新型非奇异终端滑模观测器的永磁同步电机无传感器控制
2016-12-21常雪剑彭博刘凌高琳
常雪剑,彭博,刘凌,高琳
(西安交通大学电气工程学院,710049,西安)
新型非奇异终端滑模观测器的永磁同步电机无传感器控制
常雪剑,彭博,刘凌,高琳
(西安交通大学电气工程学院,710049,西安)
为了实现对永磁同步电机无位置矢量控制系统所需的转子位置和速度的准确估计,提出一种基于跟踪微分器的新型非奇异快速终端滑模观测器(NFTSMO)。首先,构建积分型非奇异快速终端滑模面,使电流观测误差在有限时间内快速收敛到零,避免了终端滑模存在的奇异问题及传统非奇异终端滑模面中微分状态带来的噪声;然后,结合具有终端吸引子的低抖振切换控制设计滑模控制律,经过跟踪微分器获得平滑的反电动势估算值,减小了传统滑模观测器中低通滤波器引起的相位滞后;最后,基于锁相环原理,从观测的反电动势中调制出转子位置和速度信息。仿真结果表明,采用文中提出的新型滑模观测器可以实现对永磁同步电机转速的准确估计,转速最大估计误差在±1 r/min之间,且估计的转子位置无相位滞后,误差小,系统动、静态响应好。与传统滑模观测器相比,该新型滑模观测器具有收敛速度更快、跟踪精度更高、反电动势抖振更小的特点,当系统存在负载扰动及参数摄动时,仍然能够准确地估算出电机转子的位置和速度,具有较强的鲁棒性。
永磁同步电机;滑模观测器;终端滑模控制;无传感器控制;跟踪微分器
永磁同步电机(permanent magnet synchronous motor,PMSM)具有体积小、功率密度高、转动惯量低、高效节能等优点,被广泛应用于航空航天、电动汽车、智能机器人等工业领域。对于PMSM控制系统,转子位置和速度的准确获取是电机稳定快速运行的关键。通常采用旋转变压器、光电编码器等机械位置传感器获取转子信息,但是它们占用空间大,成本高,增加了轴承的惯量,特别是在一些特殊场合及环境下,使用受到限制。因此,电机无传感器控制策略将会是今后电机控制发展的趋势。
无传感器控制技术通过检测有关的电信号作为无位置控制器的输入,采用一些控制算法实现转子位置和速度的估算,省却了机械传感器对转子信息的检测。目前,PMSM无位置控制的方法主要有:模型参考自适应法[1];高频注入法[2];神经网络法[3];基于LMI的方法[4];滑模观测器法[5];等。其中,滑模观测器以测量的定子电压、电流作为输入信号,根据定子电流的观测误差构成滑模面,根据误差不断地变化结构,迫使系统沿着规定的滑动模态运动,使电流观测误差收敛到0,得到反电动势的估算值,再由反电动势获得转子位置及速度。由于滑动模态的设计与系统的参数和扰动无关,因而响应速度快,对于内部参数摄动及外部扰动具有强鲁棒性,且物理实现简单,可有效应用于中、高速PMSM转子信息的估算[6-7]。但是,滑模控制由于开关函数的不连续性会造成系统的高频抖振。文献[8]采用边界层可变的饱和函数削弱了永磁同步电机调速系统中速度环滑模控制律的抖振,同时保证了控制精度。文献[9]采用两级低通滤波器对反电动势进行滤波,但是如果滤波器的截止频率太高,则滤波效果不明显,而如果截止频率太低,反电动势又会存在大的相位滞后,所以需要对转子位置进行相位补偿。文献[10]设计了一种将Sigmoid函数与反电动势观测器相结合的方法来削弱抖振,提高了滑模观测器的观测性能。文献[11]提出了一种高阶非奇异终端滑模观测器,通过积分得到较为平滑的反电动势,避免了低通滤波器引起的相位滞后,但其控制器需要检测电流的微分信号,而实测信号的微分值一般难以获取。文献[12]采用正弦型饱和函数替代开关函数来抑制抖振,得到的反电动势谐波幅值小,转速及转子位置的观测精度优于初等饱和函数。
本文基于终端滑模理论和跟踪微分器,提出一种新型非奇异快速终端滑模观测器(nonsingular fast terminal sliding mode observer,简称NFTSMO)。采用新型非奇异快速终端滑模面,实现系统状态的快速收敛;结合具有终端吸引子的切换控制设计控制律,控制律经过快速跟踪微分器实现对反电动势的准确快速跟踪,且由于跟踪微分器的积分特性,可滤除反电动势的高频噪声,得到光滑的反电动势;最后根据锁相环获得转子位置与速度,观测器的稳定性由Lyapunov函数保证。经仿真结果验证,与传统滑模观测器相比,本文所采用的方法提高了转子位置和速度的观测精度。
1 传统滑模观测器
表贴式永磁同步电机在α-β两相静止坐标系下的状态方程为
(1)
式中:iα、iβ、uα、uβ分别为α、β两相的定子电流和电压;Rs为定子电阻;L为定子绕组α、β轴的等效电感;eα、eβ为α、β两相的反电动势,表达式为
(2)
式中:Ψf为转子磁链;ωe为转子电角速度;θe为转子位置电角度。由式(2)可提取电机转子位置和速度信息。
根据式(1)可构建PMSM滑模观测器
(3)

由式(3)减式(1)得到定子电流误差系统
(4)

式(4)可变换成
(5)


(6)
传统滑模观测器的控制律为
v=[vαvβ]T=[-ksgnsα-ksgnsβ]T
(7)
式中:k为切换增益,且k>max(|eα|,|eβ|)。

e=-v=ksgns
(8)
式中:sgns=[sgnsαsgnsβ]T。
式(8)中含有非线性切换函数,将引起系统的高频抖振。为了减小抖振,传统滑模采用饱和函数替代符号函数。饱和函数为
(9)
式中:δ为边界层。当δ较大时,电流观测误差较大;当δ较小时,控制律抖振较大。一般取0.2≤δ≤0.5。
由于在边界层内饱和函数是连续的线性函数,所以通过调节边界层δ的大小,可适当地削弱抖振。但是,系统仍存在由于采样噪声和逆变器开关器件的开关工作频率引起的电流脉动,反电动势抖振现象仍很剧烈。传统滑模观测器将式(8)表示的电动势信号通过一阶低通滤波器来滤除其中的高频信号,以获取抖振较小的反电动势估计值,即
(10)
(11)

2 新型非奇异快速终端滑模观测器设计
为了准确估计PMSM的转子位置和速度,本文提出一种基于跟踪微分器的非奇异快速终端滑模观测器,通过将基于终端滑模理论的控制律与跟踪微分器相结合,可削弱系统的抖振,减小低通滤波器产生的估计误差。
2.1 非奇异快速终端滑模面
(12)

(13)
(14)
将式(13)变换为
(15)

2.2 反电动势的估算
为了获取反电动势,先要求出观测器的滑模控制律v。滑模控制律通常由等效控制veq和切换控制vsw组成。等效控制用以控制系统的确定部分,将系统状态保持在滑模面上,切换控制则迫使系统状态在滑模面附近切换,实现对不确定性和扰动的鲁棒控制。针对式(5)所示的电流误差系统,选取滑模面(12),设计如下控制律
(16)

为了保证系统的稳定性,选取Lyapunov函数
V=(1/2)sTs
(17)
对V求导,有
1/LsT(e-k|s|γsgns-ηs)=
1/L(sαeα+sβeβ-k|sα|1+γ-k|sβ|1+γ-
(18)

为了进一步减小高频噪声,通过跟踪微分器实现对反电动势的精确跟踪,同时实现滤波功能,本文设计了含终端吸引子的低抖振快速跟踪微分器
(19)
结合跟踪微分器的新型非奇异快速终端滑模观测器(NFTSMO)的结构如图1所示。

图1 NFTSMO的结构简图
2.3 转子位置与速度的估算
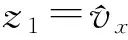
为了求解式(11)中的转子位置估算,在数字化实现时需要反复查询反正切数值表来获取角度值,这会产生计算噪声,导致计算偏差增大。为克服这一缺点,采用锁相环原理从反电动势中调制出转子位置与速度。锁相环原理如图2所示,其中的转子速度可根据式(11)进行估算。
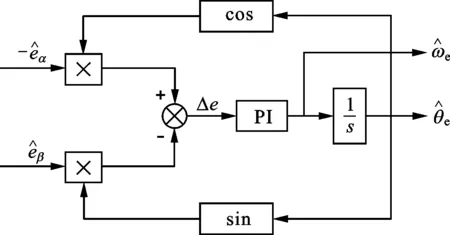
图2 锁相环(PLL)原理图
3 仿真结果与分析
采用id=0的矢量控制策略,建立基于MATLAB/Simulink的系统仿真模型,实现永磁同步电机的无位置传感器控制。永磁同步电机基于NFTSMO的调速系统拓扑图如图3所示。
仿真所采用的电机额定参数为:
PN=3 kW,UN=200 V,IN=18 A,nN=3 000 r/min,Rs=0.258 Ω,L=0.827 mH,Ψf=0.057 Wb,B=0,J=0.006 5 kg·m2,np=5。
NFTSMO的参数为:
p=10,q=10,λ=0.6,k=50,η=10,γ=0.8。
快速跟踪微分器的参数为:
R=2 500,a=100,b=100,m=1.3。
图3 NFTSMO的永磁同步电机无位置传感器矢量控制系统拓扑图
系统初始给定转速为500 r/min,带3 N·m恒负载转矩运行。在0.25 s时刻给定转速突变为1 000 r/min时,NFTSMO的仿真结果如图4~图8所示,采用传统滑模观测器且不加转子位置补偿的仿真结果如图9~图12所示。

(a)滤波前α轴滑模观测器控制律
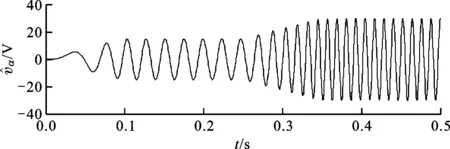
(b)滤波后α轴滑模观测器控制律图4 跟踪微分器滤波效果图
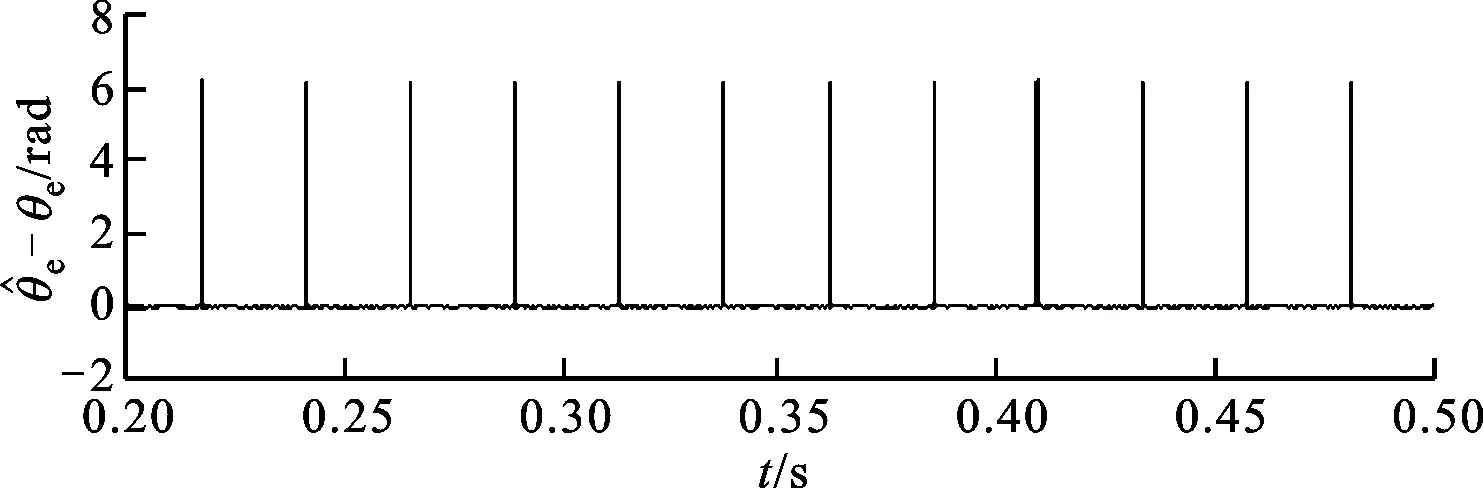
由图4、图5可知,低抖振快速跟踪微分器能够快速、准确地跟踪控制律,使NFTSMO得到光滑的反电动势估计值。由图6~图8可以观察到,采用NFTSMO可以实现对转速的准确估计,估计误差最大在±1 r/min之间,且估计的转子位置无相位滞后,估计误差小,系统动、静态响应好。

(a)α轴反电动势估计结果
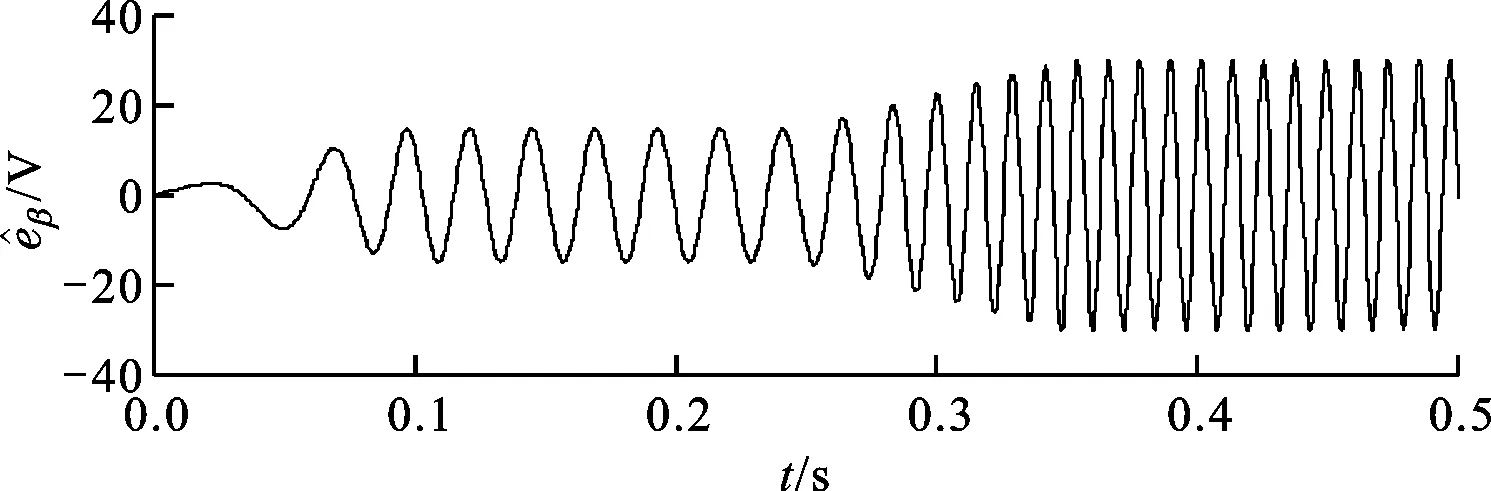
(b)β轴反电动势估计结果图5 NFTSMO的反电动势估计结果
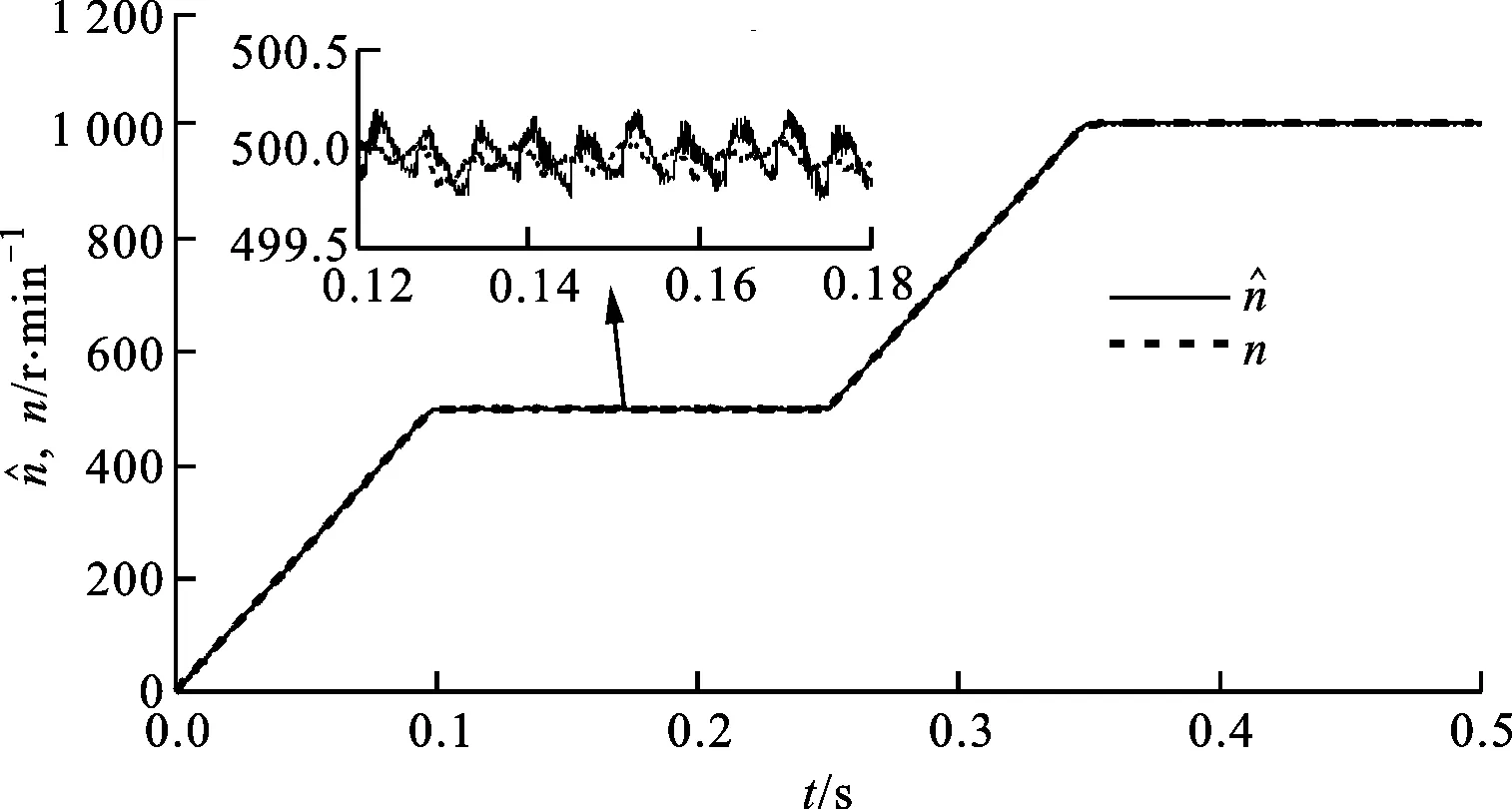
图6 NFTSMO的转速估计结果

图7 NFTSMO的转速估计误差
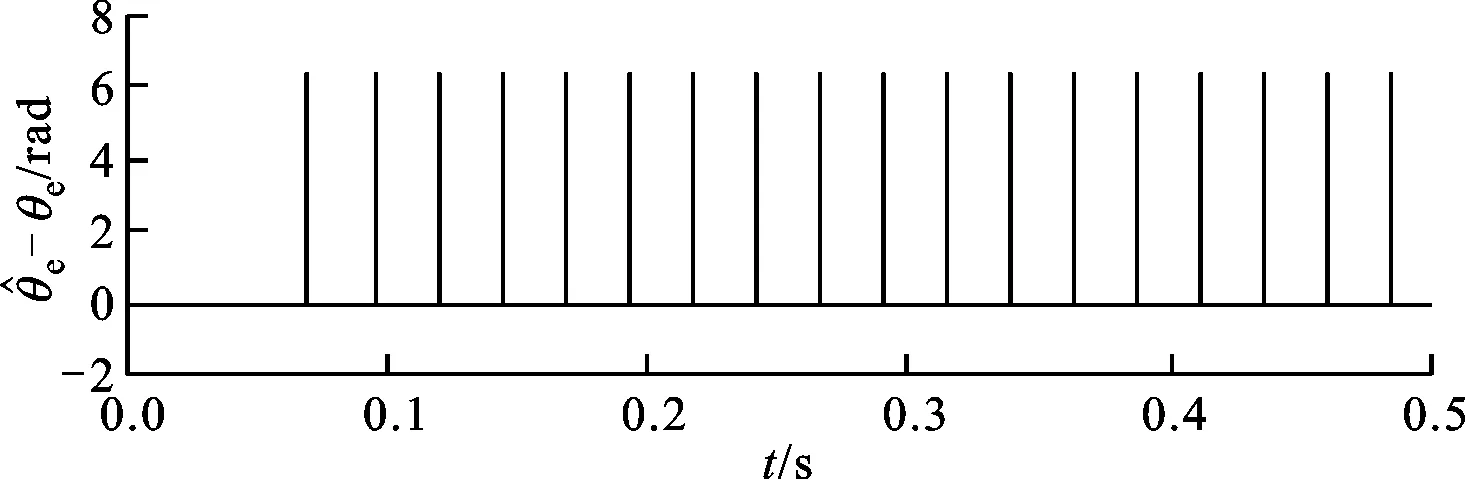
由图9~图12可见,传统滑模观测器由于采用了低通滤波器,反电动势估计值存在相位滞后,且幅值衰减,导致估计转速不能很好地跟踪实际转速,估计误差大,转速最大估计误差的绝对值达到40 r/min,估计转子位置相位滞后也较大,在非跳变时刻最大估计误差的绝对值达到1 rad,且系统动、静态性能较差。
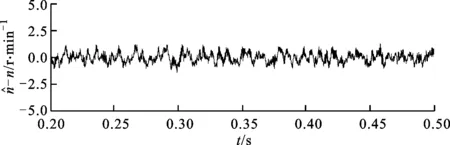
给定转速保持在500 r/min,启动转矩为3 N·m,在0.2 s负载变为7 N·m、0.35 s负载变为5 N·m时,采用NFTSMO的仿真结果如图13、图14所示。给定转速为500 r/min,带3 N·m恒定负载运行,当电机参数改变时,采用NFTSMO的仿真结果如图15、图16所示。

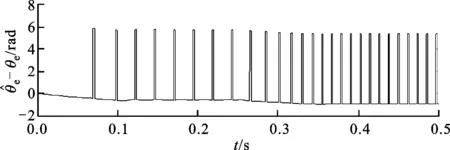
(a)转子位置估计结果
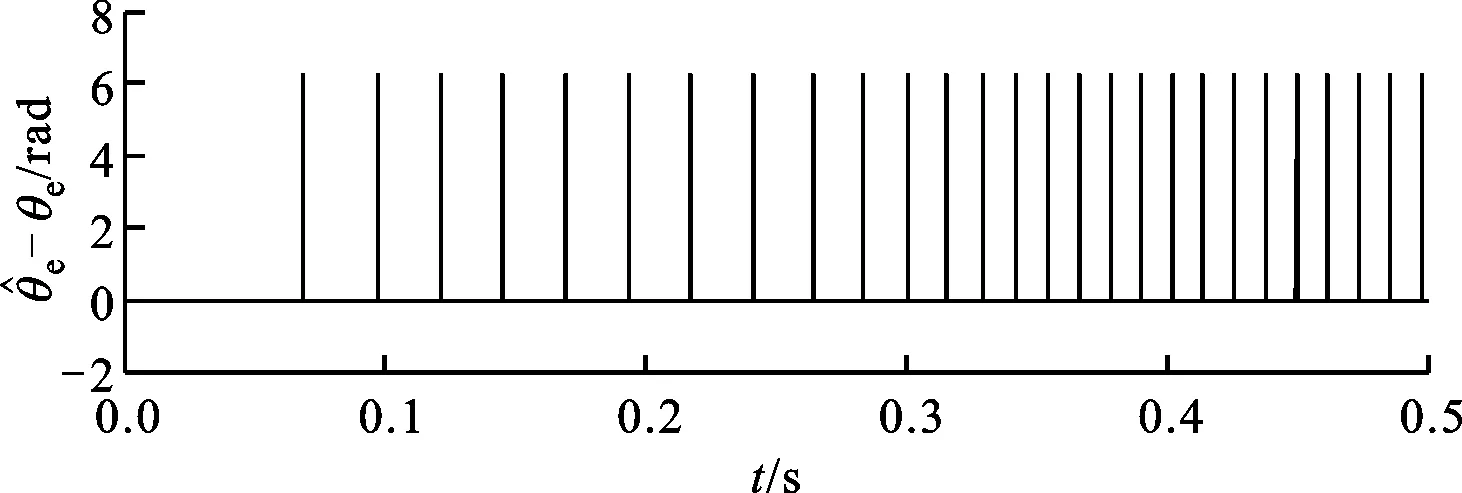
(b)转子位置估计误差图8 NFTSMO的转子位置估计结果及估计误差
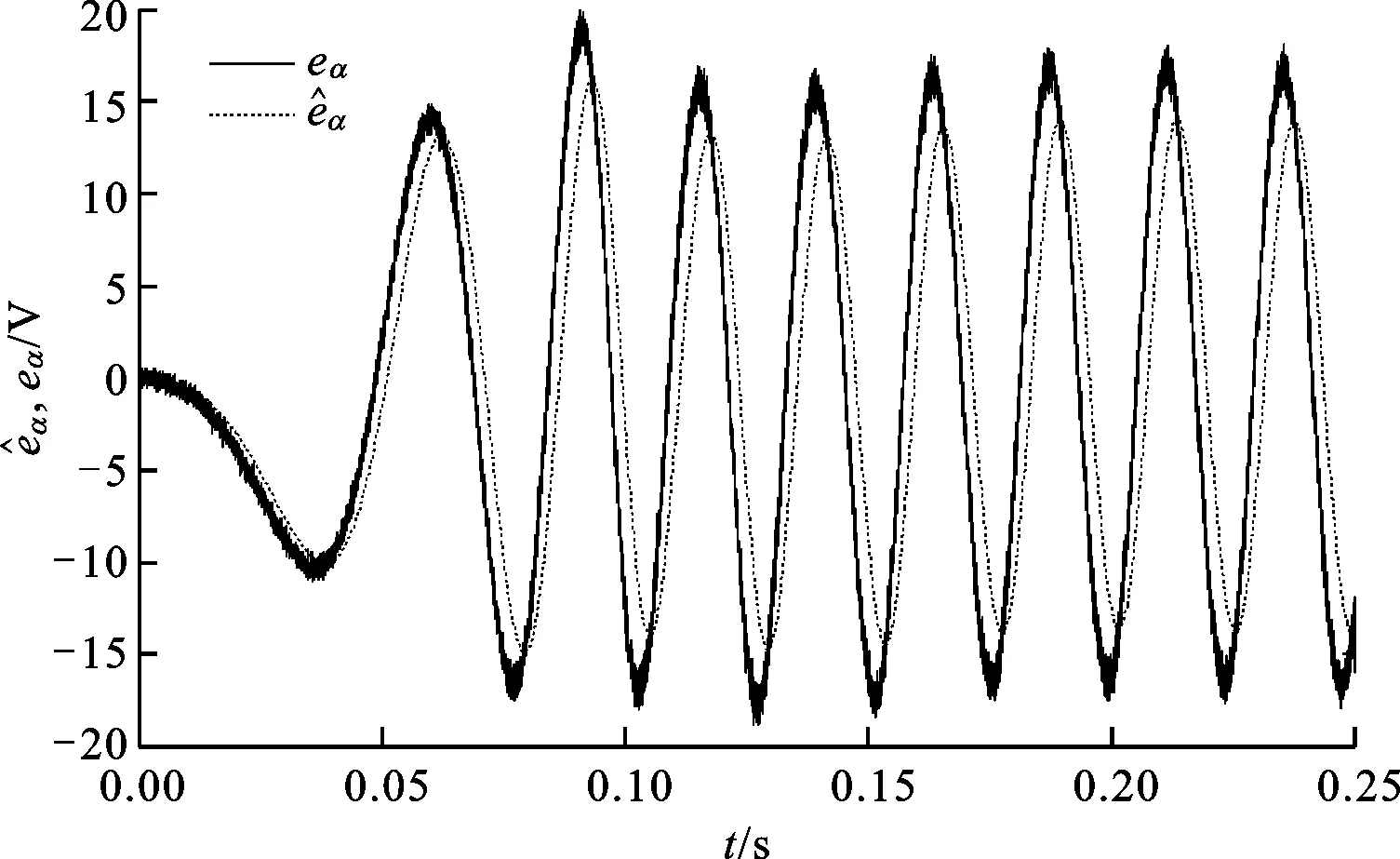
图9 传统滑模观测器的反电动势估计结果

图10 传统滑模观测器的转速估计结果
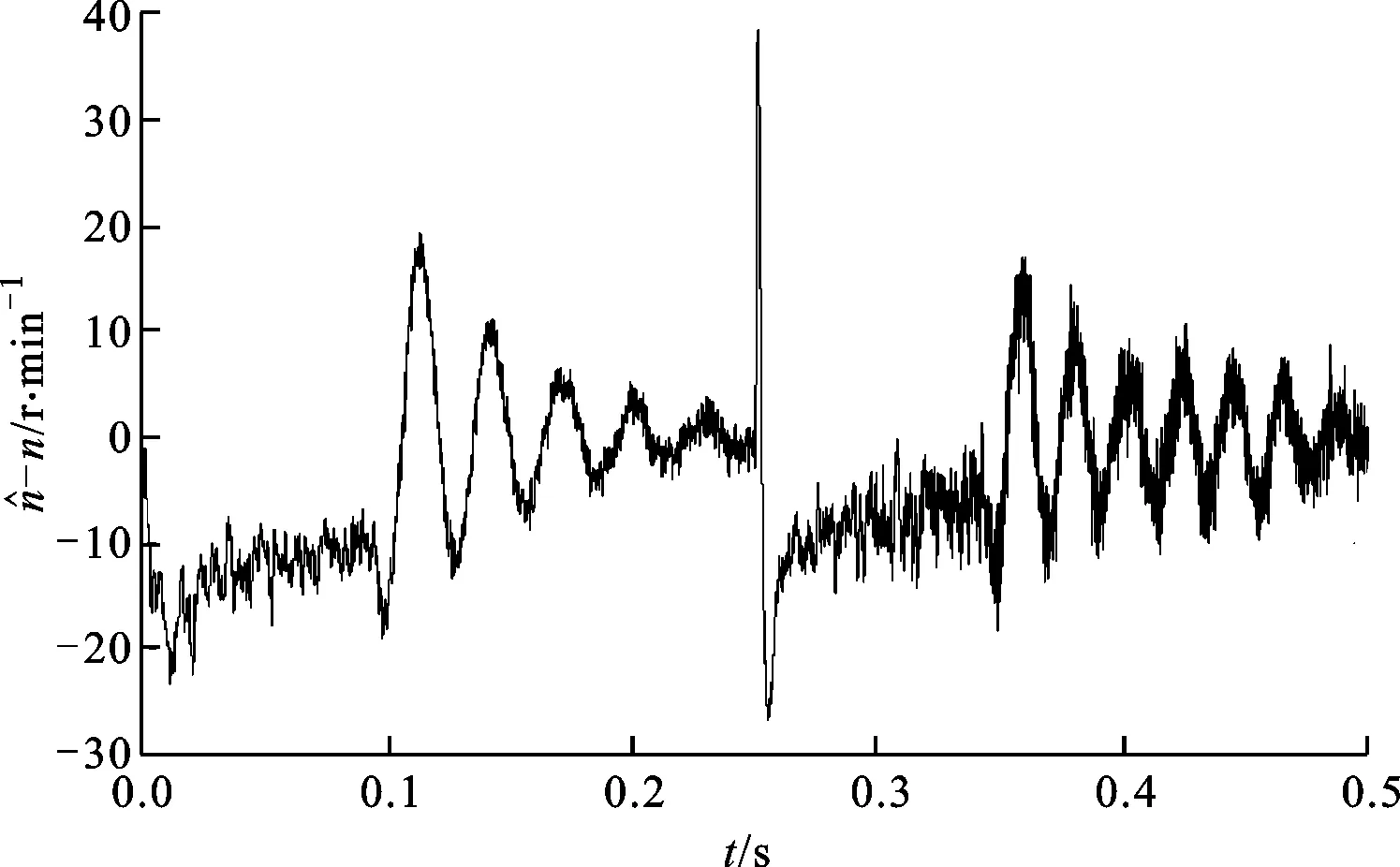
图11 传统滑模观测器的转速估计误差

(a)转子位置估计结果
(b)转子位置估计误差图12 传统滑模观测器的转子位置估计结果及估计误差
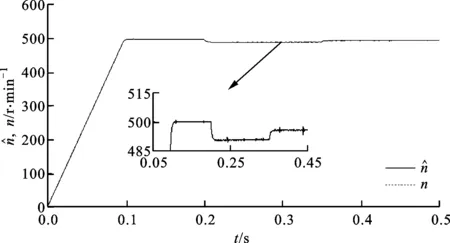
图13 变载时NFTSMO的转速估计结果

(a)转速估计误差
(b)转子位置估计误差 图14 变载时NFTSMO的转速估计误差与转子位置估计误差
(a)转速估计误差
(b)转子位置估计误差 图15 电阻为1.5Rs时NFTSMO的转速估计误差与转子位置估计误差
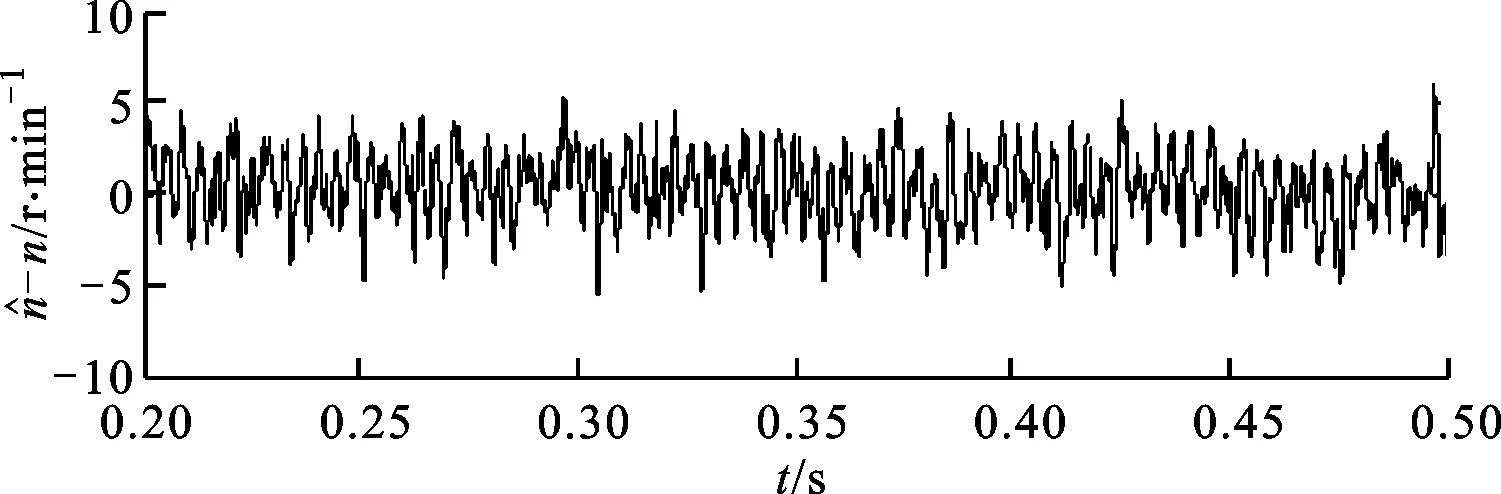
(a)转速估计误差

(b)转子位置估计误差 图16 电感为1.5L时NFTSMO的转速估计误差与转子位置估计误差
由图13~图16可见,当系统存在负载扰动及参数摄动时,本文所设计的新型非奇异快速终端滑模观测器仍然能够准确地估算出电机转子的位置和速度,系统仍然能够正常运行,具有较好的鲁棒性。
4 结 论
本文针对永磁同步电机无位置矢量控制系统,采用新型非奇异快速终端滑模面及具有终端吸引子的切换控制设计滑模控制律,控制律经过微分跟踪器滤波得到光滑的反电动势估计值,通过锁相环从观测的反电动势中调制出转子位置与速度的估计值。仿真结果表明,本文所提出的新型非奇异快速终端滑模观测器(NFTSMO)与传统滑模观测器相比,具有收敛速度快、跟踪精度高、反电动势抖振小的优点,且对于负载扰动及参数摄动都具有较强的鲁棒性,系统稳定性能好。
[1] 齐放, 邓智泉, 仇志坚, 等. 基于MRAS的永磁同步电机无速度传感器 [J]. 电工技术学报, 2007, 22(4): 53-58. QI Fang, DENG Zhiquan, QIU Zhijian, et al. Sensorless technology of permanent magnet synchronous motors based on MRAS [J]. Transactions of China Electrotechnical Society, 2007, 22(4): 53-58.
[2] 秦峰, 贺益康, 刘毅, 等. 两种高频信号注入法的无传感器运行研究 [J]. 中国电机工程学报, 2005, 25(5): 116-121. QIN Feng, HE Yikang, LIU Yi, et al. Comparative investigation of sensorless control with two high-frequency signal injection schemes [J]. Proceedings of the CSEE, 2005, 25(5): 116-121.
[3] 李鸿儒, 顾树生. 基于神经网络的PMSM速度和位置自适应观测器的设计 [J]. 中国电机工程学报, 2002, 22(12): 32-35. LI Hongru, GU Shusheng. Neural-network-based adaptive observer of position and speed of PMSM [J]. Proceedings of the CSEE, 2002, 22(12): 32-35.
[4] LIAN K Y, CHIANG C H, TU H W. LMI-based sensorless control of permanent-magnet synchronous motors [J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2769-2778.
[5] KIM H, SON J, LEE J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM [J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4069-4077.
[6] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展 [J]. 控制理论与应用, 2007, 24(3): 407-418. LIU Jinkun, SUN Fuchun. Research and development on theory and algorithms of sliding mode control [J]. Control Theory & Applications, 2007, 24(3): 407-418.
[7] LIU Ling, DING Wen, LIU Chongxin, et al. Hyperchaotic synchronization of fractional-order arbitrary dimensional dynamical systems via modified sliding mode control [J]. Nonlinear Dynamics, 2014, 76(4): 2059-2071.
[8] 常雪剑, 刘凌, 崔荣鑫. 永磁同步电机非奇异快速终端可变边界层滑模控制 [J]. 西安交通大学学报, 2015, 49(6): 53-59. CHANG Xuejian, LIU Ling, CUI Rongxin. A nonsingular fast terminal sliding mode controller with varying boundary layers for permanent magnet synchronous motors [J]. Journal of Xi’an Jiaotong University, 2015, 49(6): 53-59.
[9] 丁文, 梁得亮, 罗战强. 两级滤波滑模观测器的永磁同步电机无位置传感器控制 [J]. 电机与控制学报, 2012, 16(11): 1-10.
DING Wen, LIANG Deliang, LUO Zhanqiang. Position sensorless control of PMSM using sliding mode observer with two-stage filter [J]. Electric Machines and Control, 2012, 16(11): 1-10.
[10]QIAO Zhaowei, SHI Tingna, WANG Yindong, et al. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor [J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 710-719.
[11]FENG Yong, ZHENG Jianfei, YU Xinghuo, et al. Hybrid terminal sliding-mode observer design method for a permanent-magnet synchronous motor control system [J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3424-3431.
[12]陆婋泉, 林鹤云, 冯奕, 等. 永磁同步电机无传感器控制的软开关滑模观测器 [J]. 电工技术学报, 2015, 30(2): 106-113. LU Xiaoquan, LIN Heyun, FENG Yi, et al. Soft switching sliding mode observer for PMSM sensorless control [J]. Transactions of China Electrotechnical Society, 2015, 30(2): 106-113.
[本刊相关文献链接]
张蕾,张爱民,景军锋,等.静止无功补偿器与发电机励磁系统的自适应鲁棒协调控制策略.2015,49(11):96-101.[doi:10.7652/xjtuxb201511016]
李彪,李黎川.新型磁链观测算法及其在永磁同步电机无位置传感器控制中的应用.2015,49(11):102-109.[doi:10.7652/xjtuxb201511017]
常雪剑,刘凌,崔荣鑫.永磁同步电机非奇异快速终端可变边界层滑模控制.2015,49(6):53-59.[doi:10.7652/xjtuxb 201506009]
郝双晖,王磊,宋宝玉,等.交流伺服系统永磁同步电机电流及位置二级状态观测器设计.2015,49(5):100-107.[doi:10.7652/xjtuxb201505016]
郭伟,王跃,李宁.永磁同步电机飞轮储能系统充放电控制策略.2014,48(10):60-65.[doi:10.7652/xjtuxb201410010]
丁树业,刘书齐,毕刘新,等.矢量控制下永磁同步电机的损耗分析.2013,47(12):95-101.[doi:10.7652/xjtuxb201312 017]
续丹,包鑫,霍小宁,等.永磁同步电机宽速域无位置传感器控制.2013,47(9):60-64.[doi:10.7652/xjtuxb201309010]
罗战强,梁得亮,丁文.双余度稀土永磁无刷伺服系统的控制策略.2012,46(12):66-73.[doi:10.7652/xjtuxb201212012]
(编辑 葛赵青)
A Novel Nonsingular Terminal Sliding Mode Observer for Sensorless Control of Permanent Magnet Synchronous Motor
CHANG Xuejian,PENG Bo,LIU Ling,GAO Lin
(School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
Aiming at the accurate estimation of rotor position and speed of permanent magnet synchronous motor for the sensorless vector control system, a novel nonsingular fast terminal sliding mode observer based on tracking differentiator, named NFTSMO, is proposed. First, a nonsingular fast terminal sliding mode surface in form of integration is constructed, which makes the observation error of currents converge to zero in finite time and avoids the singular problem as well as the noises produced by the conventional nonsingular terminal sliding mode surface. Then, the sliding control law is developed with low chattering switching control combined with terminal attractor. The smooth estimation of the back electromotive-force is obtained through the tracking differentiator, and the phase lag caused by the low-pass filter in traditional sliding mode observer is decreased. Finally, the information of rotor position and speed is modulated from the observed back electromotive-force by the phase-locked loop. The simulation results show that the proposed nonsingular fast terminal sliding mode observer can accurately estimate the rotor position and speed of permanent magnet synchronous motor. The maximum error of speed estimation is between ±1 r/min, and the estimated rotor position has no phase lag. The system has good dynamic and static performances. Compared with the traditional sliding mode observer, the proposed observer has advantages of faster convergence rate, higher tracking accuracy, lower chattering of back electromotive-force. Besides, the proposed observer has strong robustness in the presence of load disturbances and parameter perturbations.
permanent magnet synchronous motor; sliding mode observer; terminal sliding mode control; sensorless control; tracking differentiator
2015-06-11。 作者简介:常雪剑(1991—),女,硕士生;刘凌(通信作者),男,博士,讲师,硕士生导师。 基金项目:国家自然科学基金资助项目(51307130);中央高校基本科研业务费专项资金资助项目(1191320056)。
时间:2015-11-03
网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20151103.1744.002.html
10.7652/xjtuxb201601014
TM301
A
0253-987X(2016)01-0085-07
