无人机伞降回收系统设计与实现
2016-12-20刘靖
刘 靖
(解放军92419部队,辽宁兴城 125106)
无人机伞降回收系统设计与实现
刘 靖
(解放军92419部队,辽宁兴城 125106)
对无人机伞降回收系统的组成及工作原理进行研究,在此基础上依据无人机总体要求对回收系统进行详细设计,综合考虑系统开伞动载、稳降速度及回收减震等要求,系统采用减速伞引导、主伞收口及减震气囊缓冲的回收方式,通过仿真分析及实际飞行试验验证,系统设计合理可行,满足无人机回收要求。
无人机;伞降回收;飞行试验
目前降落伞已广泛应用于无人机的回收,用降落伞回收无人机具有操作简单的优点,接到回收指令,无人机从飞行状态到安全着陆,整个过程自动完成,对操作人员要求低。此外,降落伞回收对场地要求低,无需跑道,适用于野外条件。无人机降落伞回收系统一般包括:回收伞、着陆缓冲装置、触地开关和伞-机分离机构。回收伞一般由减速伞、主伞及悬挂带组成[1],小型回收伞采用引导伞直接拉主伞的程序。对无人机来说,应尽量减小回收时的着陆速度以减少无人机的损伤,考虑到回收系统的可行性和经济性,通常要求无人机以6~7m/s的垂直速度落地[2],这项指标主要靠主伞的大阻力面来保证。常用的主伞伞型有锥形伞、波环伞及底边延伸型伞等,均由密织物材料作伞衣,具有较好的阻力特性,为了减轻无人机损伤,通常要辅以着陆缓冲机构,使无人机着陆时承受的冲击进一步减小。
1 伞降回收系统组成
无人机回收系统由引导伞、引导伞连接绳、伞包、主伞连接绳、主伞、吊带组件、抛伞卷布、装伞提袋等组成。当无人机进入回收前,保持迎风直线水平飞行,关闭发动机。回收指令发出后,伞舱盖打开弹起,引导伞在抛伞卷布的引导下被气流吹起充满。引导伞产生的阻力将伞包从伞舱内拉出并拉直上、下连接带。拉直上、下连接带时,伞包打开,随之拉直伞绳,拉出伞衣,伞衣迎气流充气、张满,稳定下降。伞舱盖打开弹起时打开气囊舱以及气囊充气阀门,使气囊充气。在无人机着地瞬间,分离接头工作,使上、下连接带分离,伞衣与无人机脱离,避免伞拖曳无人机致使其受损,此时气囊与地面接触,无人机靠气囊减震[3]。开伞后,引导伞、引导伞连接绳、伞包系留在伞衣顶上,以利于伞系统的回收和再次使用。无人机回收工作原理如图1所示。
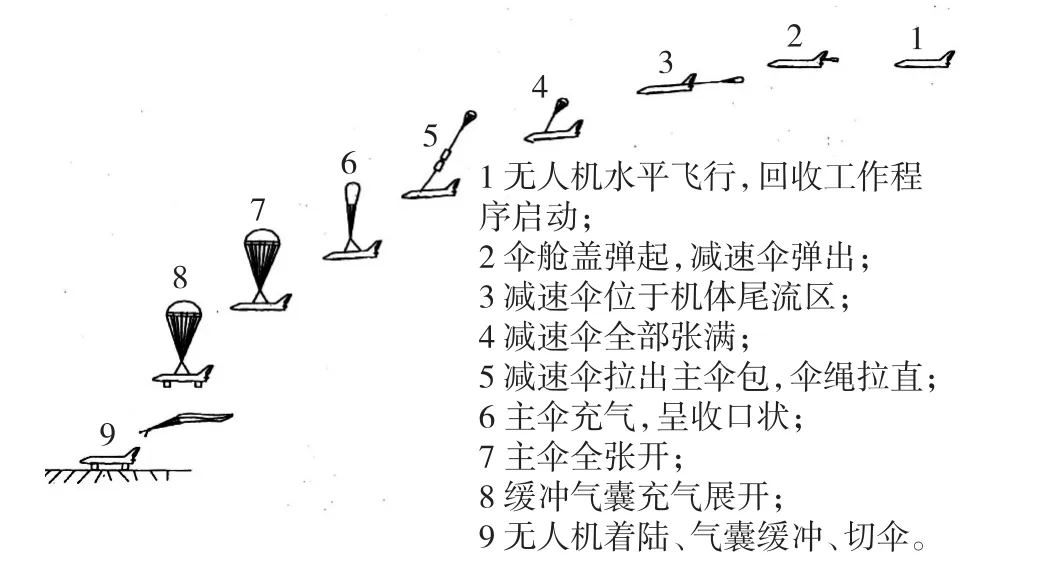
图1 无人机回收工作原理
2 系统设计
2.1 主伞
主伞主要用于无人机减速,无人机以100m/s速度开伞,考虑到三锥形伞结构稳定、摆角小、阻力系数大等优点,本设计采用三锥形伞,伞结构如图2所示。
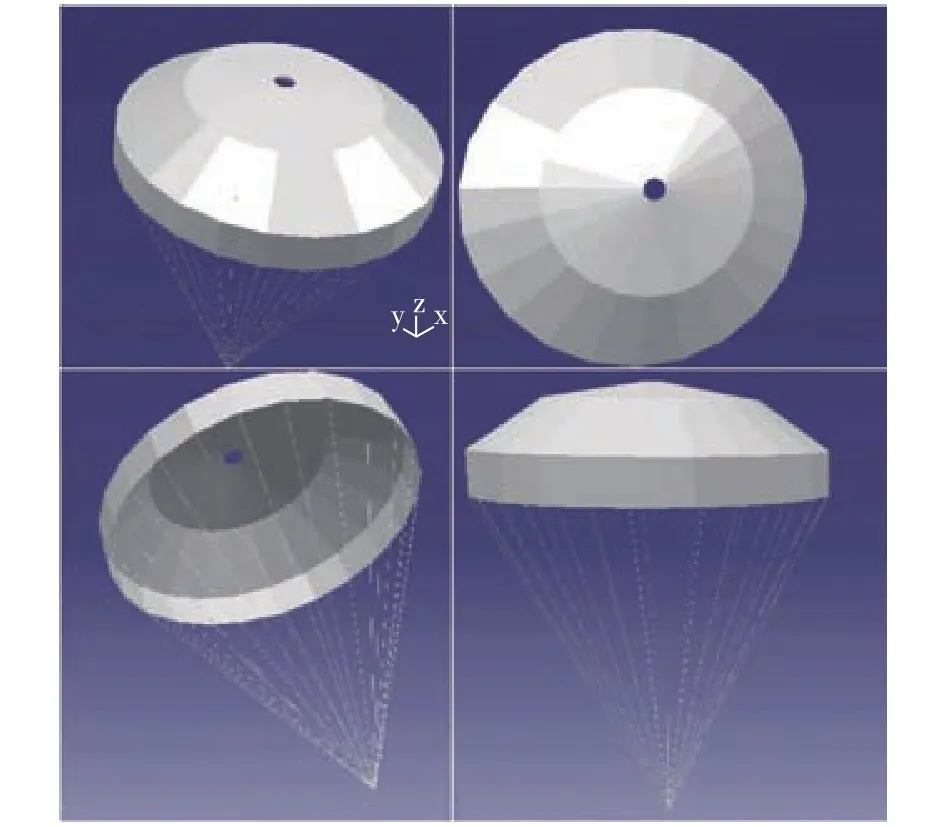
图2 三锥形伞结构示意图
盘缝带的阻力系数是0.8-0.96,设计时初步取0.8,无人机回收质量为100kg,无人机规范要求落地速度需小于7m/s,考虑到无人机采用的是涡喷发动机,为了减小落地时对发动机的震动伤害,本设计着陆速度取6.5m/s,并采用气囊进行减震。
根据稳降阶段动力学模型,物伞系统重力与伞的阻力平衡,故而有

式中,Vz为系统着陆速度,取6.5m/s;ρ0为海平面空气密度,为1.225kg/m3,计算得到伞衣阻力特征面积(CA)s=37.87m2,伞衣阻力系数cs取0.8,得到伞衣面积:
主伞面积取48m2,计算得到稳降速度:Vz=
最大开伞动载计算采用如下公式[4]:
式中,Vl=100m/s,(CA)s=Cs×As,Δ为200m高度处相对空气密度,为0.98093,K取0.008,计算得到开伞最大动载Fmax=11983.44N,由于动载太大,因此要采用收口或者2级减速,考虑到开伞高度以及伞的体积和重量等方面的因素,本设计采用收口。
2.2 收口比的确定
收口比为收口绳长度与伞衣底边长度之比,以往经验证明,在大面积降落伞的伞衣底边采用合适的收口比,使主伞分两次充气张满,在开伞速度相同时,其最大开伞动载与一次充气张满相比,很大程度上可减小开伞动载。经过反复迭代计算,取收口面积比5%[5]。
2.3 引导伞
引导伞功用是将伞包从伞舱内拉出,并使主伞系统拉直。考虑设计裕度,提高伞系统拉直的可靠性,设计取引导伞面积为0.49m2,结构为正四边形,伞绳8根。
2.4 伞包
伞包的功用是将主伞衣、伞绳及部分上连接带包装起来,以保证开伞程序和包装后的体积要求。为了提高开伞可靠性,系统采用倒拉开伞,伞包方案为半封口式伞包,伞衣底边及部分约束于伞包,其余折叠包装在伞舱内。
2.5 吊带
吊带起连接作用,是回收伞与无人机之间的连接装置,由上连接带和下连接带组成。上连接带一端与主伞相套结,另一端与脱离锁相连;下连接带一端与脱离锁相连,另一端与飞机连接。
2.6 气囊
气囊用于无人机落地时减震,防止无人机硬着陆。为了使无人机着陆平稳,采用双气囊,前后各一个,两个气囊容积均为100L。
3 系统仿真及结果分析
3.1 仿真模型
本设计采用倒拉法开伞,即先拉直伞绳,再把伞拉出伞包,计算模型如图3所示,其中dm为拉直的伞绳微元质量;mw+me表示回收物连同已拉出伞绳的质量;mys+mv为引导伞、伞衣套连同未拉出的主伞系统的质量;Fsh为伞绳拉出阻力,主要是摩擦力。
在航迹坐标系下,无人机及已拉出伞系统的动力学方程为
拉直过程中主伞系统微元质量dm,动量方程为

在不考虑伞绳弹性的情况下,拉出微元的速度v=vw,因此拉直力可写为[6]

图3 计算模型
在航迹坐标系下引导伞及未拉出部分的动力学方程为
3.2 仿真结果及分析
根据上述模型仿真得到结果如下,图4为拉直力随时间变化曲线,从图中可以看出在0.42s时伞绳受到最大拉力为1400N;图5为开伞动载随时间变化曲线,可以看出系统在主伞一次充满、二次充满时过载较大,系统开伞最大动载为5353N,开伞过载小于6g。

图4 拉直力随时间变化曲线
图6为无人机高度——水平位移曲线,图7为高度随时间变化曲线,从图中可以看出,整个系统约在5s时速度达到稳定,此时只有竖直向下的速度,稳降速度约为6m/s。
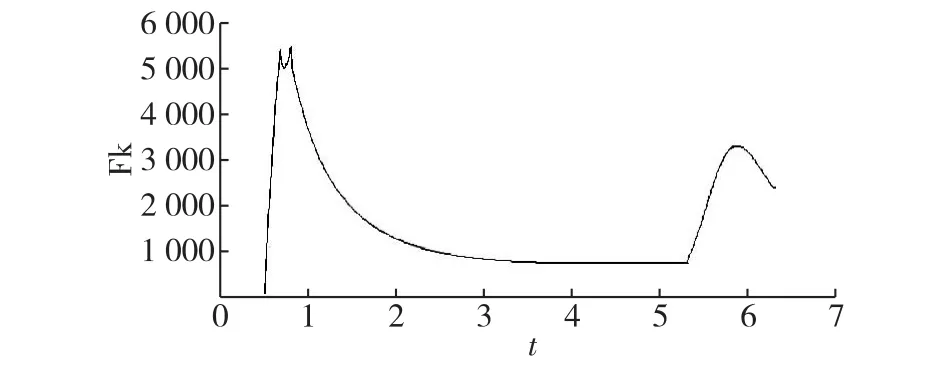
图5 开伞动载随时间变化曲线

图6 高度——水平位移曲线

图7 高度随时间变化曲线
4 系统飞行验证
基于上述设计方案,本文结合某型无人机飞行进行了实际飞行验证,飞行试验结果如下所示。图8为无人机飞行俯仰角和滚转角变化曲线,从图中可以看出,在回收初始阶段,无人机有一个大的抬头过程,俯仰角约为50°,这是由于回收伞瞬时动载突然加大导致,随后俯仰角以7s~8s为周期,在-20°~+20°之间震荡,并且振幅有减小趋势。滚转角变化规律与俯仰角变化规律基本一致,从分析可以看出,无人机摆动角基本在20°范围内,满足回收要求。
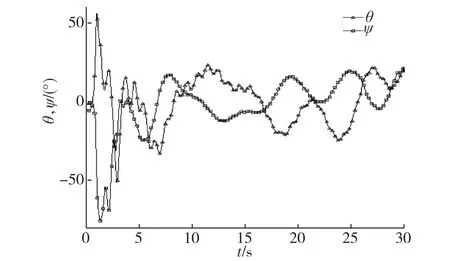
图8 无人机俯仰角、滚动角变化曲线
图9为无人机速度、高度随时间变化曲线,从图中可以看出:在初始阶段,降落伞没有完全张开,此时无人机减速较慢;当降落伞充气到一定程度,速度迅速减小,当速度约小于70m/s后无人机开始掉高,这是由于无人机最小飞行速度限制,速度在随后3s内下降到自由稳降速度,而高度下降了约20m,回收系统从开始工作到主伞二次充气张满过程时间约为5s。
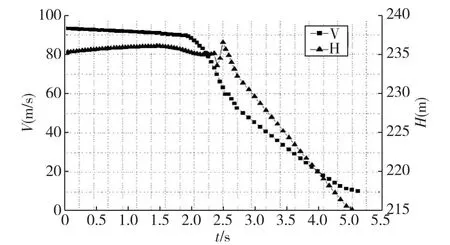
图9 无人机速度、高度随时间变化曲线
图10为无人机气压高度、GPS高度随时间变化曲线,由图中曲线可知,两种高度变化趋势基本一致,在伞绳拉直过程中,气压高度出现跳跃,这是由较大的开伞瞬时动载造成的测量误差,无人机在稳降段下降速度约为6m/s,与仿真结果基本一致,直接验证了设计的正确性。

图10 气压高度、GPS高度随时间变化曲线
从上述分析可知,该无人机回收系统主伞二次充气至张满过程时间约为5s,充气过程高度下降约20m,随后进入自由稳降阶段,稳降速度约为6m/s,此过程中无人机摆动角在20°范围内,整个降落过程时间约为40s,实际飞行结果与理论计算基本一致,系统方案设计合理可行。
5 结束语
本文首先介绍了无人机伞降回收系统的组成及工作原理,然后根据无人机总体要求对回收系统进行详细设计,为满足开伞过载及回收减震要求,最终确定系统采用主伞收口加减震气囊的回收方式,通过仿真分析及实际飞行试验验证,该系统整个回收过程约40s,回收过程摆动角在20°范围内,无人机落地速度6m/s,设计合理可行,可以保证无人机安全回收。
[1] 祝小平.无人机设计手册[M].北京:国防工业出版社,2007.
[2] 《飞机设计手册》编委会.军用飞机总体设计(飞机设计手册第四册)[M].北京:航空工业出版社,2005.
[3] 徐宏,葛义华.降落伞典型开伞过程的试验研究[J].飞行力学,2012,30(1):74⁃77.
[4] 王利荣.降落伞理论与应用[M].北京:宇航出版社,1997.
[5] 余莉.飞行器救生及生命保障技术[M].北京:国防工业出版社,2009.
[6] Toni R.A.Theory of the Dynamics of a Parachute System Undergoing its Inflation Process[J].3rd Aerodynamic Pececoration System Conference,1970.
Design and Implementation of Parachute Recovery System for Unmanned Aerial Vehicle
LIU Jing
(the Unit 92419 of PLA,Xingcheng 125106,China)
Based on studying the composition and working principle of the parachute recovery system for a certain unmanned aerial vehicle,the recovery system is detailed designed according to the general requirements of the UAV.Considering the dynamic load of opening the parachute,landing speed and recovery damping requirements,the system uses a guiding decel⁃erating parachute,the main parachute convergent technology and the damping airbag buffer.Through the simulation analysis and actual flight test validation,the system is designed to be reasonable and meet the recovery requirements.
unmanned aerial vehicle;parachute recovery;flight test
TJ765;E917
A
10.3969/j.issn.1673⁃3819.2016.06.023
1673⁃3819(2016)06⁃0109⁃04
2016⁃08⁃21
2016⁃09⁃28
刘靖(1984⁃),男,山西定襄人,硕士研究生,研究方向为飞机总体设计和气动设计。