利用曲率多特征融合改进人体三维脊椎模型特征点的标注方法
2016-12-19武君胜
惠 宇, 武君胜,鱼 滨,张 琛,武 震
(1.西北工业大学 计算机学院,陕西 西安 710072;2.西北工业大学 软件与微电子学院,陕西 西安 710072;3.西安电子科技大学 计算机学院,陕西 西安 710072)
利用曲率多特征融合改进人体三维脊椎模型特征点的标注方法
惠 宇1, 武君胜2,鱼 滨3,张 琛3,武 震2
(1.西北工业大学 计算机学院,陕西 西安 710072;2.西北工业大学 软件与微电子学院,陕西 西安 710072;3.西安电子科技大学 计算机学院,陕西 西安 710072)
由于脊椎生理结构的精准坐标描述和准确匹配尚未达到医学精度的要求, 本文对如何精确描述脊柱腰骶段特征点的物理坐标进行研究。介绍了人体脊椎采样特征点的定义和传统标记方法。针对手动标注特征点精确度不够,易产生较大误差等问题提出了一种基于曲率多特征融合的自适应标注特征点的方法。该方法首先找出某个特征点的高斯曲率和平均曲率流的定义值,得到该特征点的法曲率相对极大值,并计算在指定极小半径r范围内的所有模型点的法曲率相对极大值。由于极大值曲率越大,三维模型表面在该点处的弯曲程度越大,该点就越能表现三维模型的大致轮廓,故以r范围内极大值最大的点作为特征点的曲率描述来替换手动拾取的点,从而准确反映该点的特征变化情况。最后,对改进结果进行偏差验证分析。结果表明:改进方法的准确度比现有手动标注特征点方法的准确度提高了约37%,验证了本文方法的有效性。
脊椎;三维模型;特征点标注;曲率多特征融合;极大值曲率
1 引 言
由于人体脊椎生理结构复杂,而且考虑外科手术的自身特点,脊椎生理结构的精准坐标描述和准确匹配仍然达不到脊椎外科手术的要求。这主要是因为脊椎模型特征点的物理标记坐标太不精确,无法给临床诊断提供较为可靠的科学数据。由于脊椎结构较为复杂,镂空切面较多,三维脊椎模型的采样点标记一直是医学影像研究领域的重点和难点,而国内外在该方面的研究相对较少[1-13]。李根[2]等提出了一种基于思维进化算法的人脸特征点跟踪方法,其是通过提取人脸跟踪区域尺度不变特征变换获得整体特征模板,并确定跟踪特征点。李康[7]提出了一种基于深度图像的人脸三维模型特征点标定方法,该方法首先生成人脸三维模型的二维深度图像,然后采用SUSAN算子在该图像上标定特征点;翟凤文[8]提出将置信传播与特征点形状特征相结合来去除 SIFT 特征点的误匹配。谢易辰[9]提出了基于三维特征点空间关系的三维特征点匹配算法,这几种算法都是三维SIFT特征匹配算法的改进; 王澜[10]提出一种利用共线的标定特征点确定线阵相机内参的方法,需要通过数学建模得到线阵相机的成像模型,但上述方法均是基于模型配准时的尺度不变特征变换匹配原则,如果模型数据较大,则计算量也随之变大,根本满足不了医学研究领域对实时性的要求;韩霜[12]等提出了基于高斯曲率的模型标注方法,但不能极大程度地近似表述模型几何结构的曲率,故不能准确反映模型的局部几何特征,即方法不具备一定的自适应力。
为了弥补上述方法的不足,本文提出了一种基于曲率多特征融合的自适应标注特征点的方法,该方法可以动态调整拾取点曲率,因此最大程度地保证了特征点拾取的精确性。该方法通过高斯曲率和平均曲率流等多曲率特征,得到法曲率相对极大值,从而共同确定了曲面在某点的相对极大邻域结构特征,并通过寻找某个极小半径区域范围内曲率的相对极大值点作为该区域的特征点。
2 基于曲率多特征融合的人体三维
脊椎模型特征点标注改进方法
2.1 特征点标定
在三维图像学中,特征点是指在三维模型中,用来表征局部邻域关系及特性的,具有一定几何意义的关键三维坐标点,特征点矩阵可用来存储或者表示三维模型的几何轮廓、生理特征等属性信息。
本文根据Cootes[13]提出的标记点分类定义,并借鉴在国际上得到广泛认同的颅脑特征点标注标准MPEG-4[14](Moving Picture Experts Group)的人脸定义参数(FDP)和人体生理学脊椎特征,标记出脊椎三维特征点。图1和图2分别是在骨骼解剖学中的脊椎腰骶段的右侧面观和上面观特征点示意图[15]。

图1 脊椎腰骶段的右侧面观特征点标记图
Fig.1 Labeled graph of feature points in right lateral view of lumbosacral segment

图2 脊椎腰骶段的上面观特征点标记图
Fig.2 Labeled graph of feature points in superior aspect of lumbosacral segment
2.2 基于曲率多特征融合的特征点标注改进方法
脊椎特征点一般特指三维模型曲面上那些曲率较大的点。对于曲率较大的点,三维模型表面在这些点处的弯曲程度也较大,这些点就能最大程度地表现三维模型的大致轮廓和局部模型变化,从而准确反映该点的特征变化情况。本文首先找出某个特征点的高斯曲率和平均曲率流的定义值,从而得到该特征点的法曲率相对极大值,并计算出在指定极小半径R范围内的所有模型点的法曲率相对最大值,并以此极大值作为特征点的曲率描述来替换手动拾取的点,采用多曲率特征融合的方法,可以最大程度地保证对该点的特征变化情况的描述准确性。
2.2.1 三角网格表面的极大值曲率计算
在计算机三维图像处理中,物体的曲面结构都是由一簇网格的线性逼近值所组成的。因此,可以考虑将三角面片网格的每个顶点的度量性质看做是此点局部邻域的平均度量。
如计算图3中点xi邻域的极大曲率值,用冯洛诺伊图(Voronoi Diagram)[16]内有且仅含有一个的离散点极大值曲率来替换。

图3 冯洛诺伊图
假设kmax和kmin分别为曲面上一点处法曲率的最大值和最小值,则根据曲率定义,有:
(1)
kG=kmax·kmin.
(2)
联立式(1)和式(2),则可以求得:

(3)

(4)
其中:kG为高斯曲率值,kH为平均曲率值。
2.2.2 三角网格表面的曲率偏差参数的建立
手动标记脊椎三维模型的相同特征点时,由于人为的局限性,或多或少存有一定的拾取偏差,为了衡量这种偏差对标注结果的影响,拟对拾取偏差建立偏差参数。
假设模型上的任一特征点的真实坐标位置为P0(x0,y0,z0),手动标记该点3次,3次的坐标依次记为P1(x1,y1,z1)、P2(x2,y2,z2)和P3(x3,y3,z3),P1、P2、P3均尽可能地逼近P0,由于P1、P2、P3处于相同球面上,根据定理“任意不共线的三点确定一个圆周”,则存在一个圆周,将P1、P2、P3这3点都涵盖在内。同时,圆周直径的大小决定着P1、P2、P3逼近P0的程度,直径越小,逼近程度越高,反之,则越低。
因此,建立偏差参数,可转换为找出P1、P2、P3所确定的最小圆周直径,也就是P1、P2、P3为顶点组成的三角形,其外接圆的直径D。计算公式如下:



(5)
其中:e1、e2、e3为相对应的边长,再根据海伦公式[16]可得到三角形的面积为:

其中q=(e1+e2+e3)/2。
综上所述,ΔP1P2P3的外接圆直径为:
D=e1·e2·e3/2S.
(6)
当三点共线时,有式(7):

(7)
当有两点重合时,不妨假设P1与P2重合,即e3=0,则有式(8):
D=e1=e2.
(8)
当三点都重合时有式(9):
D=0.
(9)
外接圆直径D作为一个高斯曲率偏差的参数,其值决定了特征点的准确度,值越小,表明方法拾取的点越集中,即更加趋近于真实特征点,准确度也越高。
2.2.3 基于曲率多特征融合的人体三维脊椎模型特征点标注改进方法描述
改进方法以鼠标拾取的点pi为圆心,计算半径为r的圆周内全部特征点的Gauss曲率值KG和平均曲率值KH,如图3所示。再根据公式(3)得到点的法曲率相对极大值K。法曲率相对极大值能客观凸显曲面的局部几何特征信息。一般情况下,曲率越大,曲线拐点信息越明确,几何特征也越明显,故以K所在的特征点替换点pi。
作为模型新的特征点,利用偏差参数D来对方法优劣进行评价。
Step 1: 获得脊椎三维图像表面的结构信息facets。
Step 2:定义各个变量的曲率KG、KH和领域面积AM,边向量长度Length,角度向量Angle,并初始化。
Step 3:计算领域面积AM。通过遍历,得到模型的每一个三角面片的坐标点向量,从而可以计算出边向量以及三角面片内角度数和,调用数学计算库函数对三角面片求积得到AM。
Step 4:遍历计算模型上每个点的高斯曲率值KG。
Step 5:计算向量(e1,e2)、(e2,e0)和(e0,e1)的边向量长度Length。
Step 6:计算三角面片Δv0v1v2的法向量n_f,及其邻域三角面片的法向量n_n,依据点积公式cos=n_f*n_n,计算出n_f*n_n的点积cos,并且依据公式sin=(n_f*n_n)*ei=0,1,2,可得到sin值。调用atan2(sin,cos)函数,获得角度向量Angle。
Step 7:遍历计算模型上每个点的平均曲率值KH。
Step 8:利用公式(3)计算得到模型上每个点的法曲率极大值K。
Step 9:建立顶点ID与其ID对应的法曲率极大值map映射关系,计算r范围内的所有ID的法曲率极大值MaxK,并以此MaxK来代替鼠标拾取的点pi。
Step 10:分别对每一组特征标记点进行多次标记操作,提取每次标记的位置属性和相对应的极大法曲率值K,并利用式(6)、式(7)、(8)和(9),计算每一组的偏差参数,以便于后期的方法分析与评价。
3 结果与分析
验证实验在主频为2.8 GHz的4 GB内存双核Intel主机上进行,操作系统为Windows 7,采用MFC作为界面交互环境,需要使用第三方图像显示增强库VTK进行增强。利用以上提到的技术,开发了专门的软件用以验证该改进方法。下文中的图5、图6和图7及数据均来自于该软件。
3.1 改进方法的特征点标记
对同一脊椎图像样本,运用曲率多特征融合自适应调整方法做标记,其标记效果如图5所示。

图5 高斯曲率特征点拾取截图
拾取点为33号特征点。左下角显示的数据里,前两行为纯手工选取的特征点坐标及其曲率。后两行为经过本方法调整之后选取的特征点坐标及其曲率。
3.2 改进方法的效果评价
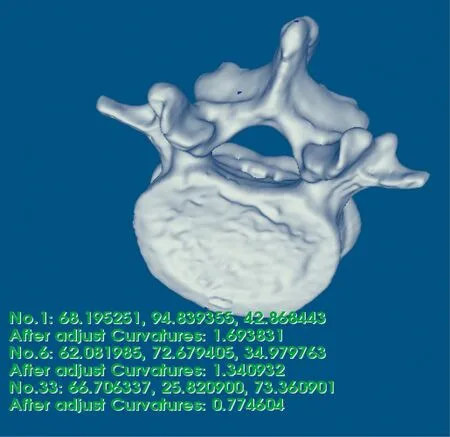
为证明方法的有效性和准确性,做了一系列改进前和改进后的仿真对比试验。选取模型基准点(No.1)、模型特征不凸出点6(No.6)、模型表面点(No.33)作为标记样本,在不同VTK绘制体面的条件下,进行采样标注。结果如图6所示。
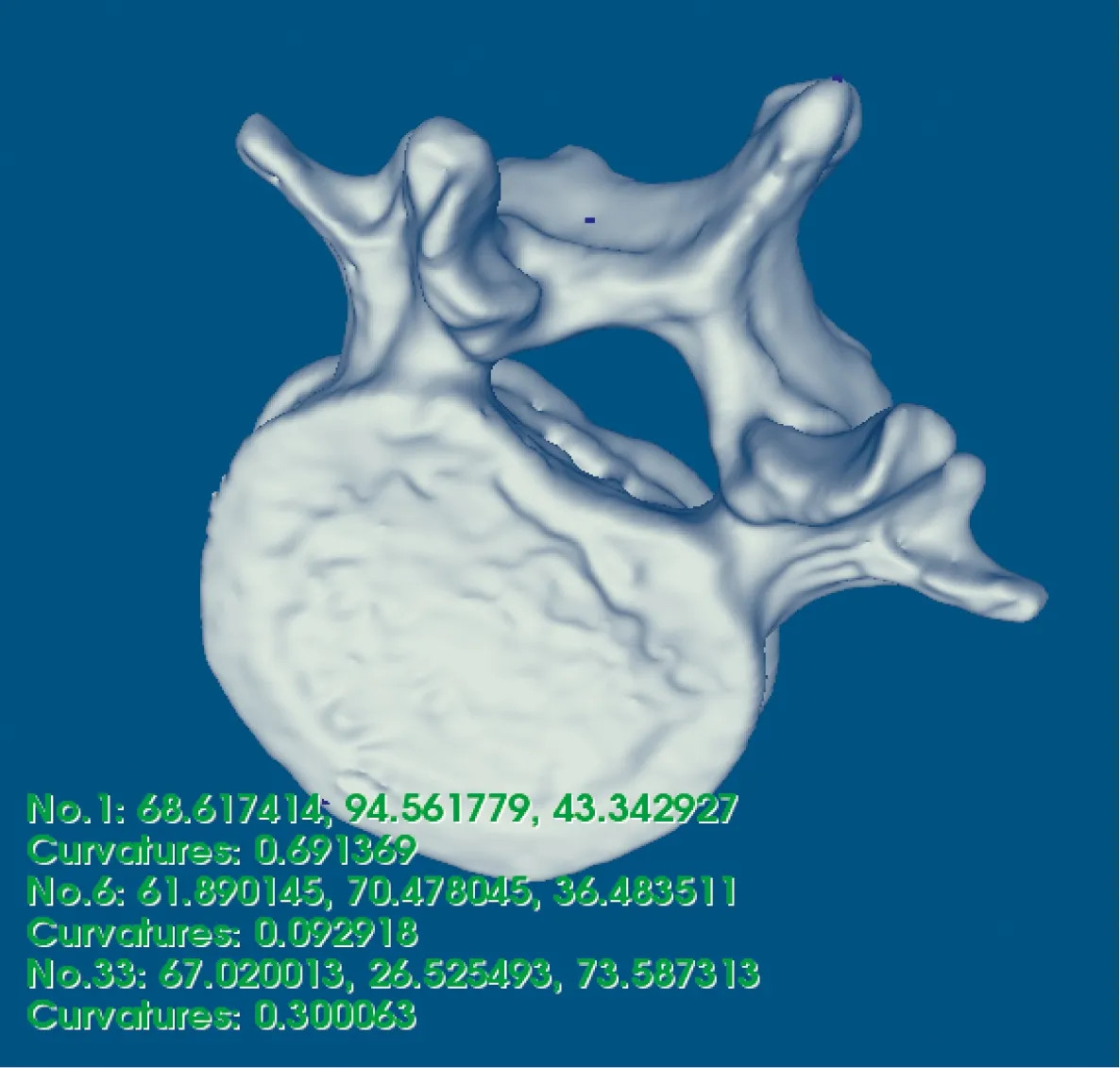
(a)右侧方位拾取
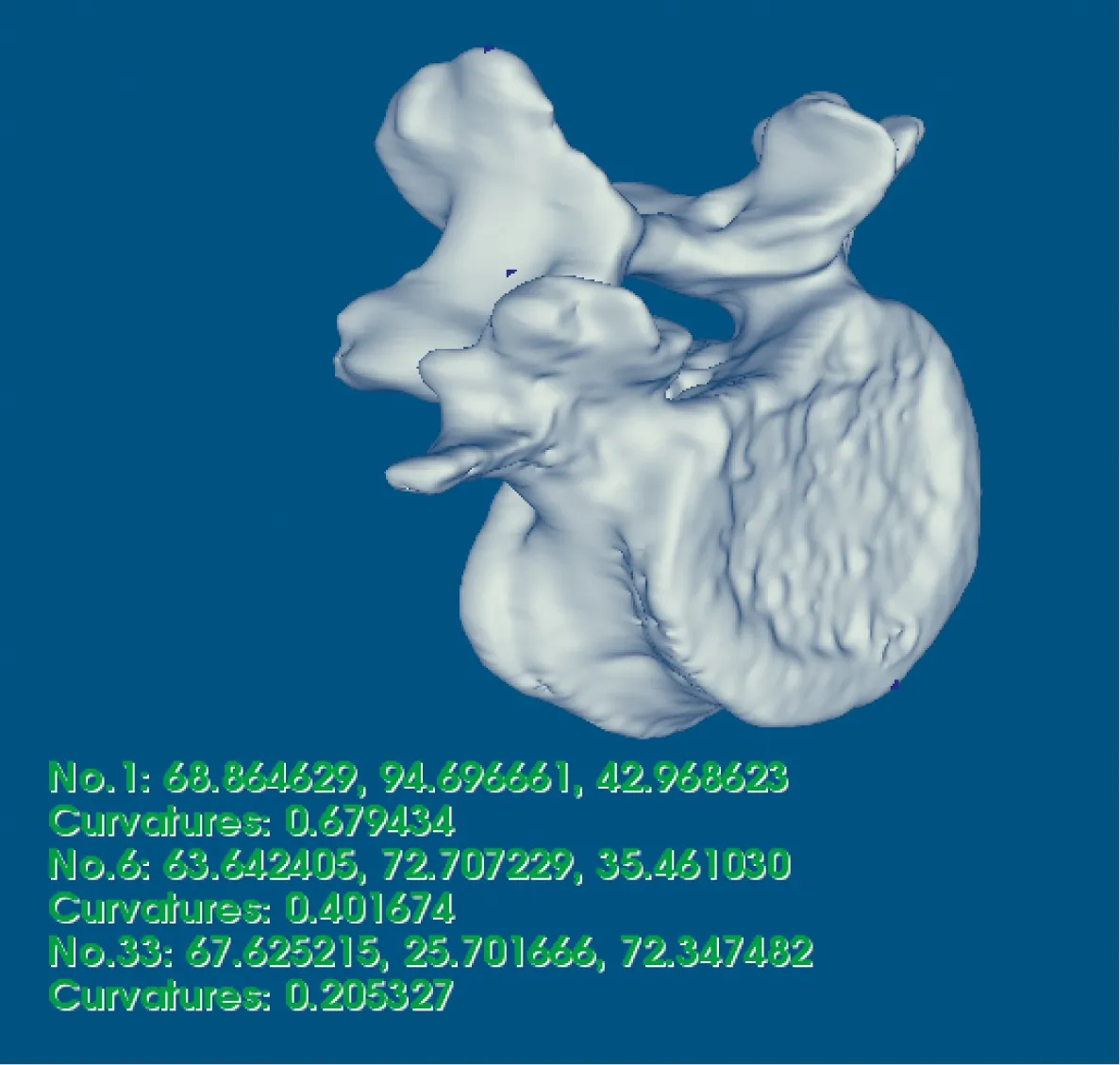
(b)左侧方位拾取

(c)俯视图方位拾取
图6为3次实验的结果图。图中显示的数据分别为对1号、6号和33号特征点进行标定的特征点坐标及其曲率。
为了更好地进行对比,利用改进前方法,分别对No.1、6、33进行鼠标标记,得到标记的三维坐标点和对应的极大值曲率Kmax,再利用式(6)~式(9),可以得到偏差参数,具体数值如表1所示。
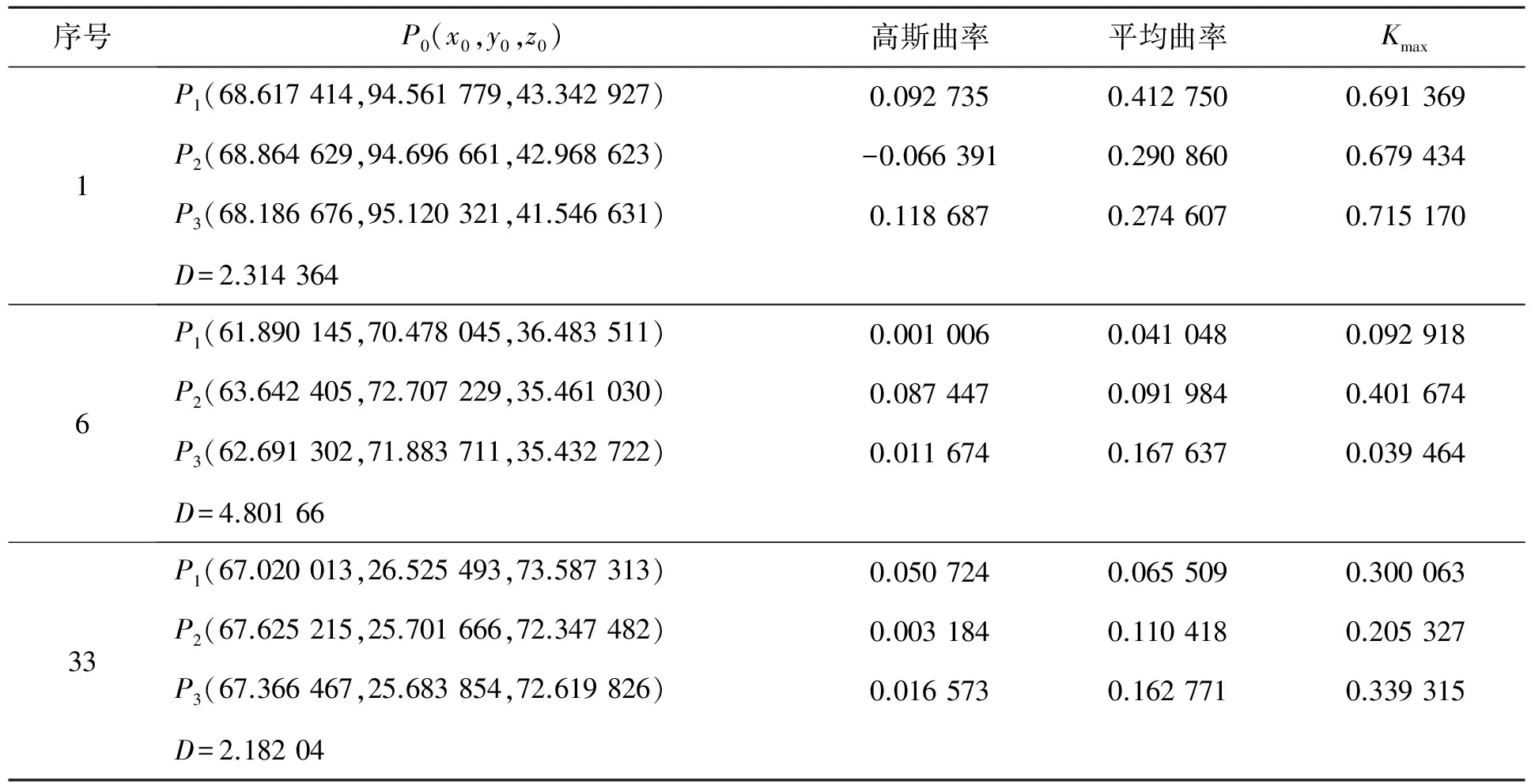
表1 改进前方法对特征点1、6、33的标注情况

由数据可以看到,对位于模型表面上的基准点(No.1),标注误差会偏小一些。相较不凸出的点(No.6),位于平滑曲面上的特征的标注误差则往往较大,拾取标注偏差也较大。
为了更好地进行对比,利用改进后方法分别对No.1、6、33号特征点进行标记,得到标记的三维坐标点和对应的极大值曲率Kmax,利用式(6)~式(9)可以得到偏差参数,具体数值如表2所示。
运用本文方法对相同标记点在同等条件下进行标记,其结果如图7所示。
(a)右侧方位拾取
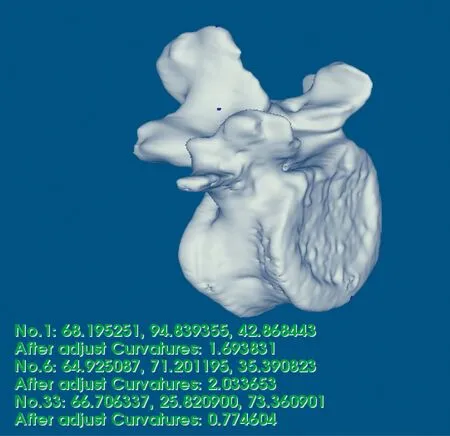
(b)左侧方位拾取

(c)俯视图方位拾取
图7中显示的数据为使用改进后方法对模型1号、6号和33号特征点进行特征修正后,标注的特征点坐标及曲率。标记的具体参数如表2所示,利用文献[12]的方法得到高斯曲率绝对值最大值KGmax,以方便对比分析。
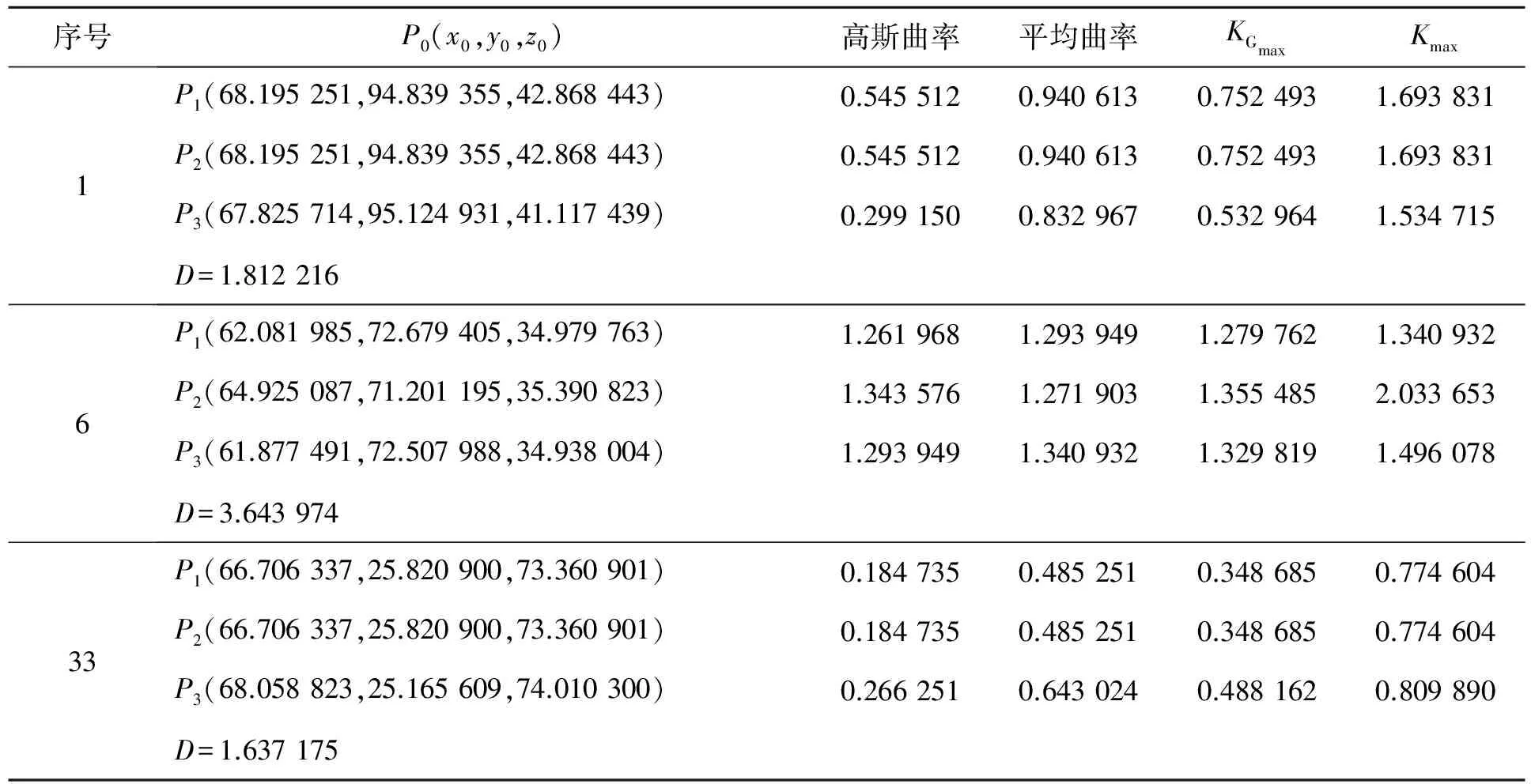
表2 改进后方法对特征点1、6、33的标注情况

4 结 论

[1] 孟勃,韩广良. 基于改进的尺度不变特征变换特征点匹配的电子稳像方法[J].计算机应用,2012,32(10):2817-2820. MENG B,HAN G L. Electronic image stabilization method using improved scale invariant feature transform [J].JournalofComputerApplications, 2012,32(10):2817-2820.(in Chinese)
[2] 李根,李文辉. 基于思维进化算法的人脸特征点跟踪[J]. 吉林大学学报(工学版),2015,45(2):606-612. LI G,LI W H.Facial feature tracking based on mind evolutionary algorithm [J].JournalofJilinUniversity(EngineeringandTechnologyEdition), 2015,45(2):606-612.(in Chinese)
[3] 胡俊华,田锦会.医学图像三维重建技术研究新进展 [J].中国科技信息,2013(11):117-117. HU J H,TIAN J H. New research progress of medical image reconstruction technology [J].ChinaScienceandTechnologyInformation,2013(11):117-117.(in Chinese)
[4] BALLERINI L,CALISTI M,CORDON O.Auto-matic feature extraction from 3D range images of skulls [J].CompuationalForensics,2008,5158:58-69.
[5] BIAN Z, TONG R.Feature-preserving mesh denoising based on vertices classidication [J].ComputerAidedGeometricDesign, 2008, 28(1):50-64.
[6] 许婉露,李彬,田联房.基于MC算法的高质量脊柱CT图像三维重建[J].计算机应用与软件,2013,30(6):79-92. XU W L,LI B,TIAN L F. High-quality 3D reconstruction of spine CT image based on MC algorithm [J].ComputerApplicationsandSoftware,2013,30(6):79-92.(in Chinese)
[7] 李康,尚鹏,耿国华. 基于深度图像的人脸模型特征点自动标定[J].计算机科学,2014,41(4):287-291. LI K,SHANG P, GENG G H.. Automatic location of feature points on three-dimensional facial model based on depth image [J].ComputerScience,2014,41(4):287-291.(in Chinese)
[8] 翟凤文,党建武,王阳萍,等.形状特征和置信传播在去除SIFT 特征点错误匹配中的应用[J]. 计算机辅助设计与图形学学报,2016,28(3).443-449. ZHAI F W,DANG J W, WANG Y P,etal.. Application of shape context and belief propagation in removing SIFT mismatches [J].JournalofComputer-AidedDesign&ComputerGraphics,2016,28(3):443-449.(in Chinese)
[9] 谢易辰,陈健,闫镔,等. 三维特征点距离特征集合求交匹配方法[J]. 红外与激光工程,2014,43(8):2728-2732. XIE Y CH,CHEN J, YAN B,etal..Distance feature set intersection for 3D feature matching [J].InfraredandLaserEngineering,2014,43(8):2728-2732.(in Chinese)
[10] 王澜,孙博,隆昌宇,等. 一种基于共线特征点的线阵相机内参标定方法[J]. 红外与激光工程,2015,44(6):1878-1883. WANG L,SUN B, LONG CH Y,etal..A novel method for calibrating intrinsic parameters of linear array cameras based on collinear feature points [J].InfraredandLaserEngineering, 2015,44(6):1878-1883.(in Chinese)
[11] WANG J, ZHANG X, YU Z.A cascaded approach for feature-preserving surface mesh denoising [J].Computer-AidedDesign, 2012, 44(7): 597-610.
[12] 韩霜. 三维脊椎模型特征点标注的研究与实现[D].西安:西安电子科技大学,2013. HAN SH.Researchandimplementationoftaggingthree-dimensionalmodelofthespinewithfeaturepoints[D].Xi’an:Xidian University,2013.(in Chinese)
[13] JING X,SIMON B,IAIN M,etal..Real-time combined 2D+3D active appearance model [J].Proceedingofthe2004IEEEComputerSocietyConferenceonComputerVisionandPatternRecognition,2004,27(2):535-542.
[14] TEKALP A M, OSTERMANN J. “Face and 2-D Mesh animation in MPEG-4,”Tutorial Issue On The MPEG-4 Standard [J].ImageCommunicationJournal,Elsevier, 1999.
[15] 李瑞祥. 实用人体解剖彩色图谱[M] 北京:人民卫生出版社,2001:6. LI R X.ColorMapsofPracticalHumanAnatomical[M].Beijing:People’s Medical Publishing House,2001:6.(in Chinese)
[16] 陈维桓. 微分几何[M]. 北京:北京大学出版社,2006. CHEN W H.DifferentialGeometry[M]. Beijing:Peking University Press,2006.(in Chinese)

惠 宇(1984-),男,陕西岐山人,博士研究生, 2009年于西安电子科技大学获得硕士学位,主要从事医学影像处理、软件工程、有限元计算的研究。E-mail:289178013@qq.com

武君胜(1962-),男,陕西礼泉人,教授,博士生导师。1983年于西北大学获得学士学位;1990年于中国航空计算技术研究所获得硕士学位;1997年于西北工业大学获得博士学位。主要从事计算方法、科学计算可视化、软件工程研究。E-mail:wujunsheng@nwpu.edu.cn
(版权所有 未经许可 不得转载)
Improvement of feature point annotation for three-dimensional spine model based on curvature multiple feature fusion
HUI Yu1, WU Jun-sheng2, YU Bin3, ZHANG Chen3, WU Zhen2
(1. College of Computer Science, Northwestern Polytechnical University, Xi′an 710072, China;2.CollegeofSoftwareandMicroelectronics,NorthwesternPolytechnicalUniversity,Xi′an710072,China;3.CollegeofComputerScience,XidianUniversity,Xi′an710072,China)
Because the precise coordinate description and accurate matching of physiology of the lumber spine have not yet reached the accuracy requirement of the medicine, this paper researches how to describe the physical coordinates of lumber spine feature points precisely. The definition and traditional annotation method of human spine sample features were introduce. Then, an improved method to adaptively annotate the feature points was proposed based on curvature multiple feature fusing to solve the problem of weaker precision for the manual annotation of feature points. In this method, the definiting values of Gaussian curvature and average curvature of a certain feature point were found out firstly, and a relative maximum value of curvature of the feature point was obtained. Then, the relative maximum values of all the model points within a specified minimum radiusrwere obtained. Since the larger the curvature of maximum value was, the larger the crook degree of the 3-dimensioanl model surface on the point was, and the point can show the outline of the 3-dimensional model. Therefore, the maximum value was taken as the curvature description of the feature point to replace the manual pick up point, thus the feature variation of the point could be described precisely. Finally, the verification results were analyzed, and the results indicate that the improved method increases the accuracy by 37% as compared with that of traditional annotation methods. These results demonstrate that the new method is feasibility and effectiveness.
spine;3D model; feature point annotation; curvature multiple feature fusion; maximum value of the curvature
2016-07-14;
2016-09-04.
国家自然科学基金资助项目(No.61172147)
1004-924X(2016)11-2872-08
TP391.4
A
10.3788/OPE.20162411.2872
*Correspondingauthor,E-mail:289178013@qq.com
