超空泡航行器扩张尾裙流体动力特性试验研究
2016-12-20王科燕邓飞张衡冯潇涛赵建鹏
王科燕,邓飞,张衡,冯潇涛,赵建鹏
(1.西北工业大学航海学院,710072,西安;2.北京机电工程研究所,100074,北京;3.92330部队,266102,山东青岛)
超空泡航行器扩张尾裙流体动力特性试验研究
王科燕1,邓飞1,张衡2,冯潇涛3,赵建鹏1
(1.西北工业大学航海学院,710072,西安;2.北京机电工程研究所,100074,北京;3.92330部队,266102,山东青岛)
为了研究超空泡航行器扩张尾裙的流体动力特性,采用模块化设计方法设计了5种不同外形的扩张尾裙试验模型,并在11 m/s恒定水洞水速下通过调节通气系统控制通气流量、改变模型气泡包层内压力和通气空化数,分别对系列不同结构参数的扩张尾裙模型进行了超空泡流体动力特性的比对试验研究。试验中分析了不同的通气量、半锥角(2°,4°,6°)和底面直径(Φ43 mm,Φ45 mm,Φ47 mm)的扩张尾裙对空泡尾部闭合流型的影响规律,讨论了沾湿面变化规律对航行器尾部流体动力特性的影响。结果表明,扩张尾裙的阻力系数、升力系数都随着半锥角(尾裙底径)的增大而增大,相对而言对阻力的变化更敏感,升力方向变化率较小。该结果对进一步深入开展头部空化器、尾裙控制面与推力矢量配合的流体动力布局设计提供了有力的技术支撑。
超空泡;扩张尾裙;流体动力特性;空化
未来水中兵器朝着高航速、远航程和智能化方向发展[1-2],而传统水下航行技术受制于水的巨大阻力和当前推进技术,很难突破80节(约40 m/s)的速度极限[3]。由于海水的密度远远高于空气的密度,所以在同等速度、同等航行器外形和尺度的条件下,水下航行器所受阻力中表面摩擦阻力的影响比较大,而航行器的沾湿表面积与雷体的阻力均占全雷的90%以上。迄今为止,各国一直致力于高速水中兵器的水动力性能、减阻降噪机理等方面研究,寻求降低高速水下航行器阻力的方法[4-6]。就现阶段技术水平来讲,要想单纯依赖优化雷体线型或采用某种技术方法来获取超高水下航速的方法是不现实的,还要借助于流动模式的革命性变革[7-8]。超空化就是一种全新的流动模式,在这种模式下航行器处于头部空化器产生的超空泡之中,且大部分表面处于气体之中,因此摩擦阻力大大降低,如果外形设计得当,则航行器的总阻力将显著降低,比全沾湿状态的阻力低1~2个量级。借助超空化减阻效应,自推进超空泡水下航行器的速度可达100 m/s,而超高速水下射弹的速度可达1 000 m/s,可见该速度达到并超过水中声速(约为1 500 m/s),表明超空泡水下航行技术具有划时代的意义[9-11]。
由于空泡的存在,使得超空泡航行器在动力学特性上与常规水下航行器存在着巨大差异。我国众多学者开展了超空泡航行器头部空化器的水动力特性研究,其中航行器尾段沾湿控制力是超空泡航行器实现力系平衡与运动稳定的重要保证之一,同时由于尾段空泡流的闭合与溃灭影响,尾部控制面的有效设计也是实现超空泡航行器流体动力设计的重要因素。蒋增辉等人试验研究的主要关注点是空泡闭合特性对圆柱尾段的流体动力影响规律,其仍然是按照鳍舵控制思路开展的水动力特性研究[12]。
本文旨在研究超空泡航行器尾部设计中用扩张尾裙替代传统的尾舵控制面,并讨论其对超空泡航行器空泡流形的影响规律,以及航行器尾部的流体动力特性,以期为该尾部外形的超空泡航行器流体动力布局设计提供必要的数据支撑。
1 试验模型与设备
本文模型试验在高速水洞中进行,该高速水洞为闭式循环水洞,如图1所示,其工作段的尺寸为Φ400 mm×2 000 mm,水速在0~18 m/s可调,压力为20~300 kPa(绝对压力),最小空化数为0.15。
通气系统可以实现模型的自动通气和流量控制,通气流量为0~200 L/min,精度为1%,满足各种航行器空泡流形的需求,如图2a所示。内置杆式测力天平安装在系列试验模型内,并且与计算机连接,如图2b所示,从而实现实时天平受力与所受力矩,保证测量值的及时性、有效性与准确性。

图1 闭式循环高速水洞

(a)通气控制装置

(b)内置杆式测力天平图2 通气控制装置及内置杆式测量天平
本试验模型主要参照了德国“梭鱼”[5]和俄罗斯“暴风雪”[5],并采用模块化进行了设计,设计方案如图3a所示。模型头部由圆盘空化器、导流碗组成,主要实现超空泡的起始与通气维持。总体外形包括前锥段、圆柱直段与扩张裙尾段,设计思想是由外形适配和圆盘空化器生成椭球形超空泡,并依靠尾裙来控制空泡闭合沾湿区域。试验模型设计为分段连接形式,可根据不同试验项目采用不同组合。内置杆式测力天平安装在模型中段,外接气源经模型内部通气管路通向头部通气碗。模型头部通气结构如图3b所示。

(a)模型装配图
(b)模型头部通气结构图3 试验模型装配及头部通气结构图
扩张尾裙的所有试验模型如图4所示,其半锥角有3种,分别为2°、4°、6°,底面直径有3种,分别为Φ43 mm、Φ45 mm、Φ47 mm。底径为Φ45 mm的试验模型有3个,其半锥角分别为2°、4°、6°;半锥角为4°的试验模型有3个,其底径分别为Φ43 mm、Φ45 mm、Φ47 mm。

图4 扩张尾裙模型
试验模型采用通气转接头与水洞中的辅助固定装置——悬臂尾固定连接,如图5所示。这种固定连接方式可以实现航行体轴向力、法向力以及法向力矩的测量。

图5 整体模型及尾支撑安装模型
悬臂尾为空腔结构,内置三分量测力天平的数据采集线和通气管通气软管。悬臂尾的竖直支杆包裹着导流罩,以减小竖直支杆对流场的影响,进而减小对尾部空泡的影响,便于观察航行器的空泡形态。综合考虑水洞洞壁效应及模型结构设计的限制,模型选择合适的主尺度比例。由于整个试验是在水下进行,需要满足抗腐蚀的要求,所以整个模型采用不锈钢材料制成。
2 试验过程与结果
试验中采用变则相似特性。水洞水速保持恒定为11 m/s,水洞压力基本稳定于96.26 kPa。试验中的主要变量是通气空化数和尾裙结构参数。通过调节通气流量、改变模型气泡包层内的压力,可以改变通气空化数。尾裙结构参数由尾裙试验模型的结构设计来保证。
沾湿摩擦力是超空泡航行器受力的最重要的来源,沾湿面积的变化会导致受力变化,而流场特性因素,如涡旋、压力分布等造成的诱导力比较小,因此本文主要分析沾湿表面积对超空泡航行器升、阻力系数的影响。
2.1 空泡流形对升、阻力系数的影响
(a)扩张尾裙之前空泡流形闭合
(b)扩张尾裙之上空泡流形闭合

(c)扩张尾裙之后空泡流形闭合图6 不同通气流量的空泡流形
0°攻角时不同通气流量下的空泡流形如图6所示。通气流量为Q1时,空泡流形在扩张尾裙之前闭合,即空泡不包裹扩张尾裙;通气流量增大为Q2时,空泡流形在扩张尾裙之上闭合,即空泡半包裹扩张尾裙;通气流量继续增大为Q3时,空泡流形在扩张尾裙之后闭合,即空泡完全包裹扩张尾裙。
半锥角4°、尾裙底径Φ45 mm的扩张尾裙模型在不同空泡流形和不同攻角下的阻力系数、升力系数的试验值如图7与图8所示。

图7 不同空泡流形下阻力系数的变化

图8 不同空泡流形下升力系数的变化
从图7中可以看出,扩张尾裙的阻力系数随着通气量的改变而显著变化,通气量越大,阻力系数越小。其原因在于,不同的通气量下扩张尾裙的沾湿面积不同,沾湿面积越大,阻力系数越大。在Q1时,扩张尾裙未在空泡流形内,其外表面完全为沾湿表面。在Q3时,扩张尾裙完全在空泡流形内,其沾湿表面面积为0。
在相同的通气量下,0°攻角附近扩张尾裙的阻力系数随攻角的变化不明显,尤其是在Q3,即空泡流形闭合点在扩张尾裙之后时,空泡完全包裹扩张尾裙,尾裙段在空泡内,基本无沾湿,所以阻力系数很小,且基本不变化。
从图8中可以看出,扩张尾裙的升力系数随着通气量的变化显著,通气量越大,升力系数越小。其原理与阻力系数类似,主要受沾湿表面面积变化的影响。在Q3,即空泡流形闭合点在尾裙之后时,攻角在小范围内变化,尾裙段在空泡内且基本无沾湿,所以升力系数很小,变化也很小。
2.2 不同尾裙底径对升、阻力系数的影响
半锥角为4°时不同尾裙底径下的流体动力系数对比如图9、图10所示。
(a)Q1时

(b)Q2时

(c)Q3时图9 半锥角为4°时不同尾裙底径下的阻力系数
从图9中可以看出,当通气流量、半锥角相同时,随着尾裙底径的增大,阻力系数增大。在Q1时,阻力系数变化最明显,这是由于在该通气量下的空泡流形闭合在尾裙之前,尾裙段全部处于水中,沾湿面积最大,而半锥角相同时,尾裙底径越大,沾湿面积越大,所以阻力系数也就越大。在Q2时,空泡流形闭合于扩张尾裙之上,尾裙底径越大,沾湿面积越大,阻力系数越大。在Q3时,空泡闭合于扩张尾裙之后,即尾裙在0°攻角时全部处于空泡之内,所以0°攻角附近3种不同尾裙底径下的阻力系数几乎都为0,但当攻角变化较大时,尾裙不完全处于空泡流形之内,沾湿面积变化明显,使得阻力系数随底径的变化非常明显,此时尾裙底径越大,阻力系数越大。
(a)Q1时
(b)Q2时

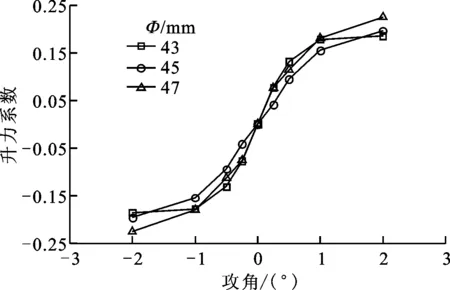
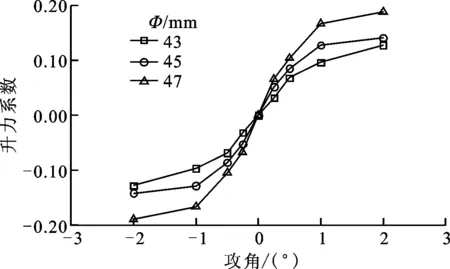
(c)Q3时图10 半锥角为4°时不同尾裙底径下的升力系数
从图10中可以看出,通气量、半锥角相同时,随着尾裙底径的增大,升力系数增大。在Q1时,小攻角下3种不同底径的尾裙升力系数变化不大。在Q2时,随着尾裙底径的增大,升力系数明显增大。在Q3时,小攻角下尾裙底径的变化对升力系数的影响几乎为0,但当攻角变化较大时,尾裙不完全处于空泡流形之内,沾湿面积变化明显,升力系数同样变化明显。
2.3 不同半锥角对升、阻力系数的影响
(a)Q1时

(b)Q2时
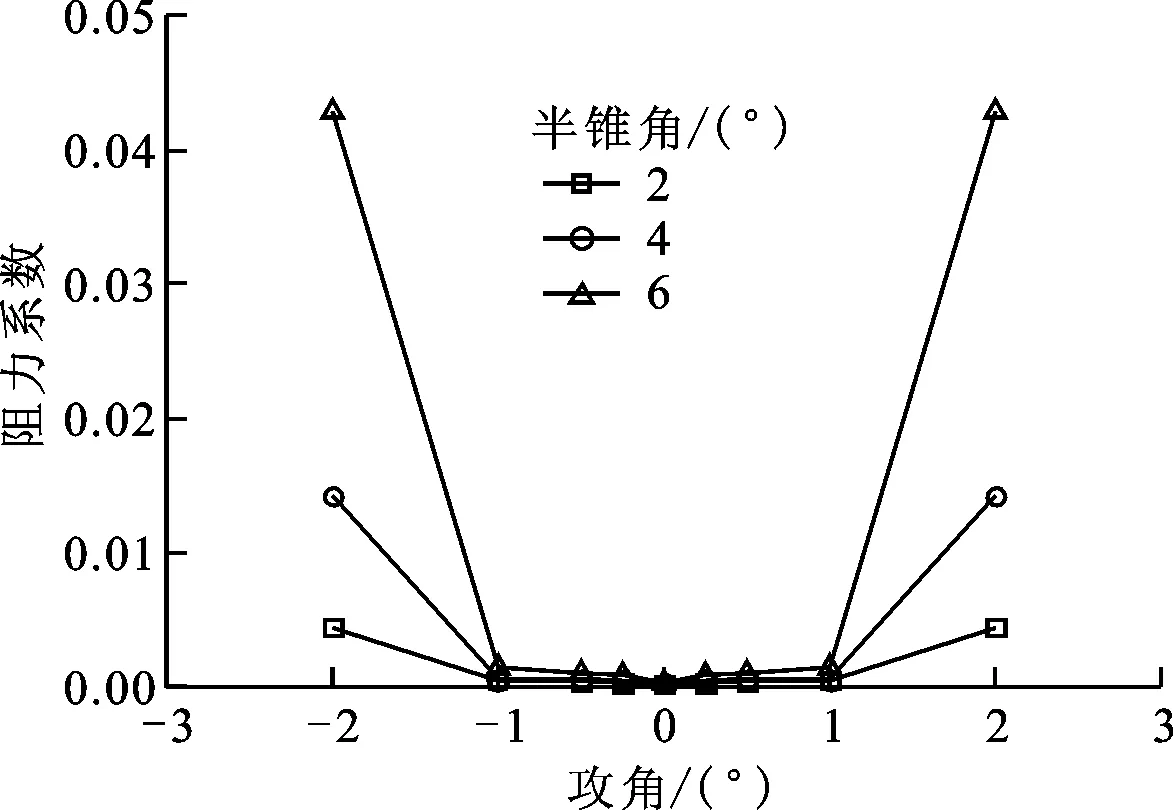
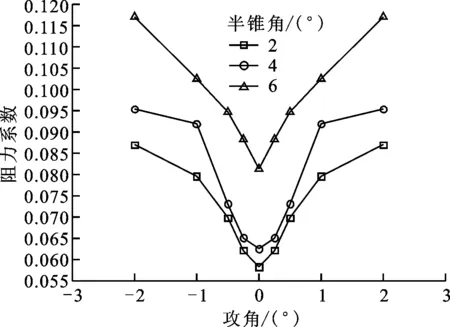
(c)Q3时图11 相同通气量时不同半锥角下的阻力系数
不同半锥角时的流体动力学系数对比如图11、图12所示。从图11可以看出,随着半锥角的增大,阻力系数增大。在Q1和Q2时,阻力系数随半锥角的变化非常明显。在Q3时,小攻角范围内半锥角的变化对阻力系数的影响很小,当攻角较大时,阻力系数随半锥角的变化较大,原因在于此时尾裙不完全处于空泡流形之内,沾湿面积变化明显,阻力系数同样变化明显。
从图12可以看出,随着半锥角的增大,升力系数增大。在Q3时,较小攻角下的升力系数随半锥角的变化非常细微,但较大攻角下的升力系数随半锥角的变化较为明显,原因在于此时尾裙不完全处于空泡流形之内,沾湿面积变化明显,升力系数同样变化明显。

(a)Q1时

(b)Q2时
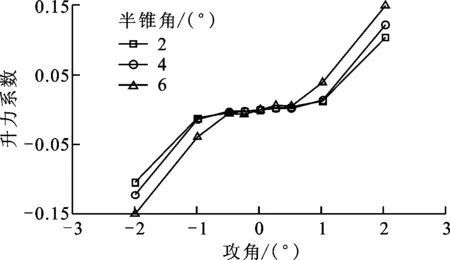
(c)Q3时图12 相同通气量时不同半锥角下的升力系数
3 结 论
通过对试验数据的分析得到如下主要结论。
(1)空泡流形是对扩张尾裙流体动力影响最大的因素,闭合于扩张尾裙之前和之后的扩张尾裙的阻力系数及升力系数相差很大。
(2)扩张尾裙的阻力系数与升力系数随半锥角的增大而增大,在小攻角下,升、阻力系数变化相对不敏感。
(3)扩张尾裙的升、阻力系数都随尾裙底径的增大而增大。较升力系数而言,阻力系数随尾裙底径的变化更加敏感,这也给利用扩张尾裙的超空泡航行器流体动力布局方案提供了重要的参考依据。
[1] 张宇文. 鱼雷外形设计 [M]. 西安: 西北工业大学出版社, 1998: 5-10.
[2] 曹伟, 魏英杰, 王聪, 等. 超空泡技术现状、问题与应用 [J]. 力学进展, 2006, 36(4): 571-579. CAO Wei, WEI Yingjie, WANG Cong, et al. Current status, problems and applications of supercavitation
technology [J]. Advances in Mechanics, 2006, 36(4): 571-579.
[3] ASHLEY S. Warp drive underwater [J]. Scientific American, 2001, 284(5): 70-79.
[4] 高强. 细长超空泡外形研究 [D]. 西安: 西北工业大学, 2005.
[5] 邓飞. 水下超高速航行器超空泡流动机理实验研究 [D]. 西安: 西北工业大学, 2004.
[6] 张宇文, 王育才, 党建军, 等. 细长体空泡流形实验研究 [J]. 水动力学研究与进展, 2004, 22(3): 269-273. ZHANG Yuwen, WANG Yucai, DANG Jianjun, et al. Experimental investigation on cavity flow pattern of slender bodies [J]. Journal of Hydrodynamics, 2004, 22(3): 269-273.
[7] 傅慧萍, 鲁传敬, 冯雪梅. 超空泡武器技术中的几个水动力学问题 [J]. 船舶力学, 2003, 5(7): 112-118. FU Huiping, LU Chuanjing, FANG Xuemei. Some hydrodynamic problems in supercavitation technology [J]. Journal of Ship Mechanics, 2003, 5(7): 112-118.
[8] TULIN M P. Supercavitaing flows-small perturbation theory [J]. Journal of Ship Research, 1964, 7(3): 16-37.
[9] 宋伟峰. 超空泡技术将改变海战模式 [J]. 舰载武器, 2003(2): 20-22. SONG Weifeng. The naval warfare mode changed with supercavitation technology [J]. Shipborne Weapons, 2003(2): 20-22.
[10]闫璞, 池建文, 茹呈瑶. 从伊朗试射超空泡鱼雷看世界超空泡武器的发展 [J]. 国防, 2006(7): 68-70. YAN Pei, CHI Jianwen, RU Chenyao. The world development of supercavitation weapons through viewing Iran supercavitation torpedo trial [J]. National Defense, 2006(7): 68-70.
[11]海天. 未来海战的杀手锏 [J]. 舰载武器, 2005(12): 72-80. HAI Tian. New concept weapons in the future warfare [J]. Shipborne Weapons, 2005(12): 72-80.
[12]蒋增辉, 于开平, 张嘉忠, 等. 超空泡航行体尾部流体动力特性试验研究 [J]. 工程力学, 2008(3): 26-30. JIANG Zenghui, YU Kaiping, ZHANG Jiazhong, et al. Experimental research on hydrodynamic character of aft section of underwater supercavitating bodies [J]. Engineering Mechanics, 2008(3): 26-30.
(编辑 苗凌)
Experimental Research on Hydrodynamic Characteristics of Supercavitating Vehicle Expansion Sterns
WANG Keyan1,DENG Fei1,ZHANG Heng2,FENG Xiaotao3,ZHAO Jianpeng1
(1. School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China; 2. Beijing Institute of Mechatronics Engineering, Beijing 100074, China; 3. Unit 92330, Qingdao, Shandong 266102, China)
To investigate the hydrodynamic characteristics of supercavitating vehicle expansion sterns, a series of 5 expansion stern models with different shapes have been designed with modular method. Under the constant water tunnel speed of 11m/s, the ventilation quantity of ventilation device is adapted and controlled to modify the inner pressure of the model bubble layer and the ventilation cavitation coefficient. Then a serial of supercavitation hydrodynamic characteristics comparison experiments for expansion stern models with different structure parameters is conducted in water tunnel. The characteristics that how the sterns affect the closed shape of the supercavitation are analyzed, with different ventilation quantity, different expansion stern half cone angles (2°, 4°, 6°) and different expansion stern diameters (Φ43 mm,Φ45 mm,Φ47 mm). The relationship between the fluid force and the wetted area of the sterns is discussed. The experimental results show that the drag coefficient and the lift coefficient increase with the increasing half cone angle and the diameter of the expansion stern. Compared with the lift direction, the drag coefficient gets more sensitive to the change of the cone angle and diameter of sterns. This result supports the further research on hydrodynamic layout design with the head cavitator, expansion stern control plane and thrust vector.
supercavitation; expansion stern; hydrodynamic characteristics; cavitation
2015-04-08。 作者简介:王科燕(1989-),女,硕士生;邓飞(通信作者),男,副教授。 基金项目:国家重点基础研究发展计划资助项目(A2720060294)。
时间:2015-10-23
网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20151023.1101.002.html
10.7652/xjtuxb201601009
O35
A
0253-987X(2016)01-0053-06
