金创新研究群体资助项目(51421004)。
时间:2016-09-22
10.7652/xjtuxb201612002
TH17
A
0253-987X(2016)12-0006-06
网络出版地址:http: ∥www.cnki.net/kcms/detail/61.1069.T.20160922.1839.008.html